


Lissage des performances du groupe motopropulseur EV avec un algorithme de contrôle orienté sur le terrain
Les moteurs hautes performances ont besoin d'un mécanisme de contrôle qui assure une douceur, une fiabilité et une efficacité améliorées. L'un des exemples les plus appropriés d'une telle application est le moteur utilisé dans le groupe motopropulseur des véhicules électriques (EV), qui peut être contrôlé par un système basé sur le contrôle orienté champ (FOC).
Pour qu'un groupe motopropulseur EV roule en douceur, le schéma de commande doit être tel que le moteur soit capable de fonctionner sur une large plage de vitesses et de produire un couple maximal à la vitesse la plus basse. Techniquement parlant, le contrôle du moteur doit être basé sur le couple et le flux magnétique, nous sommes donc en mesure de contrôler le couple avec précision en contrôlant le courant.
Le principe de base de la rotation du rotor d'un moteur est de produire un champ magnétique dans le stator. Cela se fait en alimentant les bobines du stator avec un courant alternatif. Le secret du bon fonctionnement d'un moteur réside dans la connaissance de la position du rotor, qui est l'angle entre l'axe de flux du rotor et l'axe magnétique du stator. Une fois cette valeur connue, le courant statorique est aligné avec l'axe de couple du rotor. Pour atteindre une efficacité maximale, le flux magnétique du stator doit être perpendiculaire au flux magnétique du rotor.
Contrôle moteur basé sur FOC
Sur le papier, un système de commande de moteur basé sur le contrôle orienté sur le terrain (FOC) typique apparaît comme le montre la figure 1.
cliquez pour l'image en taille réelle
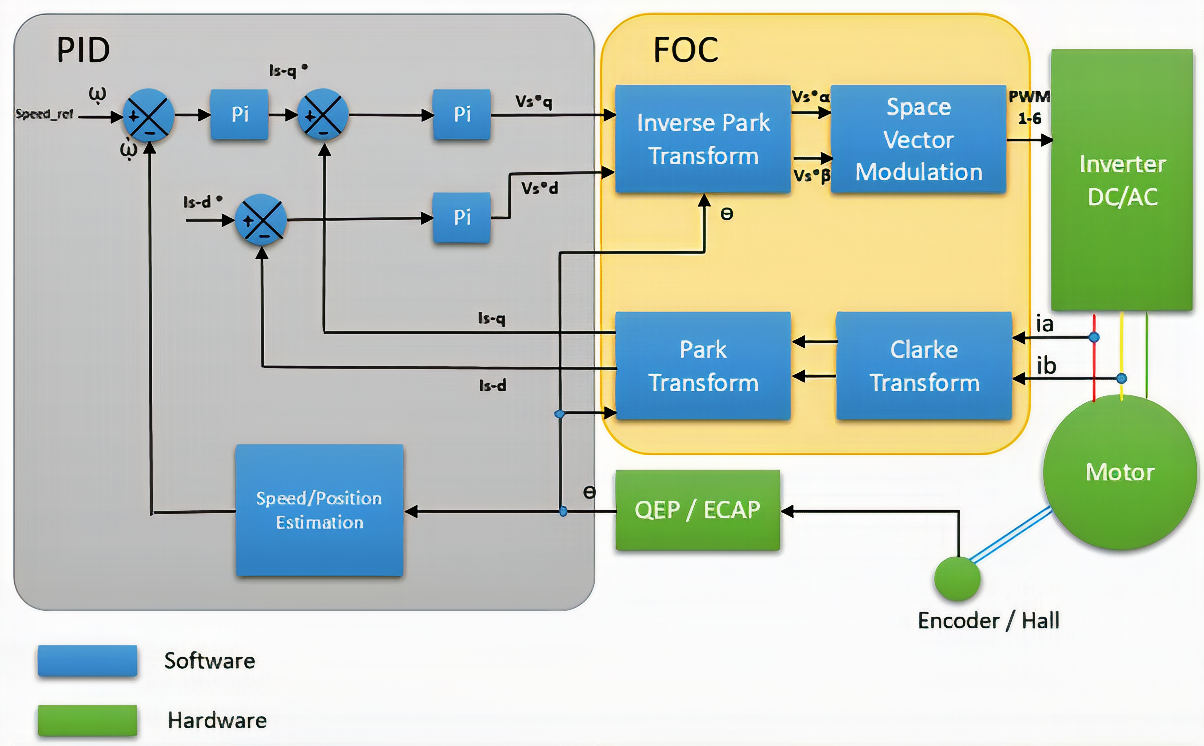
Figure 1 :Le schéma montre les composants matériels et logiciels d'un système de commande de moteur basé sur FOC. Source :Texas Instruments
Comprenons chacun des composants logiciels et matériels :
- Onduleur triphasé :Un onduleur triphasé AC/DC fournit la tension triphasée au moteur PMSM/BLDC pour l'entraînement. Il prend les signaux de modulation de largeur d'impulsion (PWM) du bloc de modulation vectorielle spatiale (SVM).
- Interface QEP :Il s'interface avec un encodeur pour obtenir la position mécanique du rotor et la transmettre à d'autres blocs.
- Bloc d'estimation vitesse/position :Comme son nom l'indique, les calculs pour obtenir la position et la vitesse du rotor sont effectués dans ce bloc.
- Contrôle PID :La dérivée intégrale proportionnelle (PID) est une boucle de contrôle qui repose sur la rétroaction du moteur sous forme de couple. En calculant la différence entre le couple souhaité et le couple reçu du bloc de transformation Park, il effectue la correction.
- Transformation de Clarke :Le bloc de transformation de Clarke convertit le courant statorique (ia, ib) en système de coordonnées de flux et de couple (d-q) à l'aide de la formule de transformation de Clarke. Le référentiel stationnaire d'un système triphasé est transformé en un système à deux quadrants dans un référentiel stationnaire.
- Transformée de Park et transformée de Park inverse :Ce bloc convertit le référentiel fixe en référentiel tournant avec un système diphasé à axes orthogonaux. Les composantes orthogonales sont d-q, qui sont respectivement l'axe direct du moteur et l'axe en quadrature. Le bloc de transformation de Park inverse apparaît lorsque la tension de sortie du stator doit être reconvertie en référence de trame stationnaire (référence de stator).
- Modulation vectorielle spatiale :C'est une technique pour déterminer le signal PWM qui doit être appliqué au moteur. SVM prend le vecteur de tension du stator en entrée et produit une tension de sortie triphasée en sortie.
Ensuite, nous explorerons comment ces composants sont utilisés pour entraîner un moteur à l'aide de l'algorithme FOC.
Une vue du flux de travail FOC
Pour qu'un moteur électrique triphasé soit contrôlé, nous devons fournir une tension appropriée au moteur en lisant le courant de phase Ia, Ib, Ic. Sans contrôle sur eux, il n'est pas possible de créer un vecteur de flux statorique, qui soit à 90 degrés par rapport au vecteur flux rotorique.
FOC est un algorithme intensif en mathématiques qui permet d'atteindre cet objectif et plus facilement, bien que le développement de FOC soit assez complexe. L'algorithme FOC est capable de simplifier le contrôle du référentiel de courants sinusoïdaux triphasés en les décomposant en référentiels de flux et de couple (d-q). Ces deux composants peuvent être contrôlés séparément.
La figure 1 montre l'encodeur/Hall qui détermine la position du rotor et la transmet au bloc vitesse/position. Cette valeur est également transmise au bloc de transformation Park et Park inverse. Dans le même cas, les courants de phase (ia, ib) du moteur sont transmis au bloc de transformation de Clarke. Les courants de phase du moteur sont convertis par transformée de Clarke en deux courants orthogonaux (iα, iβ). Les courants de phase nouvellement convertis signifient maintenant respectivement des courants producteurs de couple et producteurs de flux. Bien que nous ayons réussi à décomposer le courant de phase en composants de flux et de couple, ils sont toujours sinusoïdaux, ce qui les rend difficiles à contrôler car ils ne cessent de changer.
La tâche suivante de l'algorithme FOC est de supprimer les ondes sinusoïdales, ce qui nécessite une entrée importante :la position du rotor. Nous voyons dans le diagramme que cette valeur est également transmise au bloc Park-transform. Dans ce bloc, l'astuce consiste à passer d'un référentiel fixe - du point de vue du stator - à un référentiel tournant du point de vue du rotor. En termes simples, le bloc de transformation Park convertit les deux courants alternatifs (iα, iβ) en courants continus. Cela permet au bloc PID de le contrôler assez facilement comme il le souhaite.
Introduisons maintenant le bloc PID dans l'image. L'entrée du bloc PID à partir du bloc FOC est Iq et Id, composant de couple et de flux. Dans le cadre d'un EV, le bloc PID recevra une référence de vitesse lorsque le conducteur actionnera l'accélérateur. Le bloc PID compare maintenant les deux valeurs et calcule l'erreur. Cette erreur est la valeur pour laquelle le bloc PID doit faire tourner le moteur. La sortie que donne le bloc PID est Vq et Vd. Cette sortie atteint la transformation inverse de Clarke et Park où l'exact opposé de la transformation de Clarke et Park a lieu. Le bloc de transformation de Park inverse transforme le référentiel tournant en référentiel fixe afin que leurs phases de moteurs puissent être commutées.
cliquez pour l'image en taille réelle
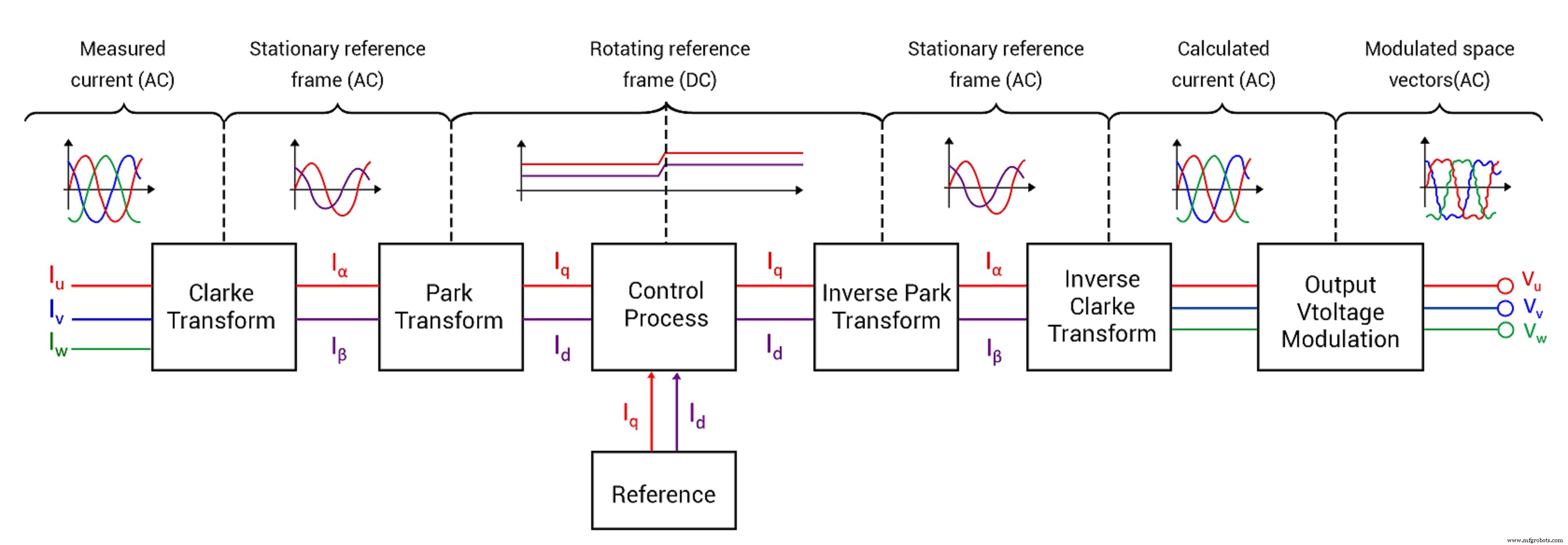
Figure 2 :La sortie du PID atteint la transformation inverse de Clarke et Park où l'exact opposé de la transformation de Clarke et Park a lieu. Source :Texas Instruments
Dans la dernière étape du contrôle moteur basé sur l'algorithme FOC, le rôle de la modulation vectorielle spatiale (SVM) prend beaucoup d'importance. Le rôle de SVM est de générer les signaux PWM qui sont introduits dans l'onduleur qui, à son tour, génère la tension triphasée qui entraîne le moteur. D'une certaine manière, SVM fait également le travail d'une transformation de Clarke inverse.
Un onduleur triphasé a six transistors qui fournissent la tension de sortie au moteur. Il existe essentiellement deux états dans lesquels ces sorties doivent être avec le transistor du haut fermé et celui du bas ouvert ou vice-versa. Avec deux états et trois sorties, un total de huit états (2 3 ) peut être calculé. Lorsque vous tracez ces huit états, également appelés vecteurs de base, sur un diagramme en étoile hexagonal, vous constaterez que chaque vecteur adjacent est distant de 60 degrés en termes de différence de phase. Le SVM trouve le vecteur moyen qui donne la tension de sortie (Vout ).
Contrôle moteur de facto EV
Le FOC en tant que système de contrôle du moteur est indispensable pour les conceptions de véhicules électriques. Avec le type de fonctionnement silencieux et fluide du moteur exigé par un VE, le FOC se démarque comme un bon choix. De nombreux OEM et développeurs de systèmes de contrôle ajustent souvent l'algorithme FOC standard pour répondre aux exigences uniques de leur programme EV, mais le concept de base reste le même.
Les avancées dans les microcontrôleurs de qualité automobile, comme la famille de microcontrôleurs PIC18Fxx39 de Microchip ou les microcontrôleurs en temps réel C2000 de TI, sont en mesure d'accélérer le développement d'un algorithme FOC pour les systèmes de contrôle de moteur EV.
>> Cet article a été initialement publié sur notre site frère, EDN .
 Vaibhav Anand est responsable du marketing numérique chez Embitel.
Vaibhav Anand est responsable du marketing numérique chez Embitel.  Saurabh S. Khobe est ingénieur embarqué chez Embitel.
Saurabh S. Khobe est ingénieur embarqué chez Embitel.
Contenus associés :
- Résoudre les défis de conception déterministe de la commande de moteur multi-axes
- Contrôler en toute sécurité un onduleur de traction EV
- Les solutions émergentes améliorent la gestion de l'alimentation des véhicules électriques
- Identification des exigences pour le développement E/E
- Le contrôleur de moteur intègre le noyau Arm Cortex-M0
Pour plus d'informations sur Embedded, abonnez-vous à la newsletter hebdomadaire d'Embedded.
Embarqué
- Circuits permissifs et de verrouillage
- Circuits de commande de moteur
- MODULE DE DONNÉES : écran TFT ultra-étiré de 23,1 pouces avec contrôle intelligent
- Maxim :amplificateur de détection de courant bidirectionnel avec rejet PWM
- Le contrôleur de moteur intègre le noyau Arm Cortex-M0
- Lanner :solution optimisée pour la virtualisation avec processeur multicœur
- Blog :Appareils médicaux à haute performance
- Tour avec CNC
- Pourquoi vous devriez faire confiance à SEW-Eurodrive pour tous vos besoins en contrôle moteur