


Influence de la rigidité élastique et de l'adhérence de surface sur le rebond des nanoparticules
Résumé
Les collisions granulaires sont caractérisées par une vitesse seuil, séparant le régime à faible vitesse d'adhérence des grains du régime à haute vitesse de rebond des grains :la vitesse de rebond, v b . Ce paramètre est particulièrement important pour les nanograins et a des applications par exemple en astrophysique où il entre dans la description de l'agrégation de poussières collisionnelles. Les estimations analytiques sont basées sur la théorie macroscopique de Johnson-Kendall-Roberts (JKR), qui prédit la dépendance de v b sur le rayon, la rigidité élastique et l'adhérence superficielle des grains. Ici, nous effectuons des simulations atomistiques avec des potentiels de modèle qui nous permettent de tester ces dépendances pour les collisions de nanograins. Nos résultats montrent non seulement que JKR décrit bien qualitativement la dépendance vis-à-vis des paramètres des matériaux, mais indiquent également des écarts quantitatifs considérables. Ce sont les plus prononcés pour les petites adhérences, où la rigidité élastique n'influence pas la valeur de la vitesse de rebond.
Contexte
On peut soutenir que le processus le plus fondamental de la mécanique granulaire est la collision de deux grains. À des vitesses de grains élevées, les grains se séparent à nouveau après la collision, et le résultat de la collision peut être caractérisé par la mécanique classique des collisions inélastiques. À de petites vitesses de grain, cependant, les grains vont coller. La limite entre les collisions collantes et rebondissantes [1] peut être appelée la vitesse de rebond, v b . Ce paramètre est particulièrement important pour les nanograins et a des applications par exemple en astrophysique où il entre dans la description de l'agrégation de poussières collisionnelles [2, 3].
La mécanique de contact macroscopique a été utilisée pour dériver une prédiction pour v b . Il est basé sur la théorie de Johnson-Kendall-Roberts (JKR) [4], qui décrit la collision de deux sphères adhésives en utilisant la rigidité élastique et l'adhérence de surface comme entrée de base de la physique. Quantitativement, ces quantités sont décrites par le module d'indentation, E ind =E /(1−ν 2 ), où E est le module de Young et ν le nombre de Poisson, et par l'énergie de surface γ . Avec le rayon de la sphère R et la masse volumique ρ , la vitesse de rebond de deux sphères identiques s'écrit [1, 5, 6]
$$ {v_{b}} =\left(\frac {C} {\rho} \right)^{1/2}\left(\frac {\gamma^{5}} {E_{\text{ind }}^{2} R^{5}} \right)^{1/6}. $$ (1)La valeur de la constante C dépend fortement des hypothèses de dissipation d'énergie pendant la collision et a été discuté pour supposer des valeurs comprises entre 0,3 et 60 [1, 7].
La validité de cette prédiction a été principalement étudiée en fonction de sa dépendance à la taille [1, 5-8]. Avec la diminution de la taille des grains, les forces d'adhérence deviennent plus importantes et la vitesse de rebond augmente. En effet, des expériences sur des nanograins (grains Ag et NaCl) [9] trouvent v b être de l'ordre de 1 m/s pour des tailles de grains de quelques 10 nm, mais augmenter fortement pour des grains plus petits. Des simulations atomistiques basées sur la dynamique moléculaire (MD) ont confirmé le R prédit −5/6 dépendance pour les collisions entre grains de silice amorphe de tailles R =15-25 nm [7].
Jusqu'à présent, la dépendance prédite de v b sur les paramètres matériaux E ind et γ n'a pas été testé en détail. Ce n'est pas facile à faire dans l'expérience, car différents matériaux diffèrent généralement dans les deux quantités. Cependant, en utilisant MD, nous pouvons construire des matériaux modèles, qui ont des propriétés identiques, mais ne diffèrent que par un aspect, soit E ind ou γ . Dans cet article, nous choisissons un modèle pour Cu [10] mais faisons varier généreusement les paramètres des matériaux jusqu'à un ordre de grandeur par rapport aux valeurs réelles. Comme nous ne trouvons aucun rebond pour les nanoparticules amorphes dans ce système, nous nous concentrons sur les grains cristallins (fcc).
Méthodes/Expérimental
Nous utilisons le potentiel Morse,
$$ U(r) =D \left[ e^{-2\alpha(r-r_{0})} - 2 e^{-\alpha(r-r_{0})} \right], $$ (2)pour décrire l'interaction entre deux atomes de distance r . Les trois paramètres Morse D , α , et r 0 sont déterminés pour décrire la constante de réseau a , le module de vrac B , et l'énergie de cohésion E coh d'un solide fcc en vrac.
Pour plus de précision, nous fixons la constante de réseau à a =3,615 Å (approprié pour Cu) dans cette étude et adopter également la masse atomique de Cu, afin de conserver la masse volumique ρ dans l'éq. (1) fixe. Le potentiel est coupé à r c =2.5a; ainsi, 12 couches voisines, dont un total de 248 atomes, interagissent avec chaque atome. Un nombre de 100 potentiels sont évalués pour B dans la plage de 403 à 1008 GPa, et E coh dans la plage de 0,35 à 3,54 eV. Notez que les modules de masse étudiés ici sont plus grands, et les énergies de cohésion sont plus petites, que les valeurs de Cu réel (B =134,4 GPa, E coh =3,54 eV [11]), puisque pour les valeurs réelles, nous n'avons observé aucun rebond.
On détermine le module d'indentation E ind pour la contrainte uniaxiale dans la direction (100) à partir du module d'Young et du nombre de Poisson dans cette direction ([12], p. 32). La figure 1a montre la dépendance de E ind sur B . On voit que ces quantités obéissent à une relation linéaire; à module de masse constant, une diminution de l'énergie de cohésion laisse E ind augmenter.

Paramètres des matériaux. Dépendance de a le module d'indentation E ind sur le module de vrac B et de b l'énergie de surface γ sur l'énergie de cohésion E coh
L'énergie de surface de (100) facettes est calculée à partir de la différence d'énergie d'un cristal massif et d'un cristal avec une surface ouverte (100) en divisant par la surface de la surface ouverte [13]. La figure 1b montre que γ est à peu près proportionnel à E coh; les écarts ne sont visibles que pour les plus petites rigidités et les matériaux fortement liés.
On construit des grains en coupant une sphère de rayon R =9a =33 Å sur le réseau fcc, contenant environ 12 000 atomes. En raison de leur construction, ils ont une surface facettée. Ils sont relaxés afin d'équilibrer leurs surfaces; légère relaxation de surface, mais aucune reconstruction de la surface n'a été observée. Les collisions sont déclenchées en dupliquant les grains et en les tirant les uns vers les autres avec une vitesse relative v . Seules les collisions centrales sont considérées, où les deux facettes (100) en vis-à-vis entrent en collision frontale, voir Fig. 2.

Configuration initiale de la collision
Pour déterminer la vitesse de rebond, nous effectuons des collisions avec plusieurs vitesses. L'algorithme utilisé ici est basé sur un schéma de bissection simple. Nous avons vérifié que les collisions à une vitesse de 250 m/s rebondissent pour tous les systèmes de collision étudiés ici, tandis qu'à vitesse nulle, les collisions restent collées. Ensuite, les simulations sont exécutées à la moyenne arithmétique de la vitesse de rebond connue la plus faible et de la vitesse de collage connue la plus élevée. Cette procédure est répétée jusqu'à ce que la différence entre la vitesse de collage la plus élevée et la vitesse de rebond la plus faible soit inférieure à 10 % de leur valeur moyenne. v b est considérée comme la moyenne arithmétique de la vitesse de collage la plus élevée et de la vitesse de rebond la plus faible ; ces deux dernières valeurs sont également prises pour indiquer l'erreur de notre calcul dans les tracés. Les simulations ont été réalisées à l'aide du logiciel open source LAMMPS [14], et le code est essentiellement le même que celui utilisé dans nos précédentes études sur les collisions de silice [7] et de particules eau-glace [15].
Résultats
La figure 3 donne un aperçu des résultats obtenus. Un ajustement global de la loi de puissance est fourni par
$$ {v_{b}} \propto \gamma^{0.588} E_{\text{ind}}^{-0.155}. $$ (3)
Vitesse de rebond. Graphique tridimensionnel de la dépendance de la vitesse de rebond v b sur le module d'indentation E ind et l'énergie de surface γ
Ainsi, les principales caractéristiques de la loi JKR, Eq. (1)—une augmentation de v b avec l'adhérence et une diminution avec la rigidité élastique—sont reproduits, mais les dépendances sont plus faibles que celles du cas JKR.
La figure 4 examine plus en détail ces dépendances. Puisque nous avons déterminé les vitesses de rebond pour les matériaux avec soit B fixe ou E coh , nous allons les analyser pour ces valeurs fixes, mais présenter les dépendances en termes de E ind et γ afin de faire le lien avec la prédiction JKR, l'Eq. (1). Pour une énergie de cohésion constante E coh , v b dépend comme une loi de puissance de la raideur élastique,
$$ v_{b} \propto E_{\text{ind}}^{-a}, $$ (4)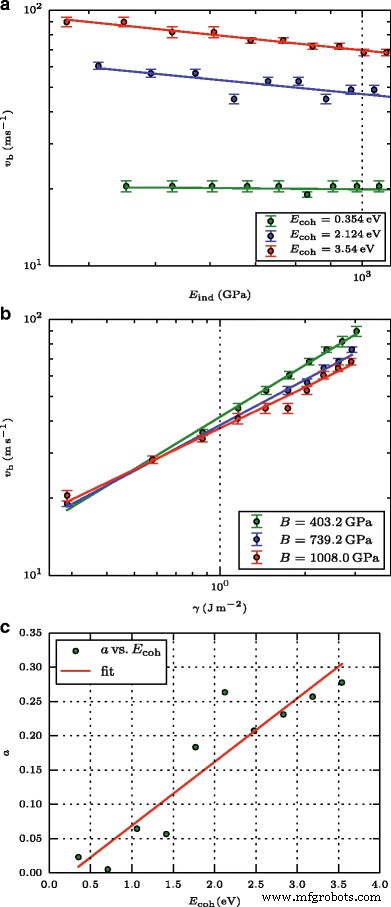
Vitesse de rebond. Dépendance de la vitesse de rebond v b sur le a module d'indentation E ind et le b énergie de surface γ . Les lignes indiquent des ajustements de loi de puissance. c affiche la dépendance de l'exposant de puissance, a , Éq. (4), sur l'énergie de cohésion. La ligne indique un ajustement linéaire pour guider l'œil
où un =0,28 (0,26, 0,02) pour E coh =3,54 (2,12, 0,35) eV. Ainsi, l'exposant a =0.33 prédit par JKR est en effet presque récupéré pour les hautes énergies de surface; cependant, la dépendance devient plus douce avec la diminution de γ et disparaît complètement pour les surfaces faiblement adhésives. Notez que dans le cas de la disparition de l'énergie de surface, toutes les collisions doivent rebondir ; ceci explique le rôle évanouissant de la raideur élastique dans ce cas.
La figure 4c affiche les exposants de puissance de la dépendance de v b (E ind ), Éq. (4), obtenu à partir de nos simulations. L'intrigue démontre clairement l'augmentation de la dépendance à l'égard de E ind avec une énergie de cohésion croissante, et donc une énergie de surface, comme indiqué par la ligne d'ajustement linéaire rouge.
Pour une rigidité élastique fixe, B , la dépendance de v b sur γ montre une image plus simple, voir Fig. 4 c. Ajustements de la loi de puissance, v b ∝γ −b , donner des valeurs assez cohérentes de b =0,67 (0,59, 0,53) pour B =403 (739, 1008) GPa, et ne montrent donc qu'une faible dépendance à l'égard de B et donc E ind . Notez, cependant, que ces dépendances sont plus douces que la valeur de b =0,83 prédit par l'équation. (1). Avec une rigidité croissante, les écarts par rapport à la prédiction JKR deviennent plus forts. En effet, il est connu que JKR échoue pour les systèmes trop rigides [16, 17]. Pour de tels systèmes, on pense que la théorie de Derjaguin-Muller-Toporov (DMT) [18] s'applique mieux; cependant, aucune prédiction de la vitesse de rebond ne semble avoir émergé de cette théorie.
Dans l'ensemble, les vitesses de rebond trouvées ici sont inférieures à 100 m/s. Nous soulignons que pour des valeurs réalistes du potentiel Morse appropriées pour Cu, nous trouvons un collage sur toute la plage de vitesses, et aucun rebond. Ceci est conforme aux récentes simulations de collisions entre une sphère de Cu (de 7 à 22 nm de diamètre) et une surface d'Al réalisées par Pogorelko et al. [19, 20] qui trouvent le maintien à des vitesses de 1000 m/s. La raison pour laquelle nous trouvons des rebonds dans nos simulations est que nous utilisons des potentiels de modèle dans lesquels les modules d'élasticité sont généreusement augmentés et la liaison de surface est diminuée, par rapport aux valeurs caractérisant le Cu réel.
Au-dessus du seuil de rebond, les collisions sont caractérisées par le coefficient de restitution,
$$ e=|v'|/|v|, $$ (5)qui compare la vitesse relative après collision, v ′ , à celui avant la collision, v , et mesure ainsi l'inélasticité de la collision. Pour les collisions collantes, évidemment, e =0. La théorie JKR suggère une loi [4-6]
$$ e_{\text{JKR}} =\alpha \sqrt{1- \left(\frac{v_{b}}{v} \right)^{2}}, $$ (6)où nous avons introduit le facteur α pour tenir compte de la dissipation d'énergie [7].
La figure 5 présente deux cas de dépendance à la vitesse de e; nous trouvons qu'elles sont représentatives de toute la gamme de valeurs de rigidité et d'adhérence étudiées. Dans tous ces cas, il n'y a pas de dissipation d'énergie importante lors de la collision; α est d'environ 0,9. À des énergies de surface suffisamment grandes, Fig. 5 a, e suit assez bien la prédiction JKR, Eq. (6). Au petit γ , cependant, Fig. 5b, une zone de transition plus étroite est observée, dans laquelle e passe de 0 à presque 1 ; cette zone de transition n'est pas bien décrite par la prédiction JKR, Eq. (6).

Coefficient de restitution. Dépendance du coefficient de restitution, e , sur la vitesse de collision, v , pour une forte (γ =2.32 J/m 2 ) (a ) et un faiblement (γ =0.89 J/m 2 ) (b ) surface adhésive. Le module de compression est identique dans les deux cas, B =940.8. Les symboles indiquent les résultats de la simulation, tandis que la courbe correspond à la prédiction JKR, Eq. (6), avec α =0.86 (a ) et 0,95 (b )
Discussion
Dans le régime de collage, le coefficient de restitution reste inférieur à 1 indiquant des pertes d'énergie inélastiques lors de la collision. Nous avons vérifié que les collisions sont purement élastiques dans le sens où aucune plasticité permanente n'a été générée lors de la collision; l'outil logiciel OVITO [21] a été utilisé pour vérifier la production de luxations. Pour des vitesses plus élevées, v> 100 m/s et sphères conformes, des dislocations se sont formées de manière transitoire mais ont à nouveau disparu après la collision. Nous notons que lors de la collision de nanosphères cristallines de taille similaire interagissant via le potentiel générique de Lennard-Jones, une production abondante de dislocations a pu être détectée [22, 23], tandis que des zones de transformation de cisaillement ont été identifiées dans la collision de sphères de silice amorphe [7], les deux les systèmes de collision présentent donc une plasticité. Dans notre cas, les modules d'élasticité élevés empêchent l'établissement de déformation plastique; les pertes d'énergie inélastiques ne sont causées que par l'excitation de vibrations dans les sphères en collision. On peut conclure que l'existence de collisions rebondissantes est liée à une suppression des pertes inélastiques lors des collisions et donc à la suppression de la déformation plastique.
Le comportement de e pour les petits γ souligne nos conclusions ci-dessus pour v b que des écarts importants par rapport à JKR sont observés pour les systèmes faiblement adhésifs. Nous concluons que pour une adhérence faible, la vitesse de rebond, ainsi que l'état du système après rebond ne dépendent que faiblement d'autres caractéristiques du système, telles que E ind et v .
Conclusions
La prédiction de la théorie JKR des contacts élastiques adhésifs a été testée par des simulations MD dédiées de nanograins à l'aide de potentiels modèles. Nous trouvons que les tendances brutes de la dépendance de la vitesse de rebond sont raisonnablement bien reproduites par la théorie JKR lors de la variation de la rigidité du matériau et de l'adhérence du matériau jusqu'à un ordre de grandeur. Cependant, on retrouve des écarts systématiques pour les grains faiblement adhésifs; dans ce cas, le seuil de rebond devient indépendant de la rigidité du matériau, et le coefficient de restitution ne présente presque aucune dépendance à la vitesse au-dessus de v b . Également pour une adhérence plus forte, la dépendance de la vitesse de rebond sur γ est systématiquement plus petit que celui prédit par JKR.
Ces écarts indiquent une description incomplète des collisions de nanoparticules par la théorie macroscopique du contact. Des travaux futurs tenteront d'étendre cette étude aux grains cristallins avec d'autres orientations et avec des rayons plus grands, et aux grains amorphes.
Nanomatériaux
- Nanoparticules pour le traitement du cancer :progrès actuels et défis
- Préparation et propriétés magnétiques des nanoparticules de spinelle FeMn2O4 dopées au cobalt
- Synthèse facile et propriétés optiques de petits nanocristaux et nanotiges de sélénium
- Étude in vitro de l'influence des nanoparticules Au sur les lignées cellulaires HT29 et SPEV
- Formation et propriétés luminescentes de nanocomposites Al2O3:SiOC à base de nanoparticules d'alumine modifiées par le phényltriméthoxysilane
- Influence de la rigidité élastique et de l'adhérence de surface sur le rebond des nanoparticules
- Progrès récents dans les méthodes de synthèse et les applications des nanostructures d'argent
- Services de meulage de surface :processus et précision
- Qu'est-ce que le meulage de surface et pourquoi est-ce important ?