


Tito - Robot Arduino UNO imprimé en 3D
Composants et fournitures
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 20 | |||
 |
| × | 1 | |||
 |
| × | 16 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 6 |
Outils et machines nécessaires
 |
| |||
 |
| |||
 |
|
Applications et services en ligne
 |
| |||
 |
| |||
 |
|
À propos de ce projet
Si vous n'avez pas ou est difficile d'obtenir la pièce, vous pouvez simplement acheter nos kits complets !
Visite www.ottodiy.com
Tito est un robot DIY dansant Bi-ped, dérivé de Zowi et Bob. Fondamentalement, a été adapté à une carte Arduino UNO standard avec des connexions et des supports plus faciles. C'était la première itération pour Otto DIY

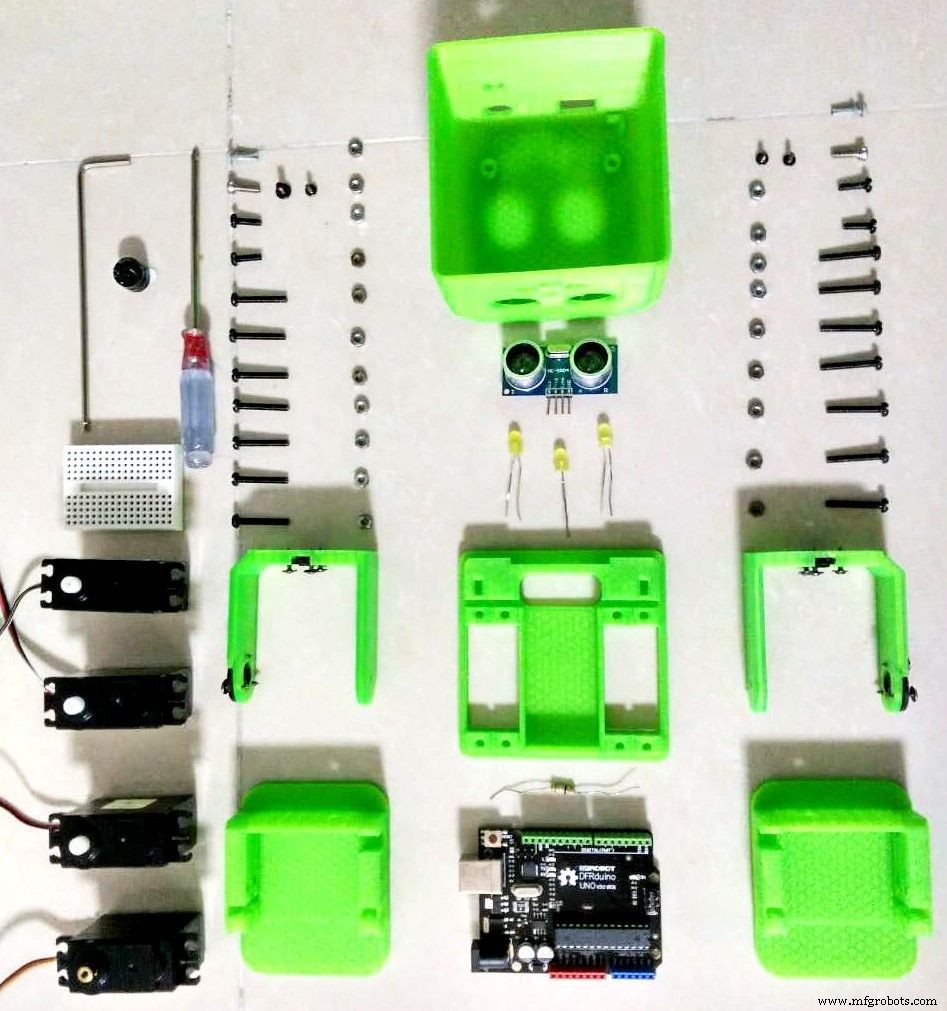
Outils et matériaux
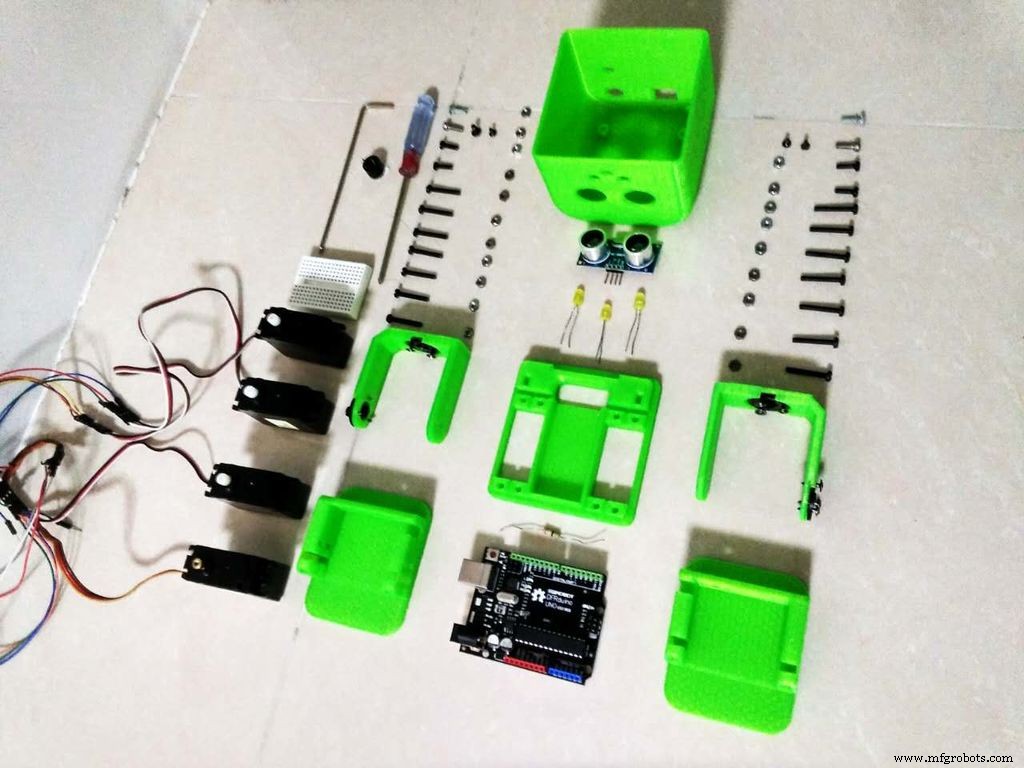
- Carte Arduino UNO ou compatible (dans mon cas un DFRduino UNO)
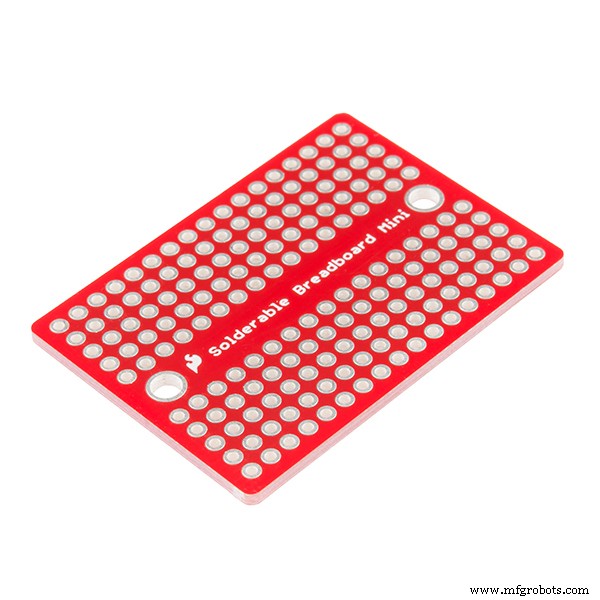
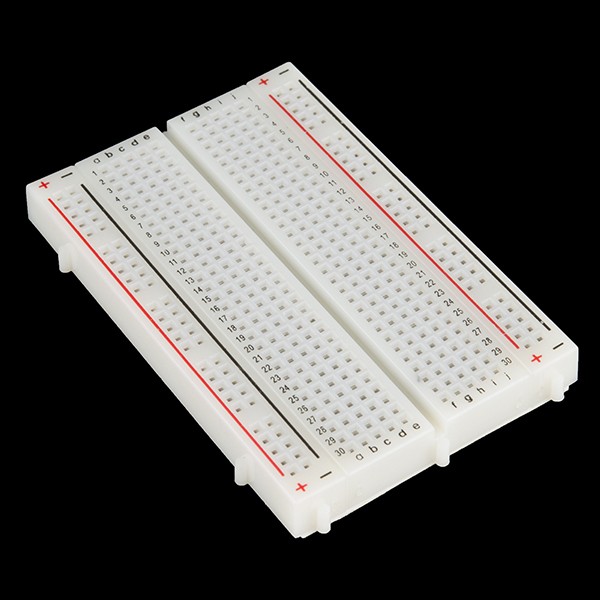
- Planche à pain nano
- Sonnerie
- Servo Futaba S3003 x4
- Capteur à ultrasons HC-SR04
- Powerbank (facultatif)
- Écrou M3 x20
- Vis M3 x20
- Tête imprimée en 3D
- Base imprimée en 3D
- Jambe x2 imprimée en 3D
- Pied R imprimé en 3D
- Pied L imprimé en 3D
Outils :
- Imprimante 3D
- Clé Allen
- Tournevis
Pièces d'impression 3D

Fichiers 3D.stl ici. Trouvez un moyen d'imprimer les pièces en 3D, elles sont conçues pour aucun support et sont donc très faciles à imprimer avec un remplissage de 20 % et une résolution de 0,2 mm. Étant donné que Tito est entièrement open source, vous pouvez trouver la conception des fichiers de modèle 3D réalisés dans Autodesk 123D Design ici :
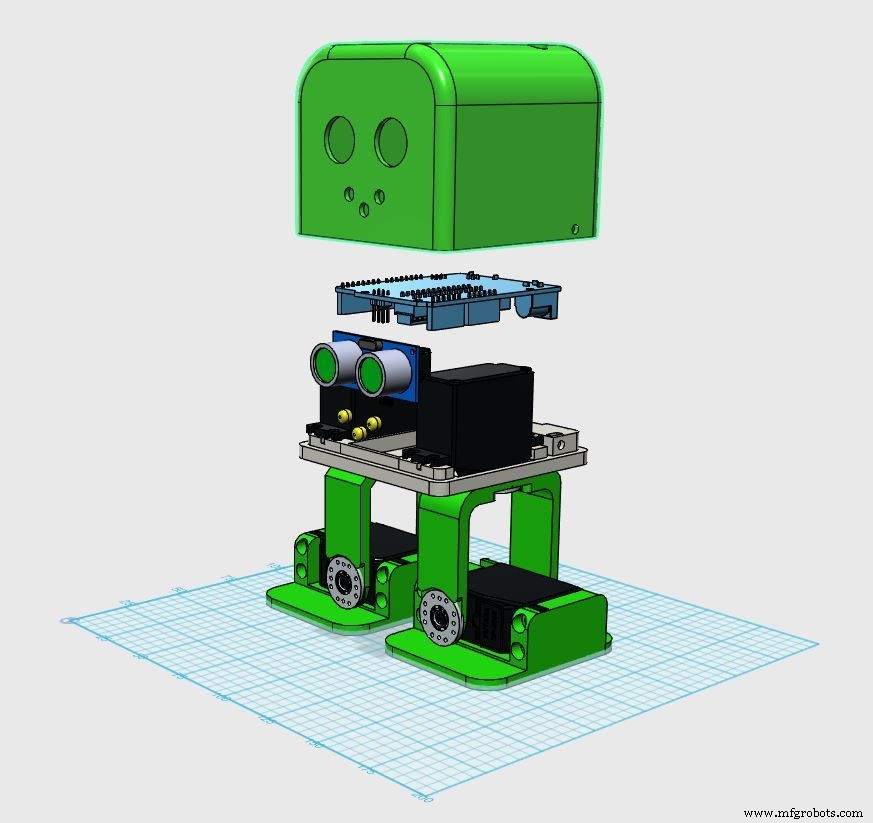
Pré-assembler
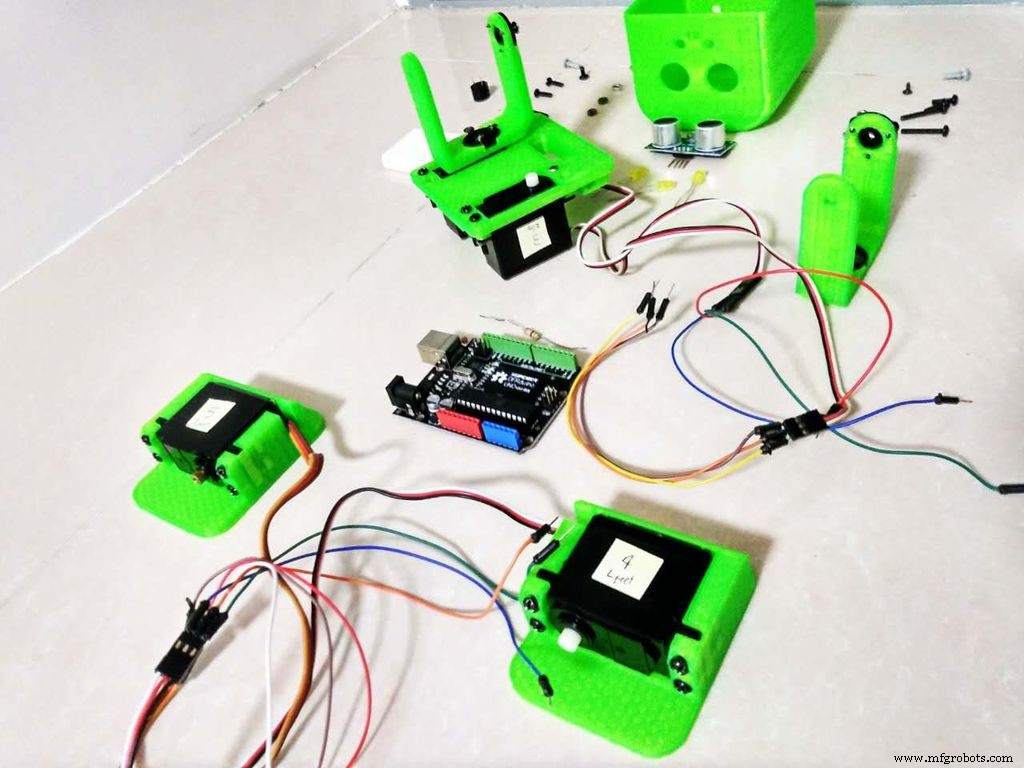
Il existe de nombreuses façons de construire Tito, mais une recommandation est la suivante :avant de connecter les servos, assemblez les pièces du disque servo aux pieds, puis placez les servos dans le corps et les pieds.
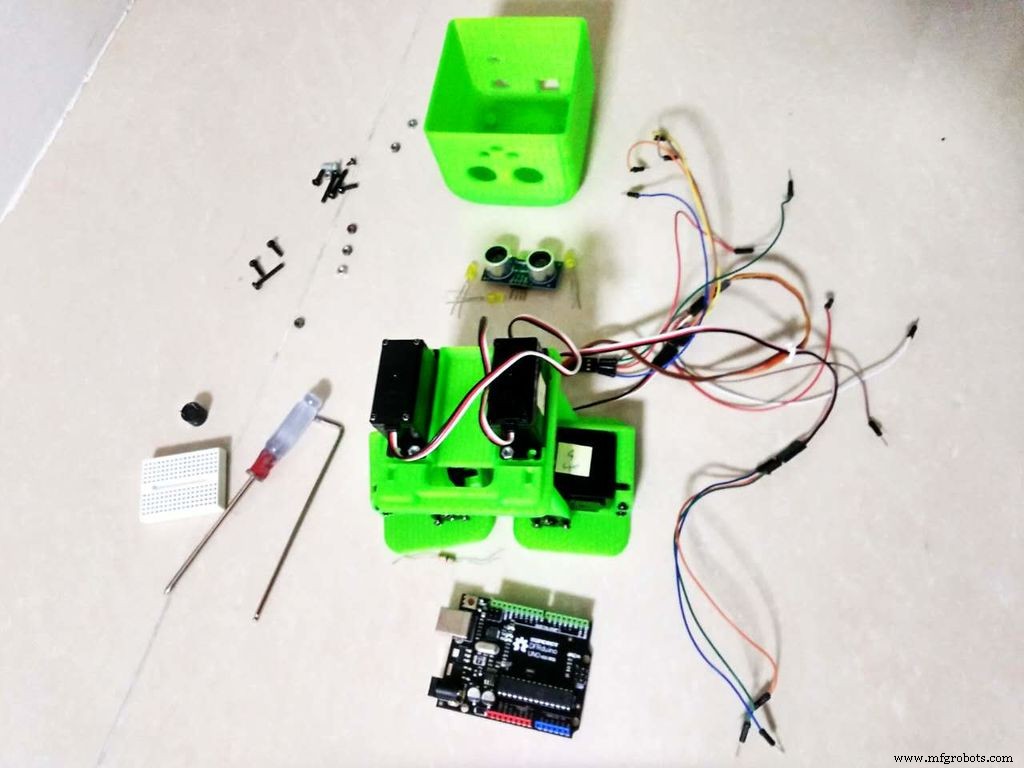
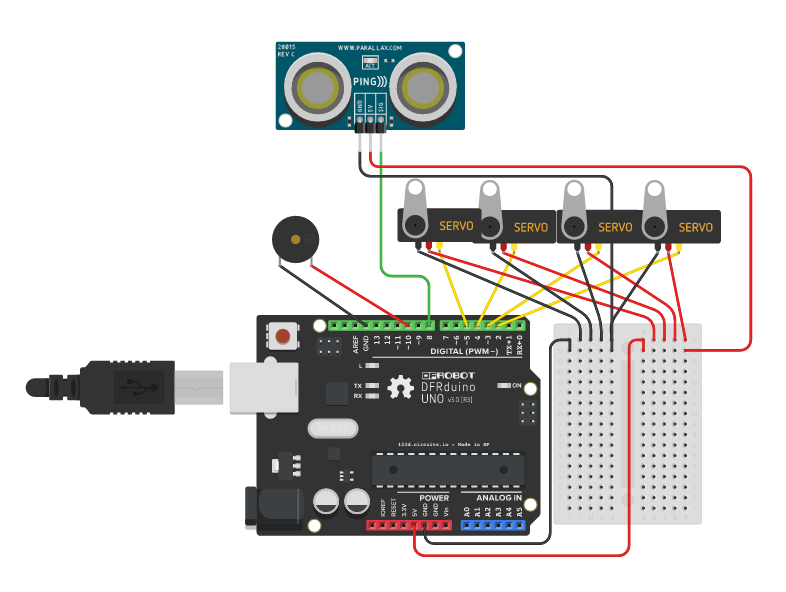
Le schéma
Suivez l'image pour les connexions. Capteur à ultrasons HC-SR04 (trig pour la broche 8 et écho pour la broche 9). Pendant le processus de création, vous devrez peut-être vous déconnecter et vous connecter constamment, alors gardez simplement ce schéma présent pour d'autres corrections.
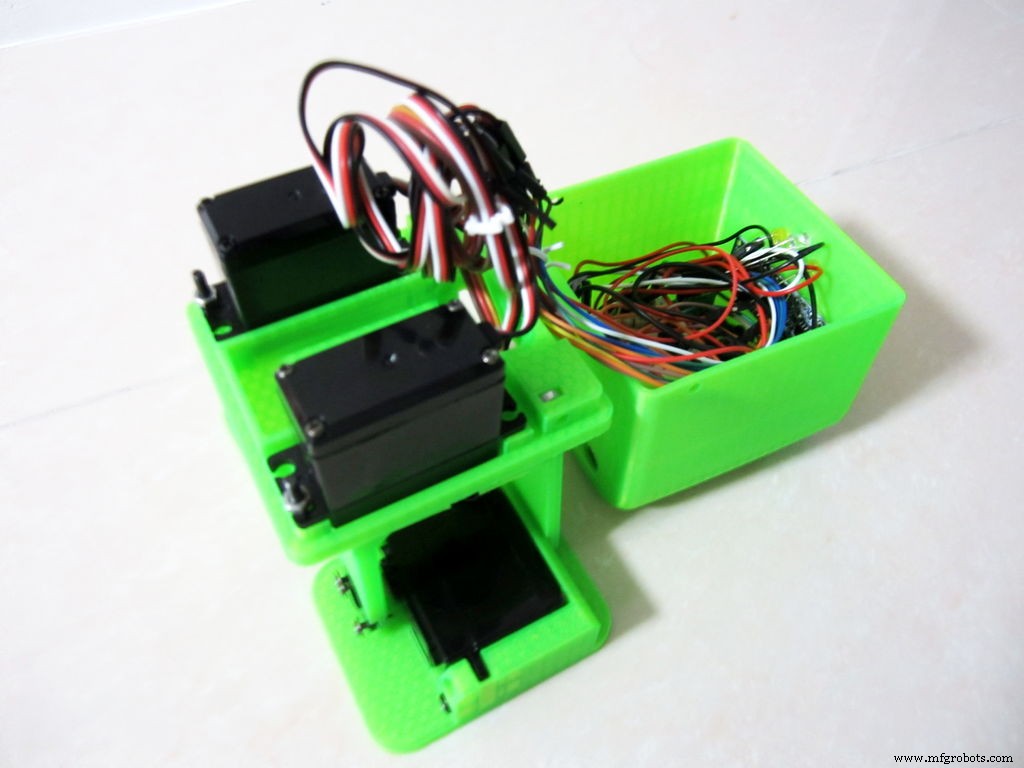
Testez la position des Servos

Sur la photo, les câbles sont déconnectés mais l'idée ici est de télécharger un code sur la carte Arduino UNO qui mettra tous les servos à 90 degrés. Faites ensuite correspondre le bon angle pour les disques de manivelle dans le corps et les pieds. Tito devrait être dans une position comme celle de la photo. Ensuite, vous pouvez fixer tous les servos avec l'axe à vis.
Assemblez la carte Arduino UNO
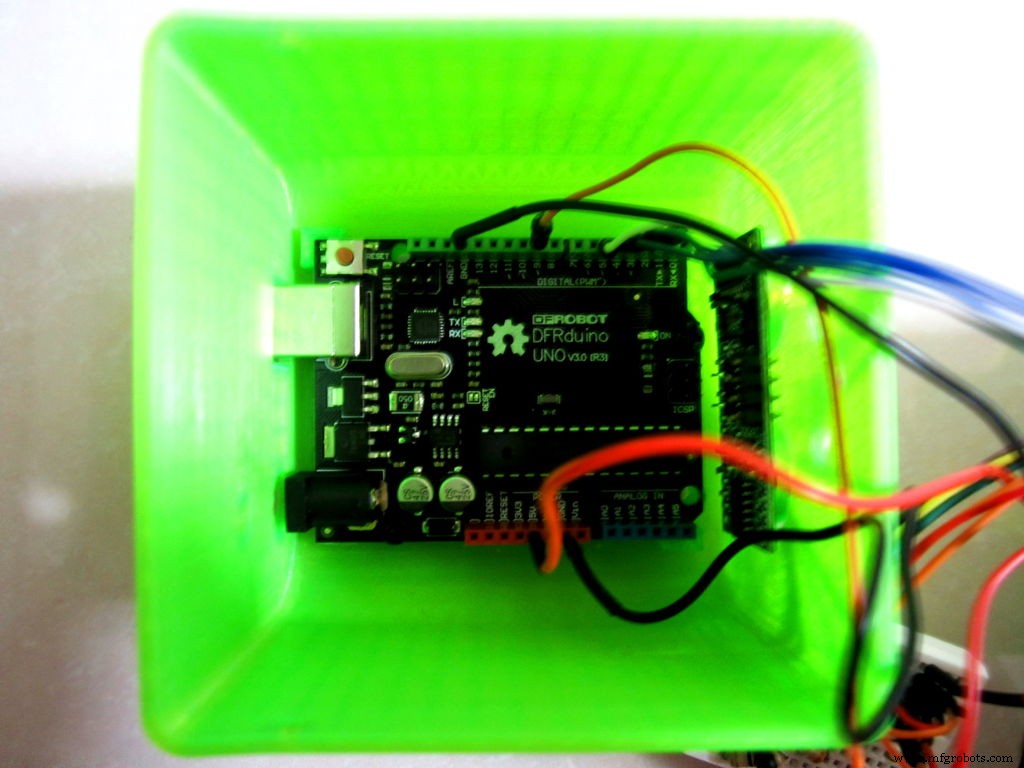
Cette conception permet de fixer facilement n'importe quelle carte compatible Arduino Uno (dans mon cas, un DFRduino UNO) dans la partie tête, vous pouvez utiliser jusqu'à 4 vis.
Assemblage final
Si toutes les connexions sont sécurisées, vous pouvez fermer la partie tête et la fixer au corps à l'aide des vis latérales.
Programmation IDE Arduino


Toutes les bibliothèques et codes d'esquisse se trouvent dans ce référentiel Github. Connectez simplement votre câble USB à Arduino UNO et téléchargez les codes. Il existe de nombreux mouvements programmés pour le robot, comme marcher dans différentes directions, ultrasons, lever, incliner et danser.
postez votre remix et vos modifications dans la communauté hackster ou Thingiverse
ottodiy.com
Code
Github
https://github.com/OttoDIY/OttoDIYPièces et boîtiers personnalisés
Thingverse
Fichier CAO sur thingverse.comSchémas
Processus de fabrication