


Robot de prélèvement et de placement contrôlé par Bluetooth
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Outils et machines nécessaires
 |
|
Applications et services en ligne
 |
| |||
 |
|
À propos de ce projet
Présentation
Ce tutoriel montre comment construire un robot pick and place contrôlé avec votre smartphone Android. Nous avons construit une application mobile en utilisant la plate-forme MIT App Inventor. Dans ce tutoriel, nous allons parler de chaque partie de ce projet séparément. Nous parlerons de :
- 1 Comment contrôler un servomoteur
- 2 Comment contrôler un moteur à courant continu
- 3 Comment utiliser le module Bluetooth
- 4 Comment contrôler votre robot avec votre téléphone portable
J'espère donc que ce tutoriel couvrira tous vos besoins pour créer votre bot.
Le scénario
Tout d'abord, il faut savoir comment le robot va prendre les commandes. Nous utilisons un module Bluetooth qui sera connecté à une application mobile, que nous construirons par la suite. Pour l'instant, nous devons savoir que nous enverrons notre commande au robot avec notre mobile en utilisant la connexion Bluetooth.

Matériel
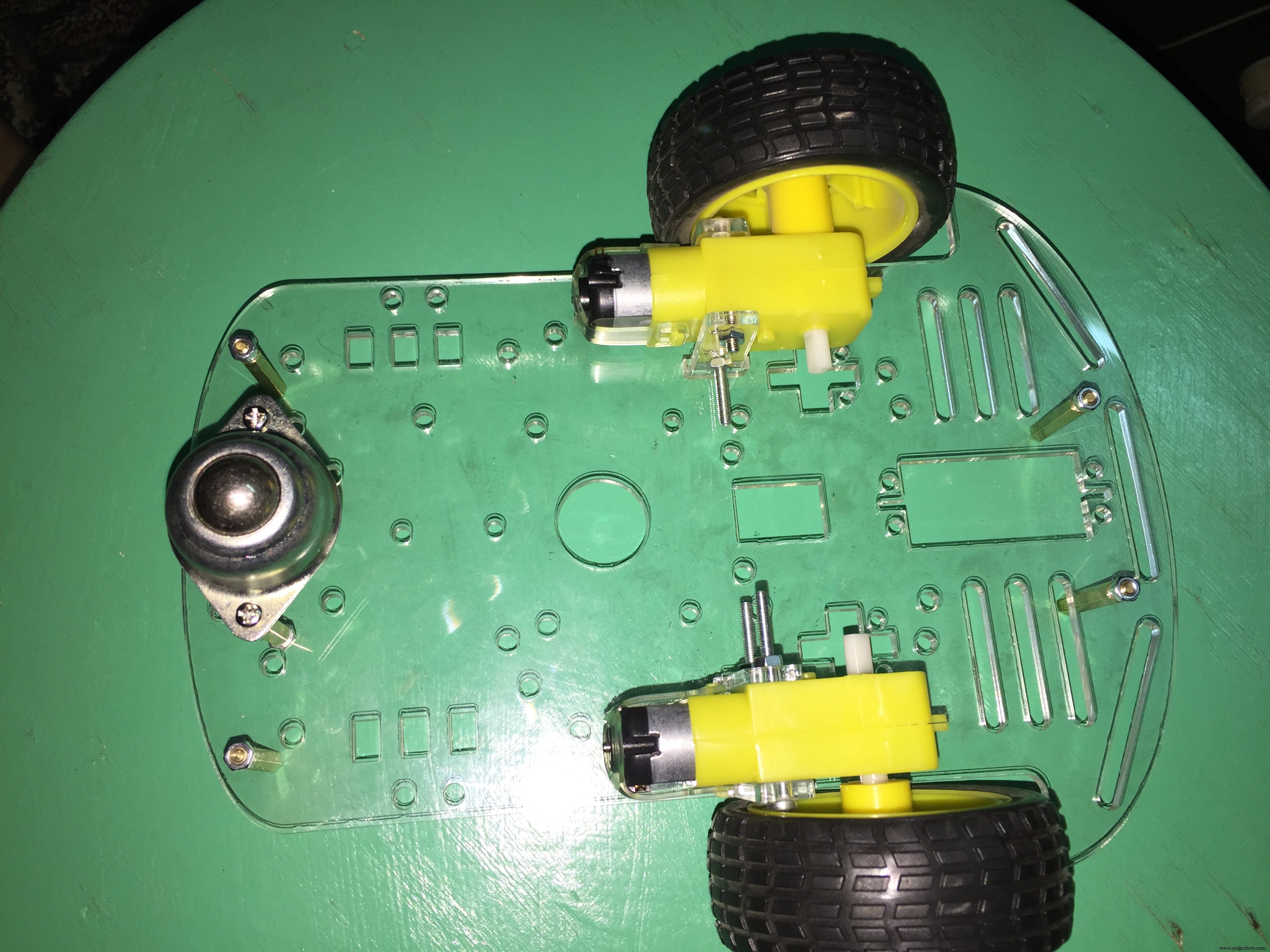
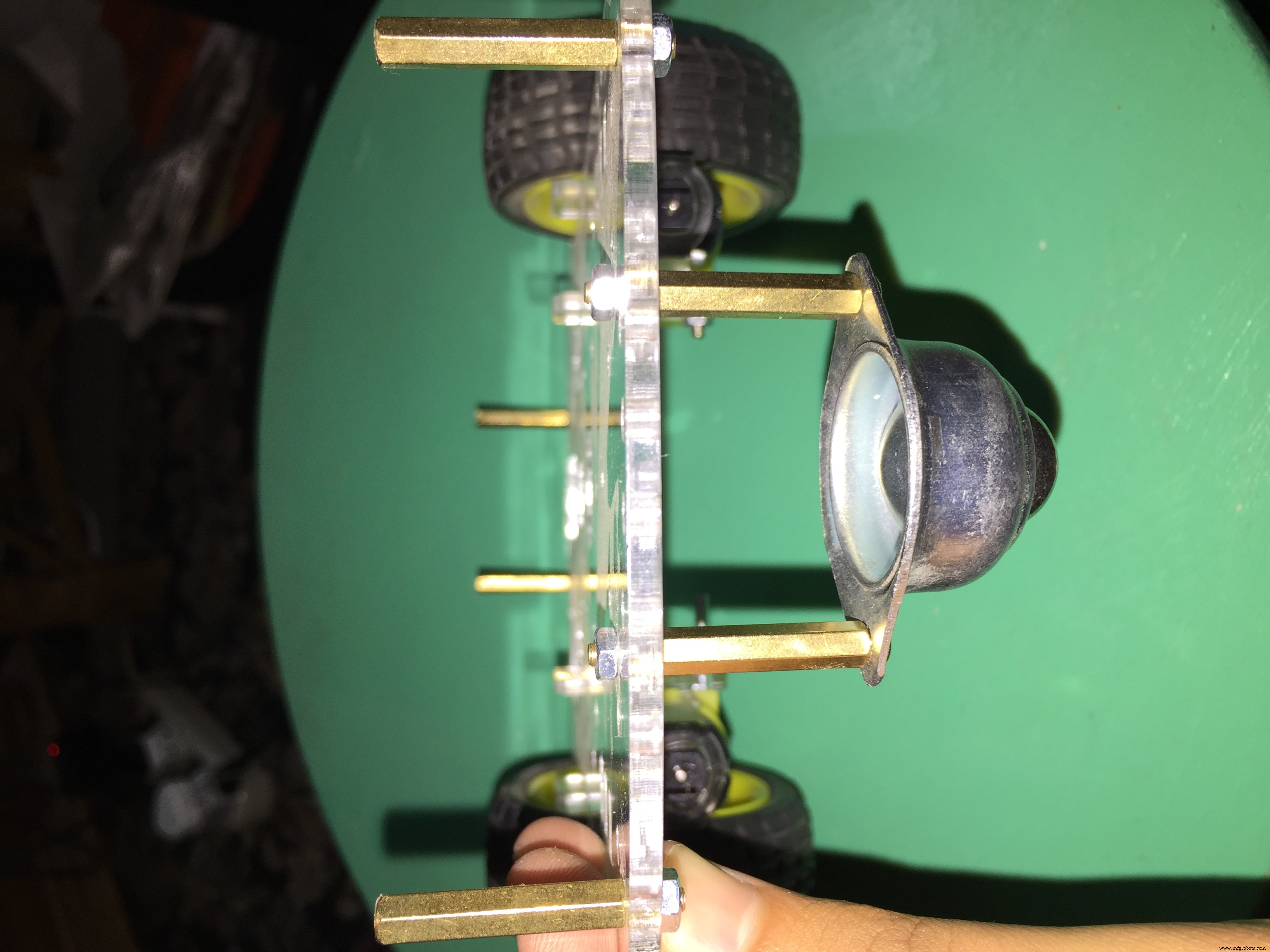
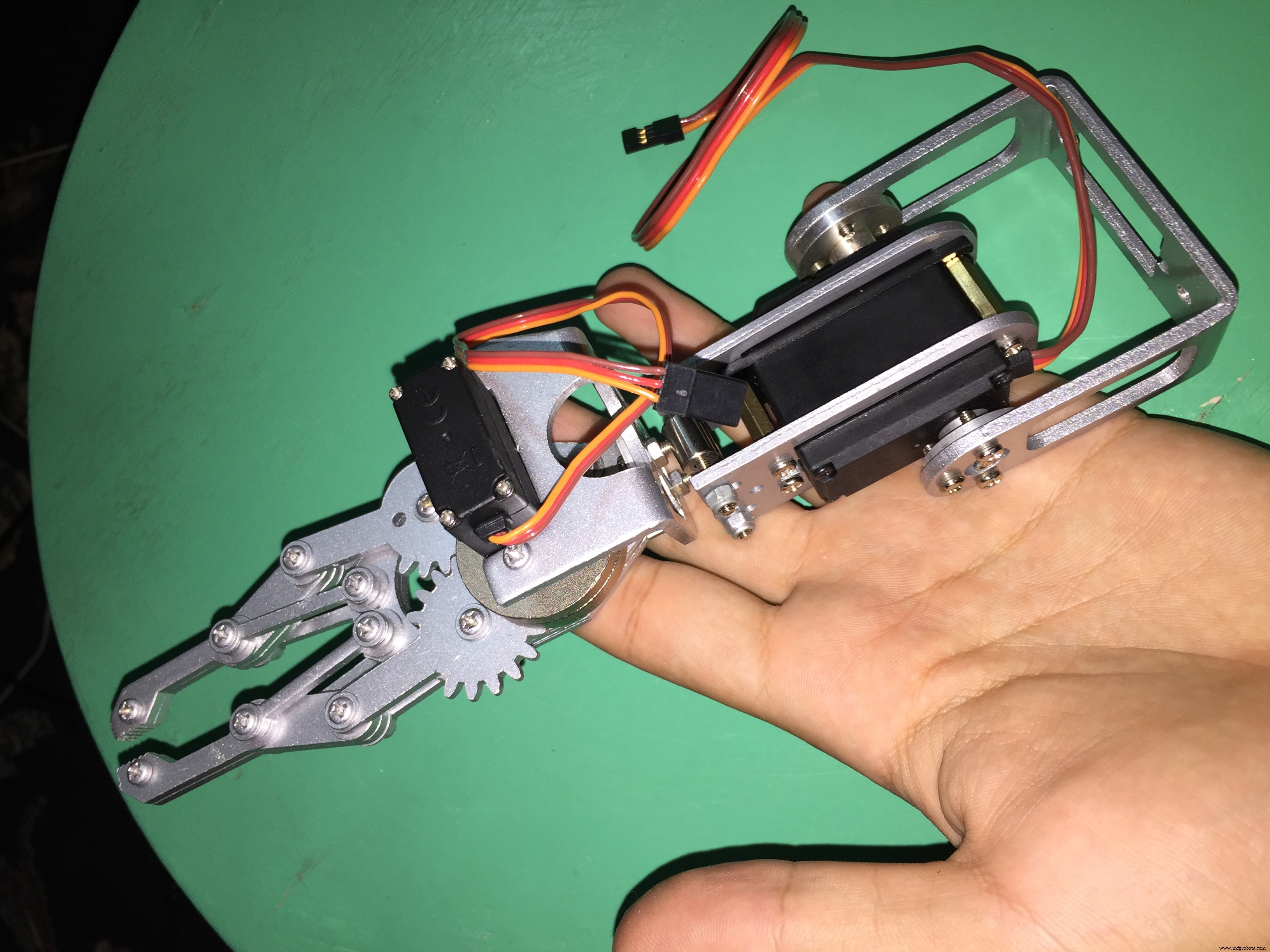
- Le kit nécessite un assemblage simple, mais cela prend un certain temps. Suivez les instructions fournies avec votre kit pour l'assemblage,
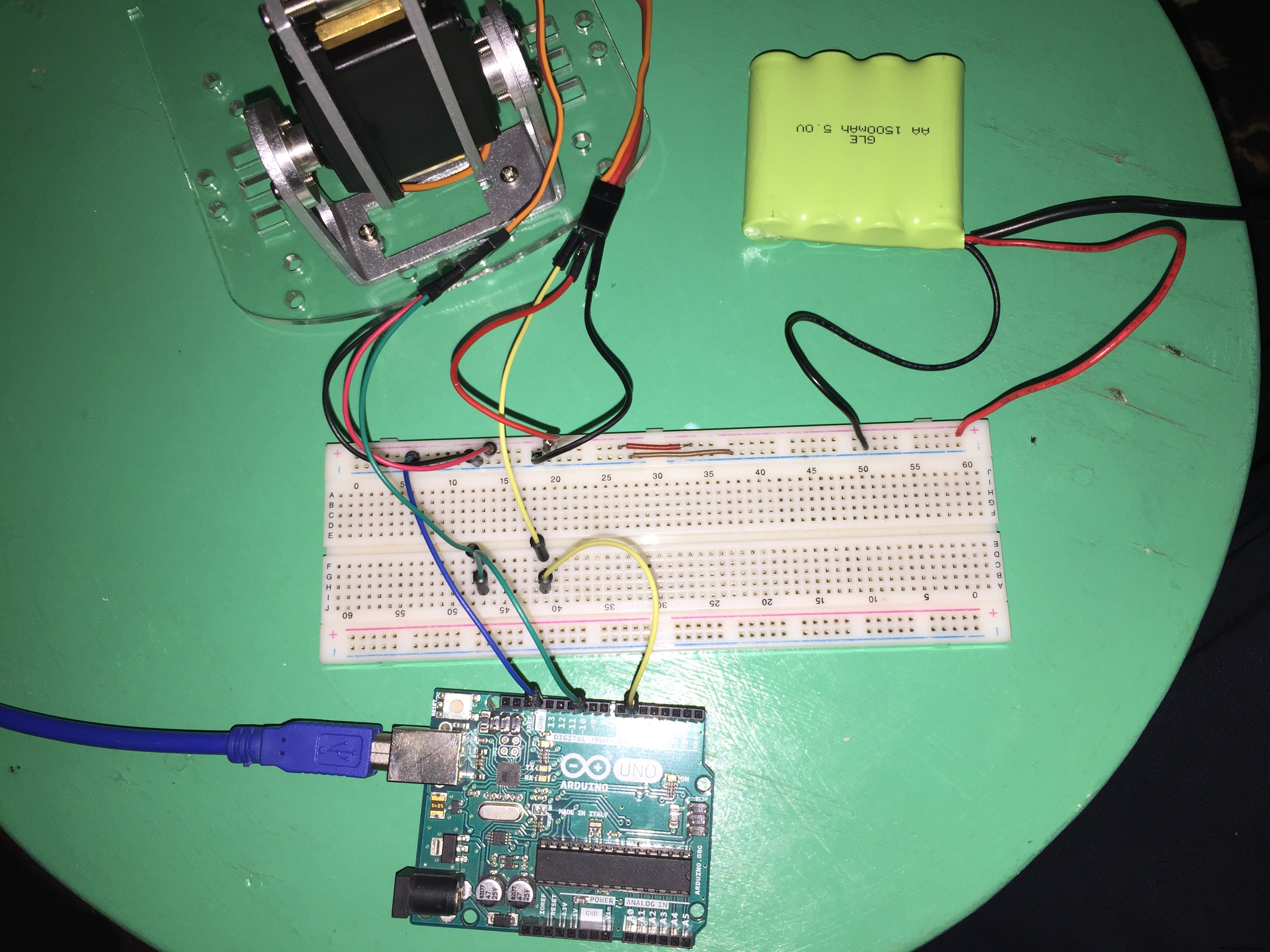
À la fin de l'assemblage, cela devrait ressembler à ceci :
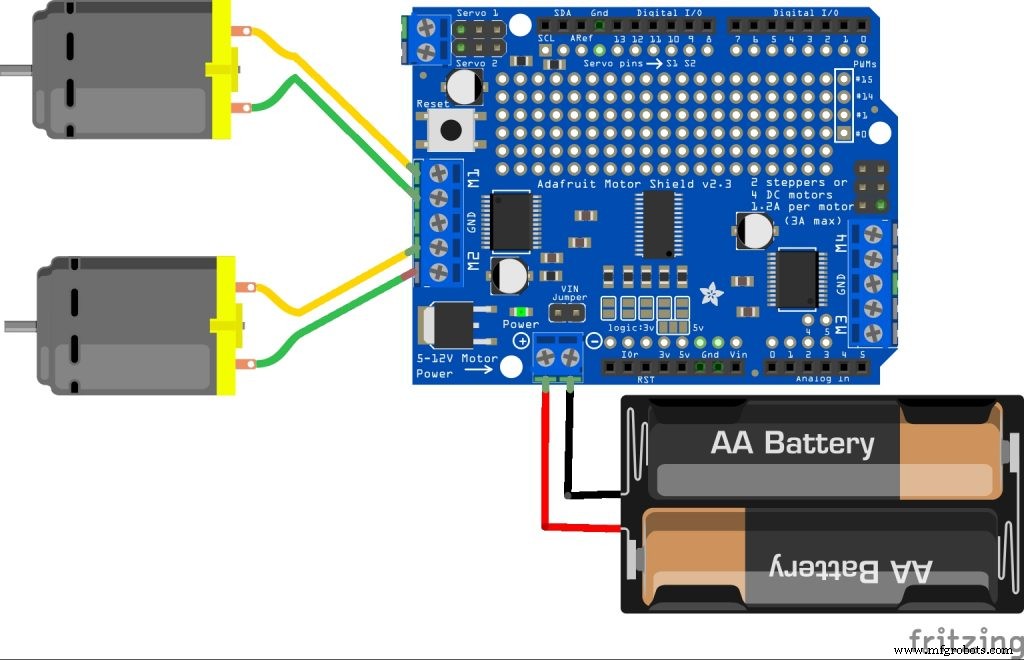
Le Motor Shield vous permet de parler avec vos moteurs. Si vous connectez les moteurs directement à la carte Arduino, cela déclenchera un incendie ! parce que chaque moteur a besoin d'au moins 80MA mais le courant maximum que la broche numérique Arduino peut fournir est de 40MA, donc NE PAS essayez de connecter le moteur directement à votre carte Arduino.
- Le bouclier moteur vous aide à contrôler la direction de votre moteur (par exemple, avancer, reculer et relâcher).
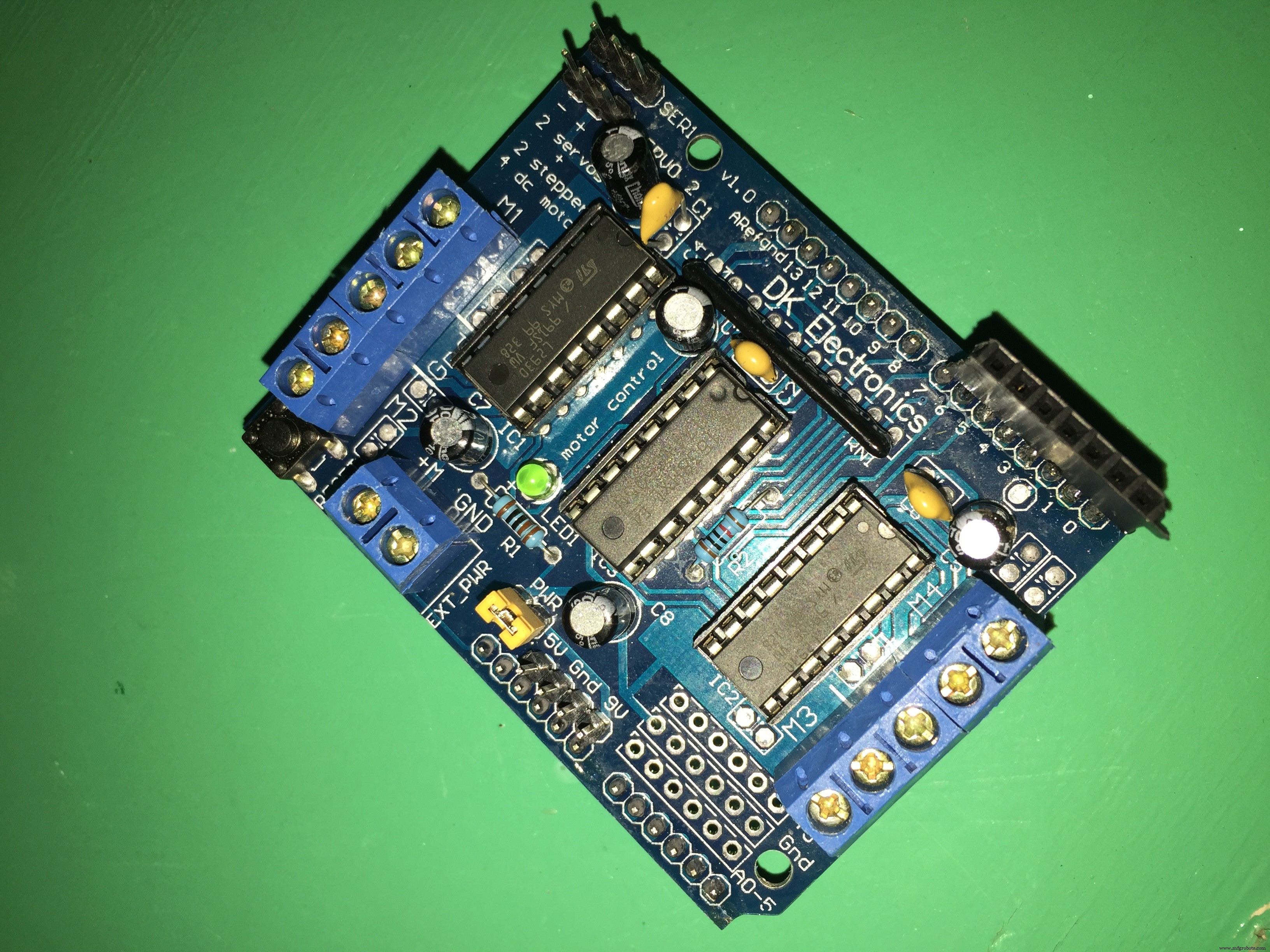
- Le bouclier moteur vous permet de contrôler jusqu'à 4 CC bidirectionnels moteurs avec sélection individuelle de la vitesse de 8 bits (donc, environ 0,5 % de résolution).
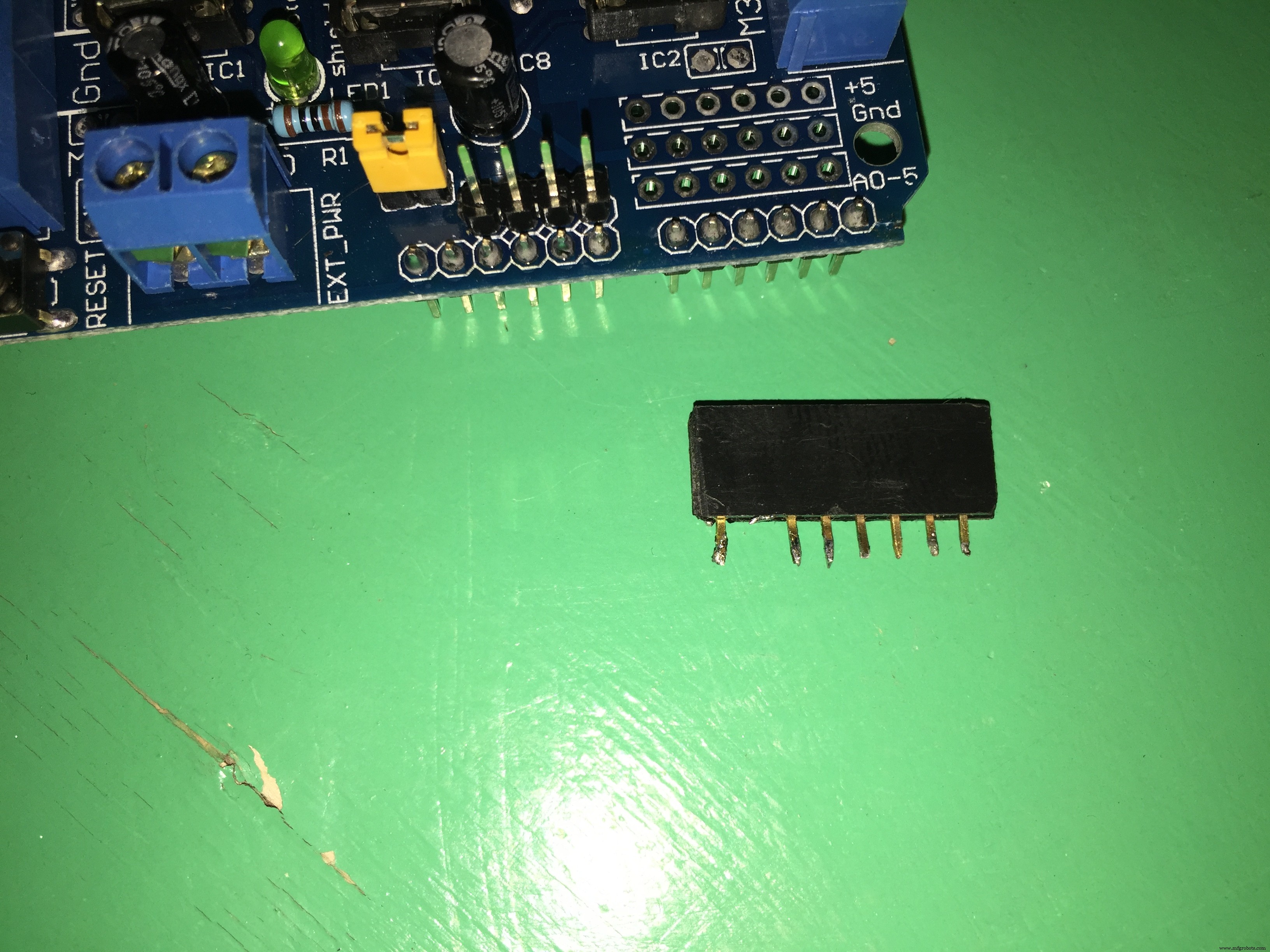
Vous pouvez souder des en-têtes de broches sur le dessus du blindage pour pouvoir utiliser les broches Arduino.

Vous devez coller votre shield moteur au dessus de votre carte Arduino comme ceci :
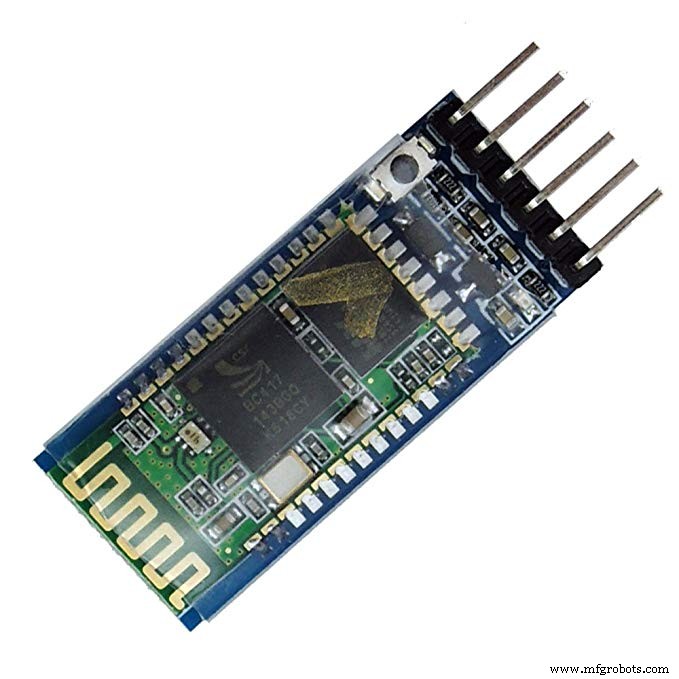
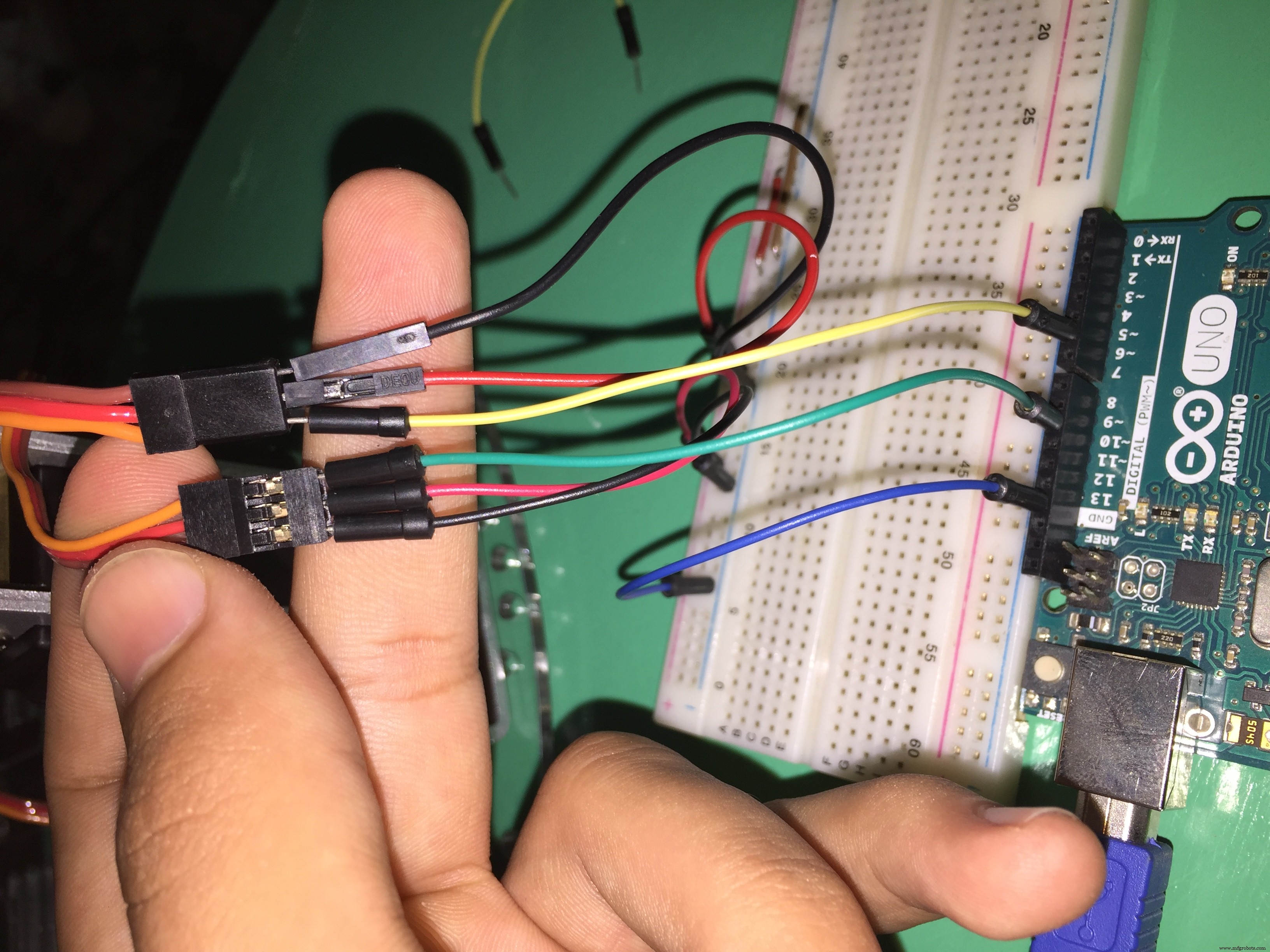
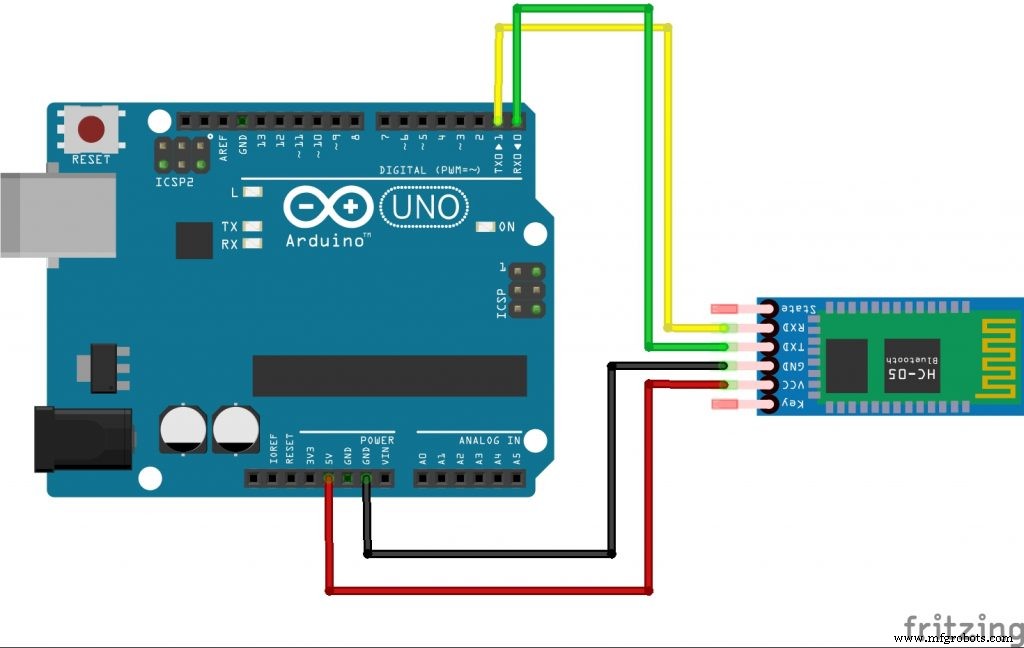
Le module Bluetooth :c'est le canal entre le pilote et le robot pour envoyer des ordres et prendre des mesures.
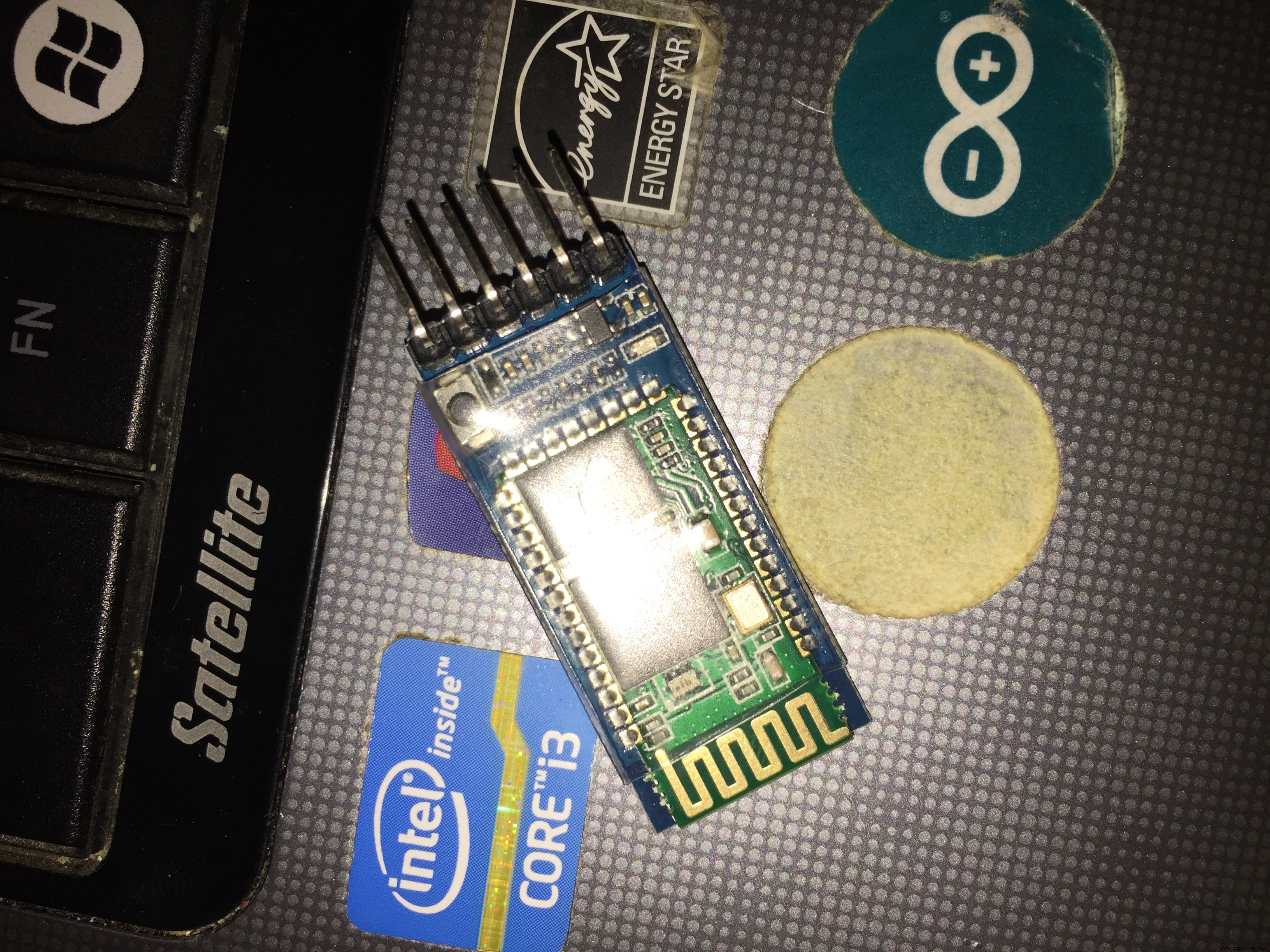
Il a 6 broches; nous n'utiliserons que les quatre broches du milieu (RX-TX-GND-+5) :

Nous allons nous connecter :
- +5 sur le module Bluetooth au 5v sur l'Arduino
- GND sur le module Bluetooth au GND sur l'Arduino
- Rx sur le module Bluetooth au Tx sur l'Arduino
- Tx sur le module Bluetooth au Rx sur l'Arduino

REMARQUE :POURQUOI Rx à Tx et Tx à Rx ?
Parce que le module Bluetooth envoie des données (Tx) et l'Arduino reçoit ces données (Rx).
L'un envoie et l'autre reçoit
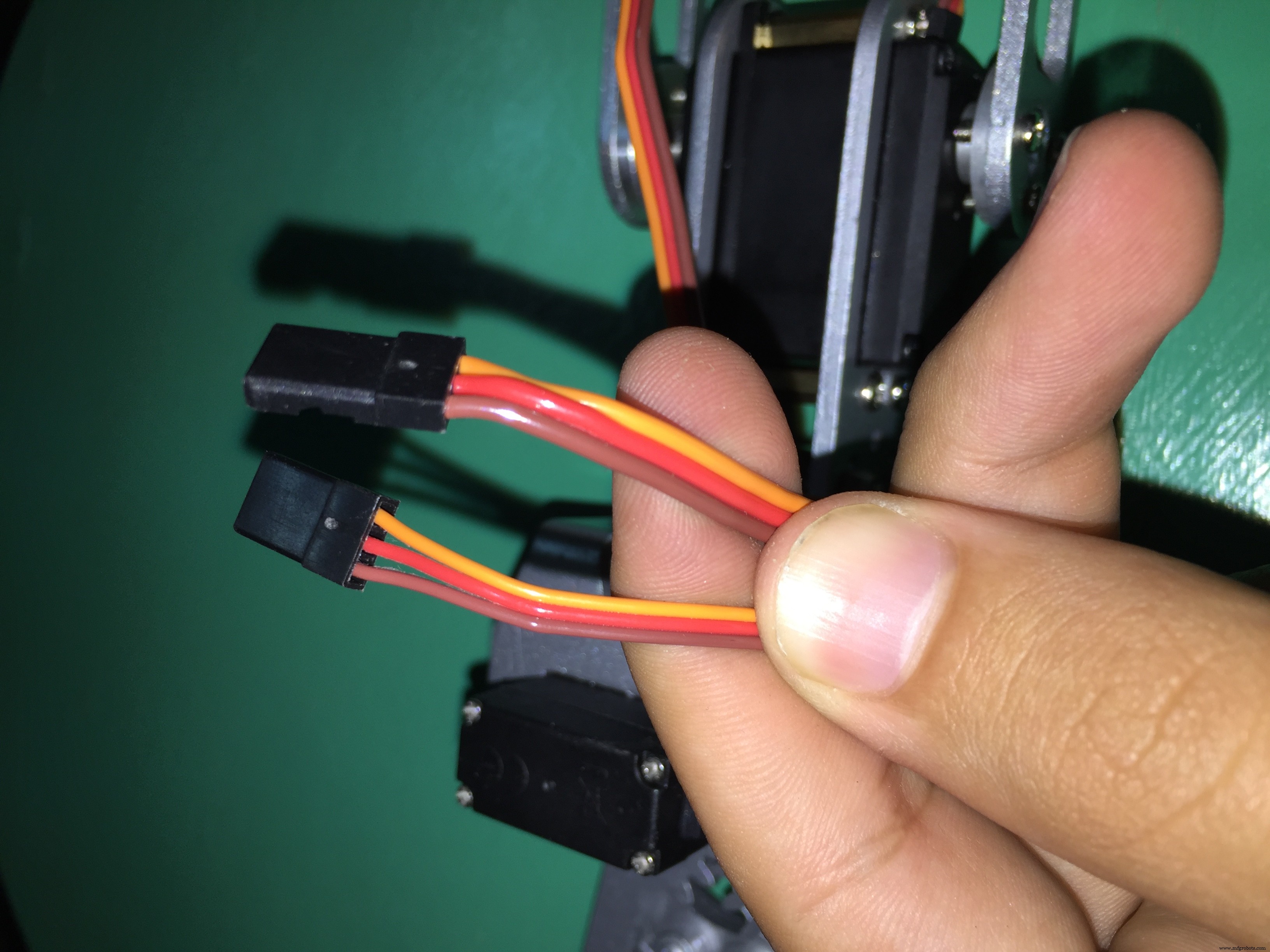
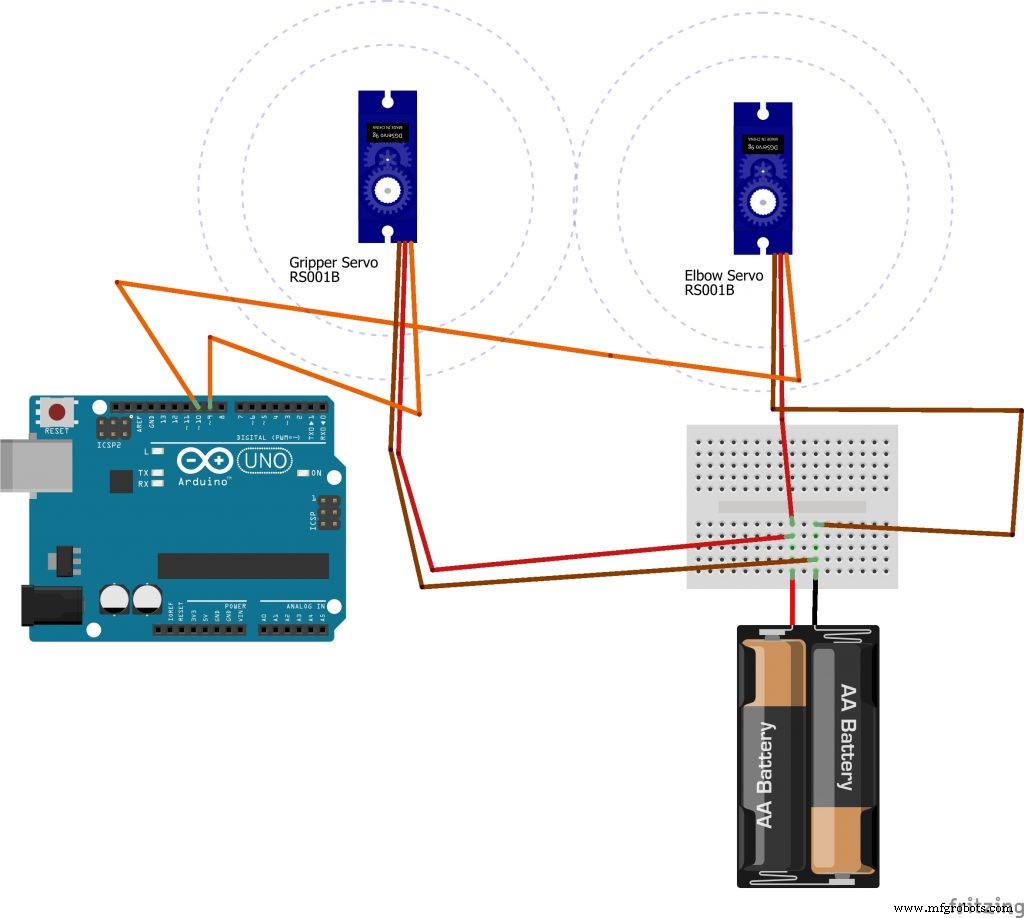
4) Le servomoteur a 3 fils :rouge (positif), marron (négatif), jaune ou orange (signal).
Remarque :À FAIRE NE PAS connecter le positif et le négatif des servomoteurs aux 5V et GND de la carte Arduino. La carte Arduino sera allumer un feu en raison du courant élevé absorbé par les moteurs ; utiliser le batterie externe.
- Le fil rouge vers le positif de la batterie externe
- Le fil marron vers le négatif de la batterie externe
- Le fil orange vers n'importe quelle broche numérique (PWN) sur l'Arduino
REMARQUE :n'oubliez pas de mettre le GND de la batterie et le GND de l'Arduino en commun, faites-le en connectant chaque GND l'un à l'autre.
5) Les moteurs à courant continu
Vous devez souder des fils sur les bornes du moteur pour pouvoir utiliser ces moteurs.
Le moteur à courant continu n'a pas de polarité. Il n'y a ni Positif ni Négatif. Si vous inversez les connexions de votre moteur, le sens de déplacement du moteur changera.

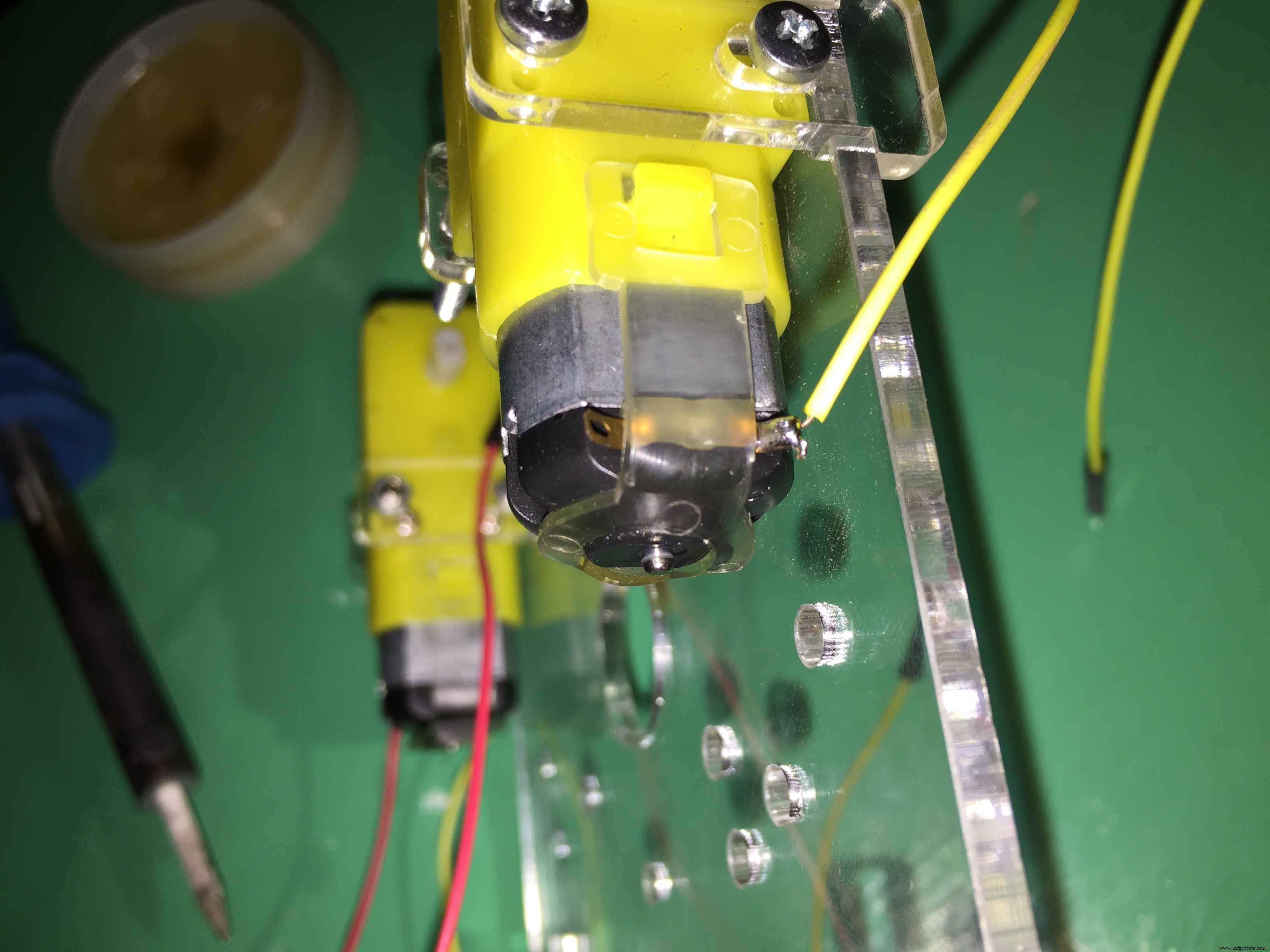
Après avoir soudé les bornes du moteur, connectez ces bornes au blindage du moteur.

REMARQUE :Dans tle code Arduino, je Moteur 1 et Moteur 2 d'occasion - pas le moteur 3 et le moteur 4.
Le schéma
Comment connecter les moteurs du robot et la batterie avec le pilote de moteur.
Comment connecter les servomoteurs Arm et la batterie avec la carte Arduino.
Comment connecter le module Bluetooth avec la carte Arduino.
REMARQUE :déconnectez (retirez le FIL ROUGE + 5 broches) le module Bluetooth tout en téléchargeant le code sur la carte Arduino. Ensuite, reconnectez-le une fois le processus de téléchargement terminé.
Code
- Choisir et placer le code Arduino du robot
Choisir et placer le code Arduino du robotArduino
#include#include AF_DCMotor motorR(1);AF_DCMotor motorL(2);Servo coudeServo;Servo pincerServo;int command;void setup() {gripperServo.attach(9); coudeServo.attach(10);Serial.begin(9600);motorR.setSpeed(255);motorL.setSpeed(255);}void loop() {command =Serial.read(); /* Code ARM */if(command>=1 &&command <=180) //le servo du coude se déplace en fonction de la position du pouce sur l'application mob entre 0 -- 180 .{ elbowServo.write(command);}else if ( commande ==205) //La pince se déplace vers l'angle 0{ pincerServo.write(0);}else if (commande ==206) //La pince se déplace vers l'angle 90{ pincerServo.write(90); }else if (commande ==207) //la pince se déplace à l'angle 180{ pincerServo.write(180);} /* CAR CODE */ else if (commande ==200){ motorR.run(FORWARD); motorL.run(FORWARD);}else if(commande ==201){ motorR.run(FORWARD); motorL.run(BACKWARD); } else if(commande ==202){ motorR.run(RELEASE); motorL.run(RELEASE); } else if(commande ==203){ motorR.run(BACKWARD); motorL.run(FORWARD); } else if(commande ==204){ motorR.run(BACKWARD); motorL.run(BACKWARD); } else if(commande ==0){ motorR.run(RELEASE); motorL.run(RELEASE); }}
Schémas
Cette application ne fonctionne que sur les téléphones Android.Vous devez activer le Bluetooth avant d'utiliser cette application
avant de choisir le module Bluetooth dans l'application, associez votre mobile au module Bluetooth à partir des paramètres de votre téléphone ieee_aast_aswan_test1_xVVlPTtt8n.apk
Processus de fabrication
- Robot Raspberry Pi contrôlé par Bluetooth
- Créez votre robot de streaming vidéo contrôlé par Internet avec Arduino et Raspberry Pi
- Robot contrôlé par Wi-Fi utilisant Raspberry Pi
- Impression 3D de pinces d'injecteur de carburant personnalisées pour un robot Pick and Place
- Fabricants de robots Pick and Place en Inde
- Comment fonctionnent les robots de prélèvement et de placement
- Pick and place - un parfait exemple d'utilisation de robot avec EasyWork
- Robots et fabrication de batteries :un lien positif
- Outillage d'extrémité de bras :Applications robotisées de sélection et de placement