


Wi-Servo :Servomoteurs Wi-Fi contrôlés par navigateur
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Ce projet montre comment contrôler à distance certains servomoteurs dans un réseau Wi-Fi, à l'aide d'un navigateur internet ordinaire (Firefox, par exemple). Cela peut être utilisé dans plusieurs applications :jouets, robots, drones, caméra panoramique/inclinable, etc.
Les moteurs étaient connectés à un Arduino Uno, qui connecte le réseau Wi-Fi via un module ESP-8266. L'interface de contrôle a été conçue avec HTML et jQuery.
Le tutoriel de Miguel (http://allaboutee.com/2015/01/02/esp8266-arduino-led-control-from-webpage/), qui montre comment allumer/éteindre les LED à l'aide de l'ESP-8266, a servi d'inspiration pour cela poste.
La technique présentée ici est utilisée dans un de mes projets :"Robô da Alegria". Vous trouverez peut-être plus à ce sujet dans l'un des liens suivants :
https://hackaday.io/project/12873-rob-da-alegria-joy-robot
https://www.facebook.com/robodaalegria/
https://github.com/ferauche/RoboAlegria
Étape 1 : Électronique

Pour ce projet, vous aurez besoin des composants suivants :
- Arduino Uno (acheter)
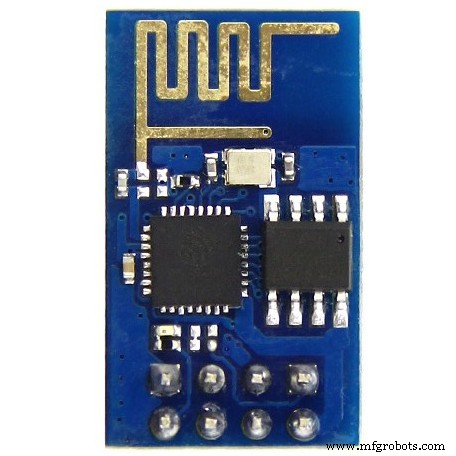
- ESP8266 (acheter)
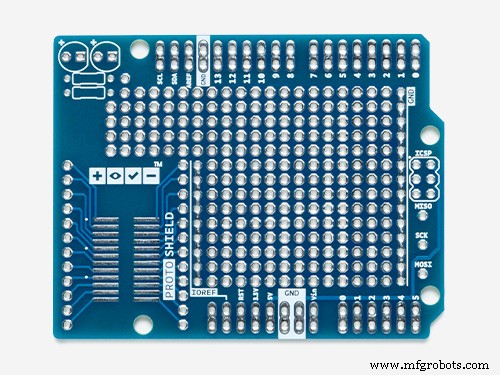
- Protoshield (pour une version plus compacte) ou une planche à pain ordinaire (acheter)
- Résistance de 10 kohms (x3)
- Quelques fils de liaison
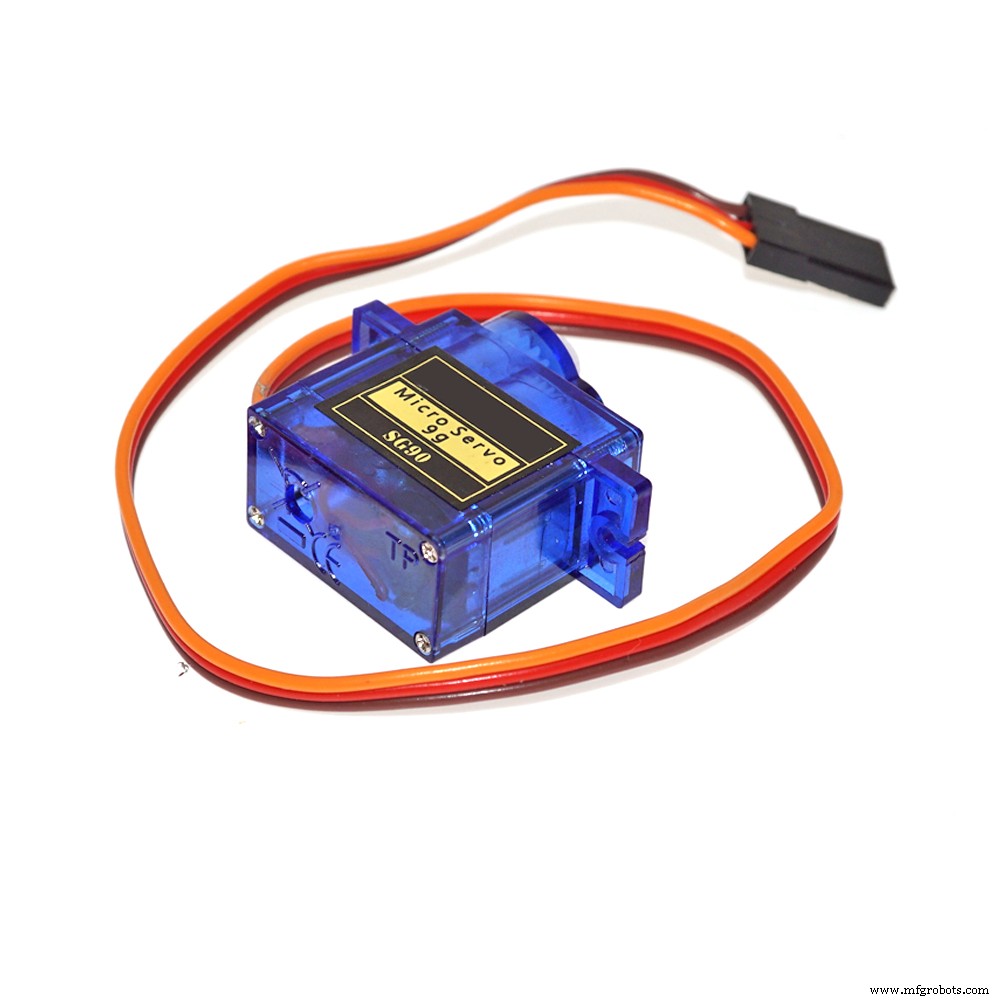
- Servomoteur SG90 (x2) (achat)
- Un ordinateur (pour compiler et télécharger le code Arduino)
Vous n'aurez pas besoin d'outils spécifiques pour l'assemblage de ce projet. Tous les composants sont disponibles en ligne sur votre boutique e-commerce préférée. Le circuit est alimenté par le port USB (connecté à un ordinateur ou à un chargeur de téléphone ordinaire), mais vous pouvez également ajouter une alimentation CC externe ou une batterie connectée à la prise d'alimentation Arduino.
Étape 2 :Assemblage
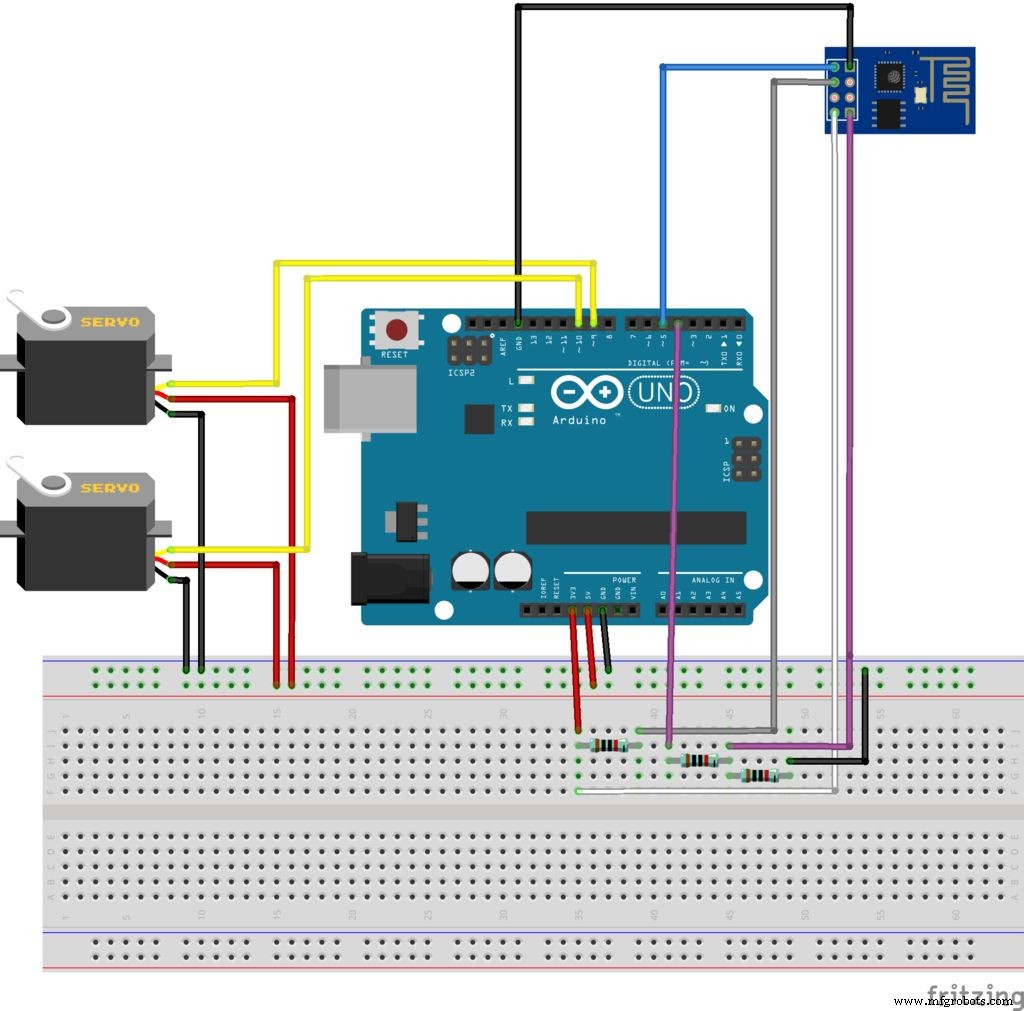
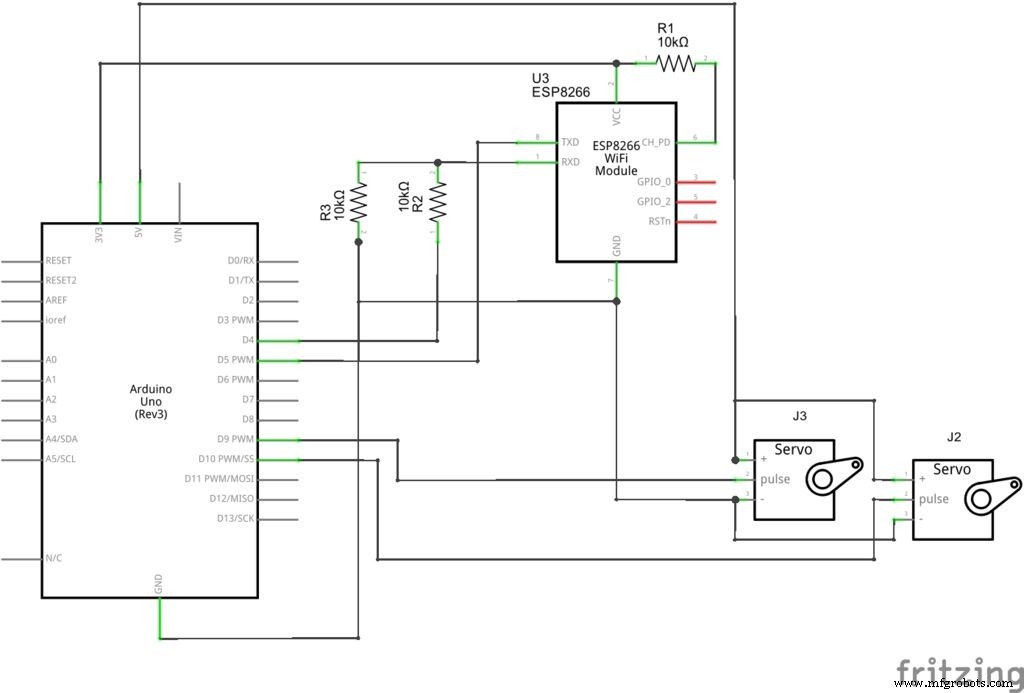
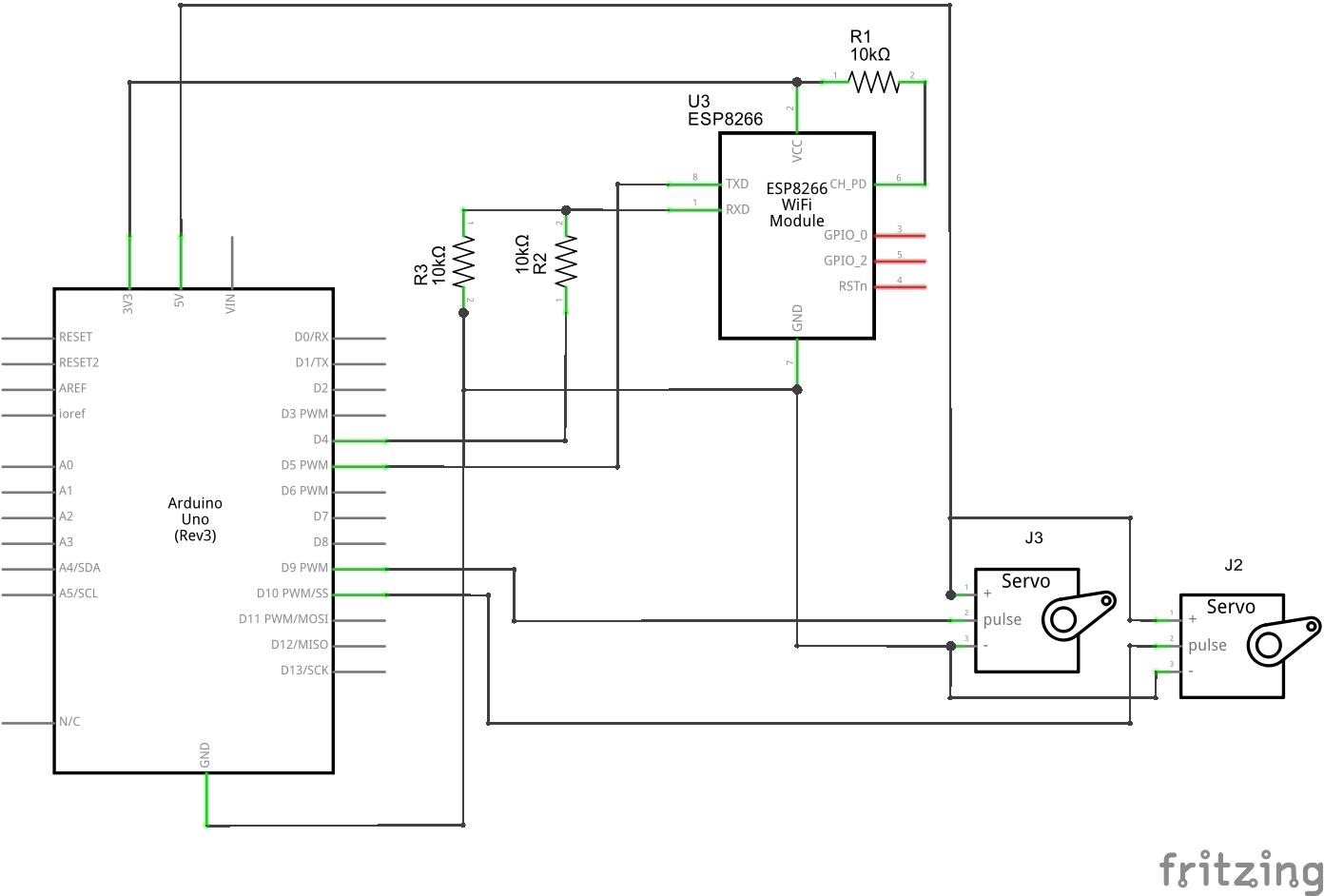
Connectez tous les composants selon le schéma. Vous aurez besoin de cavaliers pour connecter le module ESP-8266 et les servomoteurs. Vous pouvez utiliser un proto-shield (pour un circuit plus compact), une planche à pain ordinaire ou concevoir votre propre shield Arduino.
Branchez le câble USB sur la carte Arduino Uno et passez à l'étape suivante.
Étape 3 :code Arduino
Installez le dernier IDE Arduino. Dans ce projet, la bibliothèque servo.h a été utilisée pour le contrôle des servos. Afin d'éviter tout conflit entre le module Wi-Fi et le port USB de l'ordinateur lors du téléchargement du code, softserial bibliothèque a été utilisée. Aucune bibliothèque supplémentaire n'était nécessaire pour la communication avec le module ESP-8266. Veuillez vérifier le débit en bauds de votre ESP8266 et le définir correctement dans le code.
Certains servomoteurs se mettent à trembler et à faire des bruits étranges lorsque sa position est proche des limites (0 et 180 degrés). Pour éviter cela, l'angle était limité entre 10 et 170 degrés à la fois dans le code Arduino et dans l'interface de contrôle (plus tard).
Malheureusement, servo.h bibliothèque et softserial.h bibliothèque utilisent le même minuteur du microcontrôleur. Cela peut provoquer une gigue dans les servos chaque fois que l'Arduino communique avec l'ESP-8266. Pour éviter cela, les servos sont détachés de l'Arduino après chaque commande. Vous pouvez également connecter le module aux broches série standard. Dans ce cas, pensez à déconnecter le module avant chaque upload.
Téléchargez le code Arduino (wi-servo.ino ) et remplacez le XXXXX par le SSID de votre routeur Wi-Fi et YYYYY par le mot de passe de votre routeur. Connectez la carte Arduino au port USB de votre ordinateur et téléchargez le code.
Étape 4 : Interface
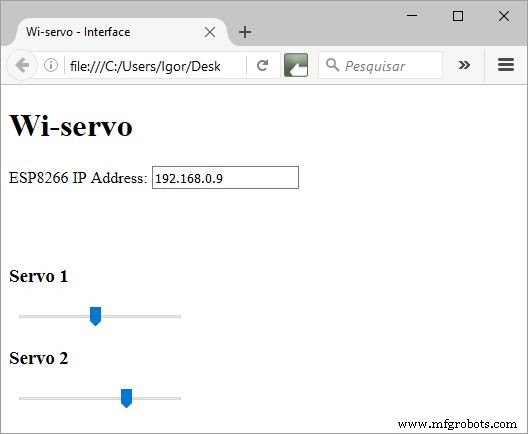
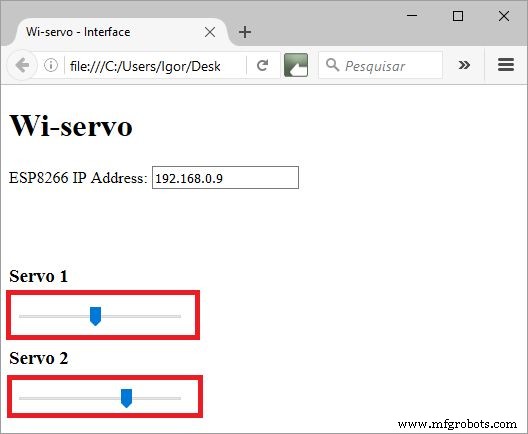
Une interface HTML a été conçue pour le contrôle des servomoteurs. Dans cet exemple, deux servos ont été utilisés, mais d'autres peuvent être ajoutés à l'Arduino Uno (j'ai testé jusqu'à quatre moteurs).
Un formulaire de zone de texte est utilisé pour entrer l'adresse IP du module ESP. Télécharger Wi-servo.html et jquery.js fichiers et enregistrez les deux dans le même dossier.
Étape 5 :Utilisation
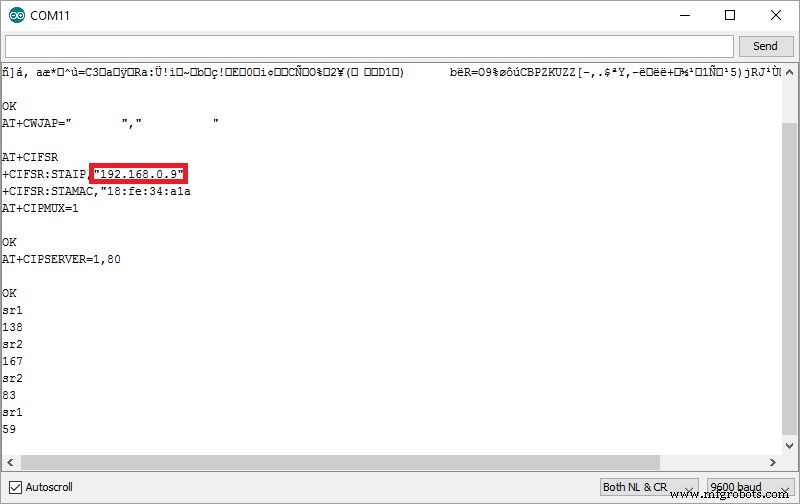
Lorsque l'Arduino est redémarré, il essaiera de se connecter automatiquement à votre réseau Wi-Fi. Utilisez Serial Monitor pour vérifier si la connexion a réussi et pour obtenir quelle IP a été attribuée à votre ESP-8266 par votre routeur.
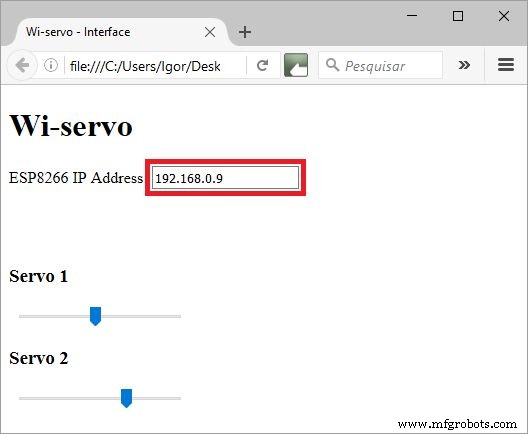
Ouvrez le fichier html dans un navigateur Internet (Firefox).
Informez l'adresse IP de votre ESP-8266 dans la zone de texte et vous serez prêt à partir. Sélectionnez l'angle souhaité pour chaque servo à l'aide des curseurs. Le navigateur enverra automatiquement une demande à l'Arduino lorsque vous relâcherez le bouton de la souris et déplacerez chaque servo.
Code
Github
https://github.com/ferauche/RoboAlegriahttps://github.com/ferauche/RoboAlegriaSchémas
Processus de fabrication
- Robot Raspberry Pi contrôlé par Bluetooth
- WebServerBlink avec Arduino Uno WiFi
- Voiture RC contrôlée par joystick
- Calculatrice UNO simple
- Bras robotique contrôlé par Nunchuk (avec Arduino)
- Robot à commande vocale
- Persistance de la vision
- Robot piano contrôlé par Arduino :PiBot
- Lumière tactile à l'aide d'Arduino