


Transformez votre voiture RC en voiture RC Bluetooth
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 |
Outils et machines nécessaires
 |
|
Applications et services en ligne
| |
|
À propos de ce projet




Les voitures RC sont vraiment amusantes à pirater et elles fournissent un bon châssis à bas prix, pour fabriquer des robots, mais en choisir un à fabriquer est une corvée avec des millions de types. Mon petit frère a fêté son anniversaire récemment et je voulais lui offrir quelque chose de vraiment cool, j'ai fini par lui offrir cette voiture rc. Le piratage de voitures RC est également facile et difficile, en raison de la manière différente dont les voitures RC sont fabriquées, il ne permet pas de pirater la voiture de manière simple et définie, mais ce hack est universel. Je vais également essayer de couvrir les bases de toutes les parties et de la théorie derrière chaque module. Nous avons utilisé le module mais vous êtes encouragé à faire notre circuit, sauf le pro mini.
J'étais vraiment mal à l'aise avec Promini car c'était trop petit mais c'était amusant.
Regardez la vidéo et assurez-vous de vous abonner pour les prochaines vidéos
Étape 1 :Obtenir le bon châssis



Liste des pièces
- ProMini
- Module L293d
- hc-05
- Voiture Rc
Obtenir le bon châssis
Choisir le châssis est une question de mécanisme d'entraînement, il existe de nombreux mécanismes d'entraînement.
Parlons des deux mécanismes les plus populaires.
Entraînement différentiel Qu'est-ce que l'entraînement différentiel ?
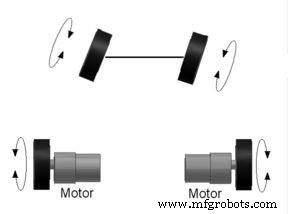
Le terme différentiel signifie différence entre deux entités, dans le contexte de la robotique, il s'agit simplement de la différence de vitesse entre deux moteurs. Sur la base de cette différence de vitesse, un robot peut être déplacé dans n'importe quelle direction sur une disposition 2D.
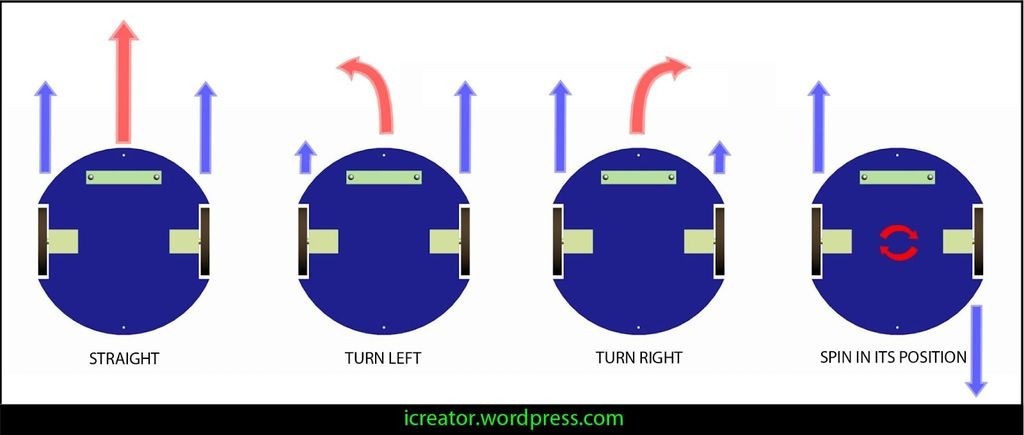
Lorsque deux moteurs sont connectés à des roues sur une ligne, opposées l'une à l'autre (tout comme une paire de roues connectées à un seul arbre), la vitesse à laquelle chaque moteur tourne détermine la direction du mouvement. Lorsque les deux roues tournent à la même vitesse, la différence entre les moteurs est nulle. Cela fait avancer le robot en ligne droite. Le robot peut se déplacer en sens inverse si le sens de rotation des deux moteurs est inversé. Ce sera à nouveau en ligne droite si la différence de vitesse est nulle. Maintenant, changer la vitesse de n'importe quel moteur entraînera un mouvement dans une direction éloignée de la ligne droite. Par exemple, réduire la vitesse du moteur droit entraînera une différence de vitesse et donc un changement de direction. La force résultante est telle que le robot tourne à droite. Ce changement de direction peut être contrôlé à l'angle requis en réduisant davantage la vitesse du moteur. Plus lent est le bon moteur, plus net est le virage à droite. C'est exactement la même chose pour le virage à gauche.
En conclusion, moteur droit plus lent, virage à droite plus net. Moteur gauche plus lent Virage à gauche plus prononcé. Vous trouverez ci-dessous quelques scénarios qui expliquent le fonctionnement du mécanisme d'entraînement différentiel. M1 et M2 sont des moteurs qui entraînent respectivement des roues à gauche et à droite.
Entraînement de type direction
Qu'est-ce qu'un entraînement de type Steer ?
Le lecteur de type voiture est le plus courant dans le monde réel mais pas dans le monde des robots. Il se caractérise par une paire de roues motrices et une paire de roues directrices distinctes. La translation et la rotation sont indépendantes l'une de l'autre. Mais la translation et la rotation sont liées, ce système est donc confronté à un grave problème de planification de trajectoire. Quatre roues sont plus efficaces que trois ou deux roues. Les deux premières des quatre roues peuvent être utilisées pour diriger et les deux suivantes pour conduire le robot. Équilibrer un robot à quatre roues n'est jamais un problème. La plupart des voitures que nous utilisons au quotidien sont à quatre roues et l'exemple suffit à prouver son existence et ses capacités.
Inconvénients du type de voiture Drive :Le mécanisme de rotation doit être contrôlé avec précision. Une légère imprécision peut entraîner d'importantes erreurs d'odométrie Le système est non-holonomique, la planification de la trajectoire est donc extrêmement difficile et inexacte Il n'y a pas d'actionneurs directionnels directs
Il est donc préférable d'utiliser l'entraînement différentiel en raison de sa simplicité et de sa facilité d'utilisation.
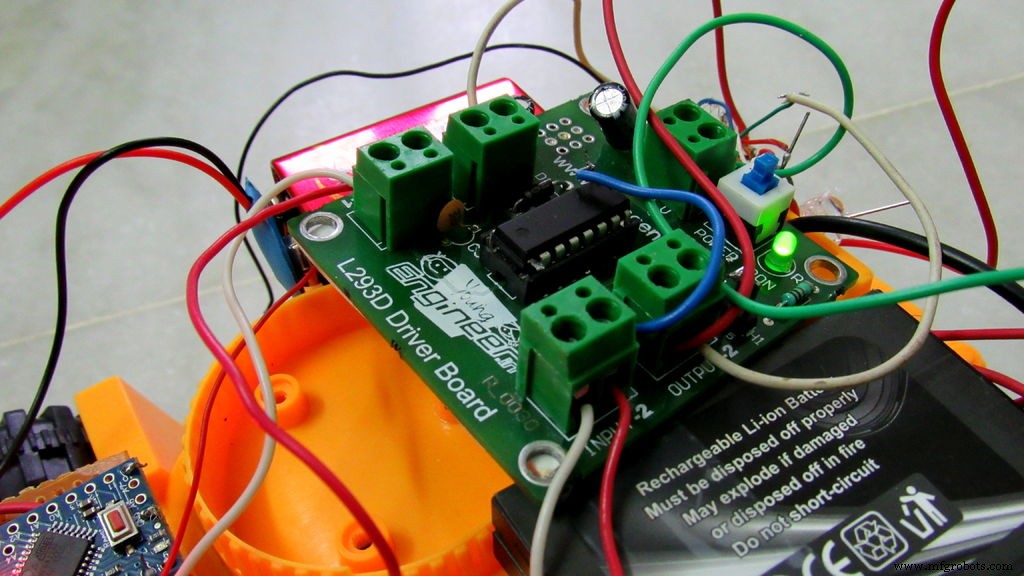
Étape 2 :Contrôler les moteurs
Pour contrôler le moteur, nous avons besoin de quelque chose que quelque chose a appelé le pilote de moteur.
Qu'est-ce qu'un conducteur de moteur ?
Un pilote de moteur est un petit amplificateur de courant; la fonction des pilotes de moteur est de prendre un signal de commande à faible courant, puis de le transformer en un signal à courant plus élevé qui peut piloter un moteur.
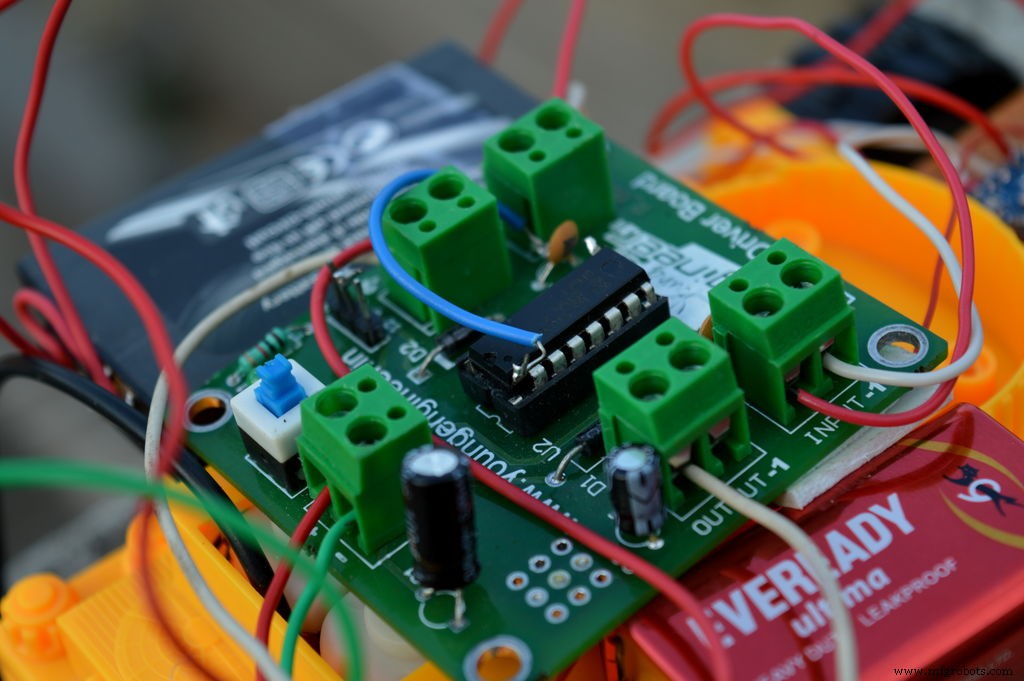
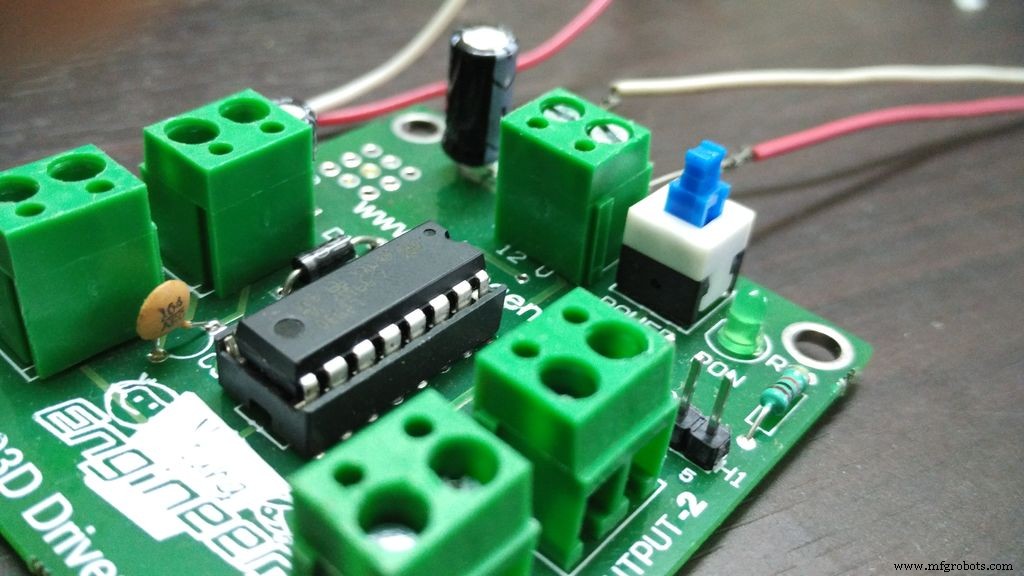
Il existe de nombreux pilotes de moteur parmi lesquels j'utilise le module de pilote de moteur l293d.
L293D est un circuit intégré de commande de moteur qui est utilisé pour entraîner des moteurs à courant continu tournant dans les deux sens. Il s'agit d'un circuit intégré à 16 broches qui peut contrôler un ensemble de deux moteurs à courant continu simultanément. Le L293D utilise 5 V pour sa propre alimentation et une source d'alimentation externe est nécessaire pour entraîner les moteurs, qui peuvent aller jusqu'à 36 V et consommer jusqu'à 600 mA. Le L293D fonctionne sur le concept de pont en H typique, un circuit qui permet à la haute tension de circuler dans les deux sens. Dans un seul circuit intégré L293D, il y a deux circuits en pont en H qui peuvent faire tourner deux moteurs à courant continu indépendamment.
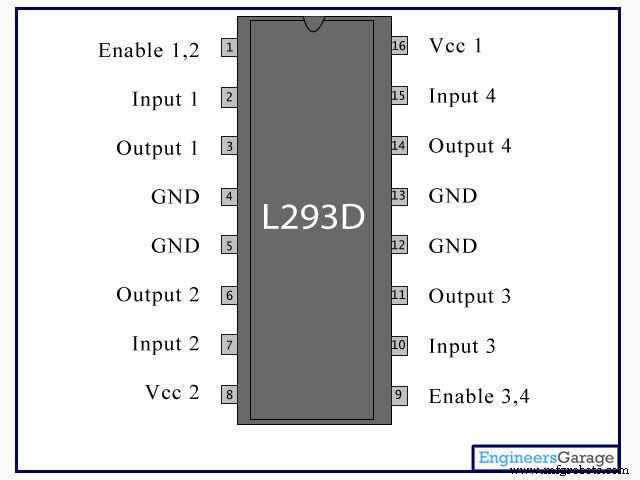
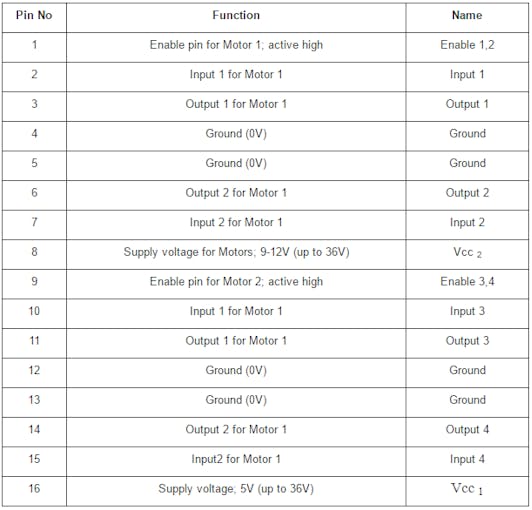
Épingler la description de L293d
1Broche d'activation pour le moteur 1 ; actif haut Activer 1,2 2 Entrée 1 pour Moteur 1 Entrée 1 3 Sortie 1 pour Moteur 1 Sortie 1 4 Terre (0V) Terre 5 Terre (0V) Terre 6 Sortie 2 pour Moteur 1 Sortie 2 7 Entrée 2 pour Moteur 1 Entrée 2 8 Tension d'alimentation pour les moteurs ; 9-12V (jusqu'à 36V) Vcc 2 9 Broche d'activation pour le moteur 2 ; active high Enable 3,4 10 Entrée 1 pour Moteur 1 Entrée 3 11 Sortie 1 pour Moteur 1 Sortie 3 12 Terre (0V) Terre 13 Terre (0V) Terre 14 Sortie 2 pour Moteur 1 Sortie 4 15 Entrée2 pour Moteur 1 Entrée 4 16 Tension d'alimentation ; 5V (jusqu'à 36V) Vcc 1
Étape 3 :À propos de l'application
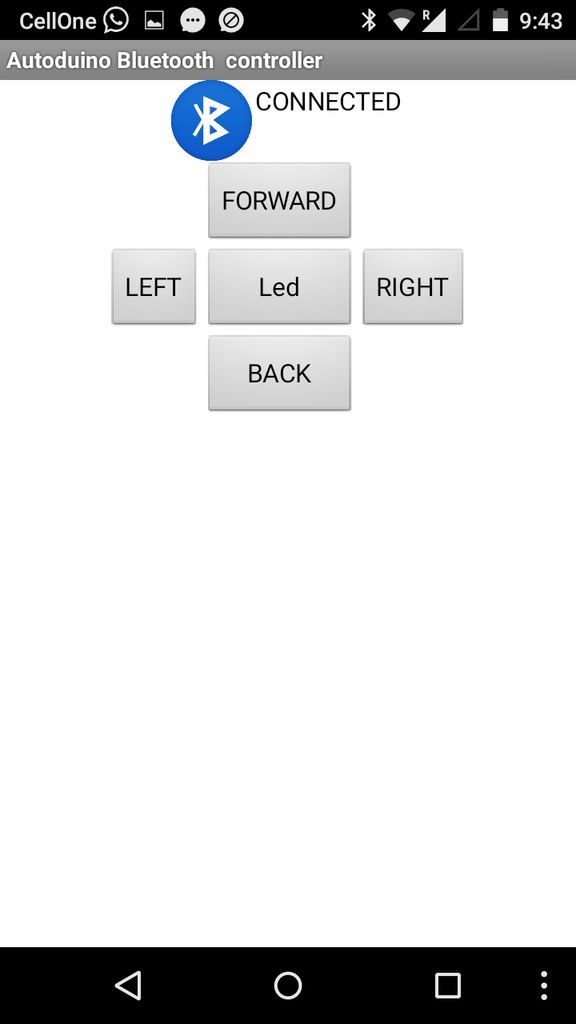


Il existe de nombreuses applications à contrôler que j'ai créées avec une. La logique est très simple, tout le bouton envoie un caractère lorsqu'il est enfoncé via Bluetooth et l'arduino le traite.
Fonctions de caractères
X État nul F Mouvement vers l'avant B Mouvement vers l'arrière L Tourner à gauche R Tourner à droite
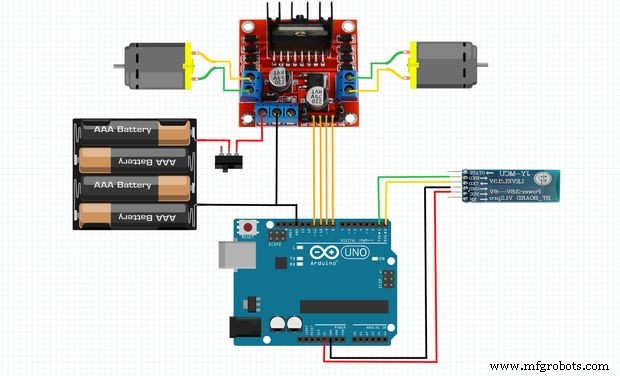
Étape 4 :Connectez toute la partie
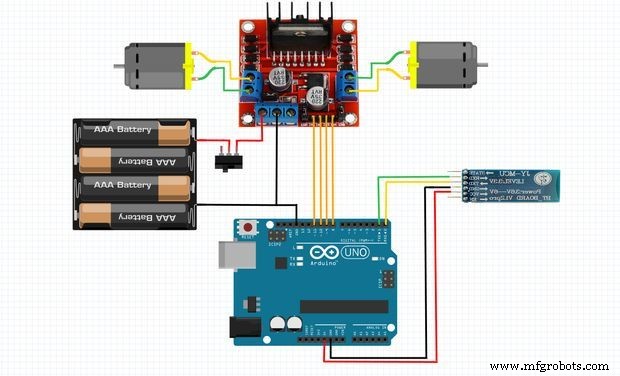

Les connexions sont simples
voici la connexion comme suit
Le module Bluetooth
Hc-05 Arduino Vcc 5v Gnd Gnd Rx Tx Tx Rx
Le conducteur de moteur
Pilote de moteur Arduino broche 2 8 broches 7 7 broches 10 6 broches 4 9 broches 3 et 6 Moteur 1 broche 11 et broche 14 Moteur 2 broche 1 5v broche 9 5v
Étape 5 :Codage


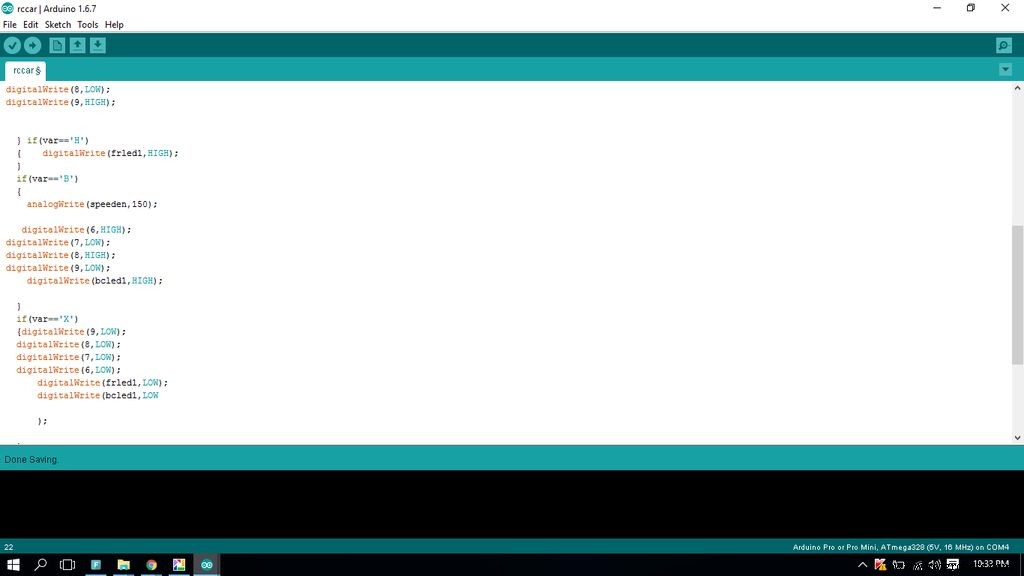
void setup() {Serial.begin(9600);pinMode(8, OUTPUT);pinMode(7, OUTPUT);pinMode(9, OUTPUT);pinMode(6, OUTPUT); pinMode(5, SORTIE); pinMode(4, SORTIE); digitalWrite(4,LOW); digitalWrite(5,LOW);}// la fonction de boucle s'exécute encore et encore forevervoid loop() {var=Serial.read();if(var=='F'){digitalWrite(6,LOW);digitalWrite( 7,HIGH);digitalWrite(8,LOW);digitalWrite(9,HIGH);} if(var=='H'){ digitalWrite(frled1,HIGH);}if(var=='B'){ analogWrite( accélérer,150); digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); digitalWrite(bcled1,HIGH);}if(var=='X'){digitalWrite(9,LOW);digitalWrite(8,LOW);digitalWrite(7,LOW);digitalWrite(6,LOW); digitalWrite(frled1,LOW); digitalWrite(bcled1,LOW );}if(var=='L'){digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW);}if(var =='R'){digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);;}} J'espère que vous apprécierez de faire le projet comme je l'ai fait. Je poste bientôt d'autres projets sympas, alors suivez-moi pour obtenir toutes les mises à jour. Aimez également ma page https://www.facebook.com/makewithRex/
F09ZCJSIP2UG2XP.ino
Code
- Extrait de code n° 1
Extrait de code n°1Texte brut
configuration vide() { Serial.begin(9600); pinMode(8, SORTIE); pinMode(7, SORTIE); pinMode(9, SORTIE); pinMode (6, SORTIE); pinMode(5, SORTIE); pinMode(4, SORTIE); digitalWrite(4,LOW); digitalWrite(5,LOW);}// la fonction de boucle s'exécute encore et encore forevervoid loop() { var=Serial.read(); if(var=='F') { digitalWrite(6,LOW);digitalWrite(7,HIGH);digitalWrite(8,LOW);digitalWrite(9,HIGH); } if(var=='H') { digitalWrite(frled1,HIGH); } if(var=='B') { analogWrite(speeden,150); digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); digitalWrite(bcled1,HIGH); } if(var=='X') {digitalWrite(9,LOW); digitalWrite(8,LOW); digitalWrite(7,LOW); écriture numérique (6, FAIBLE); digitalWrite(frled1,LOW); digitalWrite(bcled1,LOW ); } if(var=='L') {digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); } if(var=='R') {digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);; }} Schémas
Processus de fabrication
- Constructeur C#
- Transformez votre Raspberry Pi en un moniteur d'activité pour hamster
- Votre smartphone et la voiture connectée
- Comment transformer votre chaîne d'approvisionnement en centre de profit
- Comment transformer vos conceptions créatives en réalité ?
- Comment réparer la climatisation de votre voiture en quelques étapes
- Comment choisir un turbocompresseur pour votre voiture ?
- Comment réparer votre poignée de porte de voiture
- Comment recharger votre climatiseur de voiture