


Circuits de commande de moteur
Les contacts de verrouillage installés dans le circuit de commande du moteur de la section précédente fonctionnent correctement, mais le moteur ne fonctionnera que tant que chaque bouton-poussoir est maintenu enfoncé.
Si nous voulions garder le moteur en marche même après que l'opérateur ait retiré sa main du ou des interrupteurs de commande, nous pourrions changer le circuit de différentes manières :nous pourrions remplacer les interrupteurs à bouton-poussoir par des interrupteurs à bascule, ou nous pourrait ajouter un peu plus de logique de relais pour "verrouiller" le circuit de commande avec un seul actionnement momentané de l'un des commutateurs.
Voyons comment la deuxième approche est mise en œuvre puisqu'elle est couramment utilisée dans l'industrie :
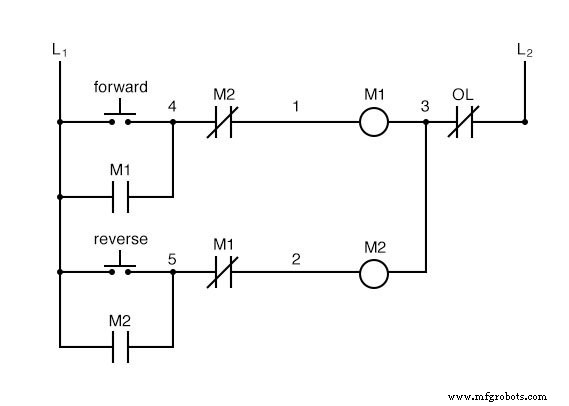
Lorsque le bouton-poussoir « Avancer » est actionné, M1 s'activera, fermant le contact auxiliaire normalement ouvert en parallèle avec cet interrupteur.
Lorsque le bouton-poussoir est relâché, le M1 fermé le contact auxiliaire maintiendra le courant vers la bobine de M1 , verrouillant ainsi le circuit « Forward » dans l'état « on ».
Le même genre de chose se produira lorsque le bouton-poussoir « Reverse » est enfoncé. Ces contacts auxiliaires parallèles sont parfois appelés scellés contacts, le mot « sceau » signifiant essentiellement la même chose que le mot loquet .
Cependant, cela crée un nouveau problème :comment arrêter le moteur ! Comme le circuit existe actuellement, le moteur fonctionnera soit vers l'avant, soit vers l'arrière une fois que le bouton-poussoir correspondant est enfoncé et continuera à fonctionner tant qu'il y aura du courant.
Pour arrêter l'un ou l'autre circuit (en avant ou en arrière), nous avons besoin de certains moyens pour que l'opérateur interrompe l'alimentation des contacteurs du moteur. Nous appellerons ce nouveau commutateur, Stop :
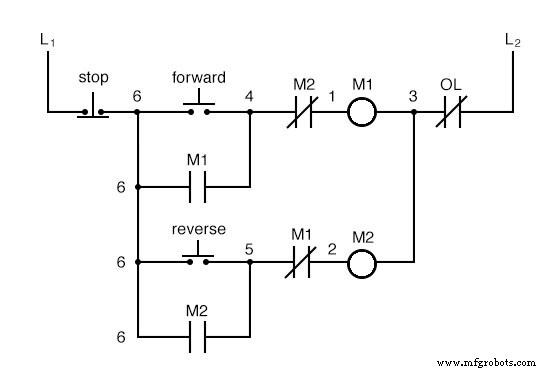
Maintenant, si les circuits avant ou arrière sont verrouillés, ils peuvent être «déverrouillés» en appuyant momentanément sur le bouton-poussoir «Arrêt», qui ouvrira le circuit avant ou arrière, désactivant le contacteur sous tension et ramenant le contact scellé à son état normal (ouvert).
L'interrupteur « Stop », ayant des contacts normalement fermés, conduira l'alimentation vers les circuits avant ou arrière lorsqu'il est relâché.
Jusqu'ici tout va bien. Considérons un autre aspect pratique de notre système de contrôle moteur avant de cesser de l'ajouter.
Si notre moteur hypothétique faisait tourner une charge mécanique avec beaucoup d'élan, comme un grand ventilateur, le moteur pourrait continuer à tourner en roue libre pendant un certain temps après avoir appuyé sur le bouton d'arrêt.
Cela pourrait être problématique si un opérateur essayait d'inverser le sens du moteur sans attendre que le ventilateur s'arrête de tourner.
Si le ventilateur tournait toujours vers l'avant et que le bouton-poussoir « Reverse » était enfoncé, le moteur aurait du mal à surmonter l'inertie du grand ventilateur alors qu'il tentait de commencer à tourner en arrière, en tirant un courant excessif et en réduisant potentiellement la durée de vie du moteur, conduire mécanismes et ventilateur.
Ce que nous aimerions avoir, c'est une sorte de fonction de temporisation dans ce système de commande de moteur pour empêcher un démarrage aussi prématuré de se produire.
Commençons par ajouter quelques bobines de relais temporisé, une en parallèle avec chaque bobine de contacteur de moteur.
Si nous utilisons des contacts qui retardent le retour à leur état normal, ces relais nous fourniront une "mémoire" de la direction dans laquelle le moteur a été alimenté en dernier pour tourner.
Ce que nous voulons que chaque contact temporisé fasse, c'est d'ouvrir la branche de démarrage du circuit de rotation opposée pendant quelques secondes, tandis que le ventilateur s'arrête en roue libre.
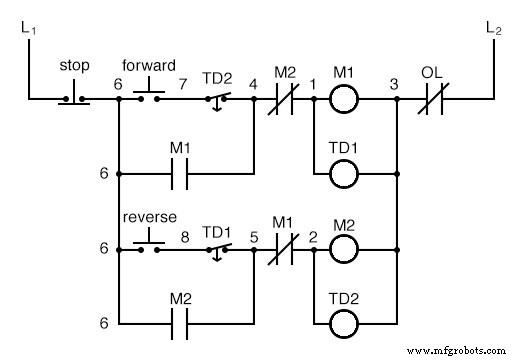
Si le moteur a fonctionné en marche avant, les deux M1 et TD1 aura été mis sous tension.
Ceci étant le cas, le contact normalement fermé temporisé du TD1 entre les fils 8 et 5 se seront immédiatement ouverts au moment TD1 était sous tension.
Lorsque le bouton d'arrêt est enfoncé, contactez TD1 attend le temps spécifié avant de revenir à son état normalement fermé, maintenant ainsi le circuit du bouton-poussoir inverse ouvert pendant la durée ainsi M2 ne peut pas être alimenté.
Lorsque TD1 expire, le contact se fermera et le circuit autorisera M2 à mettre sous tension si le bouton poussoir de marche arrière est enfoncé.
De la même manière, TD2 empêchera le bouton-poussoir « Forward » d'exciter M1 jusqu'à la temporisation prescrite après M2 (et TD2 ) ont été mis hors tension.
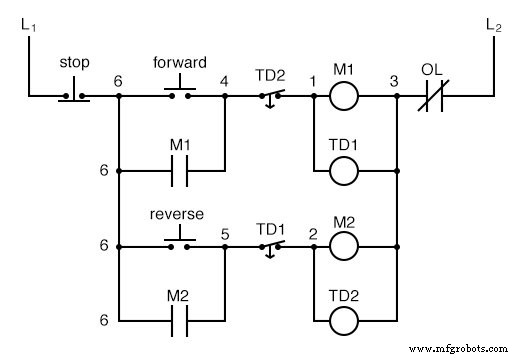
L'observateur attentif remarquera que les fonctions de verrouillage temporel de TD1 et TD2 rendre le M1 et M2 contacts de verrouillage redondants. On peut se débarrasser des contacts auxiliaires M1 et M2 pour les verrouillages et utilisez simplement TD1 et TD2 des contacts, car ils s'ouvrent immédiatement lorsque leurs bobines de relais respectives sont alimentées, "bloquant" ainsi un contacteur si l'autre est alimenté.
Chaque relais temporisé aura un double objectif :empêcher l'autre contacteur de s'activer pendant que le moteur tourne et empêcher le même contacteur de s'activer jusqu'à un certain temps après l'arrêt du moteur.
Le circuit obtenu a l'avantage d'être plus simple que l'exemple précédent :
AVIS :
- Les bobines de contacteur de moteur (ou "démarreur") sont généralement désignées par la lettre "M" dans les schémas logiques à relais.
- Le fonctionnement continu du moteur avec un interrupteur de « démarrage » momentané est possible si un contact « scellé » normalement ouvert du contacteur est connecté en parallèle avec l'interrupteur de démarrage de sorte qu'une fois que le contacteur est sous tension, il reste alimenté et se maintient « verrouillé ».
- Les relais temporisés sont couramment utilisés dans les grands circuits de commande de moteur pour empêcher le démarrage (ou l'inversion) du moteur jusqu'à ce qu'un certain laps de temps se soit écoulé depuis un événement.
FICHES DE TRAVAIL CONNEXES :
- Fiche de travail sur les circuits de commande de moteur à courant alternatif
- Fiche de travail sur les circuits de commande de moteur à courant continu
- Fiche de travail sur la logique des relais électromécaniques
- Fiche de travail sur les relais électromécaniques temporisés
Technologie industrielle
- Circuits permissifs et de verrouillage
- Utilisation de plusieurs circuits combinés
- Circuits d'amplificateur
- Circuits de contrôle
- Que sont les circuits électriques ?
- Simulation informatique de circuits électriques
- Résonance dans les circuits série-parallèle
- Systèmes avancés de contrôle et de protection des circuits électriques
- Une introduction aux différents circuits hydrauliques