

Fabrication industrielle
Robot industriel
Présentation : Il y a quelques années à peine, il semblait que les économies de main-dœuvre étaient le facteur déterminant qui a poussé les fabricants à étudier lautomatisation. Le retour sur investissement était en grande partie calculé par le nombre de personnes que lautomatisation remplacerait.

Le cortex cérébral est la partie du cerveau qui traite les images. Les êtres humains ont le plus grand cortex cérébral par rapport aux autres mammifères. Cette vision supérieure est lun des traits évolutifs qui ont donné aux humains un avantage sur les autres animaux. Les biologistes évolutionnistes
Les problèmes avec les caméras de vision industrielle, les capteurs non calibrés ou les ombres imprévisibles peuvent entraîner des erreurs potentiellement coûteuses et dangereuses dans les systèmes dIA industriels. Cependant, les chercheurs développent des algorithmes de protection contre les erreur
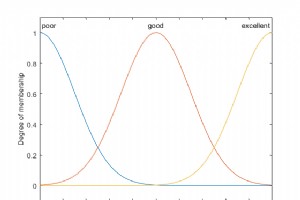
La logique floue peut ne pas sembler être le moyen le plus fiable de mettre en œuvre un système de contrôle complexe. Cependant, la capacité des systèmes de logique floue à travailler avec des données imprécises et à mettre en œuvre lexpérience dexperts en fait un outil puissant dans les application

Utilisation de contrôleurs logiques programmables (PLC) pour les cellules de robot Les cellules robotisées nécessitent souvent un contrôleur pour exécuter des parties de la cellule qui ne font généralement pas partie du champ de travail du robot. Un contrôleur, généralement un automate programmable

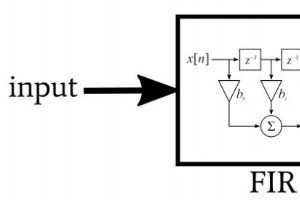
Les contrôleurs à logique floue sont, littéralement, tout autour de nous. Des systèmes de freinage antiblocage aux machines à laver qui nettoient nos vêtements. Mais fonctionnent-ils vraiment ? Et quels sont les avantages de les utiliser ? Figure 1. Lusinage moderne dépend souvent dune logique f
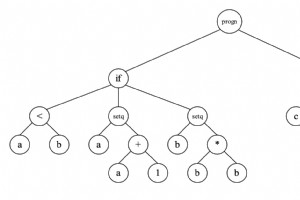
Peut-être le « Saint Graal » de linformatique aura-t-il été découvert le jour où nos machines pourront écrire leurs propres programmes. La programmation génétique (GP) est un paradigme dapprentissage automatique relativement nouveau qui représente un pas dans cette direction. GP est très prometteu

La révolution informatique a commencé avec la création des circuits intégrés (CI) dans les années 1960. LIC a trouvé sa place dans de nombreuses industries au cours du dernier demi-siècle. Aujourdhui, il existe divers appareils informatiques utilisés dans divers secteurs. Initialement, le logiciel

La robotique industrielle ne manque pas de marques, de modèles, de couleurs, de formes et de tailles. Mais en ce qui concerne les conceptions mécaniques, de nombreuses similitudes sont observées entre toutes les marques. Les bras de robot articulés industriels sont souvent considérés comme limage

Posséder une voiture était autrefois un élément fondamental dun accès facile aux transports. Aujourdhui, on peut invoquer une voiture avec une application téléphonique, et une voiture sera disponible. Vous navez pas à vous soucier de la maintenance, de lentretien, des dommages, des assurances ou aut

La première révolution industrielle a commencé au 18ème siècle avec linvention et lavancement des moteurs à vapeur. Dautres avancées technologiques ont entraîné la production de masse et lautomatisation. Ces technologies représentaient les trois premières évolutions de la révolution industrielle, av

À ce stade de la série de programmation génétique (GP), nous avons appris ce quest la programmation génétique et comment elle représente linformation, comment les opérateurs génétiques fonctionnent dans les algorithmes évolutionnaires et avons travaillé à faire évoluer un programme de tri par régres

Les capteurs de distance laser ont de nombreuses utilisations dans les industries de la robotique et de lautomatisation. Ils peuvent couvrir de nombreuses facettes différentes de lindustrie, mais cet article se concentre sur les mises à niveau des cellules pour une technologie obsolète utilisant des
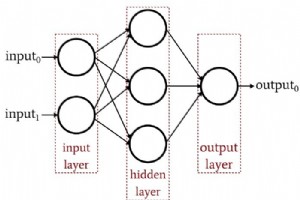
Nous pouvons grandement améliorer les performances dun Perceptron en ajoutant une couche de nœuds cachés, mais ces nœuds cachés rendent également lentraînement un peu plus compliqué. Jusquà présent, dans la série AAC sur les réseaux de neurones, vous avez appris la classification des données à laid
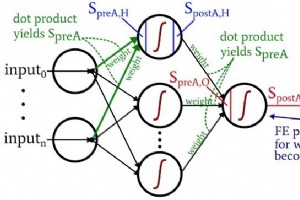
Cet article présente les équations que nous utilisons lors des calculs de mise à jour du poids, et nous discuterons également du concept de rétropropagation. Bienvenue dans la série dAAC sur lapprentissage automatique. Retrouvez la série jusquà présent ici : Comment effectuer une classification à
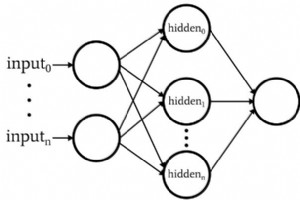
Cet article traite de la configuration Perceptron que nous utiliserons pour nos expériences avec la formation et la classification des réseaux de neurones, et nous examinerons également le sujet connexe des nœuds de biais. Bienvenue dans la série darticles techniques sur les réseaux de neurones All
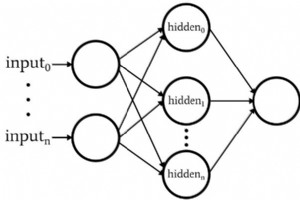
Cet article vous guide pas à pas à travers un programme Python qui nous permettra dentraîner un réseau de neurones et deffectuer une classification avancée. Il sagit de la 12e entrée de la série de développement de réseaux neuronaux dAAC. Découvrez ce que la série propose dautre ci-dessous : Comme
Cet article explique pourquoi la validation est particulièrement importante lorsque nous traitons des données à laide dun réseau de neurones. La série dAAC sur le développement de réseaux de neurones se poursuit ici avec un aperçu de la validation dans les réseaux de neurones et du fonctionnement d
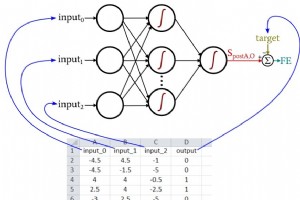
Dans cet article, nous utiliserons des exemples générés par Excel pour entraîner un Perceptron multicouche, puis nous verrons comment le réseau fonctionne avec des exemples de validation . Si vous cherchez à développer un réseau de neurones Python, vous êtes au bon endroit. Avant dapprofondir la di
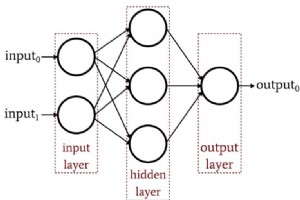
Cet article fournit des directives pour configurer la partie cachée dun Perceptron multicouche. Jusquà présent, dans cette série sur les réseaux de neurones, nous avons discuté des NN Perceptron, des NN multicouches et de la façon de développer de tels NN à laide de Python. Avant de discuter du nom
Robot industriel



![Comment mettre à niveau le lit de votre imprimante 3D. [Guide facile étape par étape]](https://www.mfgrobots.com/article/uploadfiles/202207/2022073011481519_S.jpg)
