


Robot à commande vocale
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
Outils et machines nécessaires
 |
|
Applications et services en ligne
 |
|
À propos de ce projet
Les robots sont cool. Avoir un robot qui peut se déplacer en écoutant vos commandes vocales est plus cool. Faire un tel robot à commande vocale ou vocale avec Arduino est de plus en plus cool. Parce que les Arduino sont bon marché et faciles à modifier.
Commençons à faire, vous pouvez également regarder le didacticiel vidéo.
Étape 1 : pièces nécessaires
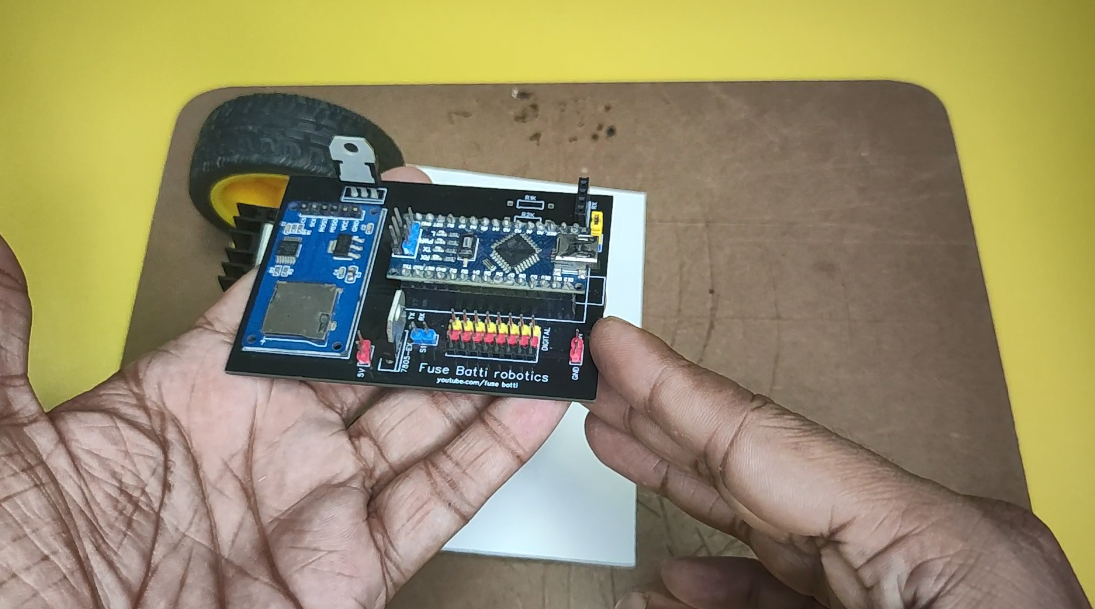
Le robot est basé sur PCB. Un PCB que j'ai conçu pour être utilisé dans différents robots. Voyons quels autres composants j'ai utilisés -
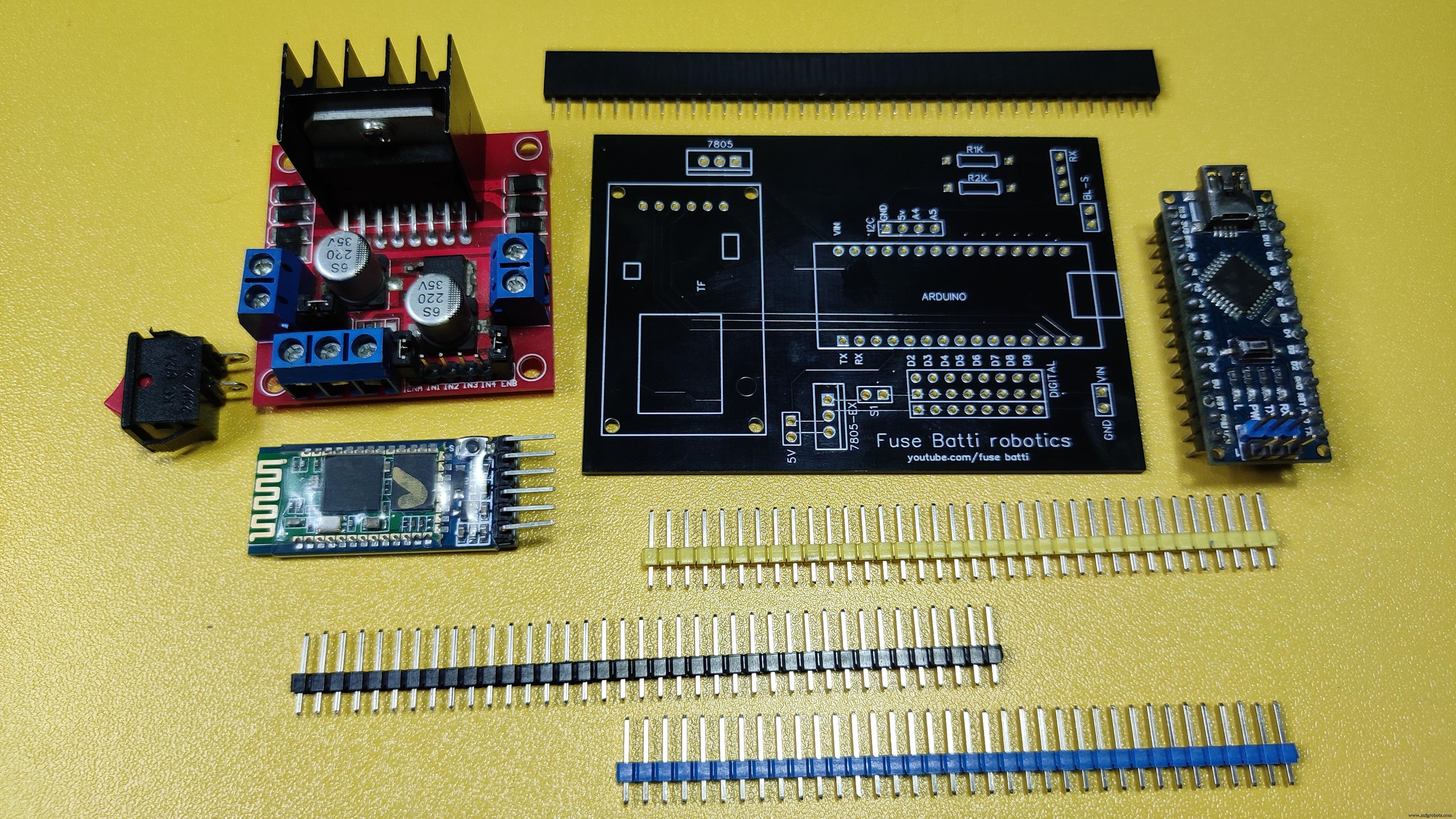
Électronique :
- Arduino Nano - 1x
- Module de commande de moteur L298n - 1x
- Module Bluetooth Hc05 - 1x
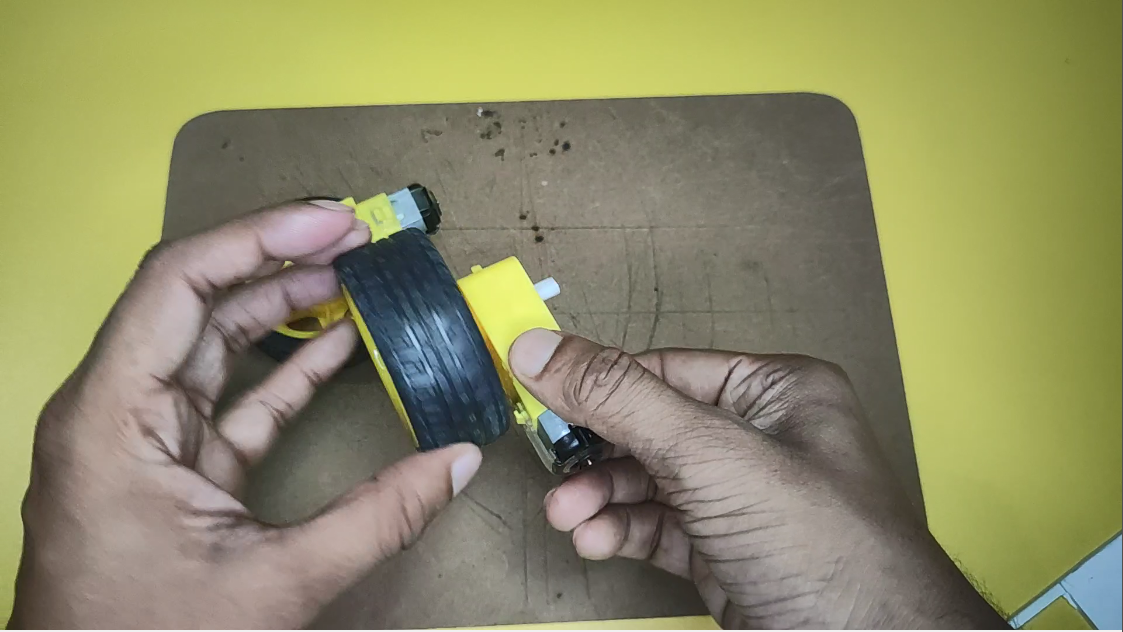
- Moteur à courant continu et roue compatible - 2x
- Robot PCB multifonctionnel - 1x (lien)
- Certains en-têtes masculins et féminins
Pour faire du corps :
- Feuille PVC
- Pistolet à colle chaude
Logiciel :
- Arduino.ide
- Une application que j'ai créée
Ça y est, maintenant nous sommes prêts à partir.
Étape 2 : Principe :Comment cela fonctionnera-t-il ?
Il est toujours bon de bien comprendre ce que vous allez faire avant de commencer à tout gâcher. Peut-être que vous ne plaisantez pas, mais moi si.
Ainsi, Arduino est un mini-ordinateur ou disons, un microcontrôleur. Il n'a pas assez de puissance ou de capacité pour effectuer la reconnaissance vocale (pour l'instant). Mais heureusement pour moi, ma carte PCB a un port pour connecter le module Bluetooth. Cela signifie que je peux connecter notre Arduino sans fil à d'autres appareils. Et je profite de ce truc. Je devrai donc créer une application Android capable d'effectuer l'opération "Speech to Text" à l'aide de l'API Google (nécessite Internet) et après avoir reçu le texte, elle commandera Arduino via Bluetooth.
Donc, si je dis « En avant », le robot obtiendra « F » et avancera. C'est le concept. Maintenant, allons-y.
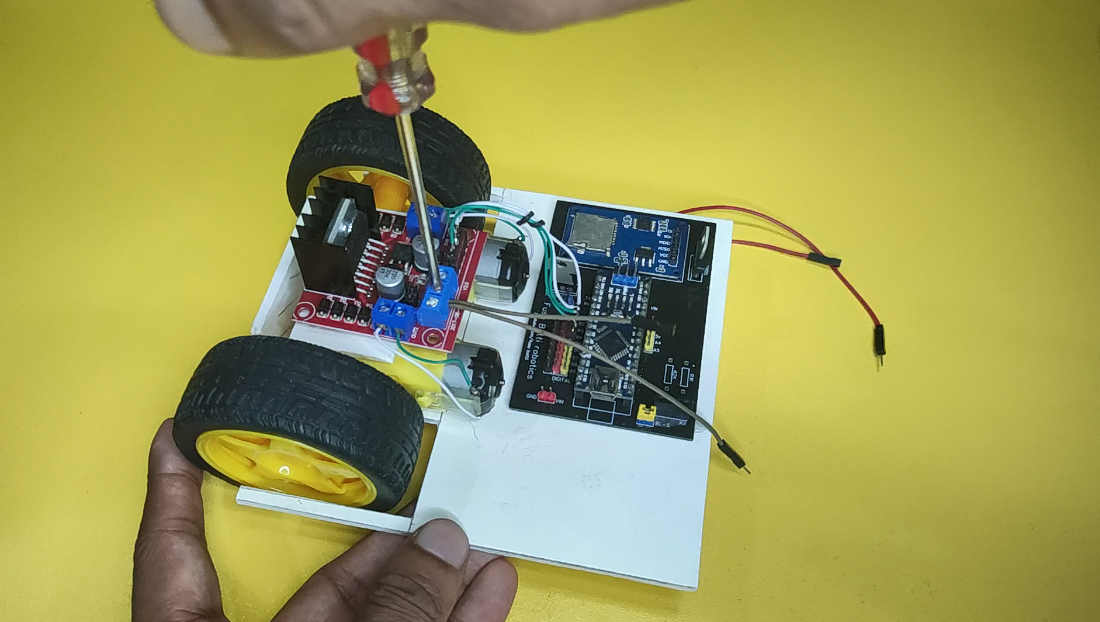
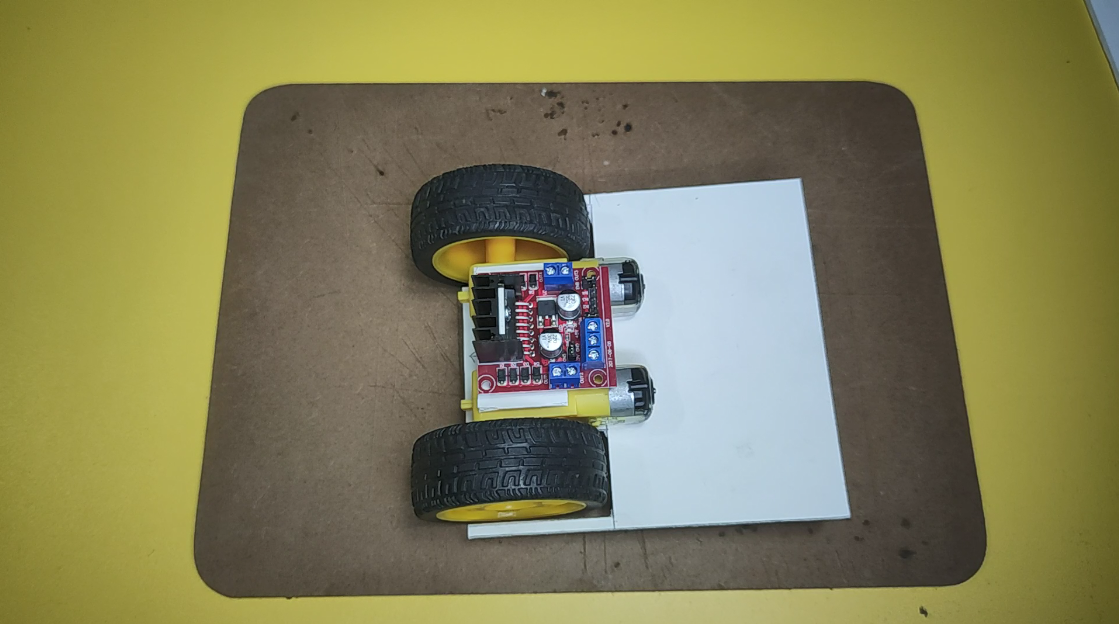
Étape 3 :Faites le corps
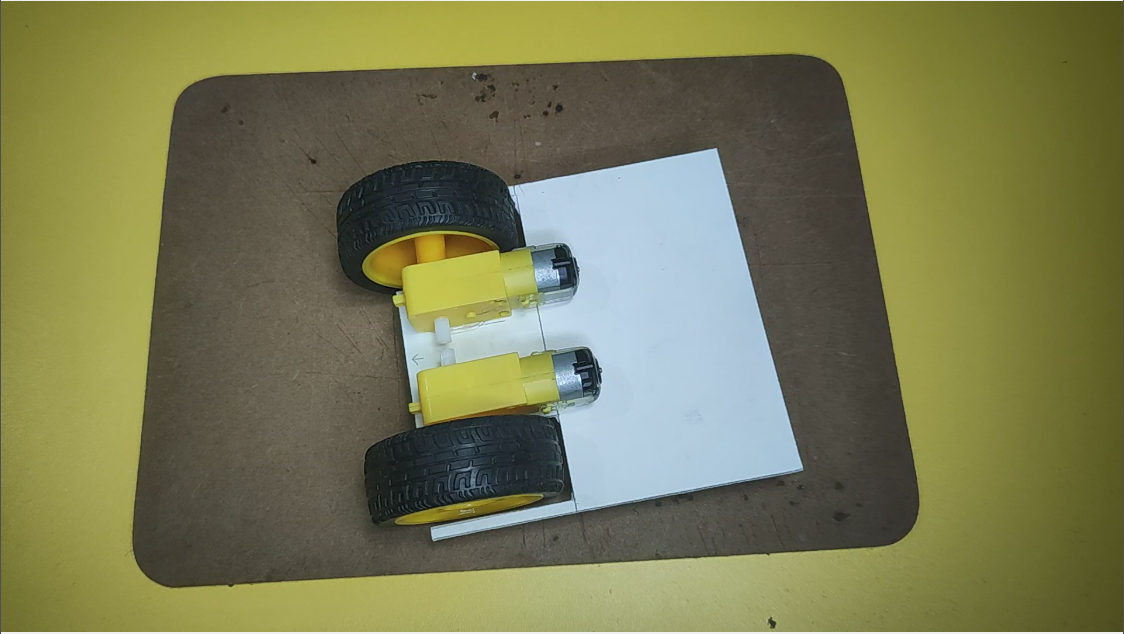
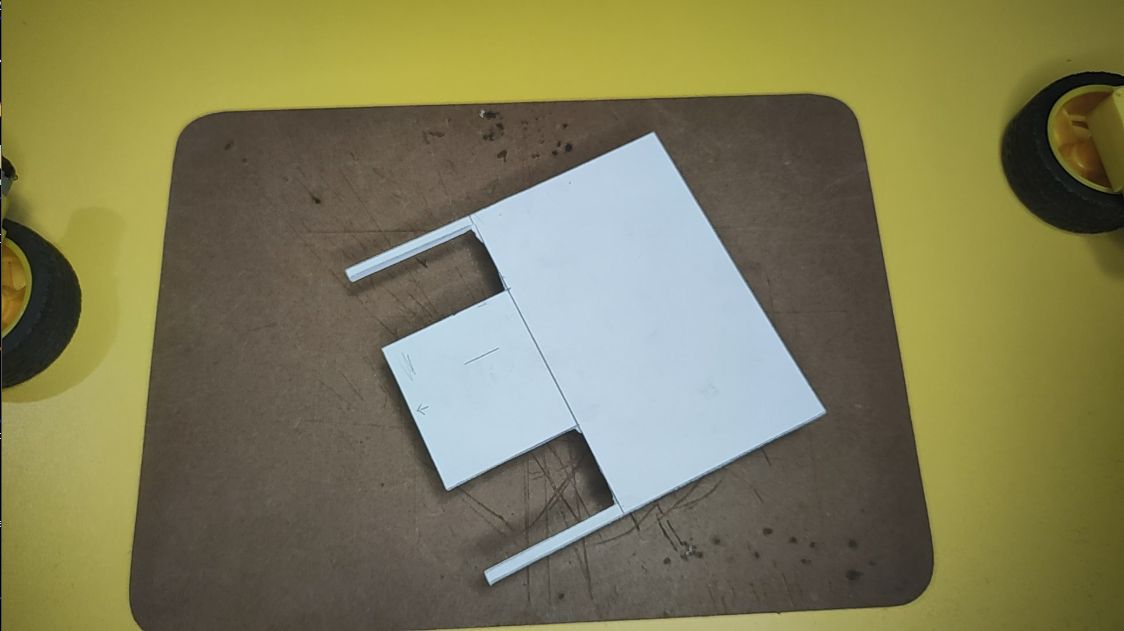
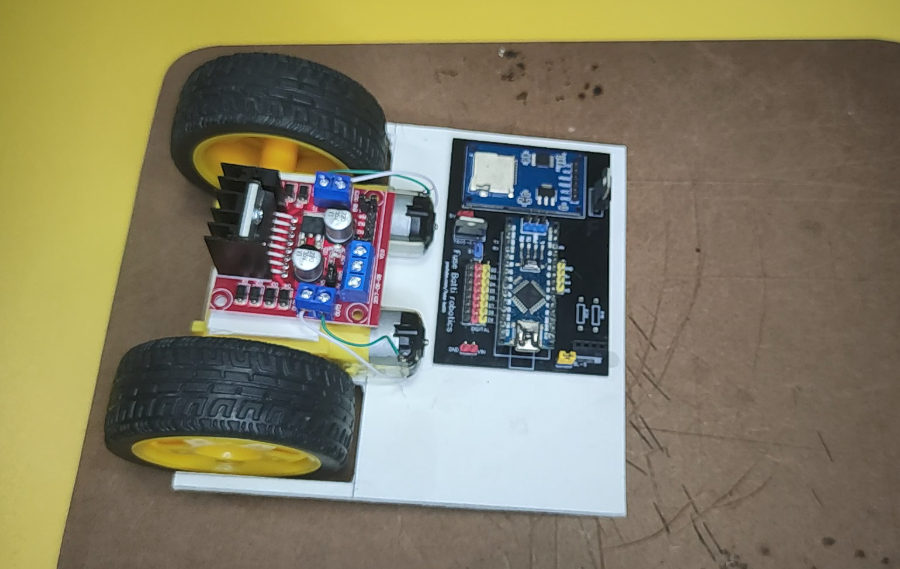
J'ai fabriqué le châssis/corps de ce robot à partir d'une feuille de PVC de 13 cm/13,5 cm. Il est plus facile à couper à l'aide d'une lame/un couteau et fonctionne également très bien avec des colles.
Comme vous pouvez le voir dans la vidéo, j'ai découpé des pièces pour monter deux moteurs et des roues à l'intérieur de la zone de la carte. Et puis les a collés.
Lorsque vous ferez le vôtre, vous n'avez pas besoin de le faire ressembler exactement à ceci. Votre bot au choix.
Étape 4 : Construire un circuit ou utiliser un PCB ?


Ici encore, nous arrivons au point où c'est complètement votre choix. Mais, pour faire un circuit comme celui-ci, il faut beaucoup de câblage, et si vous le faites à l'aide d'une planche à pain, une mauvaise connexion peut entraver l'ensemble du projet. C'est pourquoi j'aime utiliser des PCB dans mes projets.
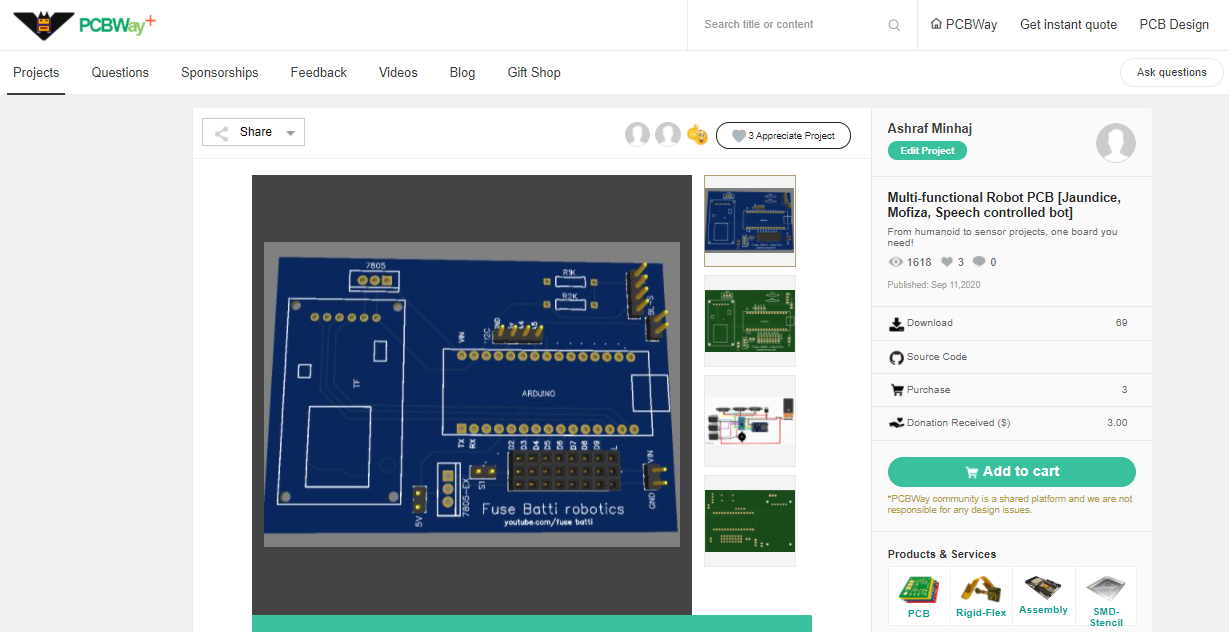
J'ai conçu ce PCB à l'aide d'EasyEDA et je l'ai commandé sur PCBWay.com. PCBWay offre la qualité à un prix inférieur. Vous pouvez obtenir 10 PCB multicouches avec seulement 5$. Ils parrainent également des projets d'étudiants, ce qui me fait plaisir.
Quoi qu'il en soit, je suis allé dans la section Commande rapide où tout ce que j'avais à faire était de télécharger mon PCB, le système a détecté automatiquement tous les paramètres de ma carte et j'ai juste sélectionné les couleurs. Le noir est mon préféré et regardez à quel point il est brillant et cool. C'est mieux parce qu'ils ne prennent pas d'argent tant que leur équipe d'ingénieurs n'a pas inspecté votre PCB, assez bien !
Obtenez la carte PCB d'ici.
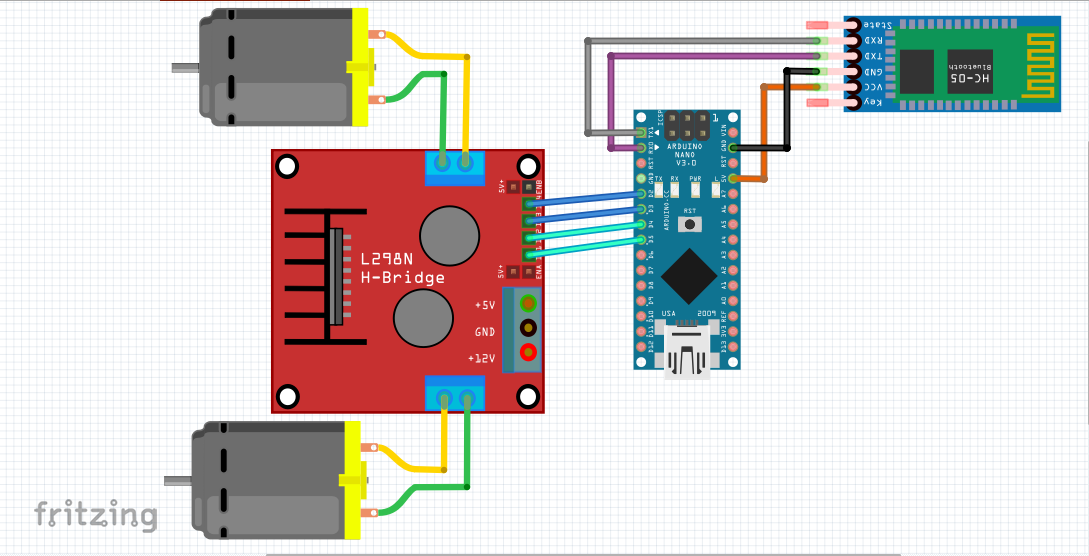
Cependant, si vous ne pouvez pas commander ou utiliser ce PCB, vous pouvez le faire sur une planche à pain ou une planche vero. J'ai téléchargé le circuit fritzing pour vous. Téléchargez-le ci-dessous ou obtenez-le ici.
robot-contrôlé-par la parole-schematic.fzz
Étape 5 :Connectez l'électronique
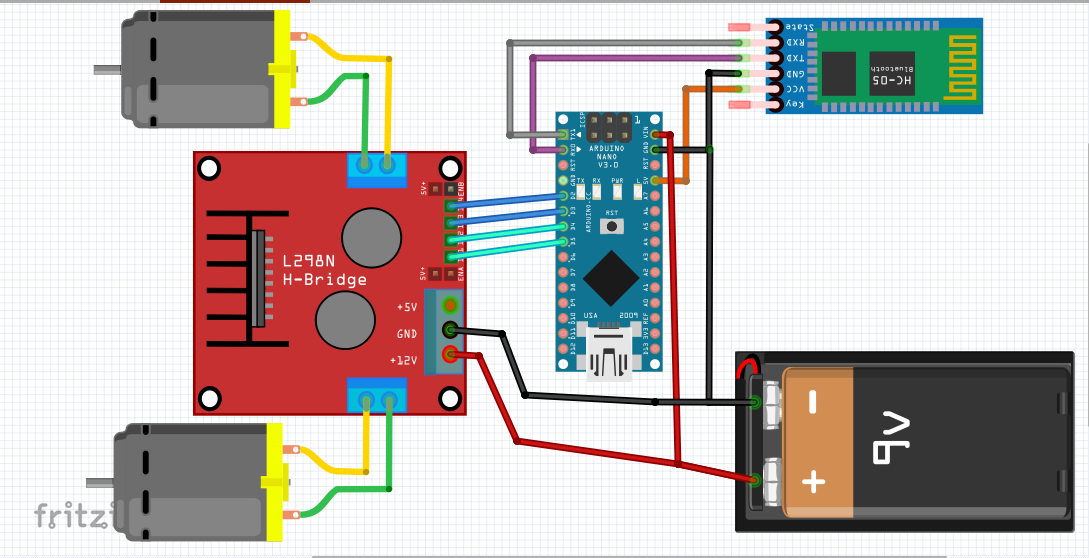
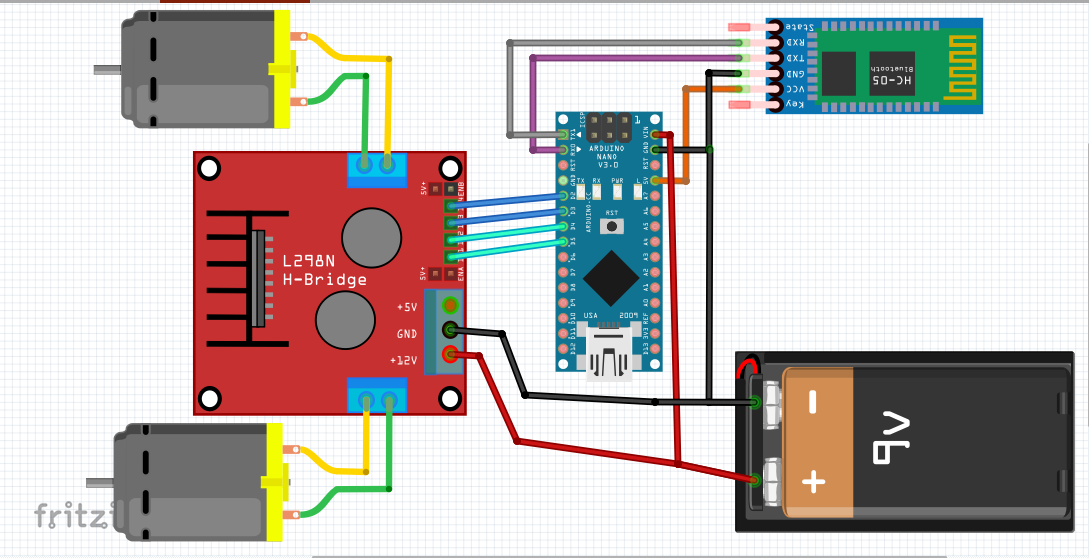
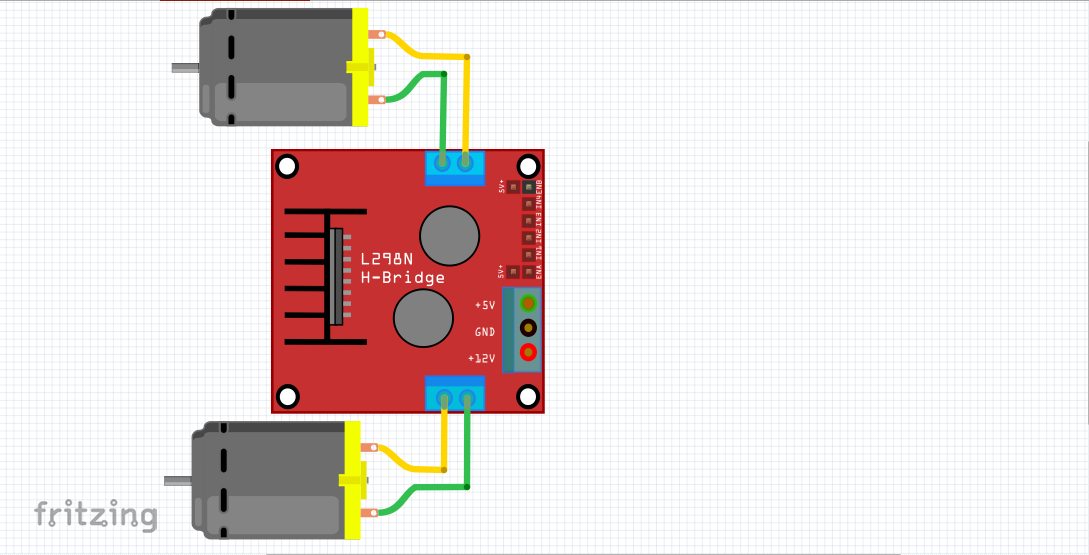
La connexion est simple. Connectez toutes les choses comme indiqué dans le schéma de circuit. Je vais commencer par connecter les moteurs au pilote de moteur -
Moteur à moteur,
- Les fils du moteur 1 vont à une extrémité du pilote,
- Motor2 va à l'autre bout.
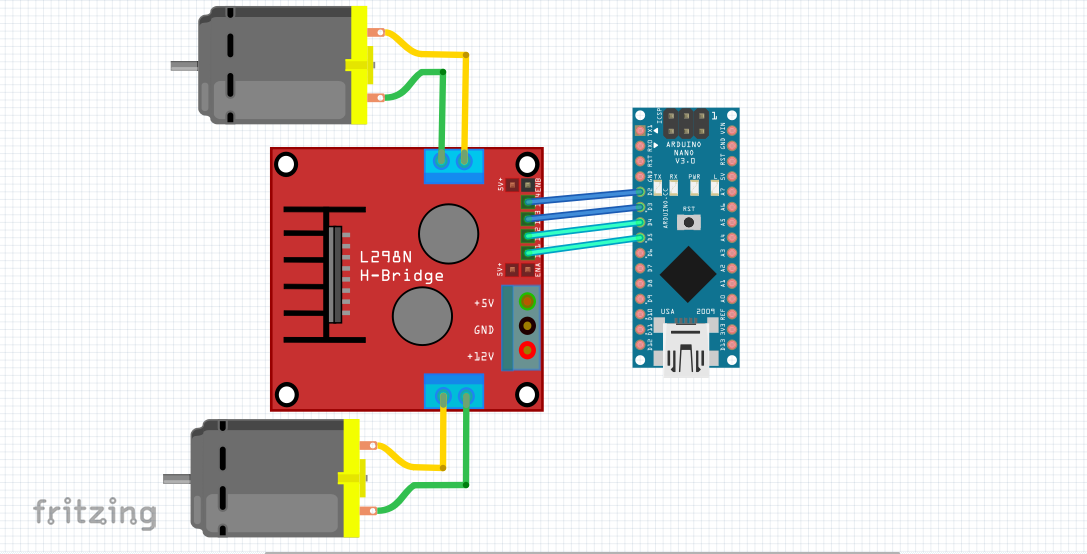
Pour contrôler les moteurs,
- Les broches du moteur 1 sur le pilote de moteur L298n se connectent aux broches Arduino 2 et 3 (numériques).
- Motor2 se connecte sur 4 et 5
Module Bluetooth,
- Tx vers Arduino Rx
- Rx vers TX
- VCC à 5V/VCC
- Gnd à GND (terre)
Batterie,
J'ai utilisé une batterie de 7,4 V pour les moteurs, qui se connecte à l'entrée du pilote de moteur et à Arduino VIN et Ground Pin. Une connexion à la terre commune est nécessaire.
Ensuite, j'ai connecté la batterie dans toutes les choses allumées. Ça veut dire que je ne me suis pas trompé.
Étape 6 :Programmation d'Arduino
C'est un programme simple. Le programme vérifie les caractères et s'ils sont reçus, il va de gauche à droite, etc. La liste est -
- 'F' - En avant
- 'B' - En arrière
- 'L' - Gauche
- 'R' - Droit
Le module Bluetooth est connecté sur le port série, donc Arduino communique en série en 9600 bps.
J'ai configuré la section J'ai défini les broches et le taux de buad -
void setup(){//initialiser le mode du pinspinMode(lm1,OUTPUT);pinMode(lm2,OUTPUT);pinMode(rm1,OUTPUT);pinMode(rm2,OUTPUT);//définir le taux de communication sérieSerial.begin(96000);} Le dans la boucle principale Il a vérifié les données reçues sur série-
//vérifier si l'arduino reçoit le signal ou pas(Serial.available() ==0);val =Serial.read() ; //lit le signalSerial.print(val); Et puis le code principal, téléchargez-le ici. J'ai collé tout le code ci-dessous -
/**** Arduino Speech/voice Controlled Robot **** par Ashraf Minhaj* écrivez-moi à ashraf_minhaj@yahoo.com* tutorial- ashrafminhajfb.blogspot.com*///Déclarez l'arduino pinsint lm1 =4 ; //déclare le 1er pins du moteurint lm2 =5;int rm1 =2; //right motor pinsint rm2 =3;char val;void setup(){//initlize le mode du pinspinMode(lm1,OUTPUT);pinMode(lm2,OUTPUT);pinMode(rm1,OUTPUT);pinMode(rm2,OUTPUT); );//définir le taux de communication sérieSerial.begin(9600);}boucle vide(){//vérifier si arduino reçoit le signal ou pas(Serial.available() ==0);val =Serial.read() ; //lit le signal//Serial.print(val);/*********Pour le mouvement vers l'avant*********/if (val =='F'){//Serial .println("FORWARD");digitalWrite(lm1,HIGH);digitalWrite(rm1,HIGH);digitalWrite(lm2,LOW);digitalWrite(rm2,LOW);}/*********Pour le mouvement arrière *********/else if(val =='B'){digitalWrite(lm2,HIGH);digitalWrite(rm2,HIGH);digitalWrite(lm1,LOW);digitalWrite(rm1,LOW);} /*********Droit********/else if(val =='R'){digitalWrite(lm1,HIGH);digitalWrite(rm2,HIGH);digitalWrite(lm2, LOW);digitalWrite(rm1,LOW);}/*********Gauche*********/else if(val =='L'){digitalWrite(lm2,HIGH); digitalWrite(rm1,HIGH);digitalWrite(lm1,LOW);digitalWrite(rm2,LOW);}/************STOP*********/else{digitalWrite(lm1,LOW );digitalWrite(rm1,LOW);digitalWrite(lm2,LOW);digitalWrite(rm2,LOW);}delay(10);} Téléchargez le code, puis créez l'application.
Étape 7 : Application pour la parole en texte
J'ai créé l'application en utilisant l'inventeur de l'application MIT. Vous pouvez modifier et personnaliser cette application selon vos besoins. Obtenez l'aia fie d'ici.
Cette application utilise la connectivité Bluetooth pour contrôler le robot. Pour cela, j'avais besoin de coupler le module Bluetooth HC05 à mon téléphone. Le mot de passe par défaut est 1234 ou 0000.
Cette application utilise l'API Google Speech to Text pour convertir ce que je dis sous forme de texte. Ensuite, cela rend la phrase en minuscule, c'est plus facile à traiter de cette façon. Et correspond à l'aide des instructions if else. Si l'utilisateur dit « en avant », envoyez à Arduono la lettre « F » et il ira de l'avant. C'est tout.
Créez et enregistrez en tant que fichier APK, ou utilisez le mien pour l'installer sur votre téléphone.
robot-contrôlé-par la parole-schematic.fzz
Étape 8 : alimentez le bot, exécutez l'application et lancez-vous !
Maintenant, branchez simplement la batterie et utilisez l'application Android pour jouer avec votre tout nouveau robot !
Merci pour la lecture. Consulter mon dernier projet -
Code
- Extrait de code n° 1
- Extrait de code 3
Extrait de code n°1Texte brut
void setup(){ //initialiser le mode des broches pinMode(lm1,OUTPUT); pinMode(lm2,OUTPUT); pinMode(rm1,OUTPUT); pinMode(rm2,OUTPUT); //définir le taux de communication série Serial.begin(96000);} Extrait de code n°3Texte brut
/**** Arduino Speech/Voice Controlled Robot *** * par Ashraf Minhaj * envoyez-moi un e-mail à ashraf_minhaj@yahoo.com * tutorial- ashrafminhajfb.blogspot.com *///Déclarez l'arduino pinsint lm1 =4 ; //déclare le 1er pins du moteurint lm2 =5;int rm1 =2; //right motor pinsint rm2 =3;char val;void setup(){ //initialise le mode des broches pinMode(lm1,OUTPUT); pinMode(lm2,OUTPUT); pinMode(rm1,OUTPUT); pinMode(rm2,OUTPUT); //définir le taux de communication série Serial.begin(9600);}void loop(){ //vérifier si arduino reçoit le signal ou non tandis que(Serial.available() ==0); val =Serial.read(); //lit le signal //Serial.print(val); /*********Pour le mouvement vers l'avant*********/ if (val =='F') { //Serial.println("FORWARD"); digitalWrite(lm1,HIGH); digitalWrite(rm1,HIGH); digitalWrite(lm2,LOW); digitalWrite(rm2,LOW); } /*********Pour le mouvement arrière*********/ else if(val =='B') { digitalWrite(lm2,HIGH); digitalWrite(rm2,HIGH); digitalWrite(lm1,LOW); digitalWrite(rm1,LOW); } /*********Droite*********/ else if(val =='R') { digitalWrite(lm1,HIGH); digitalWrite(rm2,HIGH); digitalWrite(lm2,LOW); digitalWrite(rm1,LOW); } /*********Gauche*********/ else if(val =='L') { digitalWrite(lm2,HIGH); digitalWrite(rm1,HIGH); digitalWrite(lm1,LOW); digitalWrite(rm2,LOW); } /*********STOP*********/ else { digitalWrite(lm1,LOW); digitalWrite(rm1,LOW); digitalWrite(lm2,LOW); digitalWrite(rm2,LOW); } délai(10) ; } Github
https://github.com/ashraf-minhaj/speech-controled-robothttps://github.com/ashraf-minhaj/speech-control-robotSchémas
robot-commande-parole-schematic_hUoWKpapKe.fzzProcessus de fabrication
- Robot Raspberry Pi contrôlé par Bluetooth
- Créez votre robot de streaming vidéo contrôlé par Internet avec Arduino et Raspberry Pi
- Windows 10 IoT Core :Robot à commande vocale
- Robot contrôlé par Wi-Fi utilisant Raspberry Pi
- Voiture RC contrôlée par joystick
- Robot suiveur de ligne
- Bras robotique contrôlé par Nunchuk (avec Arduino)
- Arme de robot contrôlée via Ethernet
- MobBob :Robot Arduino DIY contrôlé par smartphone Android