


Robot à commande par gestes de la main
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
MISE À JOUR :LA VERSION MIS À JOUR DE CE PROJET PEUT ÊTRE TROUVÉE ICI
Introduction
J'aimerais pouvoir tout contrôler avec mes mains ! Assis sur ma chaise et contrôlant les choses comme un BOSS. j'adorerais ! J'ai donc finalement sorti un robot de reconnaissance des gestes de la main, qui peut suivre les commandes faites par les gestes de la main. Cela semble fou, mais je vous promets que c'est très simple. Faire un robot à commande gestuelle est en fait très simple. Ce robot est une amélioration de mon autre voiture RC de projet de bricolage utilisant un module RF.
Ici aussi, le robot est divisé en deux parties, émetteur et récepteur. Le circuit récepteur est le même que celui de l'ancien poste et il n'y a qu'un léger changement dans le circuit émetteur, ici il faut programmer le circuit émetteur. J'utiliserai donc un Arduino comme plate-forme de programmation. Pour reconnaître les gestes effectués, j'utiliserai un capteur accéléromètre. Alors commençons à construire !
Regardez le robot en action
Qu'est-ce que c'est et comment ça marche ?
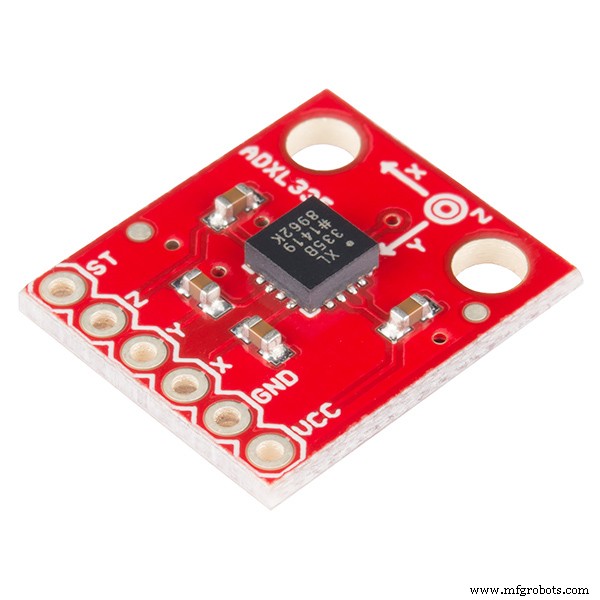
Qu'est-ce qu'un accéléromètre (ADXL335) ?
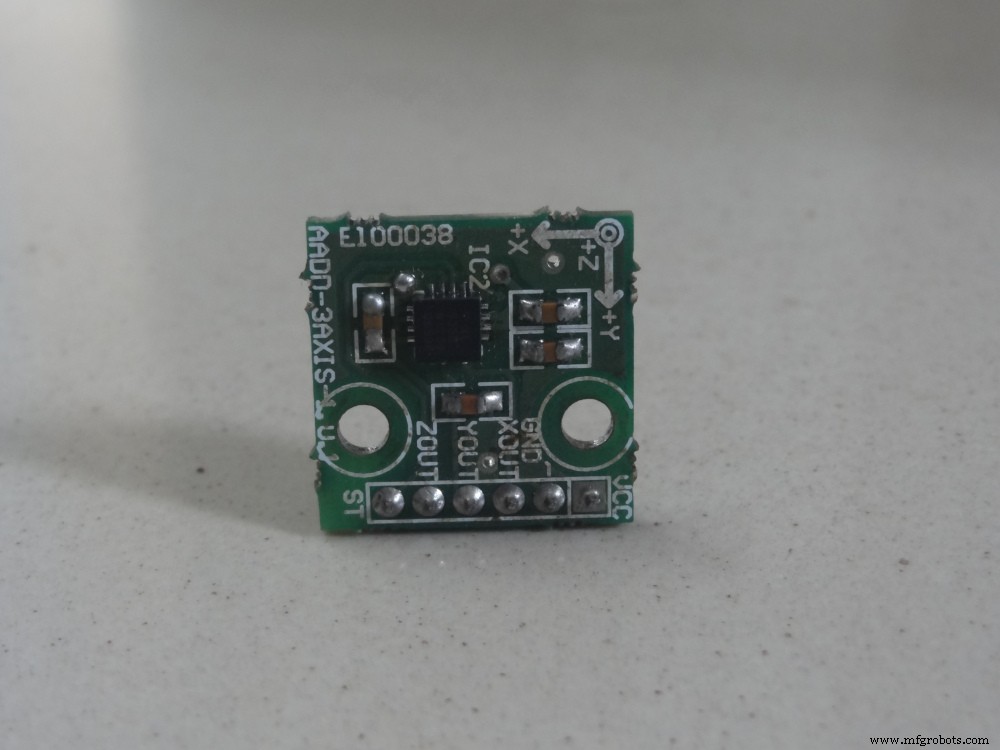
En bref, un accéléromètre est un appareil de mesure d'accélération à trois axes. L'accéléromètre utilisé ici est ADXL335 et il a 3 axes (X Y Z).
Presque tous les smartphones ont désormais des accéléromètres (même si nous n'allons pas le prendre à partir d'un smartphone). Vous avez certainement joué à des jeux de mouvement sur votre mobile (par exemple, Temple run) où le personnage du jeu se déplace à gauche et à droite lorsque vous inclinez votre téléphone respectivement à gauche et à droite, l'accéléromètre le fait.
Il y a un autre capteur appelé Gyroscope trouvé dans le smartphone dont nous n'avons pas besoin maintenant.
Comment ça marche et reconnaitre les gestes ?
Ici, le cerveau du robot est Arduino Uno (Atmega32), il est alimenté par un ensemble de code. Les gestes/mouvements faits à la main sont reconnus par un appareil de mesure de l'accélération appelé accéléromètre (ADXL335).
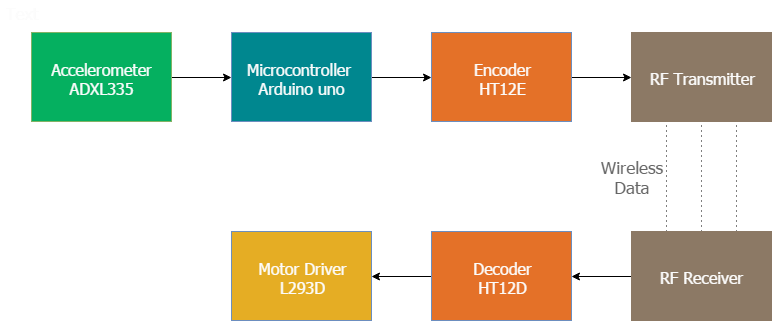
Ici, l'accéléromètre lit les coordonnées X Y Z lorsque nous faisons des gestes à la main et envoyons les coordonnées X Y Z à l'Arduino (ici nous n'avons pas besoin de l'axe Z, nous n'avons besoin que de deux coordonnées X et Y, donc négligez la coordonnée Z). L'Arduino vérifie les valeurs des coordonnées et envoie un code de 4 bits à l'encodeur IC. L'encodeur transmet les données à l'émetteur et les données transmises sont reçues par le récepteur RF. Le récepteur envoie le code à 4 bits au décodeur IC et le décodeur le transmet au Motor Driver IC. Plus tard, le conducteur du moteur prend la décision de faire tourner les deux moteurs dans la direction requise.
Faire l'alimentation
Tout d'abord, nous allons commencer par le circuit d'alimentation. Nous avons besoin de deux circuits d'alimentation :un pour l'émetteur et un pour le récepteur. Le circuit récepteur doit être alimenté à l'aide d'une alimentation 12 V (puisque j'utilise un moteur 12 V) et le circuit émetteur peut être alimenté à l'aide d'une batterie 9 V.
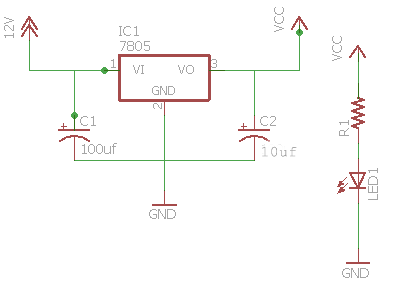
Vous pouvez voir le circuit d'alimentation du récepteur sur la droite. A l'aide de ce schéma, câblez le circuit d'alimentation. Vous pouvez également ajouter une LED via une résistance de 1k pour indiquer l'état d'alimentation.
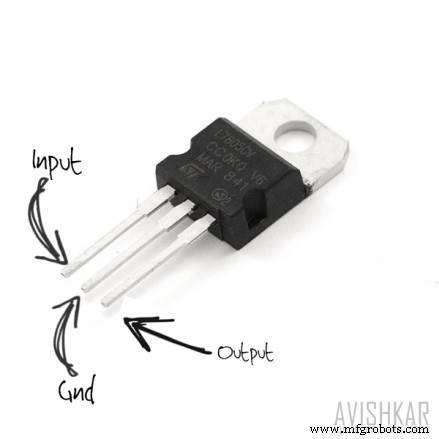
- IC 7805 qui régule l'alimentation 12 V à 5 V (si vous ne pouvez pas obtenir une alimentation 12 V, vous pouvez utiliser une alimentation 9 V)
- Condensateur 0,1 uf et 470 uf
- Résistance 1k pour la LED d'état
REMARQUE : Utilisez un dissipateur thermique pour 7805 car nous laissons tomber 7V (12-5 ) donc beaucoup de chaleur sera produite pour brûler le régulateur, donc l'utilisation d'un dissipateur thermique est recommandée.
Commençons à fabriquer l'émetteur (à distance)
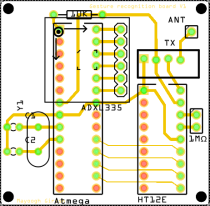
La section émetteur se compose d'un accéléromètre qui détecte le geste de la main et envoie les données à l'Arduino. Plus tard, Arduino envoie des données à l'encodeur IC conformément aux données reçues de l'accéléromètre et les données sont transmises au récepteur. Câblez selon le circuit ci-dessous :
REMARQUE : Veuillez noter que certains accéléromètres utilisent une alimentation de 3,3 V et peuvent être endommagés par 5 V. Consultez la documentation du fournisseur pour savoir quelle est la tension correcte.
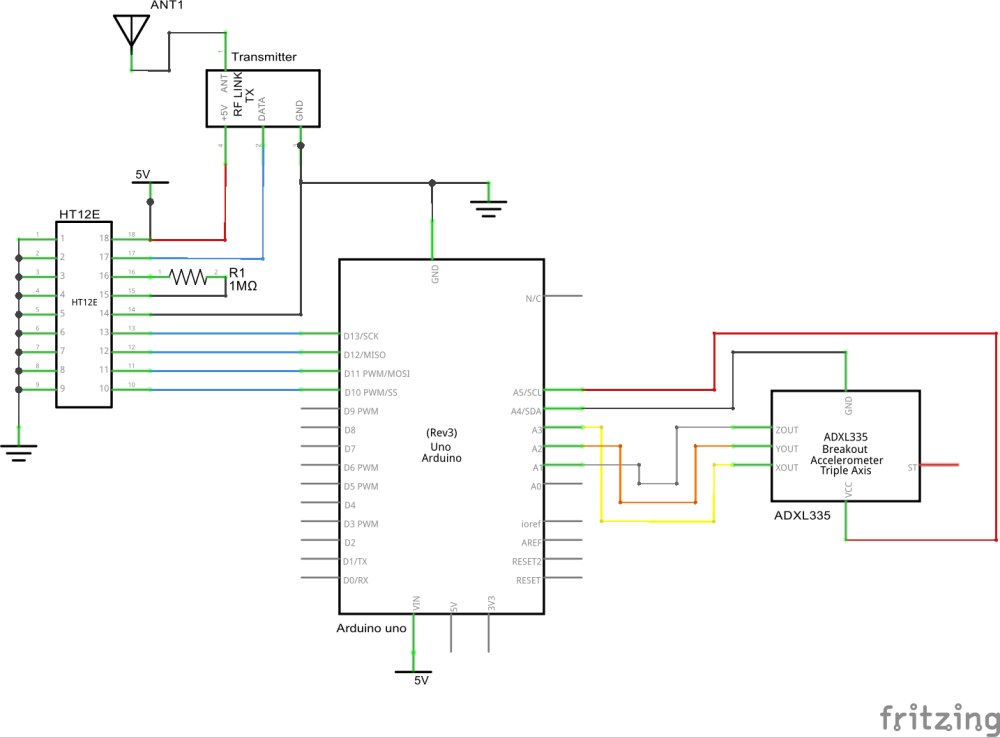
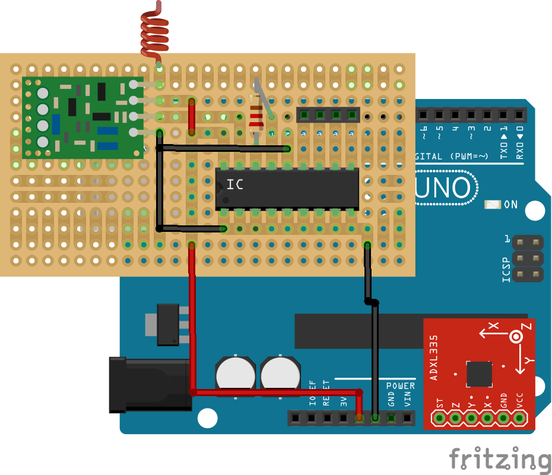
Ceci n'est qu'une illustration de l'émetteur :
Télécharger le code sur Arduino
Voici le code mis à jour
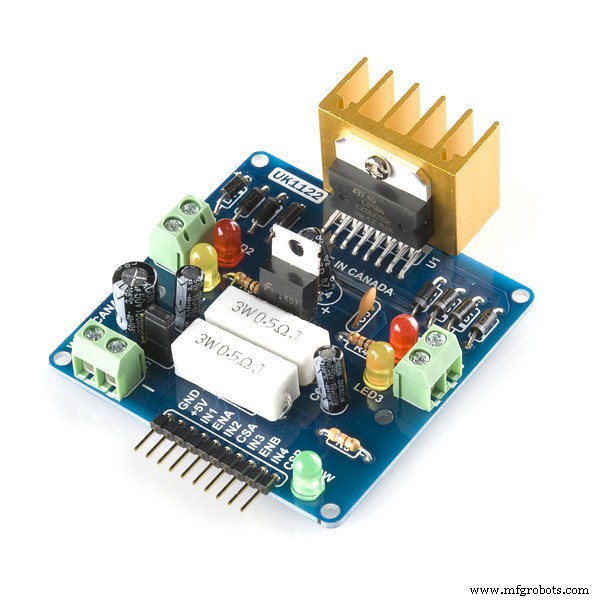
Faire le récepteur
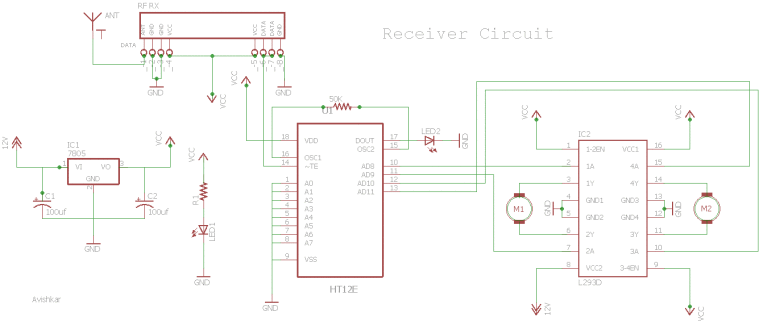
Le circuit récepteur se compose de 2 IC (décodeur HT12D, pilote de moteur L293D), module récepteur RF.
Câblez le circuit selon le schéma du récepteur ci-dessus. Il y a 2 LED dans la carte du récepteur, l'une s'allume lorsque l'alimentation est fournie au récepteur et l'autre lorsque l'alimentation est fournie au circuit émetteur. La LED près de l'IC HT12D devrait s'allumer et cela vous fournit une transmission valide (VT) lorsque l'alimentation est fournie à l'émetteur sinon il y a un problème avec votre connexion ou votre module RF-TX-RX.
Si vous souhaitez en savoir plus sur la section récepteur, veuillez lire cet article.
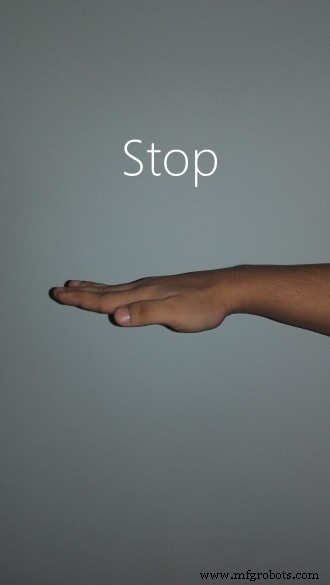
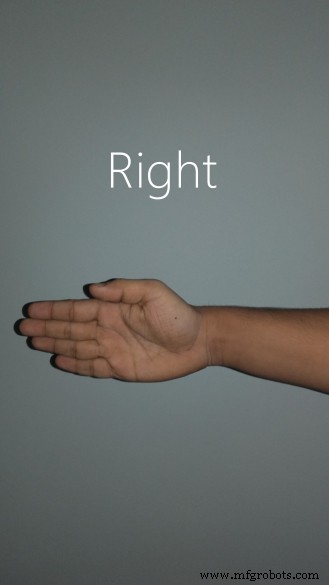
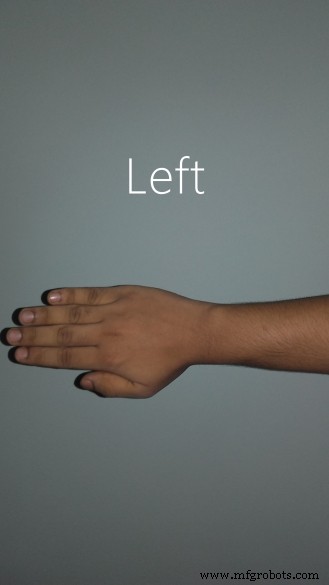
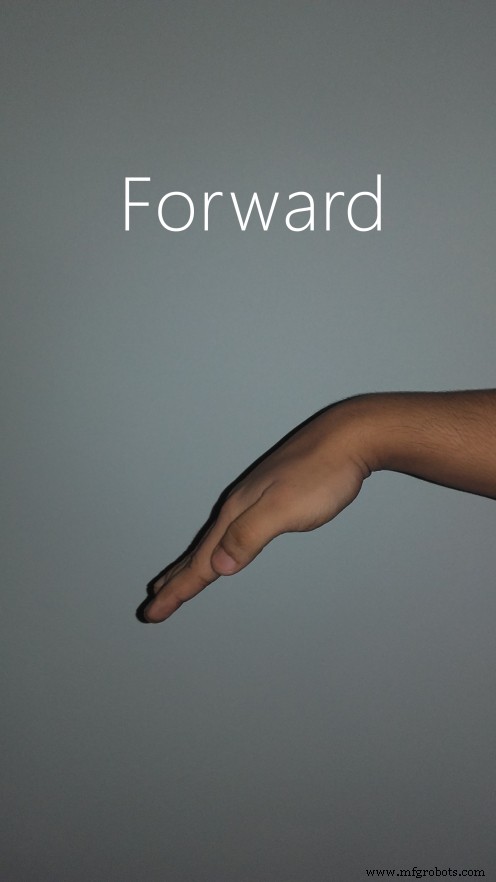
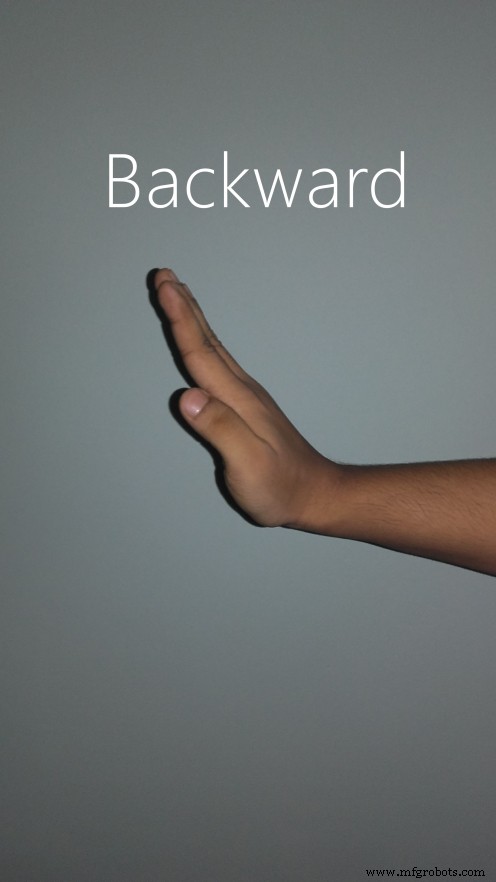
Quels gestes le robot reconnaîtra-t-il ?
Ce robot est conçu pour reconnaître cinq ensembles de gestes :avant, arrière, gauche, droite et arrêt. Vous aurez une meilleure idée si vous vérifiez les photos des gestes donnés ci-dessous.
Prendre plaisir à conduire votre robot.
Réduisez-le et rendez-le permanent.
Arduino Uno sera grand et encombrant sur votre main. Et si vous décidez de créer un autre projet à l'aide d'Arduino, vous devrez supprimer l'Arduino et toutes les connexions qui y sont établies, et vous perdrez votre ancien travail. Je n'aime pas faire ça, alors j'ai trouvé une solution pour en faire une solution permanente. Vous pouvez consulter cet article pour savoir comment réduire votre projet Arduino.
Téléchargez la disposition du PCB pour la version autonome à partir d'ici (miroir).
standalone_etch_copper_top_mirror1.pdf standalone_etch_copper_top1.pdfRegardez cette vidéo dans laquelle j'ai transféré le code vers le MCU Atmega8. Je n'ai montré que les sorties du MCU à l'aide de LED.
Consultez mon blog pour mes nouveaux projets
Si vous avez le moindre doute, laissez un commentaire ici. C'est mon blog. Je vérifierai régulièrement les commentaires là-bas plutôt qu'ici.
Processus de fabrication
- Robot Raspberry Pi contrôlé par Bluetooth
- Robot à commande gestuelle utilisant Raspberry Pi
- Windows 10 IoT Core :Robot à commande vocale
- Robot contrôlé par Wi-Fi utilisant Raspberry Pi
- ROObockey :robot de hockey de rue télécommandé et assisté
- Lumière de table interactive à commande gestuelle
- Contrôleur de jeu Arduino
- Bouteille d'eau alimentée par Arduino
- Robots de guidage manuel