


Boulon Robot Contrôlé voiture
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | 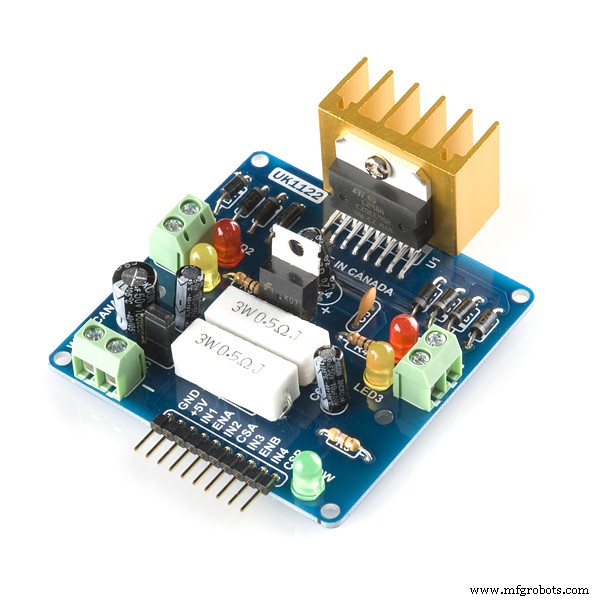 |
| × | 1 |
 |
| × | 1 |
| × | 1 |
| × | 1 |
| × | 1 |
Applications et services en ligne
 |
| |||
 |
|
À propos de ce projet
Avertissement:
Aucune électronique n'a été endommagée lors de la réalisation de ce projet.
Acte un :un beau jour...
Nous travaillions depuis le matin et nous avions beaucoup de documentation et de tests de code entre nos mains et nous avions désespérément besoin d'une pause, mais jouer au baby-foot n'était pas idéal car cela nous expulserait de la zone. Donc, pour maintenir notre sang-froid, nous avons commencé à penser à ce que nous pourrions faire cela nous détendre mais serait toujours nous garder dans cette « zone de travail ». C'est quand notre gestionnaire a suggéré:« Pourquoi ne faites-vous pas un petit projet et le mettre sur Hackster? ». Eh bien bon appel Pranav.
Nous avons donc décidé de créer un robot RC -wait-for-it- contrôlé par Internet avec un tout petit bonus (que nous révélerons plus tard car le suspense est important).

Bien que nous avons été pompés et nous nous sommes précipités à l'interne magasin de matériel.
Act Two:La forêt de matériel
Nous arrivons à la quincaillerie, elle est remplie de kits et de composants qui font briller vos yeux de cupidité, vos mains seront tirées vers elles et avant de vous en rendre compte, vous souderez des pièces pour faire une calculatrice 8 bits mais, nous étions concentrés et ne pas laisser ces distractions nous contraignent et nous avons saisi ce que nous avions besoin (donc vous devriez)
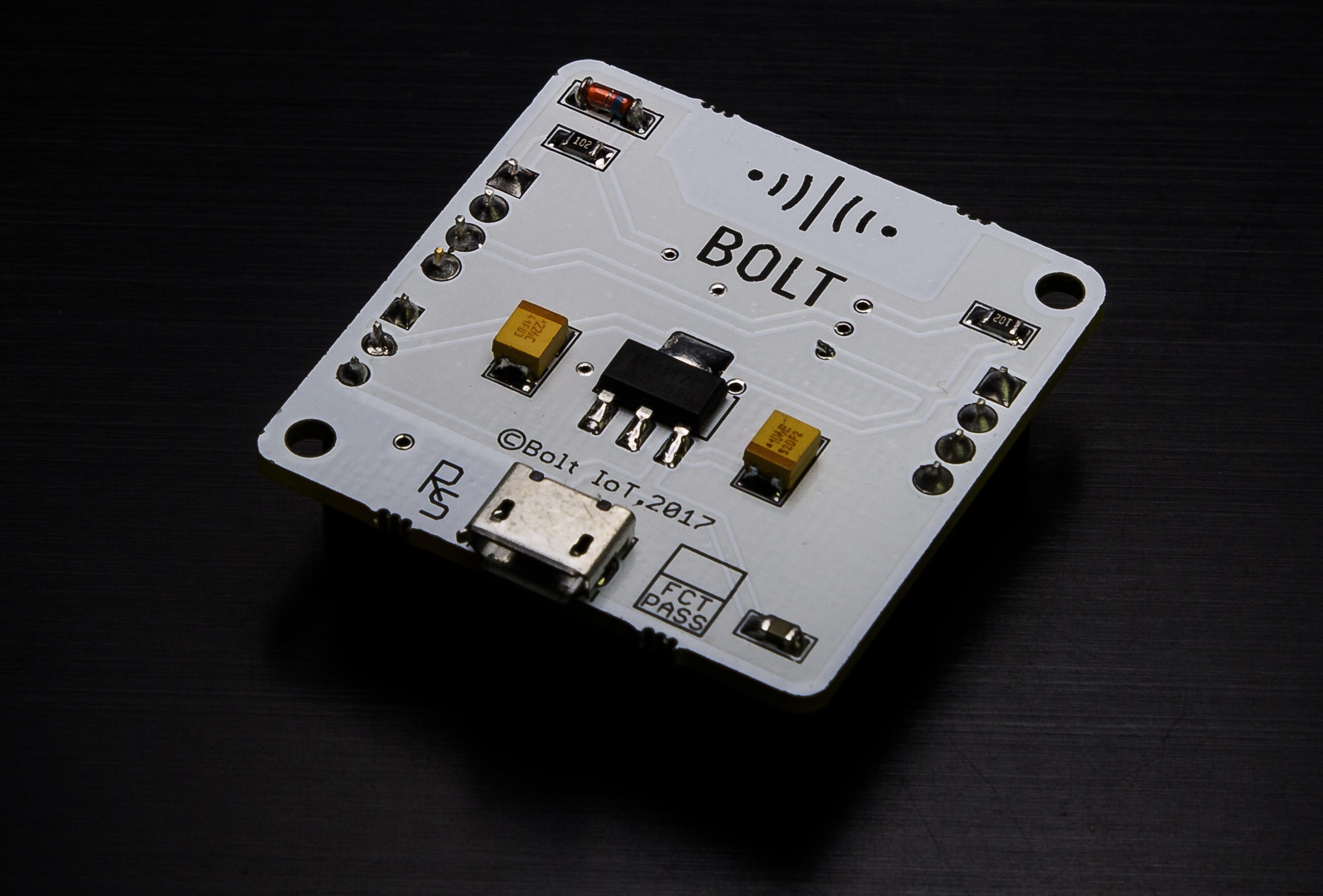
1. Boulon Module Wifi

2. Kit robotique de base

3. Arduino UNO ou Boltduino


4. bouclier pilote L298N moteur

5. Capteur de proximité

6. Les fils du cavalier

7. Adaptateur secteur

Acte 3 :Forger
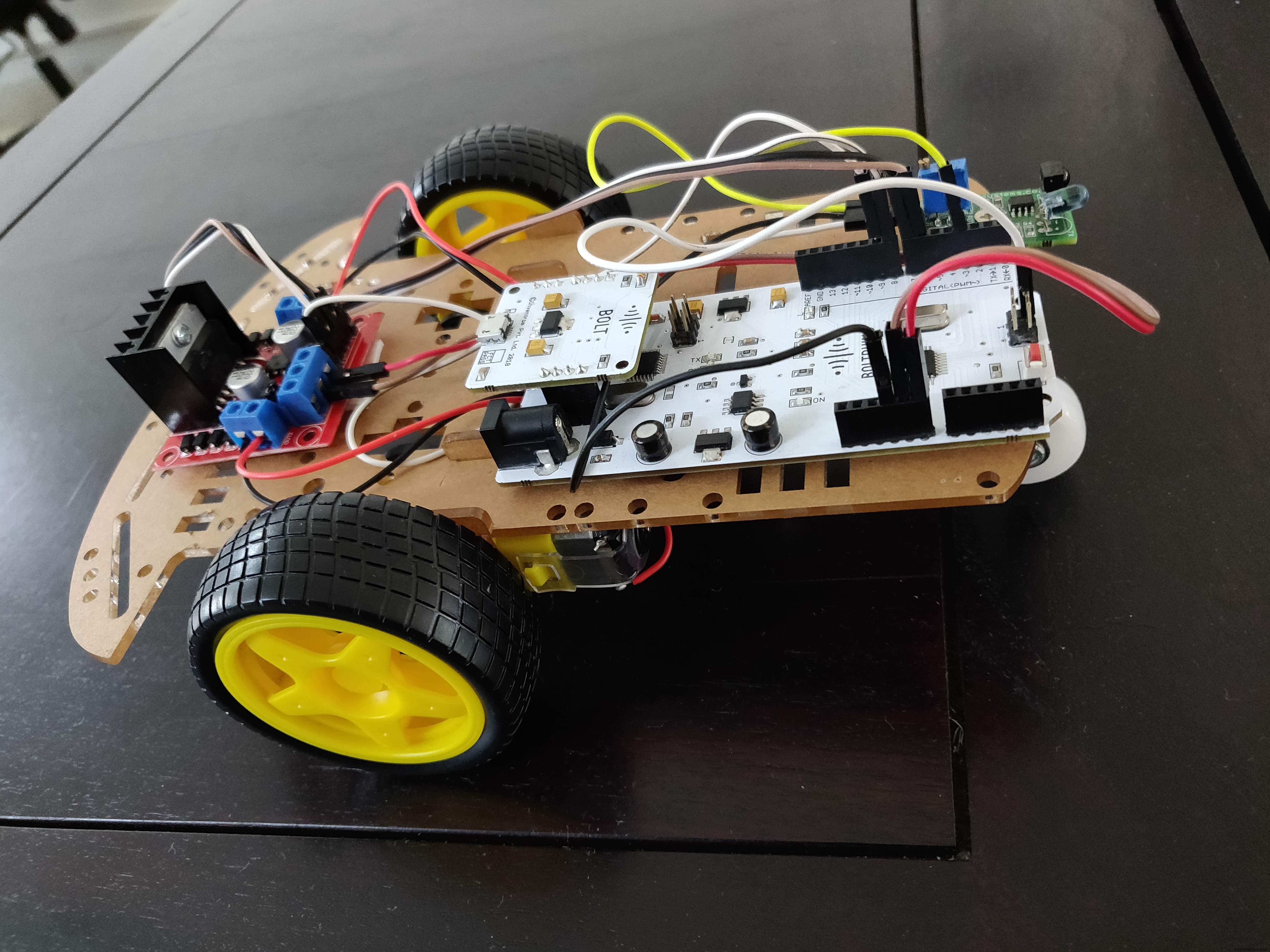
Nous sommes arrivés sains et saufs de la forêt de matériel avec toutes les pièces dont nous avions besoin. Il était temps pour Devashish le généralissime de Hardwarey pour travailler sa magie et mis en place ce petit robot.

Voici comment il a fait cela.
Montage du matériel
1. Fixer la roue de la roulette dans la partie médiane avant du châssis, comme illustré.
2. Monter le châssis de la voiture robotisée et fixer les deux moteurs à courant continu en utilisant les écrous et les boulons ainsi que les roues fournies comme indiqué.
. REMARQUE:à souder les fils à la borne de moteur avant de le fixer sur le châssis
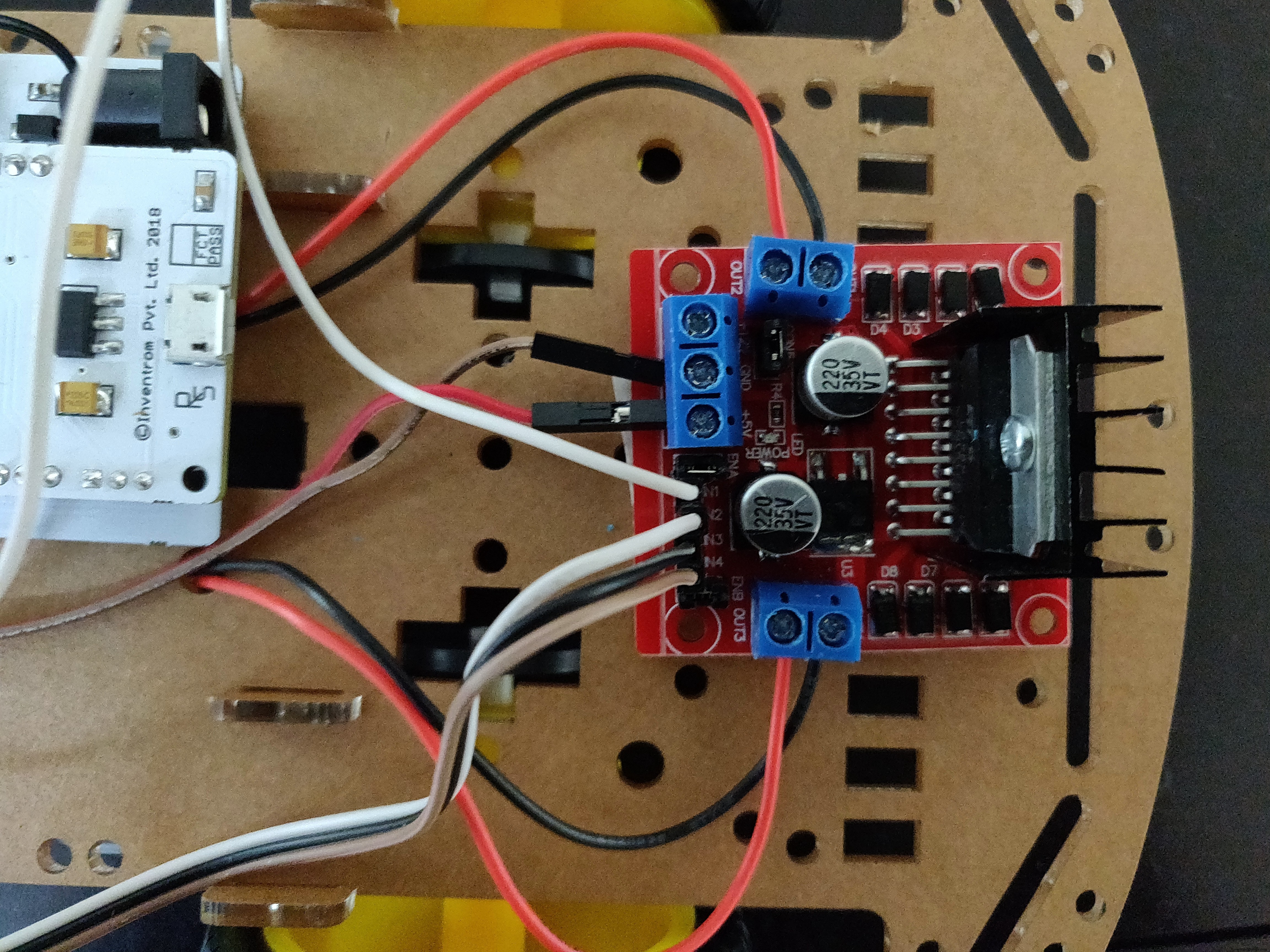
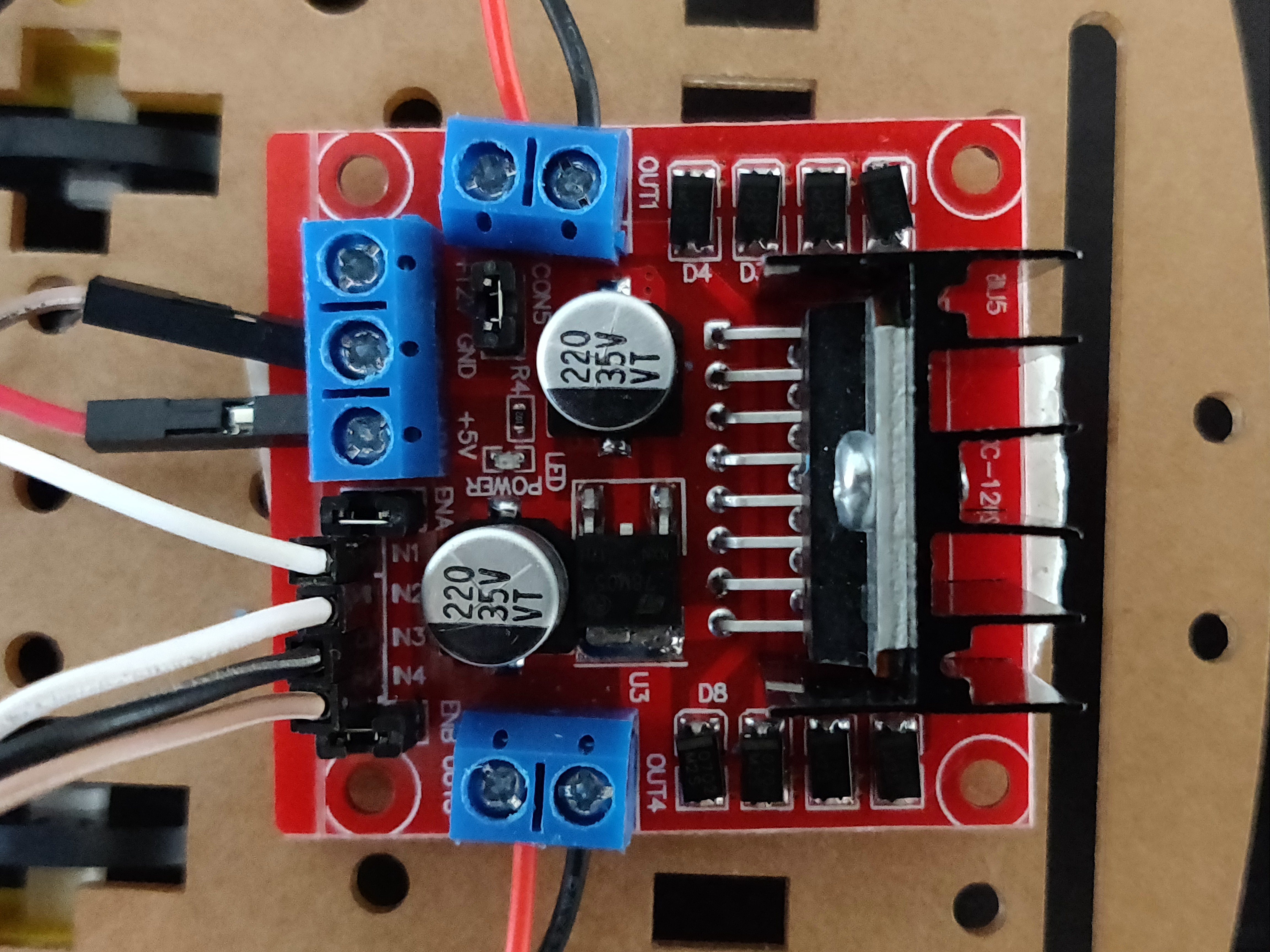
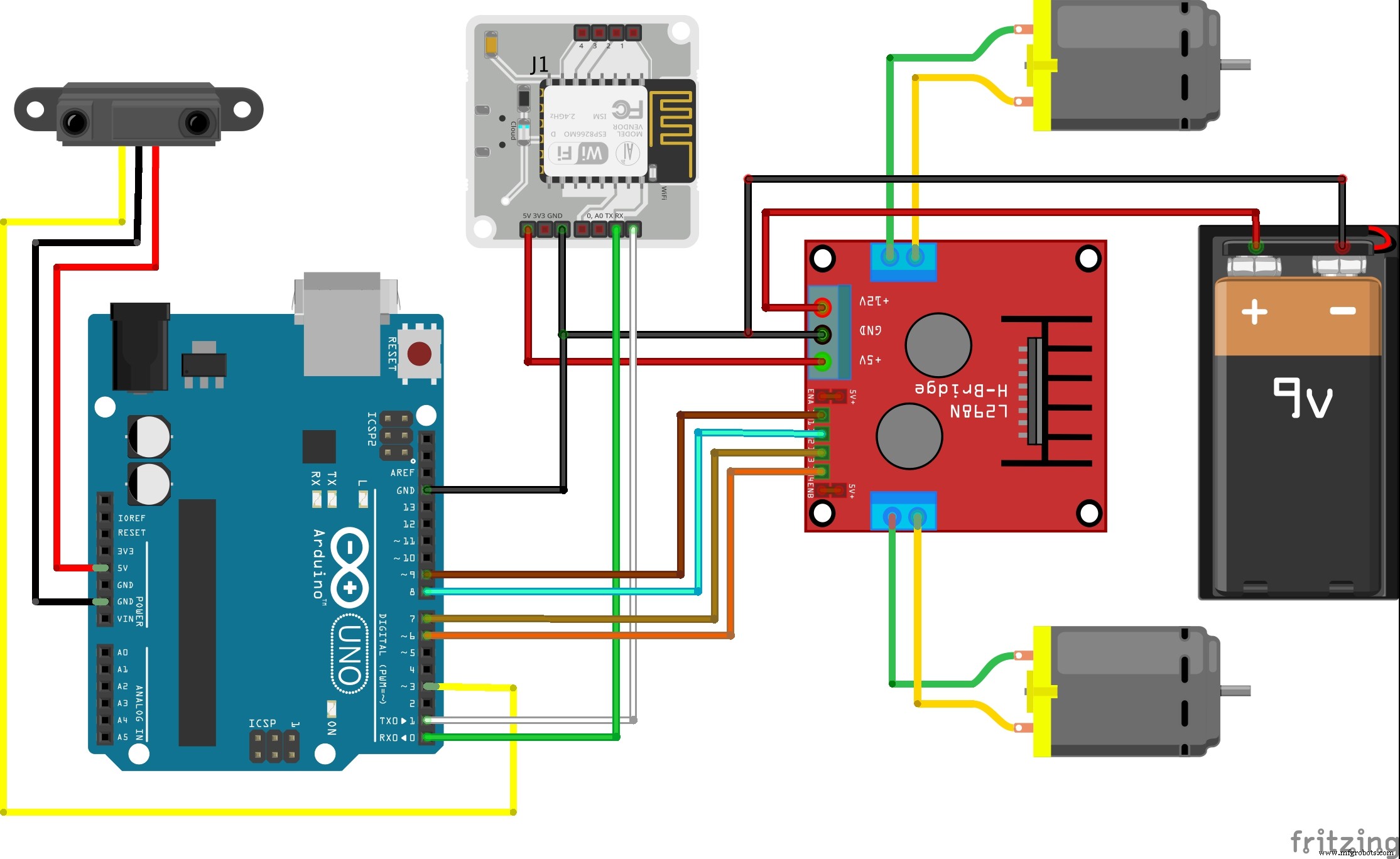
3. Maintenant, connecter les bornes du moteur au module de commande de moteur L298N comme indiqué ci-dessous.
Remarque:connecter le terminal du moteur sur le même côté du module pilote.
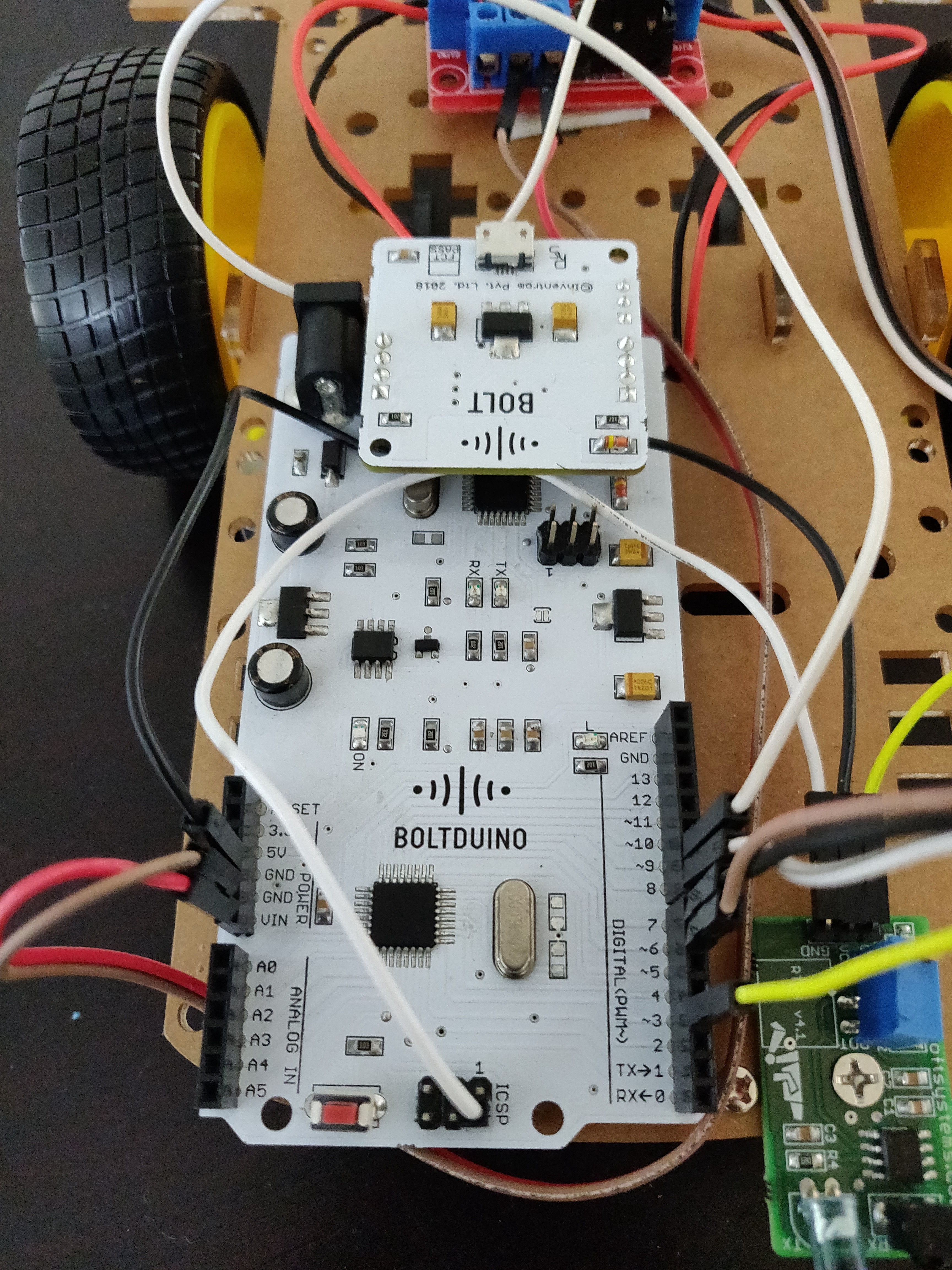
4. Branchez la broche 5 V et GND du module pilote à 5 V et GND de Arduino respectivement.
5. Connectez les broches 5V, GND, Tx et Rx de Bolt aux broches 5V, GND, Rx et Tx d'Arduino respectivement. Pour Boltduino, fixez le boulon dans la présente fente.
6. Raccorder les quatre bornes d'entrée (IN1, IN2, IN3, IN4) aux broches 6, 7, 8 et 9 respectivement.
7. Raccordement du 5V, GND et OUT du capteur de proximité à des broches 5V, GND et 3 du Arduino respectivement.


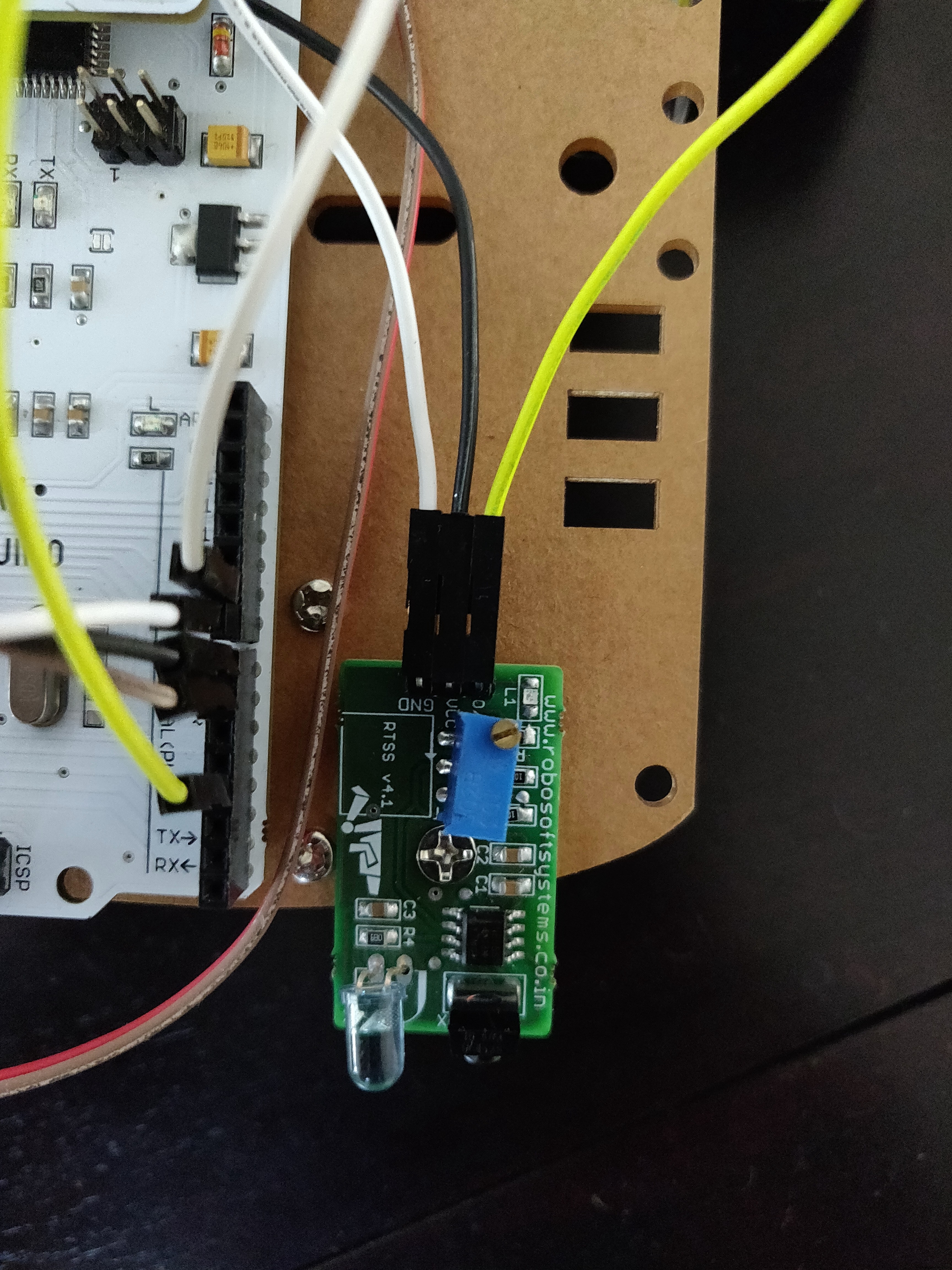
REMARQUE :Pour tout aidez-vous davantage à regarder les schémas ci-dessous.
Connecter Bolt au cloud
Après le montage du matériel, inscrivez-vous et connectez le boulon au boulon Cloud. En savoir plus sur l'enregistrement et la connexion de Bolt au cloud.
Acte quatre :Et puis il y avait la connectivité
Maintenant, le généralissime de Hardwarey envoyé pour l'assassin de Kiln du Code (i.e. moi).
Il a été chargé d'apporter ce robot à la vie avec son code et se connecter au Cloud. Suivez ses traces pour obtenir votre robot de travail aussi bien.
Étape 1 : Get le code .
Obtenir le code du référentiel Github de ce projet. Télécharger le fichier de a.zip ou clone à votre système, ce que jamais vous convient le mieux.
Étape 2 Travail code.
Il y a deux parties de code :
- Un dossier nommé app
- Dans ce dossier, il y a deux fichiers i. contrôleur.html ii. controller.js. Nous en reparlerons plus tard.
- Ensuite, il y a le firmware de votre Arduino dans un fichier nommé Bolt_Robot_Car.ino . Ce sera flashé / téléchargé sur votre Arduino.
Étape 3 : Paramètre up Arduino.
Une fois que vous avez terminé de configurer votre matériel et de connecter votre boulon au cloud, téléchargez le firmware présent dans le fichier Bolt_Robot_Car.ino à votre Arduino. Pour savoir comment configurer Arduino IDE et télécharger un code pour Arduino cliquez sur ce lien.
Étape 4: Le Contrôleur App.
Double-cliquez sur controller.html fichier et vous devriez être présenté avec la page Web suivante.
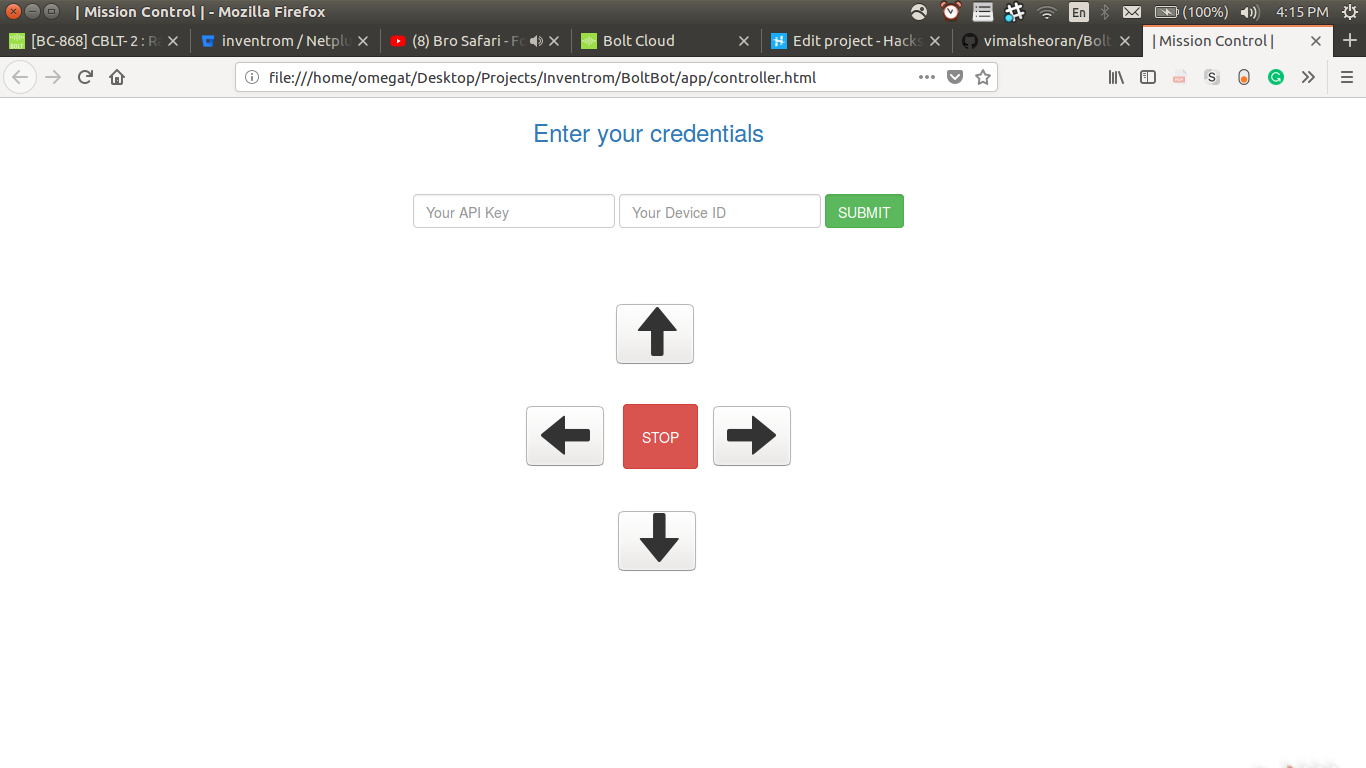
Entrez maintenant votre clé API et ID de l'appareil dans leurs champs respectifs et appuyez sur ENVOYER. Vous pouvez obtenir votre clé API et ID de l'appareil depuis votre tableau de bord Bolt Cloud.
Après cela, vous pouvez utiliser les boutons de commande pour contrôler le mouvement de votre robot. Le bouton presse déclenchement spécifiques fonctions JavaScript (fichier de contrôle controller.js ) pour envoyer des commandes au Bolt Cloud puis à votre Bolt WiFi Module. Maintenant, vous avez un bot RC, faites ce que vous voulez avec. Il peut y avoir plusieurs choses avec cela, vous pouvez joindre quelques capteurs ou de le rendre automatique ou tout ce que vous souhaitez. Et si vous gâcher ne vous inquiétez pas, nous les indigènes du Créateur terre sont ici pour vous aider à tout moment.
Acte Cinq : Eggufs de Pâques
Je sais que certains d'entre vous pourraient penser « Hé, vous avez dit qu'il y avait une caractéristique de bonus, où est-il? » ne vous inquiétez pas, nous n'allons pas vous laisser planer mais il y a de fortes chances que vous ayez déjà remarqué la fonctionnalité dans ActThree:Forging si ce n'est pas le cas, revoyez-le. Mais, eh bien, qui a ce genre de temps alors TL;DR votre robot s'arrêtera automatiquement s'il rencontre un obstacle ou un blocage sur son chemin afin que vous ne finissiez pas par le fracasser contre le mur. D'accord qui est la fin de cette histoire, jetez un oeil à cette vidéo à la caisse le tutoriel vidéo pour ce projet.
Démo:
Code
BoltBot
https://github.com/vimalsheoran/BoltBotSchémas
Processus de fabrication
- Principaux composants d'une voiture et leurs fonctions
- Robot Raspberry Pi contrôlé par Bluetooth
- Robot à commande gestuelle utilisant Raspberry Pi
- ROBOT WIFI RASPBERRY PI CONTRLÉ À PARTIR D'UN SMARTPHONE ANDROID
- Windows 10 IoT Core :Robot à commande vocale
- Robot contrôlé par Wi-Fi utilisant Raspberry Pi
- ROObockey :robot de hockey de rue télécommandé et assisté
- Voiture RC contrôlée par joystick
- Robot à commande vocale