


Robot de résolution de labyrinthe, utilisant l'intelligence artificielle
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 |
Applications et services en ligne
 |
| |||
 |
|
À propos de ce projet
Présentation
Ce tutoriel a été développé sur mon dernier projet :Line Follower Robot - PID Control - Android Setup. Une fois que vous avez un robot avec des capacités de suivi de ligne, la prochaine étape naturelle consiste à lui donner un certain degré d'intelligence. Alors, notre cher "Rex, le Robot" va maintenant essayer de trouver comment s'échapper d'un "labyrinthe" sur le chemin le plus court et le plus rapide (d'ailleurs, il déteste le Minotaure.
Pour commencer, quelle est la différence entre Maze et Labyrinthe ? Selon http://www.labyrinthos.net, dans le monde anglophone on considère souvent que pour être qualifié de labyrinthe, un dessin doit avoir des choix dans le cheminement. De toute évidence, cela inclura de nombreuses installations modernes dans les parcs de loisirs et les attractions touristiques, y compris notre labyrinthe 2D ici. Le consensus populaire indique également que les labyrinthes ont un chemin qui mène inexorablement de l'entrée au but, bien que souvent par les itinéraires les plus complexes et sinueux.
La majorité des labyrinthes, aussi complexe que leur conception puisse paraître, étaient essentiellement formés d'un mur continu avec de nombreuses jonctions et branches. Si le mur entourant le but d'un labyrinthe est relié au périmètre du labyrinthe à l'entrée, le labyrinthe peut toujours être résolu en gardant une main en contact avec le mur, quels que soient les nombreux détours que cela implique. Ces labyrinthes "simples" sont correctement connus sous le nom de "Simply-connected " ou "labyrinthe parfait " ou en d'autres termes, qui ne contiennent pas de boucles .
De retour à notre projet, il sera scindé en deux parties (ou "passes ") :
- (Premier passage) :Le robot trouve sa sortie d'un "
labyrinthe parfait non connu". Peu importe où vous le placez dans le labyrinthe, il trouvera une "solution".
- (Deuxième passe) :Une fois que le robot a trouvé une solution de labyrinthe possible, il doit optimiser sa solution en trouvant le "
chemin le plus court du début à la fin".
La vidéo ci-dessous montrera un exemple de Rex trouvant son chemin. La première fois que le robot explore le labyrinthe, il va bien sûr perdre beaucoup de temps à "penser " sur ce qu'il faut faire à n'importe quelle intersection. En testant les nombreuses possibilités, il prendra plusieurs mauvais chemins et impasses, ce qui l'obligera à parcourir des chemins plus longs et à effectuer des "Demi-tours inutiles ". Au cours de ce "1er Pass" , le robot accumulera des expériences, "prendre des notes " sur les différentes intersections et éliminer les mauvaises branches. Dans son "2nd Pass ", le robot va droit et rapidement jusqu'au bout sans aucune erreur ni aucun doute. Tout au long de ce tutoriel, nous explorerons en détail comment le faire :
Étape 1 :Bill of Materials
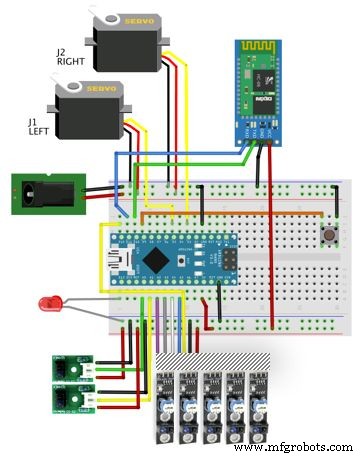
La liste des matériaux est fondamentalement la même que celle utilisée avec le robot suiveur de ligne, sauf que j'ai inclus 2 capteurs supplémentaires pour une meilleure précision de détection des intersections GAUCHE et DROITE :
Le robot final est encore très bon marché (environ 85,00 $) :
Corps (vous pouvez l'adapter en fonction de vos besoins ou des matériaux disponibles) :
- 2 X carrés de bois (80X80mm)
- 3 X clips de reliure
- 2 X roues en bois (diamètre :50 mm)
- 1 X Roulette à billes
- 9 X bandes élastiques
- Bande de cadre de commande 3M
- Joints en plastique pour la fixation du capteur
- Planche à pain et câblage
- 2 x ensembles de batteries 4XNi-Metal Hydride (5 V chaque ensemble)
- 2 X SM-S4303R Rotation Continue 360 Degrés Servo Plastique
- Arduino Nano
- Module Bluetooth HC-06
- 5 capteurs de ligne X (module de capteur suiveur de ligne infrarouge TCRT5000 4CH + 1 capteur de piste indépendant)
- 2 X ZX03 (basé sur TCRT5000) Capteurs infrarouges réfléchissants (sortie analogique)
- 1 LED
- 1 bouton
Remarque :J'ai utilisé l'item 7 ci-dessus avec sortie analogique, car je n'avais pas sous la main de capteurs avec sortie numérique comme ceux de l'item 6. L'idéal est d'avoir tous les capteurs égaux, si possible. Aussi j'ai testé le projet en ne gardant que les 5 capteurs d'origine. Cela fonctionnera, mais nécessite des ajustements plus sensibles lors de la découverte des intersections.
Étape 2 :Changements dans le corps
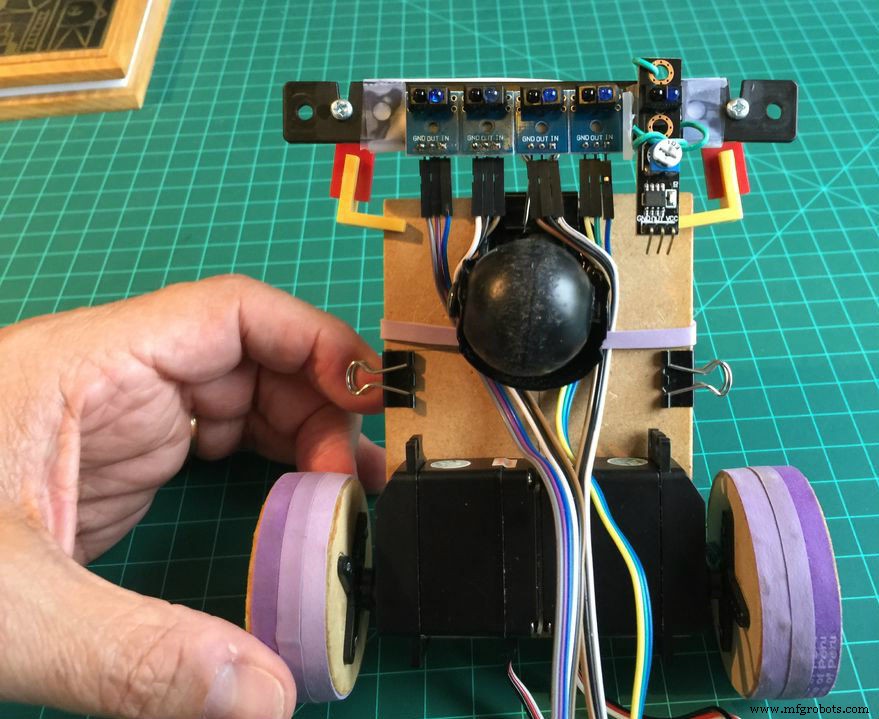

Retirez l'ensemble original de 5 capteurs de suivi de ligne et corrigez le nouveau "Far LEFT" et "Extrême DROITE " capteurs réfléchissants à chaque extrémité de la barre plastique de support. Il est conseillé d'avoir les 7 capteurs aussi alignés que possible.
Étape 3 :Installer et tester les nouveaux capteurs
La nouvelle gamme de maintenant 7 capteurs , est monté de manière à ce que les 5 originaux soient exclusivement utilisés pour le contrôle PID (et la détection de la "ligne complète", expliquée plus loin) et les 2 nouveaux, laissés à être utilisés exclusivement pour la détection d'intersection GAUCHE et DROITE.
Pour rappel rapide, rappelons le fonctionnement des 5 capteurs "numériques" d'origine :
Si un capteur est centré par rapport à la ligne noire, seul ce capteur spécifique produira un HAUT. D'un autre côté, l'espace entre les capteurs doit être calculé pour permettre à 2 capteurs de couvrir simultanément toute la largeur de la ligne noire, produisant également un signal HAUT sur les deux capteurs.
Comment fonctionnent les 2 nouveaux capteurs "analogiques" :
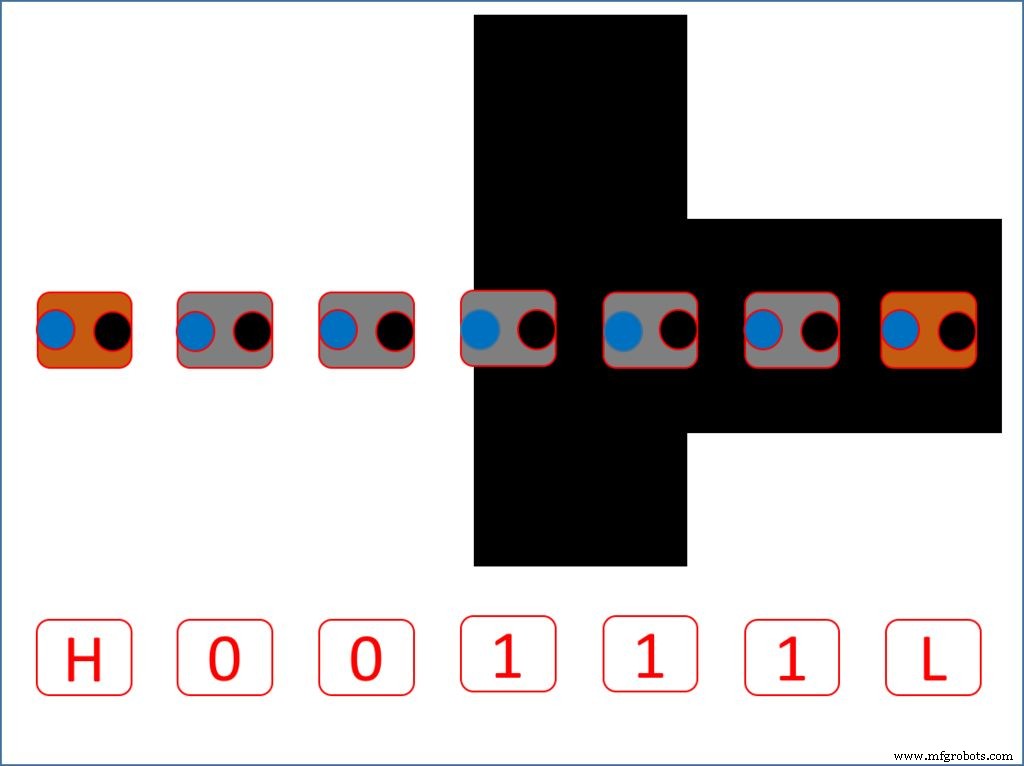
Si l'un des capteurs est centré par rapport à la ligne noire, la sortie sera une valeur analogique, produisant généralement une sortie sur Arduino ADC en dessous de "100" (rappelez-vous que l'ADC produit une sortie de 0 à 1023). Avec des surfaces plus claires, la valeur de sortie sera plus élevée (j'ai testé 500 à 600 sur du papier blanc par exemple). Cette valeur doit être testée sur différentes situations de lumière et de matériaux de surface pour définir la constante de SEUIL correcte à utiliser dans votre cas (voir l'image ici).
En regardant le code Arduino, chacun des capteurs sera défini avec un nom spécifique (considérez que le capteur de suivi de ligne d'origine plus à gauche doit être affecté avec une étiquette "0 ") :
const int lineFollowSensor0 =12 ; //Utilisation de Digital inputconst int lineFollowSensor1 =18; //Utilisation de la broche analogique A4 comme entrée numériqueconst int lineFollowSensor2 =17 ; //Utilisation de la broche analogique A3 comme entrée numériqueconst int lineFollowSensor3 =16 ; //Utilisation de la broche analogique A2 comme entrée numériqueconst int lineFollowSensor4 =19; //Utilisation de la broche analogique A5 comme entrée numériqueconst int farRightSensorPin =0; //Broche analogique A0const int farLeftSensorPin =1; //Broche analogique A1 Pour se rappeler, les 5 sorties possibles du réseau de capteurs d'origine lorsque l'on suit une ligne sont :
1 1 1 1 1 0 0 0 0 0 0 0 0 0 1 0 0 0 1 1 0 0 0 1 0 0 0 1 1 0 0 0 1 0 0 0 1 1 0 0 0 1 0 0 0 1 1 0 0 0 1 0 0 0 0 Avec l'ajout des 2 nouveaux, leurs sorties possibles sont :
- Capteur extrême GAUCHE :sortie analogique supérieure ou inférieure à un SEUIL
- Capteur d'extrême droite :sortie analogique supérieure ou inférieure à un seuil
Afin de stocker les valeurs de chaque capteur, une variable de tableau est créée pour les 5 capteurs numériques d'origine :
int LFSensor[5]={0, 0, 0, 0, 0} ; Et deux variables entières pour les 2 nouveaux capteurs analogiques :
int farRightSensor =0;int farLeftSensor =0; Chaque position du tableau et des variables sera constamment mise à jour avec la sortie de chacun des capteurs :
LFSensor[0] =digitalRead(lineFollowSensor0);LFSensor[1] =digitalRead(lineFollowSensor1);LFSensor[2] =digitalRead(lineFollowSensor2);LFSensor[3] =digitalRead(lineFollowSensor3);LFSensor[4] =digitalRead(lineFollowSensor4);farRightSensor =analogRead(farRightSensorPin);farLeftSensor =analogRead(farLeftSensorPin); Avoir 5 capteurs, comme vu dans le projet Follower Line Robot, permet la génération d'une "variable d'erreur" qui aidera à contrôler la position du robot sur la ligne. De plus, une variable appelée "mode" sera utilisée pour la définition si le robot suit une ligne , sur une ligne continue , une intersection ou pas de ligne du tout.
Cette variable "mode " sera également utilisé avec le "Extrême GAUCHE/DROITE " capteurs. Pour la représentation, considérons les capteurs d'extrême gauche et de droite ayant 3 états possibles :
- H (supérieur au SEUIL),
- L (plus petit que THRESHOLD) et
- X (non pertinent).
Pour les sorties numériques , sera l'habituel 0, 1 et nous introduirons également le X :
- H 0 X X X X L ==> mode =RIGHT_TURN; erreur =0 ; (voir l'exemple sur l'image ci-dessus)
- L X X X X 0 H ==> mode =LEFT_TURN; erreur =0 ;
- X 0 0 0 0 0 X ==> mode =NO_LINE ; erreur =0 ;
- H 0 0 0 0 1 H ==> mode =FOLLOWING_LINE; erreur =4 ;
- H 0 0 0 1 1 H ==> mode =FOLLOWING_LINE; erreur =3 ;
- H 0 0 0 1 0 H ==> mode =FOLLOWING_LINE; erreur =2 ;
- H 0 0 1 1 0 H ==> mode =FOLLOWING_LINE; erreur =1 ;
- H 0 0 1 0 0 H ==> mode =FOLLOWING_LINE; erreur =0 ;
- H 0 1 1 0 0 H ==> mode =FOLLOWING_LINE; erreur =-1 ;
- H 0 1 0 0 0 H ==> mode =FOLLOWING_LINE; erreur =-2
- H 1 1 0 0 0 H ==> mode =FOLLOWING_LINE; erreur =-3;
- H 1 0 0 0 0 H ==> mode =FOLLOWING_LINE; erreur =-4 ;
- X 1 1 1 1 1 X ==> mode =CONT_LINE ; erreur =0 ;
Donc, en implémentant la logique ci-dessus dans la fonction :
void readLFSsensors() renverra les variables "mode " et "erreur " qui sera utilisé à la logique du programme. Il est important de tester la logique des capteurs avant de poursuivre avec le projet. La fonction soufflet est incluse dans le code et peut être utilisée à des fins de test :
void testSensorLogic(void) { Serial.print (farLeftSensor); Serial.print (" <==LEFT RIGH==> "); Serial.print (farRightSensor); Serial.print (" mode:"); Serial.print (mode); Serial.print (" erreur:"); Serial.println (erreur);}
Étape 4 :Résoudre le labyrinthe - La règle de la main gauche

Comme indiqué dans l'introduction, la majorité des labyrinthes, aussi complexe que leur conception puisse paraître, étaient essentiellement formés d'un mur continu avec de nombreuses jonctions et branches. Si le mur entourant le but d'un labyrinthe est relié au périmètre du labyrinthe à l'entrée, le labyrinthe peut toujours être résolu en gardant une main en contact avec le mur, quel que soit le nombre de détours que cela implique. Ces labyrinthes "simples" sont correctement appelés "Simply-connected ."
En cherchant sur Wikipédia, nous apprenons que :
En bref, la règle de la main gauche peut être décrit comme :
À chaque intersection et dans tout le labyrinthe, gardez votre main gauche touchant le mur sur votre gauche.
- Placez votre main gauche sur le mur.
- Commencez à avancer
- Finalement, vous arriverez au bout du labyrinthe. Vous n'emprunterez probablement pas le chemin le plus court et le plus direct, mais vous y arriverez.
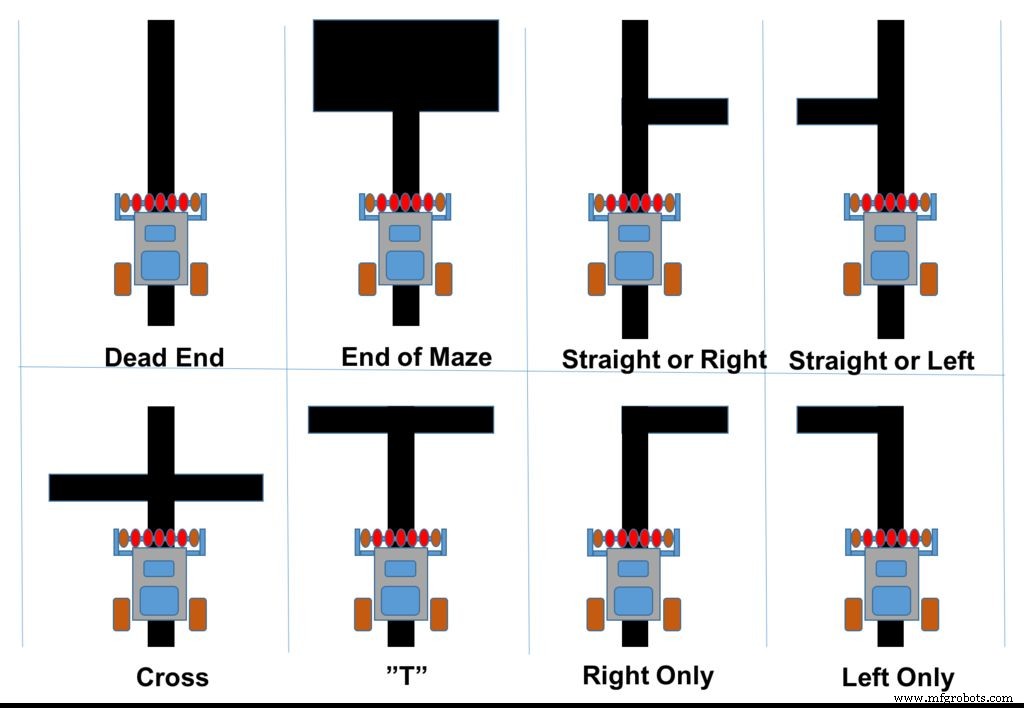
Donc, la clé ici est d'identifier les intersections , définissant le cours à suivre en fonction des règles ci-dessus. Spécifiquement dans notre genre de labyrinthe 2D, nous pouvons trouver 8 types d'intersections différents (voir la première image ci-dessus) :
En regardant l'image, on peut se rendre compte que les actions possibles aux intersections sont :
1. À une "Croix " :
- Aller à gauche, ou
- Aller à droite, ou
- Allez tout droit
2. À un "T " :
- Aller à gauche, ou
- Aller à droite
3. À un "Droit seulement " :
- Aller à droite
4. À un "À gauche seulement " :
- Aller à gauche
5. À "Droite ou gauche " :
- Aller à gauche, ou
- Allez tout droit
6. À "Droit ou à droite " :
- Aller à droite, ou
- Allez tout droit
7. Dans une "impasse " :
- Revenir en arrière (« Demi-tour »)
8. À "Fin du labyrinthe " :
- Arrêtez
Mais, en appliquant la "règle de la main gauche", les actions seront réduites à une option chacune :
- À une "croix" :aller à gauche
- À un "T" :aller à gauche
- À "Droite uniquement" :aller à droite
- À "gauche seulement" :aller à gauche
- À "Droite ou à gauche" :aller à gauche
- À un "droit ou à droite" :allez tout droit
- Dans une "Impasse" :Revenir en arrière ("De retour")
- Au "Fin du Labyrinthe" : Stop
Nous y sommes presque! "Soyez calme !"
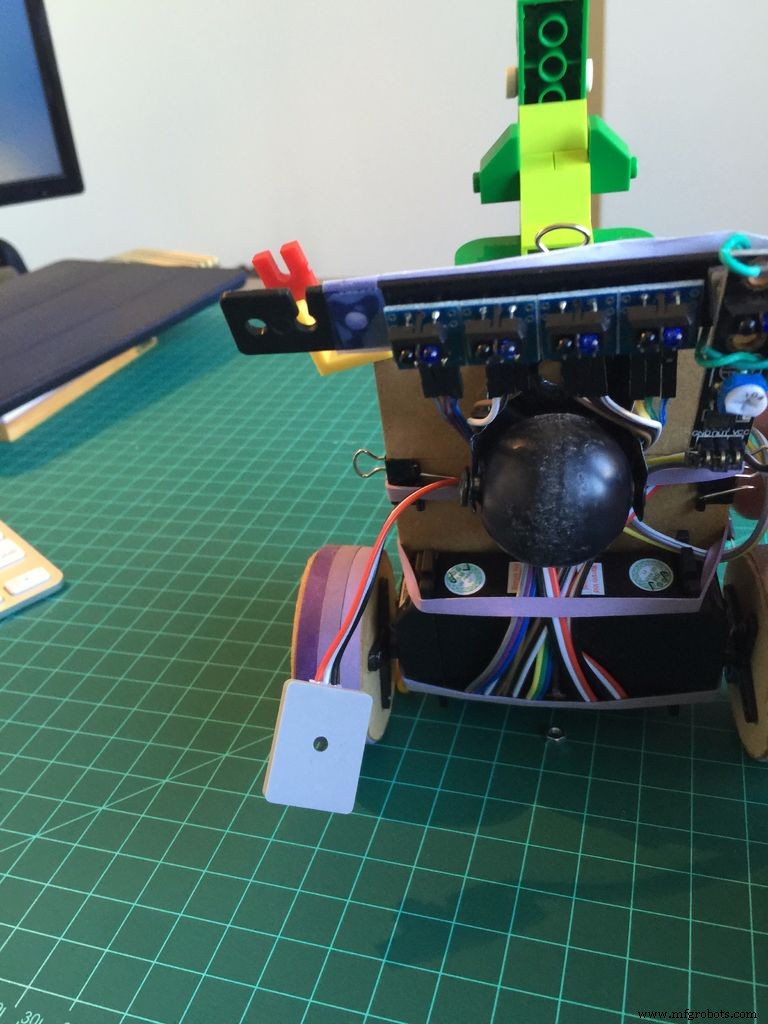
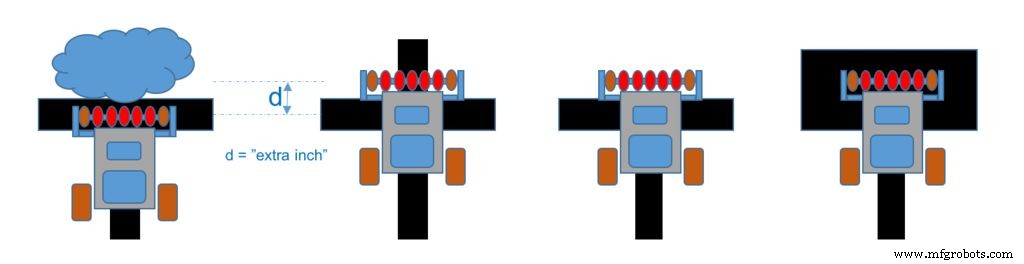
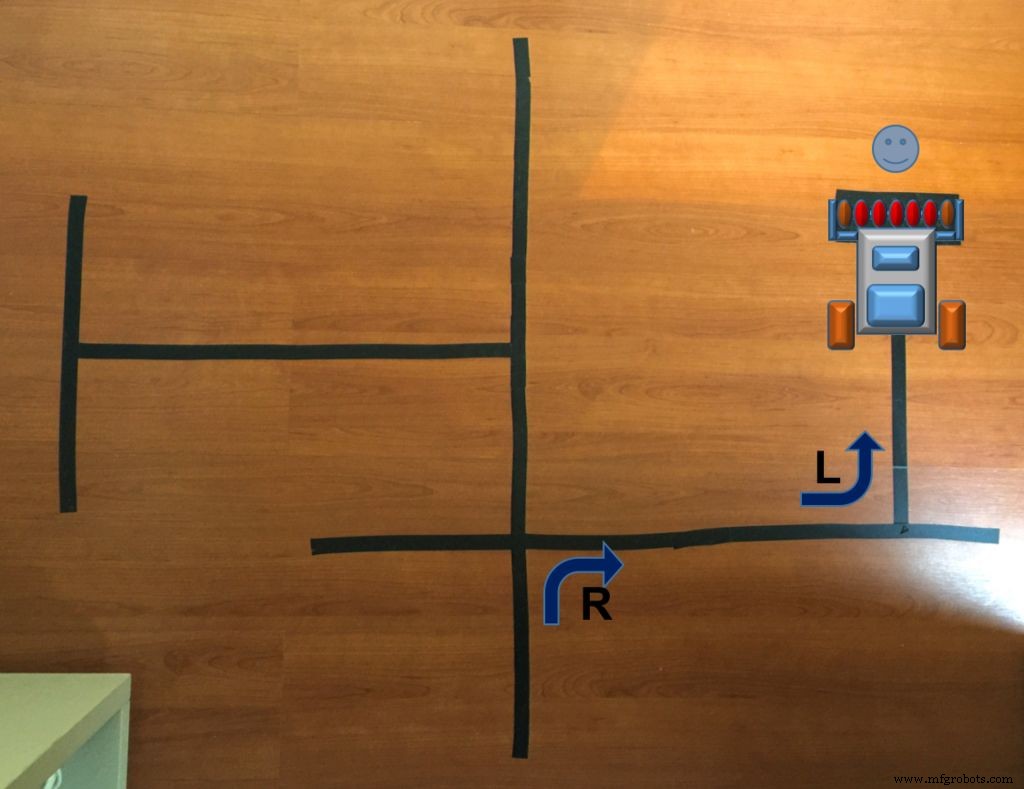
Lorsque le robot atteint une « impasse » ou la « fin d'un labyrinthe », il est facile de les identifier, car il n'existe pas de situations ambiguës (nous avons déjà implémenté ces actions sur le robot suiveur de ligne, vous vous souvenez ?). Le problème est lorsque le robot trouve une " LIGNE " par exemple, car une ligne peut être une " Croix " (1) ou un " T " (2). De plus, lorsqu'il atteint un "virage à gauche ou à droite", il peut s'agir d'un simple virage (options 3 ou 4) ou d'options pour aller tout droit (5 ou 6). Pour découvrir exactement sur quel type d'intersection se trouve le robot, une étape supplémentaire doit être franchie :le robot doit parcourir un "pouce supplémentaire" et voir ce qui va suivre (voir la deuxième image ci-dessus, à titre d'exemple).
Ainsi, en termes de flux, les actions possibles peuvent maintenant être décrites comme :
1. Dans une « impasse » :
- Retour ("De retour")
2. À une "LIGNE" :Courez un pouce supplémentaire
- S'il y a une ligne :C'est une "Croix" ==> Aller à GAUCHE
- S'il n'y a pas de ligne :c'est un "T" ==> Aller à GAUCHE
- S'il y a une autre ligne :c'est la "Fin du Labyrinthe" ==> STOP
3. À un « VIRANT À DROITE » :Courez un centimètre supplémentaire
- s'il y a une ligne :c'est une ligne droite ou droite ==> aller TOUT DROIT
- S'il n'y a pas de ligne :c'est une droite uniquement ==> Aller à DROITE
4. Lors d'un « VIREMENT À GAUCHE » :Courez un centimètre supplémentaire
- s'il y a une ligne :C'est une Droite ou à GAUCHE ==> Aller à GAUCHE
- S'il n'y a pas de ligne :c'est une GAUCHE uniquement ==> Aller à GAUCHE
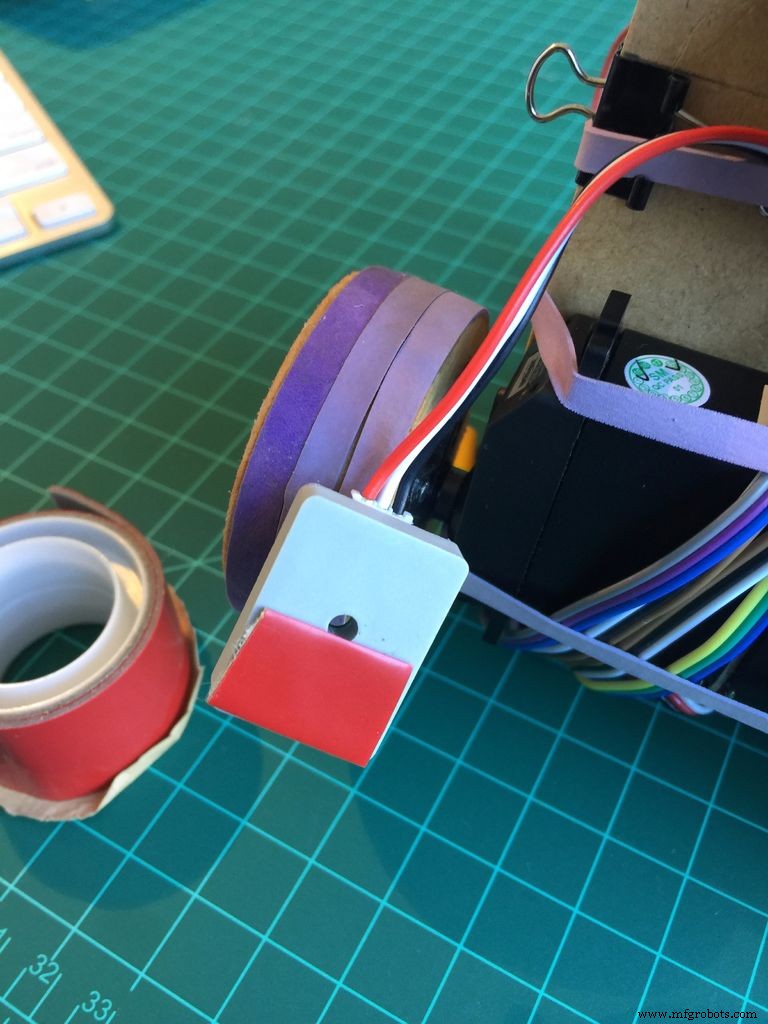
Notez qu'en fait, en cas de « TOUR À GAUCHE », vous pouvez sauter le test, car vous prendrez de toute façon à GAUCHE. J'ai laissé l'explication plus générique uniquement pour plus de clarté. Au vrai code, je sauterai ce test. La 3ème photo ci-dessus montre un labyrinthe très simple sur le sol de mon laboratoire, utilisé à des fins de test.
Étape 5 :Implémentation de l'algorithme "La main gauche sur le mur" dans le code Arduino
Une fois que nous avons le readLFSsensors() fonction modifiée pour inclure les 2 capteurs supplémentaires, nous pouvons réécrire la fonction de boucle pour exécuter l'algorithme comme décrit à la dernière étape :
void loop(){ readLFSsensors(); switch (mode) { case NO_LINE:motorStop(); allerEtTourner (GAUCHE, 180); Pause; case CONT_LINE :runExtraInch(); readLFSsensors(); if (mode ==CONT_LINE) mazeEnd(); sinon goAndTurn (GAUCHE, 90); // ou c'est un "T" ou une "Croix"). Dans les deux cas, va à la pause GAUCHE ; cas RIGHT_TURN:runExtraInch(); readLFSsensors(); if (mode ==NO_LINE) goAndTurn (RIGHT, 90); Pause; cas LEFT_TURN :goAndTurn (LEFT, 90); Pause; case FOLLOWING_LINE:followLine(); Pause; }} Quelques nouvelles fonctions apparaissent ici :
- suivantLigne() est le même que celui utilisé avec le robot de ligne suivante où, s'il ne fait que suivre une ligne, il doit
calculerPID();et contrôler les moteurs en fonction des valeurs PID :motorPIDcontrol();
- runExtraInch() : poussera le robot juste un peu vers l'avant. La durée de fonctionnement du robot dépendra du temps que vous utiliserez dans la fonction de retard, avant de commander l'arrêt du moteur.
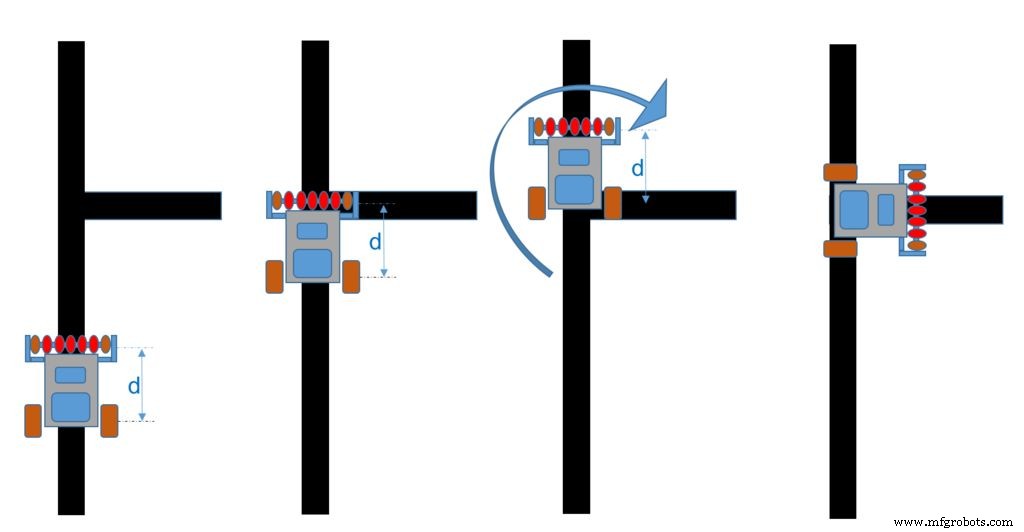
void runExtraInch(void){ motorPIDcontrol(); retard (extraPouce); arrêt moteur();} - goAndTurn (direction, angle) : cette fonction spéciale est importante car vous ne pouvez pas faire tourner le robot dès que vous vous rendez compte du type d'intersection que vous êtes. N'oubliez pas que nous avons projeté un Robot Différentiel qui, lors des virages, "tourne autour de son axe" et donc, pour se déplacer de 90o et suivre continuellement la ligne, le centre des roues doit être aligné avec le centre d'intersection. Une fois que la ligne de capteurs est en avant de son axe, vous devez faire avancer le robot pour les aligner. La constante de temps
adjGoAndTurndoit être ajusté en fonction de la distance entre l'axe et la ligne du capteur ("d"), la vitesse et la taille des roues (voir l'image ci-dessus pour illustration).
void goAndTurn(int direction, int degrés){ motorPIDcontrol(); delay(adjGoAndTurn); motorTurn(direction, degrés);} À ce stade, le robot est en fait en train de « résoudre un labyrinthe » ! Vous venez de terminer le "First Pass". Peu importe où vous commencez dans un labyrinthe, vous atteindrez toujours la fin.
Ci-dessous, un test de cette phase du projet :
Étape 6 : stockage du chemin
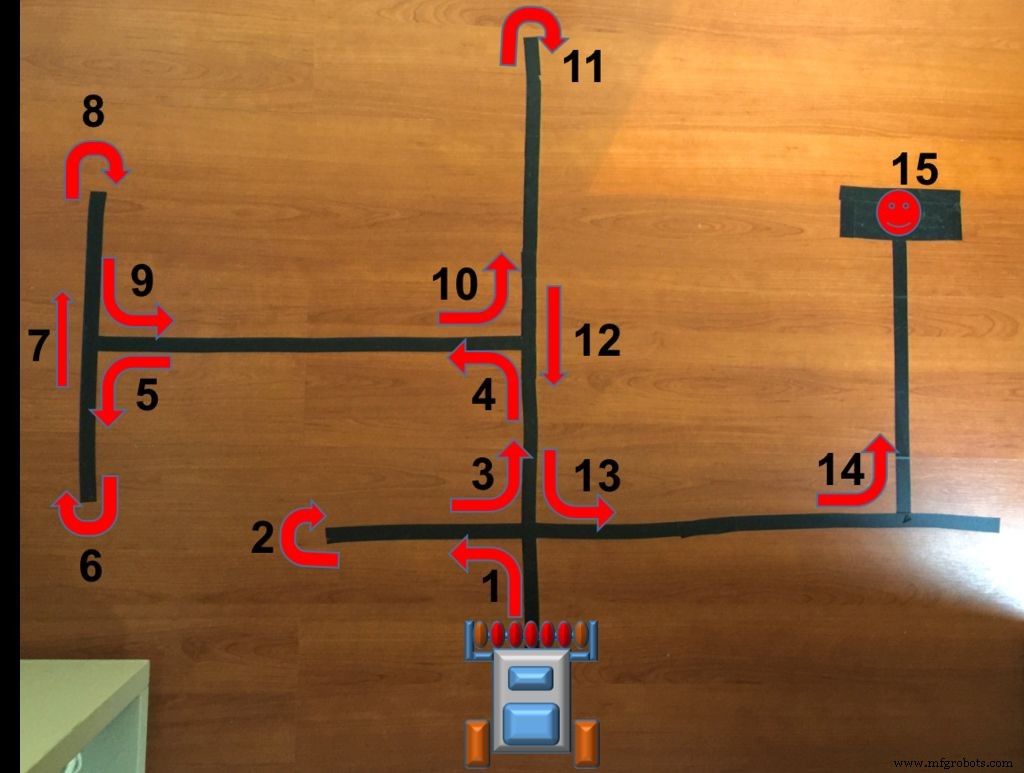
Considérons l'exemple illustré sur la photo ci-dessus. Au point de départ choisi, le robot trouvera 15 Intersections avant d'atteindre la fin du Labyrinthe :
- Gauche (L)
- Retour (B)
- Gauche (L)
- Gauche (L)
- Gauche (L)
- Retour (B)
- Droite (S)
- Retour (B)
- Gauche (L)
- Gauche (L)
- Retour (B)
- Droite (S)
- Gauche (L)
- Gauche (L)
- Fin
Ce qui doit être fait dans l'une de ces intersections, c'est d'enregistrer chaque action effectuée exactement dans la même séquence qu'elle se produit. Pour cela, créons une nouvelle variable (tableau) qui stockera le chemin parcouru par le robot :
char path[100] =" "; Nous devons également créer 2 variables d'index à utiliser avec le tableau :
unsigned char pathLength =0 ; // la longueur du pathint pathIndex =0; // utilisé pour atteindre un élément de tableau spécifique. Donc, si nous exécutons l'exemple montré dans l'image, nous terminerons par :
path =[LBLLLBSBLLBSLL]et pathLengh =14
Étape 7 :Simplifier (optimiser) le chemin
Revenons à notre exemple. En regardant le premier groupe d'intersections, nous avons réalisé que la première branche gauche est en fait une "impasse" et donc, si le robot au lieu d'un "gauche-arrière-gauche" ne passait tout droit qu'à cette première intersection, beaucoup d'énergie et du temps serait gagné ! En d'autres termes, une séquence "LBL" serait en fait la même que "S". C'est exactement ainsi que le chemin complet peut être optimisé. Si vous analysez toutes les possibilités où un « demi-tour » est utilisé, l'ensemble des 3 intersections où ce « demi-tour » (« B ») apparaît (« xBx ») peut être réduit à un seul.
Ce qui précède n'est qu'un exemple, vous trouverez ci-dessous la liste complète des possibilités (essayez-le) :
- LBR =B
- LBS =R
- RBL =B
- SBL =R
- SBS =B
- LBL =S
En prenant le chemin complet ou notre exemple, nous pouvons le réduire :
path =[LBLLLBSBLLBSLL] ==> LBL =Spath =[SLLBSBLLBSLL] ==> LBS =Rpath =[SLRBLLBSLL] ==> RBL =Bpath =[SLBLBSLL] ==> LBL =Spath =[SSBSLL ] ==> SBS =Bpath =[SBLL] ==> SBL =Rpath =[RL] Incroyable! En regardant l'exemple, il est très clair que si le robot prend à DROITE à la première intersection et après cela, à GAUCHE, il atteindra la fin du labyrinthe par le chemin le plus court !
Le code total de First Path of Maze Solver sera consolidé dans la fonction mazeSolve() . Cette fonction est en fait la fonction loop() utilisée auparavant, mais intégrant toutes ces étapes de stockage et d'optimisation du chemin. Une fois le premier chemin terminé, le tableau path[] aura le chemin optimisé. Une nouvelle variable est introduite :
statut int non signé =0 ; // résolution =0; atteindre Maze End =1 Sous la fonction Premier chemin :
void mazeSolve(void){ while (!status) { readLFSsensors(); switch (mode) { case NO_LINE:motorStop(); allerEtTourner (GAUCHE, 180); recIntersection('B'); Pause; case CONT_LINE :runExtraInch(); readLFSsensors(); if (mode !=CONT_LINE) {goAndTurn (LEFT, 90); recIntersection('L');} // ou c'est un "T" ou une "Croix"). Dans les deux cas, va à GAUCHE else mazeEnd(); Pause; cas RIGHT_TURN:runExtraInch(); readLFSsensors(); if (mode ==NO_LINE) {goAndTurn (RIGHT, 90); recIntersection('R');} else recIntersection('S'); Pause; cas LEFT_TURN :goAndTurn (LEFT, 90); recIntersection('L'); Pause; case FOLLOWING_LINE:followLine(); Pause; } }} Ici, une nouvelle fonction a été introduite :recIntersection (direction). Cette fonction sera utilisée pour stocker l'intersection et aussi pour appeler une autre fonction simplifyPath() , cela réduira le groupe de 3 intersections impliquant un « demi-tour » comme nous l'avons vu précédemment.
void recIntersection(char direction){ path[pathLength] =direction; // Stocke l'intersection dans la variable de chemin. pathLength ++; simplifierPath(); // Simplifie le chemin appris.}
Le CRÉDIT pour le simplifyPath( ) est à Patrick McCabe pour le chemin Solving Code (pour plus de détails, veuillez visiter https://patrickmccabemakes.com) ! La stratégie de simplification de chemin est que chaque fois que nous rencontrons une séquence xBx, nous pouvons la simplifier en supprimant l'impasse. Par exemple, LBL ==> S comme nous l'avons vu sur l'exemple.
void simplifierPath(){ // ne simplifie le chemin que si l'avant-dernier tour était un 'B' if(pathLength <3 || path[pathLength-2] !='B') return; int totalAngle =0; int je; for(i=1;i<=3;i++) { switch(path[pathLength-i]) { case 'R':totalAngle +=90; Pause; cas 'L' :totalAngle +=270 ; Pause; cas 'B' :totalAngle +=180 ; Pause; } } // Récupère l'angle sous la forme d'un nombre compris entre 0 et 360 degrés. TotalAngle =TotalAngle % 360 ; // Remplace tous ces tours par un seul. switch(totalAngle) { case 0:path[pathLength - 3] ='S'; Pause; cas 90 :path[pathLength - 3] ='R' ; Pause; cas 180 :path[pathLength - 3] ='B' ; Pause; cas 270 :path[pathLength - 3] ='L' ; Pause; } // Le chemin est maintenant plus court de deux étapes. pathLength -=2; }
Étape 8 :Deuxième passe :résolvez le labyrinthe le plus rapidement possible !
Le programme principal :loop() c'est simple comme ça :
boucle vide() { ledBlink(1); readLFSsensors(); labyrintheRésoudre(); // Première passe pour résoudre le labyrinthe ledBlink(2); while (digitalRead(buttonPin) { } pathIndex =0; status =0; mazeOptimization(); // Second Pass:exécuter le labyrinthe aussi vite que possible ledBlink(3); while (digitalRead(buttonPin) { } mode =STOPPED; status =0; // 1ère passe pathIndex =0; pathLength =0;}
Ainsi, lorsque le premier passage se termine, nous devons uniquement alimenter le robot avec le réseau de chemins optimisé. Il commencera à courir et lorsqu'une intersection sera trouvée, il définira maintenant ce qu'il faut faire en fonction de ce qu'il est stocké dans path[] .
void mazeOptimization (void){ while (!status) { readLFSsensors(); switch (mode) { case FOLLOWING_LINE:followLine(); Pause; case CONT_LINE :if (pathIndex>=pathLength) mazeEnd (); else {mazeTurn (chemin[cheminIndex]); pathIndex++;} break; case LEFT_TURN :if (pathIndex>=pathLength) mazeEnd (); else {mazeTurn (chemin[cheminIndex]); pathIndex++;} break; case RIGHT_TURN :if (pathIndex>=pathLength) mazeEnd (); else {mazeTurn (chemin[cheminIndex]); pathIndex++;} break; } } } Pour commander quoi faire, une nouvelle fonction mazeTurn(path[]) a été créé. La fonction mazeTurn (chemin[]) sera :
void mazeTurn (char dir) { switch(dir) { case 'L':// Tourner à gauche goAndTurn (LEFT, 90); Pause; case 'R' :// Tourner à droite goAndTurn (RIGHT, 90); Pause; case 'B' :// Revenir en arrière goAndTurn (RIGHT, 800); Pause; case 'S' :// Aller tout droit runExtraInch(); Pause; }} Le deuxième passage est terminé ! La vidéo ci-dessous montre l'exemple complet travaillé ici, premier et deuxième passage. Ci-dessous le code Arduino utilisé sur ce tutoriel :
FV6XNJWINJ45XWM.ino F2FXS8MINJ45XX6.h FX5MHFMINJ45XX7.ino FT2S1WXINJ45XXA.ino F9IC3HQINJ45XXB.ino FU2HRXJINJ45XXV.ino
Étape 9 :Utiliser Android pour le réglage

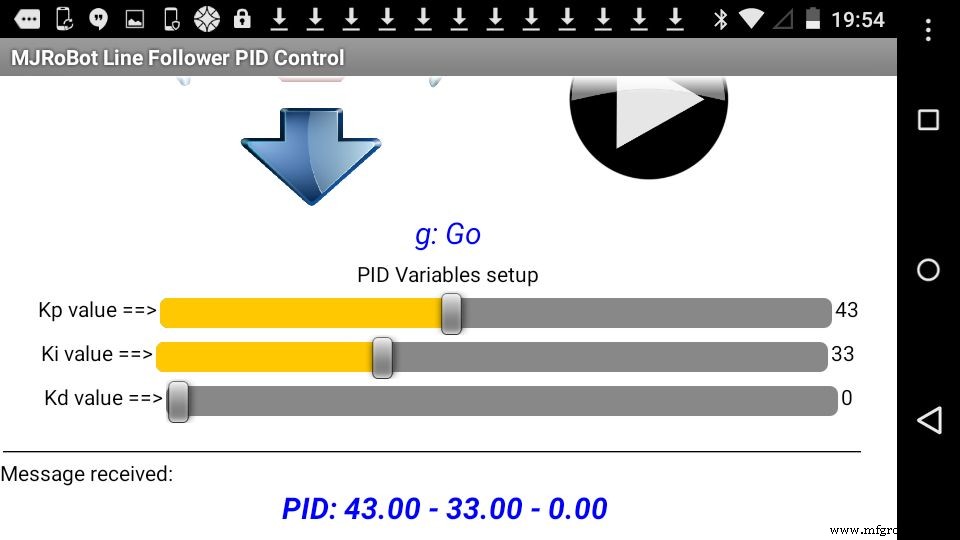
L'application Android développée pour le projet Follow Line peut également être utilisée ici (si vous en avez besoin, l'application Android et son code sont disponibles sur :Line Follower Robot - PID Control - Android Setup. Le code Arduino présenté à la dernière étape inclut déjà la communication avec l'appareil Android. Si vous ne souhaitez pas utiliser l'application Android, pas de problème car le code est "transparent ".
J'ai beaucoup utilisé Android pendant le projet pour envoyer des données de test du robot à l'appareil en utilisant le "Message reçu ". Plusieurs variables doivent être bien définies afin de garantir que le robot tournera le bon angle. Les plus importantes sont ci-dessous (celles marquées en gras je les ai changé plusieurs fois) :
const int adj =0 ; float adjTurn =8;int adjGoAndTurn =800;THRESHOLD =150const int power =250; const int iniMotorPower =250 ; int extraPouce =200 ;
Étape 10 : Conclusion

Il s'agit de la deuxième et dernière partie d'un projet complexe, explorant le potentiel d'un robot suiveur de ligne, où l'Intelligence Artificielle (IA) des concepts simples ont été utilisés pour résoudre un labyrinthe.
Je ne suis pas une IA expert et sur la base de certaines informations que j'ai obtenues du Web, j'ai compris que ce que notre petit Rex, le robot a fait, résoudre le labyrinthe pourrait être considéré comme une application de l'IA. Jetons un œil aux 2 sources ci-dessous :
De Wikipédia :
Ou de cet article universitaire :"Maze Solving Robot Using Freeduino and LSRB Algorithm International Journal of Modern Engineering Research (IJMER)"
Les fichiers mis à jour pour ce projet peuvent être trouvés sur GITHUB. J'espère pouvoir contribuer à ce que d'autres en apprennent davantage sur l'électronique, le robot, Arduino, etc. Pour plus de didacticiels, veuillez visiter mon blog :MJRoBot.org
Salutations du sud du monde !
Merci
Marcelo
Code
- Extrait de code n° 1
- Extrait de code n° 4
- Extrait de code n°5
- Extrait de code n° 6
- Extrait de code n°7
- Extrait de code n°8
- Extrait de code n°12
- Extrait de code 13
- Extrait de code n°14
- Extrait de code n°15
- Extrait de code n°16
- Extrait de code n°17
Extrait de code n°1Texte brut
const int lineFollowSensor0 =12 ; //Utilisation de Digital inputconst int lineFollowSensor1 =18; //Utilisation de la broche analogique A4 comme entrée numériqueconst int lineFollowSensor2 =17 ; //Utilisation de la broche analogique A3 comme entrée numériqueconst int lineFollowSensor3 =16 ; //Utilisation de la broche analogique A2 comme entrée numériqueconst int lineFollowSensor4 =19; //Utilisation de la broche analogique A5 comme entrée numériqueconst int farRightSensorPin =0; //Broche analogique A0const int farLeftSensorPin =1; //Broche analogique A1
Extrait de code n°4Texte brut
LFSensor[0] =digitalRead(lineFollowSensor0);LFSensor[1] =digitalRead(lineFollowSensor1);LFSensor[2] =digitalRead(lineFollowSensor2);LFSensor[3] =digitalRead(lineFollowSensor3);LFSensor[4] =digitalRead( lineFollowSensor4);farRightSensor =analogRead(farRightSensorPin);farLeftSensor =analogRead(farLeftSensorPin);
Extrait de code n°5Texte brut
void testSensorLogic(void) { Serial.print (farLeftSensor); Serial.print (" <==LEFT RIGH==> "); Serial.print (farRightSensor); Serial.print (" mode:"); Serial.print (mode); Serial.print (" erreur:"); Serial.println (erreur);} Extrait de code n°6Texte brut
boucle vide(){ readLFSsensors(); switch (mode) { case NO_LINE:motorStop(); allerEtTourner (GAUCHE, 180); Pause; case CONT_LINE :runExtraInch(); readLFSsensors(); if (mode ==CONT_LINE) mazeEnd(); sinon goAndTurn (GAUCHE, 90); // ou c'est un "T" ou une "Croix"). Dans les deux cas, va à la pause GAUCHE ; cas RIGHT_TURN:runExtraInch(); readLFSsensors(); if (mode ==NO_LINE) goAndTurn (RIGHT, 90); Pause; cas LEFT_TURN :goAndTurn (LEFT, 90); Pause; case FOLLOWING_LINE:followLine(); Pause; }} Extrait de code n°7Texte brut
void runExtraInch(void){ motorPIDcontrol(); retard (extraPouce); arrêt moteur();} Extrait de code n°8Texte brut
void goAndTurn(int direction, int degrees){ motorPIDcontrol(); delay(adjGoAndTurn); motorTurn(direction, degrees);} Extrait de code n°12Texte brut
void mazeSolve(void){ while (!status) { readLFSsensors(); switch (mode) { case NO_LINE:motorStop(); goAndTurn (LEFT, 180); recIntersection('B'); Pause; case CONT_LINE:runExtraInch(); readLFSsensors(); if (mode !=CONT_LINE) {goAndTurn (LEFT, 90); recIntersection('L');} // or it is a "T" or "Cross"). In both cases, goes to LEFT else mazeEnd(); Pause; case RIGHT_TURN:runExtraInch(); readLFSsensors(); if (mode ==NO_LINE) {goAndTurn (RIGHT, 90); recIntersection('R');} else recIntersection('S'); Pause; case LEFT_TURN:goAndTurn (LEFT, 90); recIntersection('L'); Pause; case FOLLOWING_LINE:followingLine(); Pause; } }} Code snippet #13Plain text
void recIntersection(char direction){ path[pathLength] =direction; // Store the intersection in the path variable. pathLength ++; simplifyPath(); // Simplify the learned path.} Code snippet #14Plain text
void simplifyPath(){ // only simplify the path if the second-to-last turn was a 'B' if(pathLength <3 || path[pathLength-2] !='B') return; int totalAngle =0; int je; for(i=1;i<=3;i++) { switch(path[pathLength-i]) { case 'R':totalAngle +=90; Pause; case 'L':totalAngle +=270; Pause; case 'B':totalAngle +=180; Pause; } } // Get the angle as a number between 0 and 360 degrees. totalAngle =totalAngle % 360; // Replace all of those turns with a single one. switch(totalAngle) { case 0:path[pathLength - 3] ='S'; Pause; case 90:path[pathLength - 3] ='R'; Pause; case 180:path[pathLength - 3] ='B'; Pause; case 270:path[pathLength - 3] ='L'; Pause; } // The path is now two steps shorter. pathLength -=2; } Code snippet #15Plain text
void loop() { ledBlink(1); readLFSsensors(); mazeSolve(); // First pass to solve the maze ledBlink(2); while (digitalRead(buttonPin) { } pathIndex =0; status =0; mazeOptimization(); // Second Pass:run the maze as fast as possible ledBlink(3); while (digitalRead(buttonPin) { } mode =STOPPED; status =0; // 1st pass pathIndex =0; pathLength =0;} Code snippet #16Plain text
void mazeOptimization (void){ while (!status) { readLFSsensors(); switch (mode) { case FOLLOWING_LINE:followingLine(); Pause; case CONT_LINE:if (pathIndex>=pathLength) mazeEnd (); else {mazeTurn (path[pathIndex]); pathIndex++;} break; case LEFT_TURN:if (pathIndex>=pathLength) mazeEnd (); else {mazeTurn (path[pathIndex]); pathIndex++;} break; case RIGHT_TURN:if (pathIndex>=pathLength) mazeEnd (); else {mazeTurn (path[pathIndex]); pathIndex++;} break; } } } Code snippet #17Plain text
void mazeTurn (char dir) { switch(dir) { case 'L':// Turn Left goAndTurn (LEFT, 90); Pause; case 'R':// Turn Right goAndTurn (RIGHT, 90); Pause; case 'B':// Turn Back goAndTurn (RIGHT, 800); Pause; case 'S':// Go Straight runExtraInch(); Pause; }} Github
https://github.com/Mjrovai/MJRoBot-Maze-Solverhttps://github.com/Mjrovai/MJRoBot-Maze-SolverSchémas
z7IdLkxL1J66qOtphxqC.fzzProcessus de fabrication
- Robot utilisant Raspberry Pi &Bridge Shield
- Robot à commande gestuelle utilisant Raspberry Pi
- Robot contrôlé par Wi-Fi utilisant Raspberry Pi
- DÉTECTION HUMAINE DU ROBOT SONBI À L'AIDE DE KINECT ET DE RASPBERRY PI
- Bosch ajoute l'intelligence artificielle à l'industrie 4.0
- L'intelligence artificielle est-elle une fiction ou une mode ?
- L'intelligence artificielle reçoit un énorme coup de pouce Kubernetes
- L'intelligence artificielle aide le robot à reconnaître les objets au toucher
- Utiliser l'intelligence artificielle pour suivre la déforestation