


Voiture contrôlée par Bluetooth
Composants et fournitures
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Bonjour !
Tout ce qui peut être contrôlé est génial. N'est-ce pas ? Nous, les humains, aimons contrôler les choses et c'est pourquoi l'automatisation et la robotique sont si fascinantes.
Ce tutoriel vous apprendra comment créer votre propre voiture contrôlée par Bluetooth. Alors commençons.
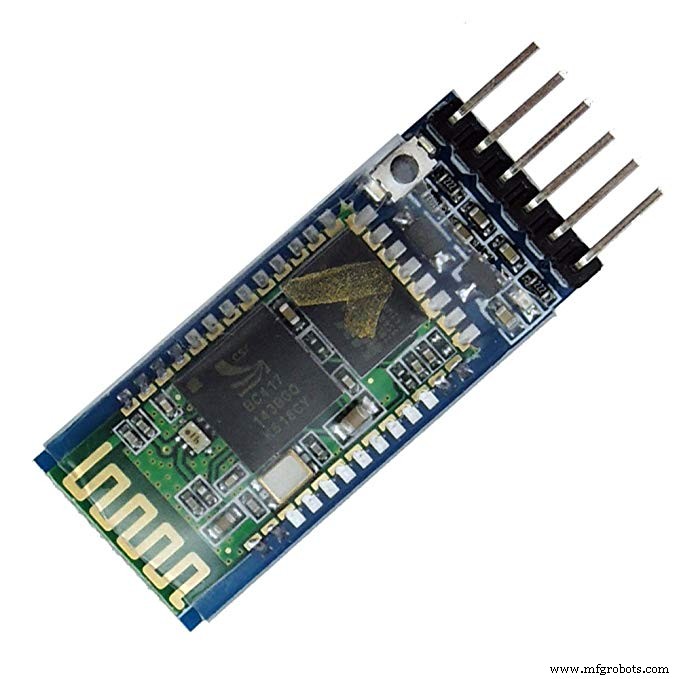
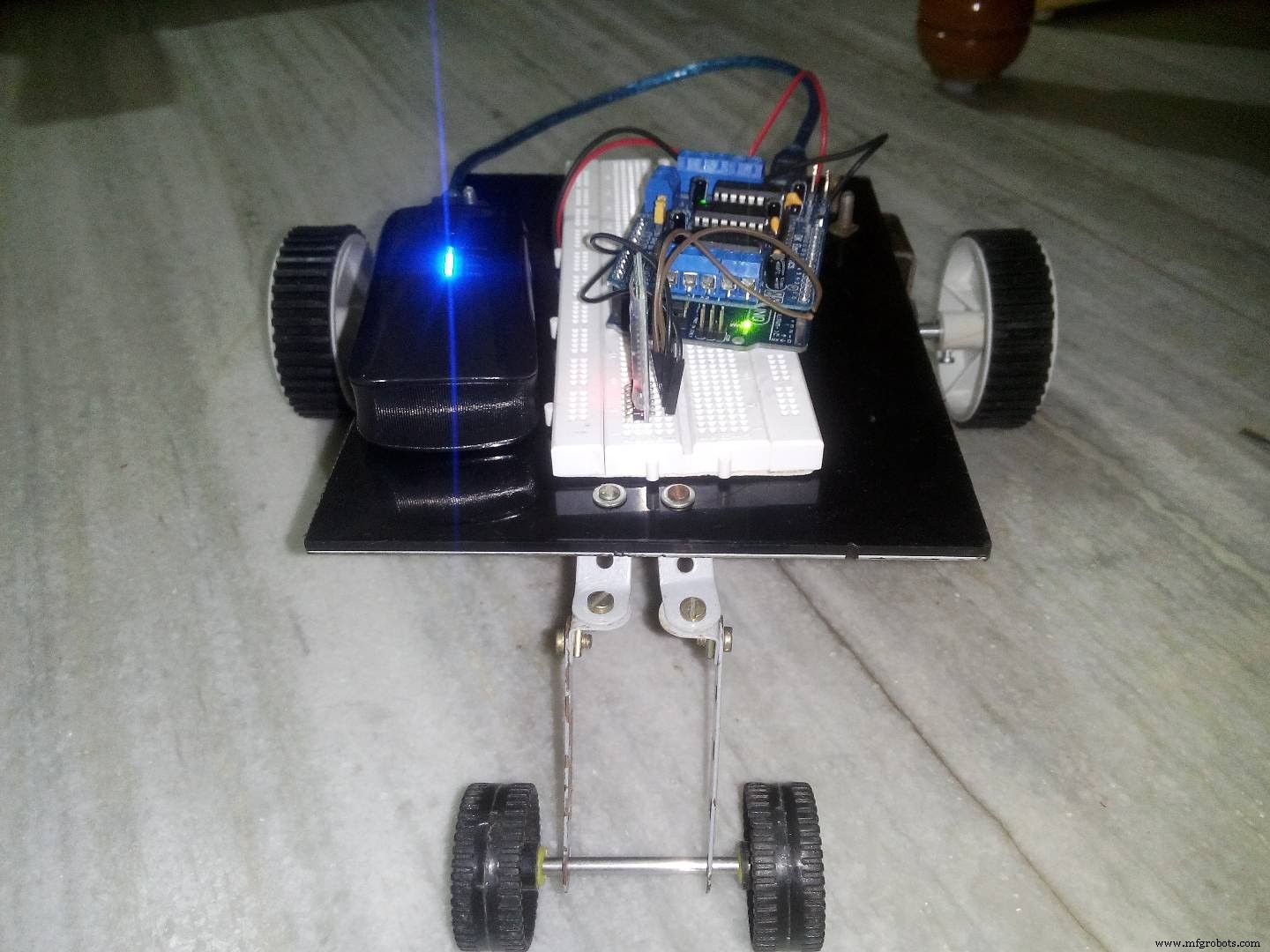
Ce sera une voiture contrôlée par Bluetooth, donc pour ce projet, nous utiliserons le module Bluetooth HC-05 pour recevoir les paquets de données de contrôle.
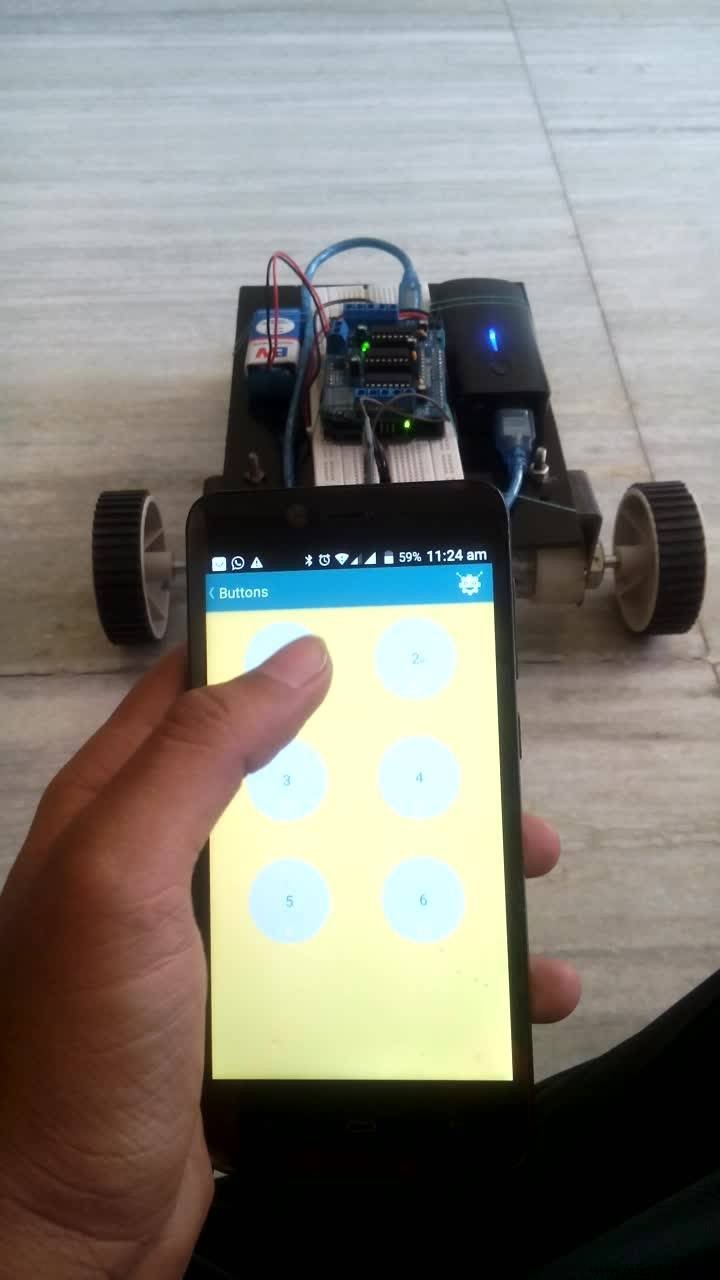
Nous aurons également besoin d'une application Android qui enverra les paquets de données de contrôle au module Bluetooth. Nous utiliserons une application tierce (cliquez ici pour télécharger) à cette fin.
- -> D'accord les gars ! Construisons le matériel.
- -> Carrosserie de la voiture.
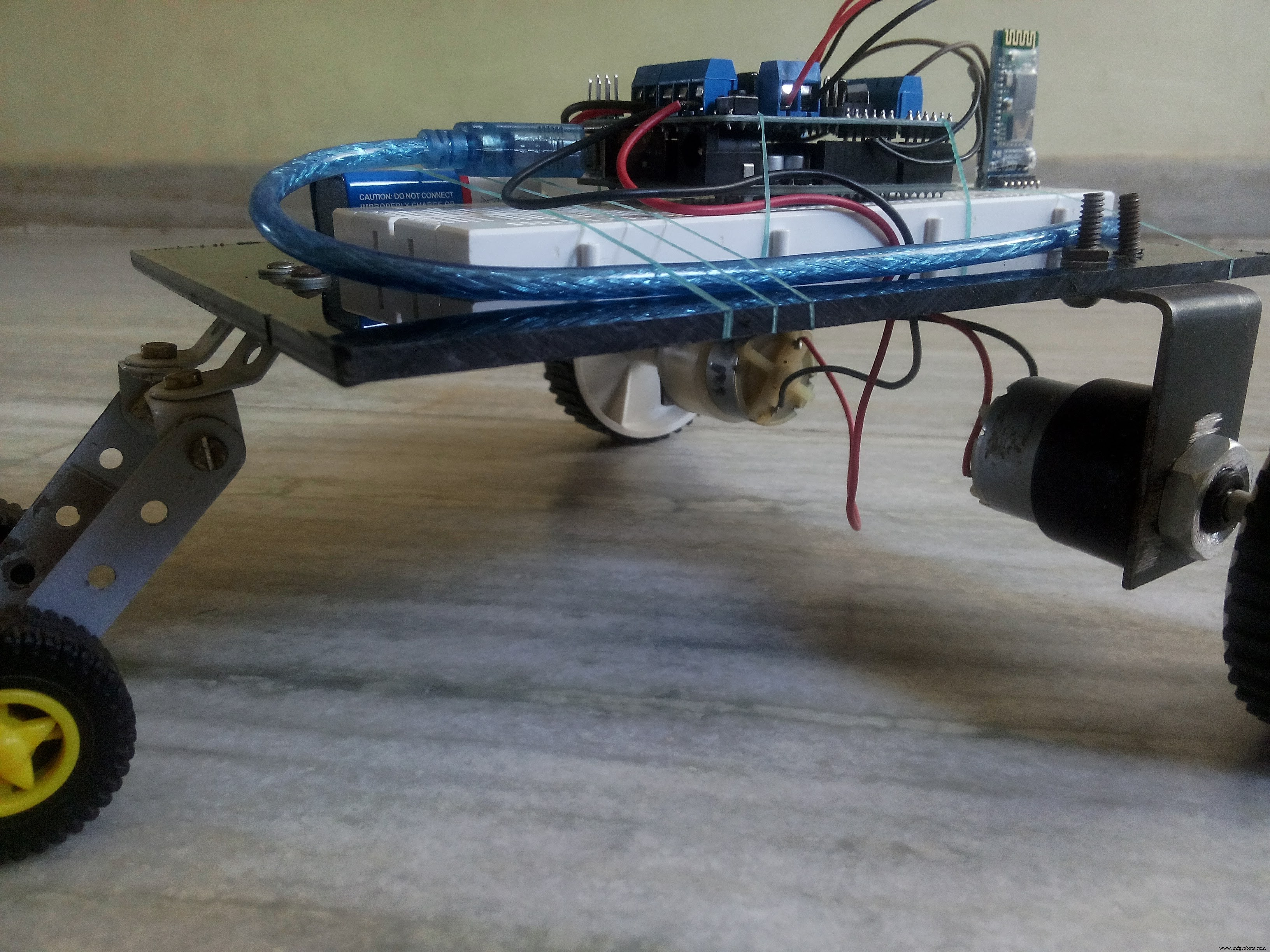
La voiture que nous construisons pour ce projet sera une voiture à double moteur. J'ai utilisé deux moteurs à courant continu 12 v 200 tr/min. Vous pouvez utiliser un châssis prêt à l'emploi. J'ai utilisé une feuille de PVC comme châssis.
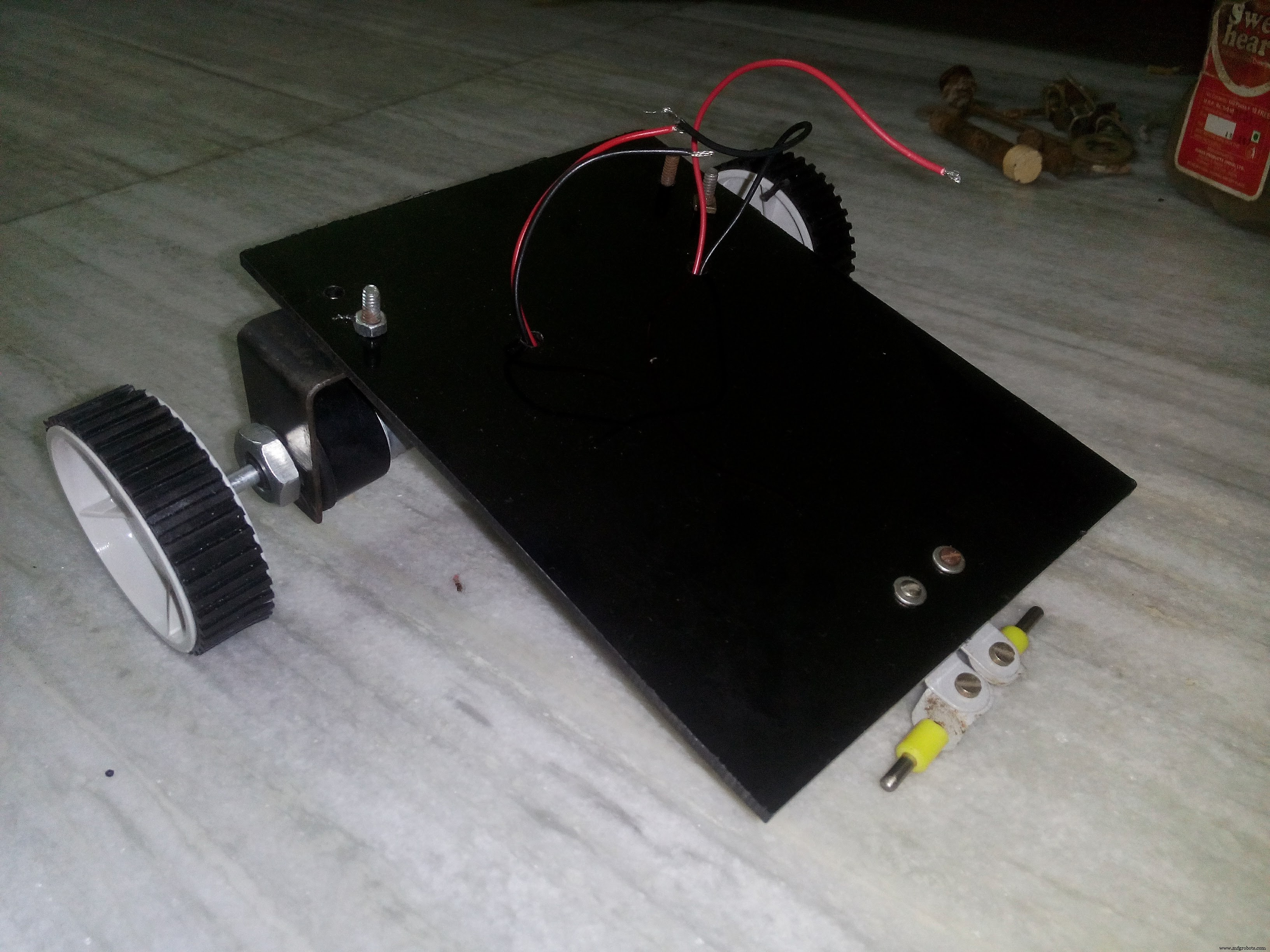
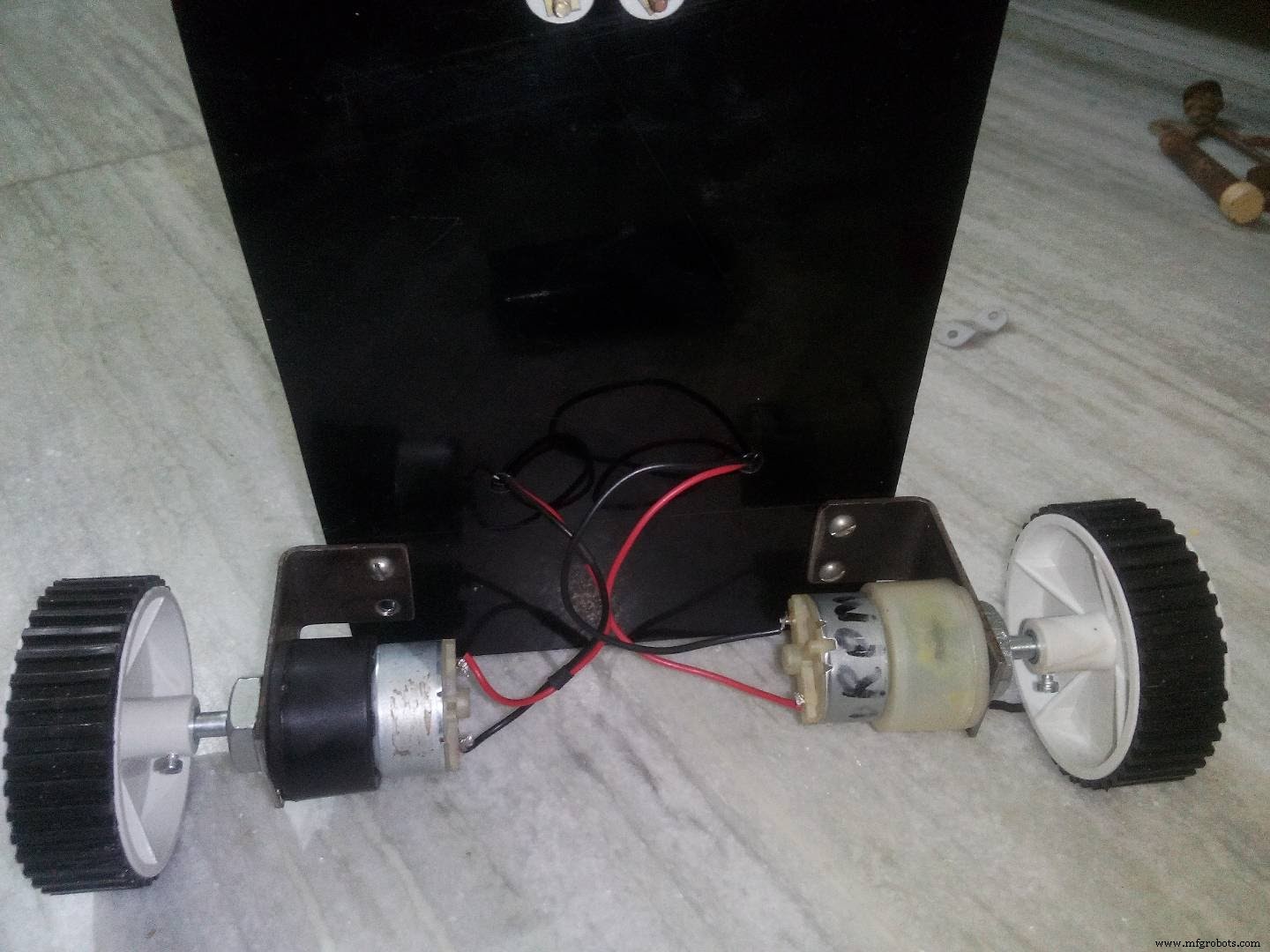
Ainsi, la structure de base de notre voiture est prête. Vous pouvez utiliser cette conception ou développer votre propre conception, mais n'oubliez pas de maintenir le poids aussi bas que possible car il s'agit d'une conception à deux moteurs.
--> Circuit
Construisons maintenant le circuit
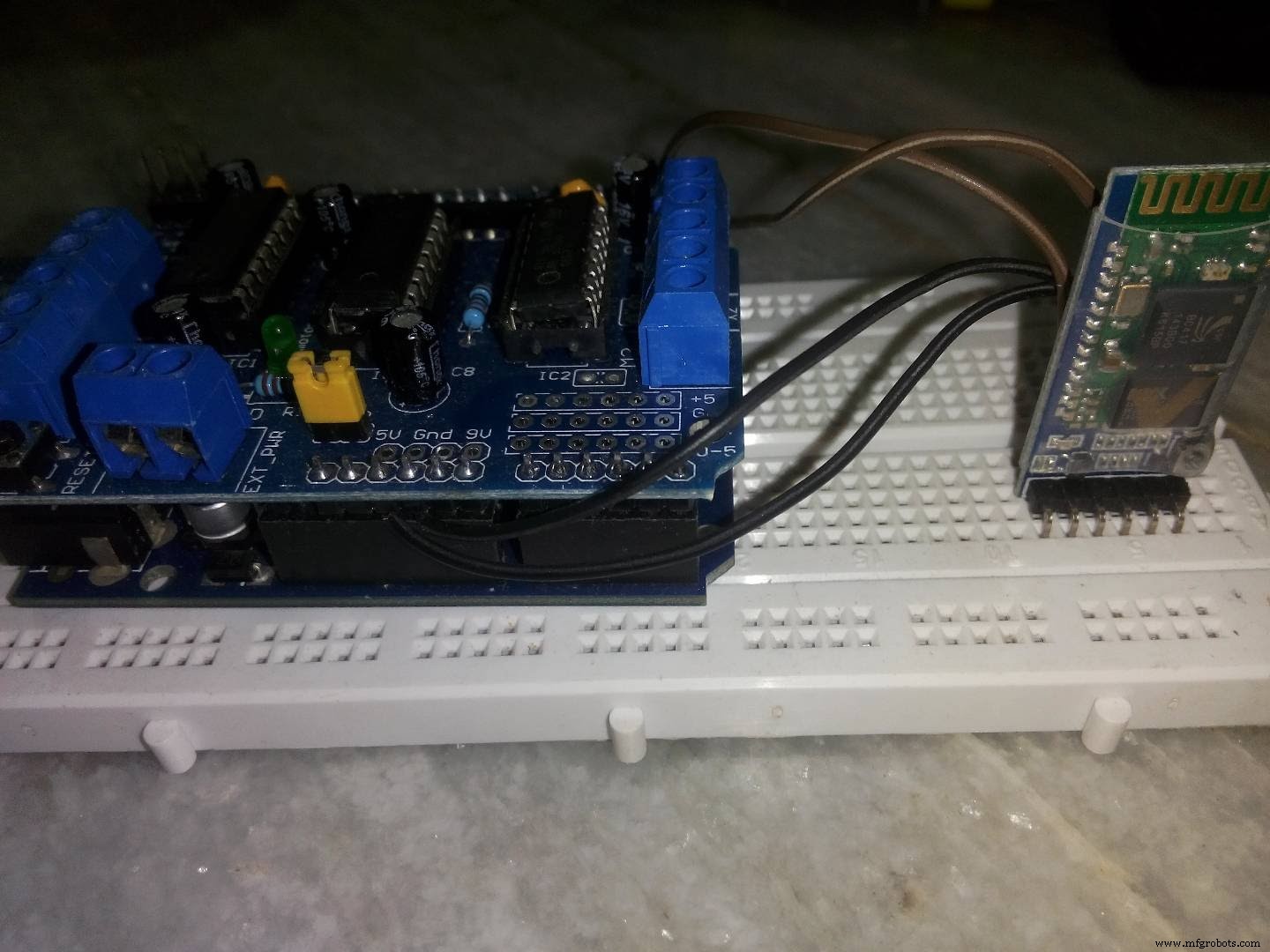
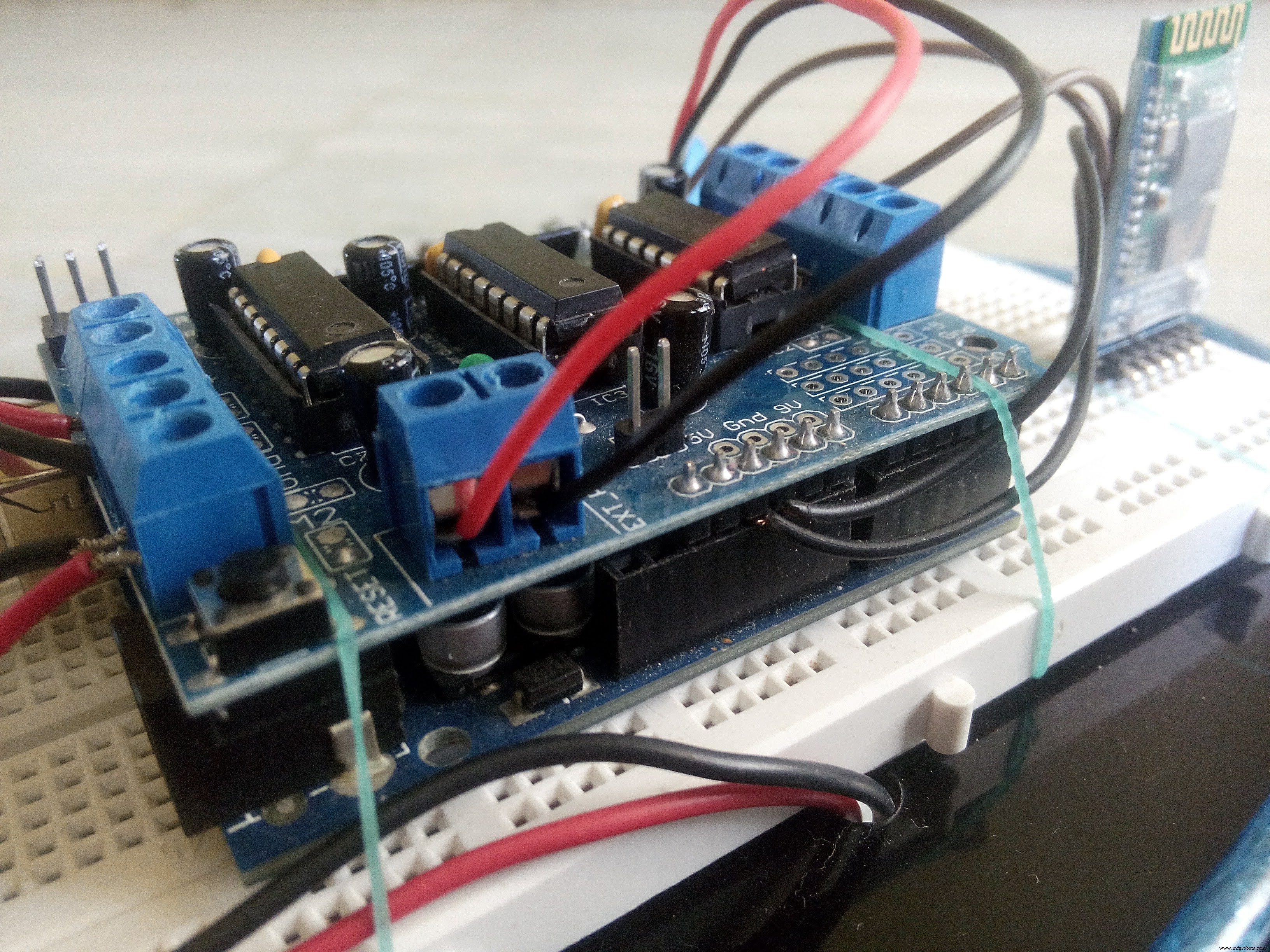
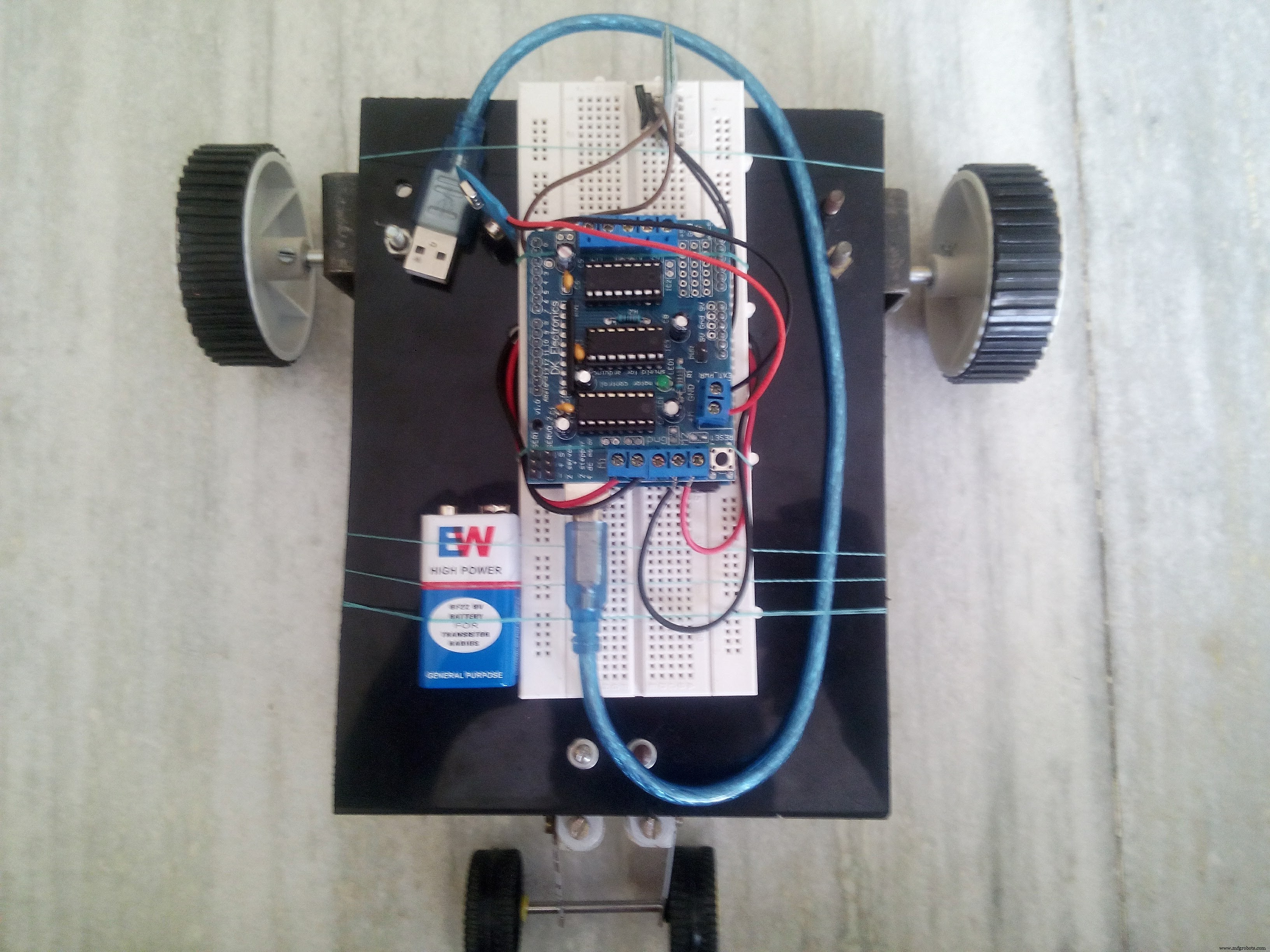
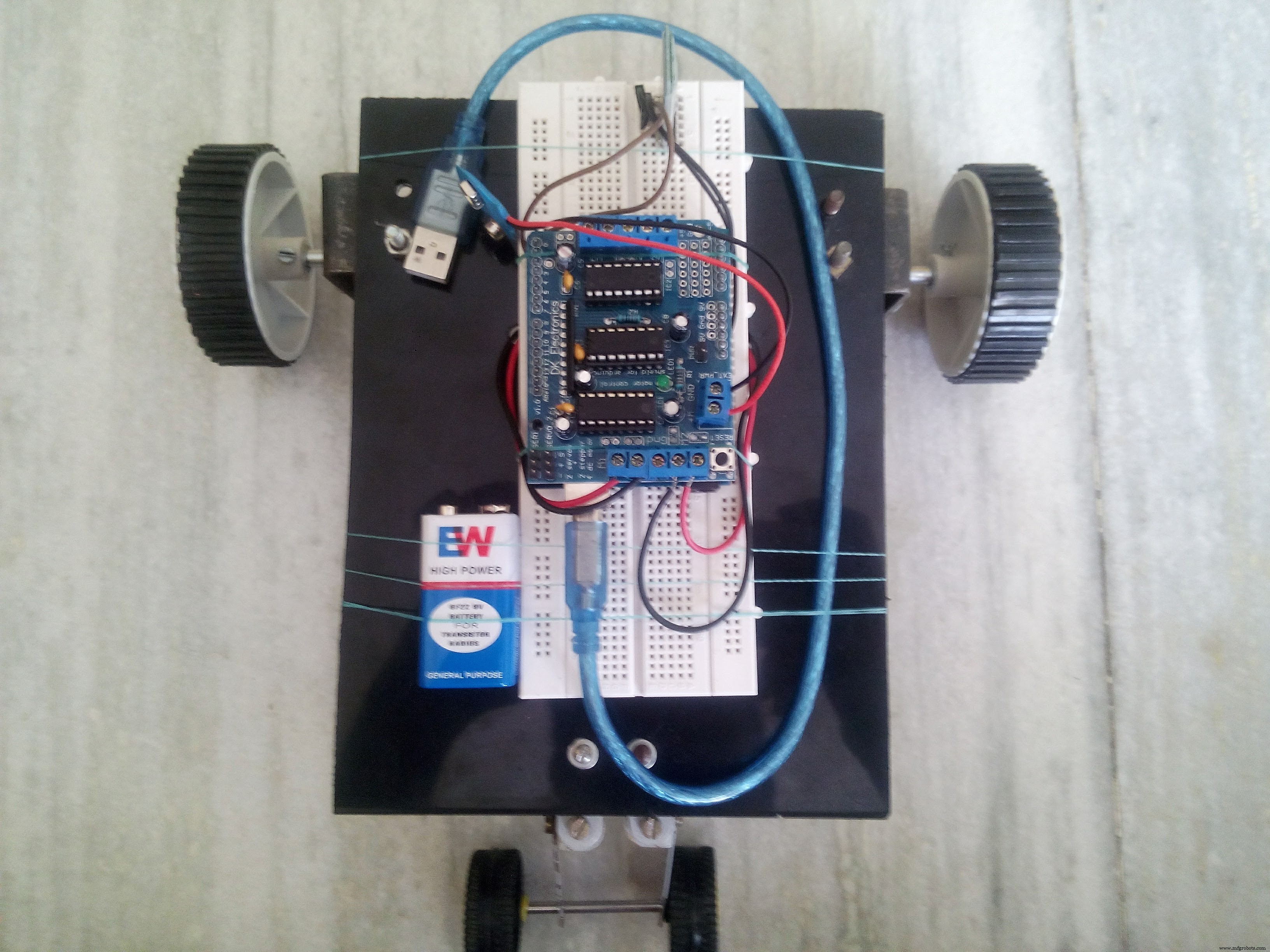
Suivez le schéma pour faire les connexions. Voici à quoi il ressemblera une fois toutes les connexions établies.
--> Alimentation
Maintenant, c'est un peu crucial.
Pour alimenter l'Arduino Uno, une banque d'alimentation avec une tension de sortie de 5 V est utilisée. Ce n'est pas suffisant pour piloter ces moteurs 12v cc. Nous avons donc besoin d'une source d'alimentation supplémentaire.
J'ai utilisé deux piles 9v en série pour obtenir une alimentation 18v. Le problème majeur ici était qu'ici une bonne quantité de courant était également nécessaire.
Mes batteries n'étaient pas en mesure de fournir suffisamment de courant et les performances de cette voiture n'étaient donc pas satisfaisantes à 100%. Il fonctionnait mais les moteurs tournaient à très basse vitesse.
Je recommande donc d'utiliser une batterie 12v, sinon vous devrez faire des compromis avec la vitesse.
-->Code
Ici, nous allons utiliser le sens de rotation des moteurs pour contrôler la direction de la voiture.
Avant - Les deux moteurs se déplacent vers l'avant
Vers l'arrière - Les deux moteurs se déplacent vers l'arrière
Gauche - Le moteur gauche se déplace vers l'arrière et le moteur droit se déplace vers l'avant
Droite - Le moteur gauche avance et le moteur droit recule
Arrêt - Les deux moteurs s'arrêtent
void forward(){ motor1.run(FORWARD); motor2.run(FORWARD);}void back(){ motor1.run(BACKWARD); motor2.run(BACKWARD);}void left(){ motor1.run(BACKWARD); motor2.run(FORWARD);}void right(){ motor1.run(FORWARD); motor2.run(BACKWARD);}void Stop(){ motor1.run(RELEASE); motor2.run(RELEASE);}
------------------------------------------------------------ ----------------------------------------------------
C'était donc ça !
1. Téléchargez simplement le code sur l'Arduino.
2. Effectuez les connexions.
3. Lancez l'application.
4. Connectez votre téléphone à la voiture.
Voici notre BEAUTÉ terminée !

J'espère que ce tutoriel a été assez bon pour vous aider à démarrer. Si vous avez des suggestions de modifications ou d'ajouts supplémentaires à ce projet, veuillez me le faire savoir dans la section des commentaires.
Code
- Le code
Le codeC/C++
Ce code doit être téléchargé sur Arduino Uno#includeAF_DCMotor motor1 (1) ; //motor1 est le moteur gaucheAF_DCMotor motor2(2) ; //motor2 est le bon motorint val;void setup(){ Serial.begin(9600); motor1.setSpeed(255); //la vitesse du moteur est définie motor2.setSpeed(255); Stop();}void loop() { bt=Serial.read();if(val=='1') //lorsque le module bluetooth reçoit 1 la voiture avance{ forward(); }if(val=='2') //lorsque le module bluetooth reçoit 2, la voiture recule{back(); }if(val=='3') //lorsque le module bluetooth reçoit 3, la voiture se déplace vers la gauche{ left(); }if(val=='4') //lorsque le module bluetooth reçoit 4 la voiture se déplace à droite{ right(); }if(val=='5') //lorsque le module bluetooth reçoit 5, la voiture s'arrête{ Stop(); }}void forward(){ motor1.run(FORWARD); motor2.run(FORWARD);}void back(){ motor1.run(BACKWARD); motor2.run(BACKWARD);}void left(){ motor1.run(BACKWARD); motor2.run(FORWARD);}void right(){ motor1.run(FORWARD); motor2.run(BACKWARD);}void Stop(){ motor1.run(RELEASE); motor2.run(RELEASE);}
Schémas
Ce sont les connexions. Connectez la source d'alimentation 12 V au blindage du pilote du moteur. Veuillez noter que le schéma n'inclut pas la source d'alimentation externe.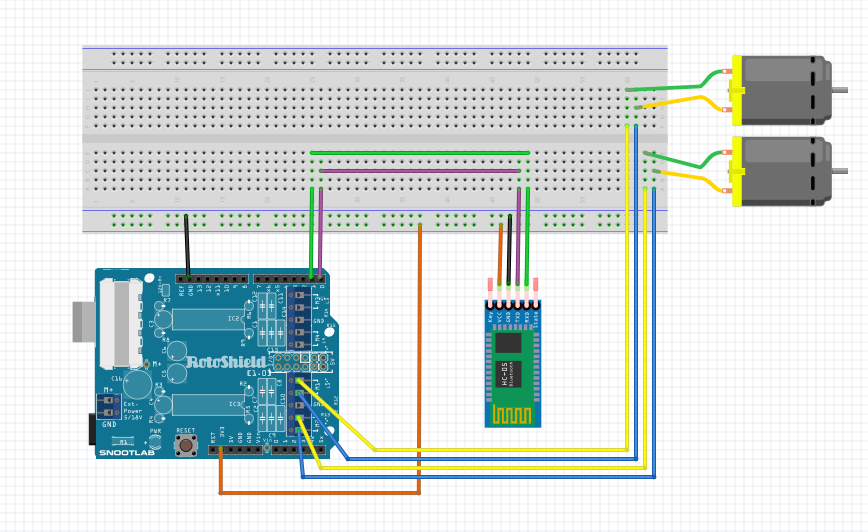
Processus de fabrication
- Robot Raspberry Pi contrôlé par Bluetooth
- Transformez votre voiture RC en voiture RC Bluetooth
- Voiture RC contrôlée par joystick
- Arduino avec Bluetooth pour contrôler une LED !
- Calculatrice UNO simple
- Robot à commande vocale
- Persistance de la vision
- Appareils Bluetooth à commande vocale avec OK Google
- Wi-Servo :Servomoteurs Wi-Fi contrôlés par navigateur