


Conduite de la commande de moteur pas à pas 28BYJ-48 avec joystick
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
À propos de ce projet
Matériel requis :
- Carte Arduino UNO
- Moteur pas à pas 28BYJ-48 (avec carte pilote ULN2003A)
- Joystick
- Source d'alimentation 5 V
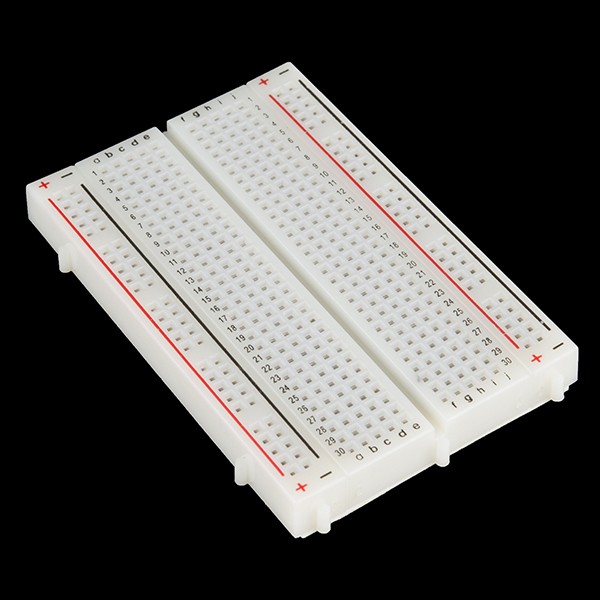
- Planche à pain
- Cavaliers
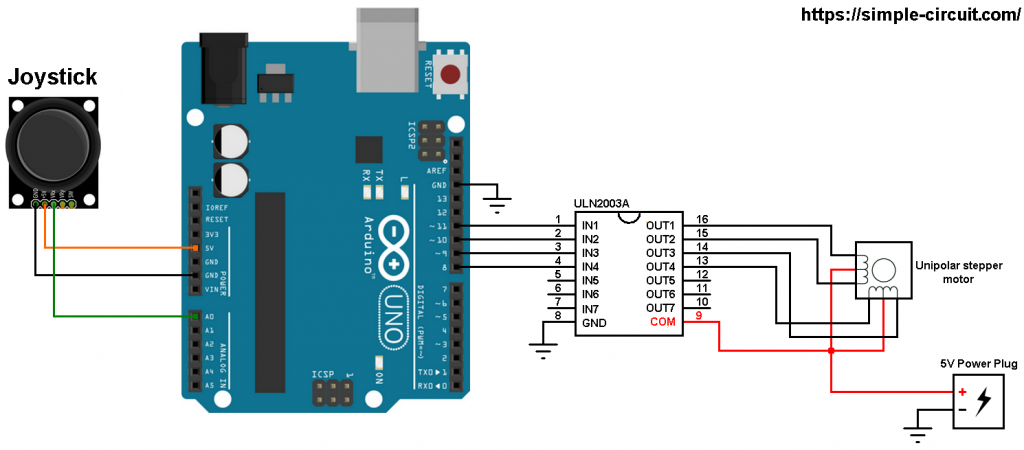
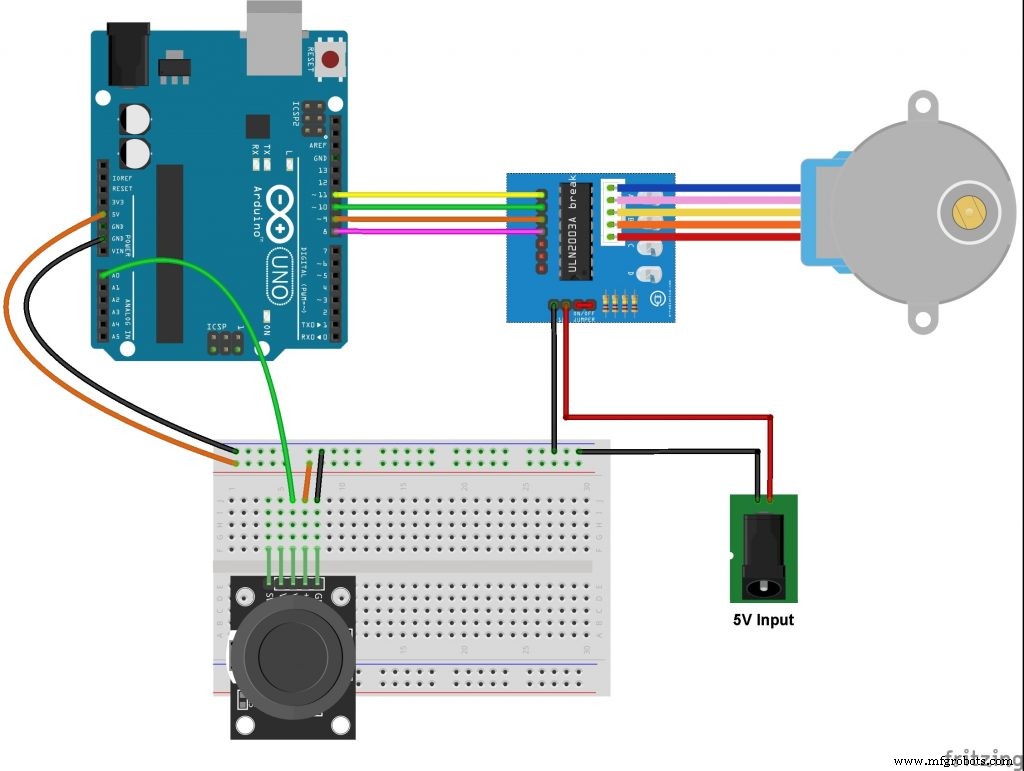
Commande de moteur pas à pas avec circuit Arduino et joystick :le schéma du circuit du projet est illustré ci-dessous (toutes les bornes mises à la terre sont connectées ensemble).
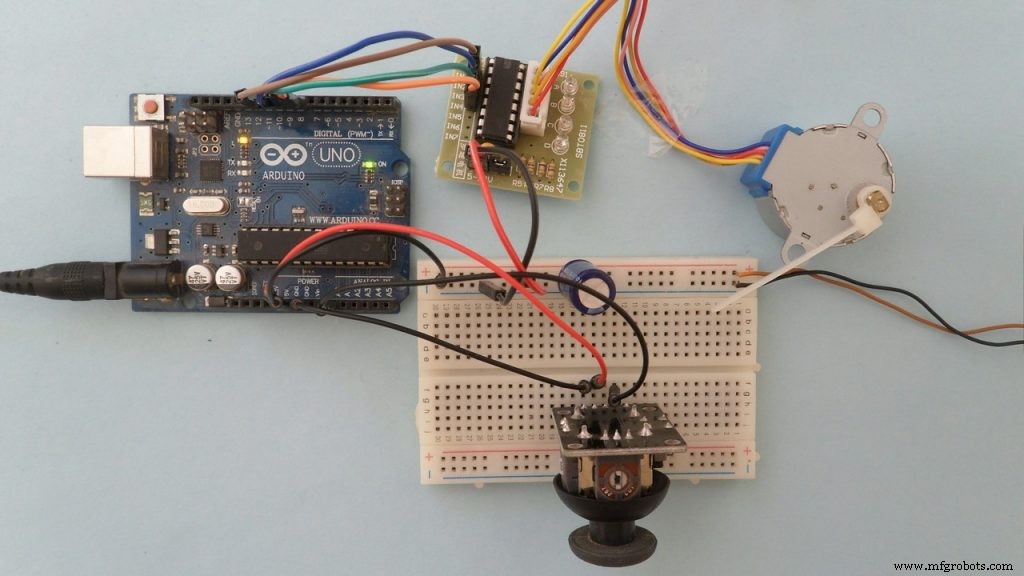
et l'image suivante montre le circuit de frittage :
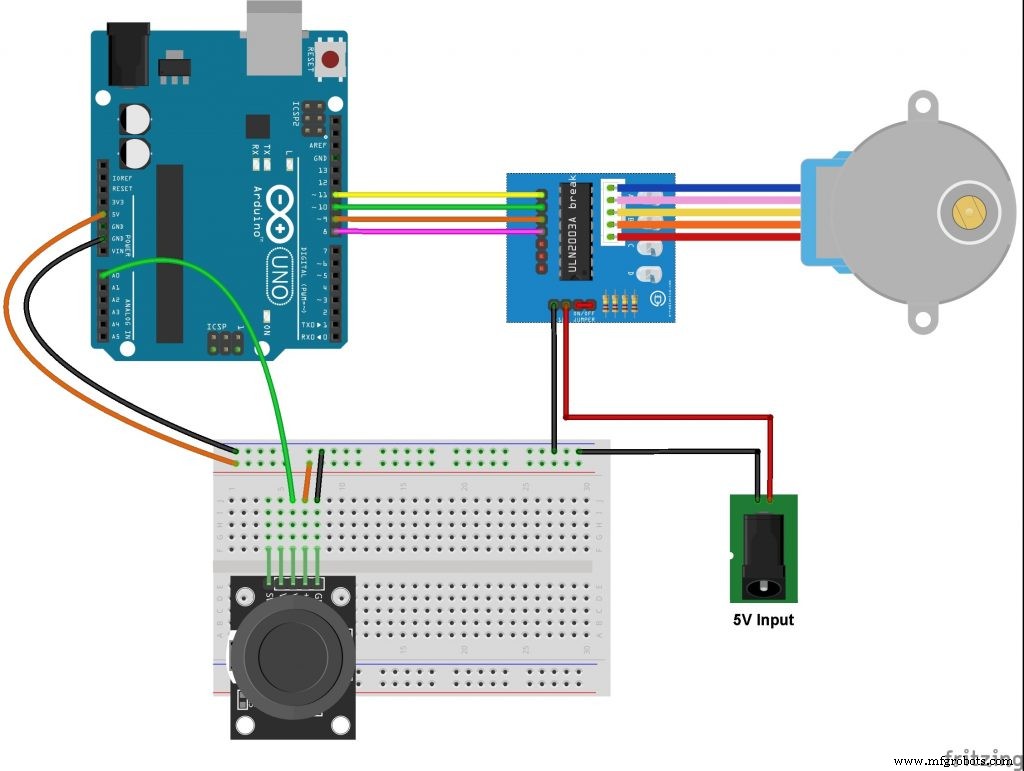
Le moteur pas à pas est connecté à la carte ULN2003A qui est alimentée par une source d'alimentation externe de 5V. Les lignes de contrôle (IN1, IN2, IN3 et IN4) de cette carte sont connectées à l'Arduino comme suit :IN1 à la broche Arduino 11IN2 à la broche Arduino 10IN3 à la broche Arduino 9IN4 à la broche Arduino 8
La carte joystick a 5 broches :GND, +5V, VRX, VRY et SW où :GND et +5V sont les broches d'alimentationVRX est la sortie du potentiomètre de l'axe XVRY est la sortie du potentiomètre de l'axe YSW est la borne du bouton poussoir (l'autre borne est connecté à GND). La sortie du potentiomètre de l'axe X (VRX) est connectée à la broche analogique Arduino A0, la sortie du potentiomètre de l'axe Y (VRY) peut également être utilisée. La broche de commutation (SW) n'est pas utilisée dans cet exemple. En utilisant les potentiomètres de l'axe X et de l'axe Y, nous pouvons contrôler deux moteurs pas à pas indépendamment.
"Alors les gars si vous aimer le projet alors n'oubliez pas de le suivre et de l'aimer"
Code
- CODE :
CODE :C/C++
s'il vous plaît assurez-vous d'ajouter toutes les bibliothèques qui sont incluses dans ce code//ce projet est réalisé par BEASTIDREES62 https://id.arduino.cc/?code=MTxqeHweG6vL2cur&state=amxEcTB2bnNiYjluTUxmRExWaWZnOXIzUk1BLWRqZTZYUGBt%2Ngtx3 bibliothèque de moteurs pas à pas#include// définit le nombre de pas par révolution#define STEPS 32 // définit les broches de contrôle du moteur pas à pas#define IN1 11#define IN2 10#define IN3 9#define IN4 8 // initialise la bibliothèque de moteurs pas à pasStepper pas à pas (STEPS, IN4, IN2, IN3, IN1) ; // la sortie du potentiomètre du joystick est connectée à Arduino A0#define joystick A0 void setup(){ } void loop(){ // lit la valeur analogique du potentiomètre int val =analogRead(joystick); // si le joystic est au milieu ===> arrêter le moteur if( (val> 500) &&(val <523) ) { digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); } else { // déplace le moteur dans la première direction while (val>=523) { // mappe la vitesse entre 5 et 500 tr/min int speed_ =map(val, 523, 1023, 5, 500); // définit la vitesse du moteur stepper.setSpeed(speed_); // déplace le moteur (1 pas) stepper.step(1); val =analogRead (joystick); } // déplace le moteur dans l'autre sens tandis que (val <=500) { // mappe la vitesse entre 5 et 500 tr/min int speed_ =map(val, 500, 0, 5, 500); // définit la vitesse du moteur stepper.setSpeed(speed_); // déplace le moteur (1 pas) stepper.step(-1); val =analogRead (joystick); } } }
Schémas
Processus de fabrication
- Circuits de commande de moteur
- Moteurs pas à pas
- Lissage des performances du groupe motopropulseur EV avec un algorithme de contrôle orienté sur le terrain
- Contrôle d'accès avec QR, RFID et vérification de la température
- Tourelle de sentinelle Nerf autonome
- Contrôler l'accepteur de pièces avec Arduino
- Bibliothèque de moteurs pas à pas bipolaires
- Obstacles pour éviter le robot avec servomoteur
- Tour avec CNC