


Top 10 des tâches pour la programmation hors ligne
Votre tâche est-elle adaptée à la programmation hors ligne ? Nous examinons les 10 principales tâches robotiques possibles avec un logiciel de programmation hors ligne.
Une préoccupation commune à propos de toute nouvelle technologie est contenue dans la question "Mais cela fonctionnera-t-il pour ma situation unique ?"
La programmation hors ligne n'est pas différente. Bien que les gens en voient assez rapidement les avantages, ils craignent parfois que cela ne soit pas applicable à leur tâche spécifique. Nous comprenons leur inquiétude. L'entreprise de chacun est unique et il peut être difficile de dire si une technologie telle que la programmation hors ligne vous conviendra le mieux.
Cependant, même si votre situation est unique, il existe des similitudes entre votre application robotique et d'autres que nous voyons tout le temps. La programmation hors ligne peut être utilisée pour de nombreuses tâches robotiques.
Dans cet article, nous expliquons quels facteurs déterminent si vous pouvez utiliser la programmation hors ligne, et nous énumérons nos 10 principales tâches dans RoboDK.
Ce qui détermine si une tâche peut utiliser la programmation hors ligne
Si vous pouvez effectuer une tâche avec un robot, vous pouvez presque certainement la programmer en utilisant la programmation hors ligne. Cependant, il existe quelques facteurs qui déterminent la facilité (ou la difficulté) de la réalisation de la programmation.
Cinq facteurs importants sont :
- Fonctionnalité du logiciel — Tous les logiciels de programmation hors ligne ne sont pas identiques. Certains packages sont fournis par des fabricants de robots particuliers, ils sont donc liés à ces marques et ont une prise en charge variable pour certaines tâches.
- Compatibilité des robots — Certains fabricants ne fournissent pas de logiciel de programmation hors ligne, ce qui est un problème si vous comptez sur le logiciel du fabricant. Pour obtenir des conseils sur la manière d'évaluer votre robot, consultez notre article :La programmation hors ligne fonctionnera-t-elle avec mon robot ?
- Disponibilité du modèle de robot — Vous devez vous assurer que votre modèle de robot est disponible pour le logiciel de programmation hors ligne que vous utilisez. Consultez notre bibliothèque de robots pour plus de 300 modèles de plus de 30 fabricants de robots.
- Niveau d'expertise — Certains types traditionnels de programmation hors ligne (par exemple dans l'industrie automobile) impliquent des outils logiciels complexes qui ne sont pas faciles à utiliser. Un logiciel comme RoboDK, en revanche, facilite la programmation hors ligne de votre robot. Par conséquent, vous avez besoin de beaucoup moins d'expertise que par le passé.
La plupart de ces facteurs peuvent être surmontés en sélectionnant le bon logiciel de programmation hors ligne.
Top 10 des tâches pour la programmation hors ligne
Nous voyons souvent des personnes implémenter des tâches identiques ou similaires à l'aide de la programmation hors ligne. Pour vous faciliter la vie, nous avons rassemblé une liste des tâches les plus courantes, ainsi que des instructions sur la façon de les mettre en œuvre à l'aide de la programmation hors ligne.
Vous pouvez trouver des simulations interactives et des didacticiels sur la programmation de ces tâches dans RoboDK sur notre page d'exemples.
1. Usinage robotisé
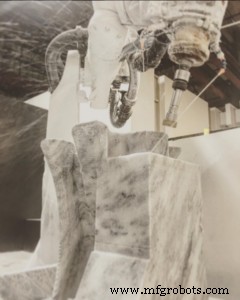
Dans le passé, le fraisage et l'usinage automatisés étaient généralement effectués avec des machines à commande numérique. Si des robots étaient impliqués, ils n'étaient généralement utilisés que pour l'entretien des machines.
De nos jours, cependant, les robots commencent à être utilisés pour l'usinage lui-même. Une précision accrue des robots industriels et une programmation hors ligne plus intuitive signifient que vous pouvez facilement transformer le code CNC en instructions de robot.
RoboDK inclut un outil d'usinage de robot dédié dans son menu Utilitaires. Voir une démonstration sur ce lien :RoboDK Machining.
2. Choisissez et placez
La tâche robotique la plus populaire est peut-être le pick and place, qui consiste à déplacer des objets d'une partie de la cellule de travail à une autre. De telles tâches sont très faciles à programmer en utilisant la programmation hors ligne. Il est possible de programmer une simple tâche de pick and place en moins de 15 minutes, comme je l'ai démontré dans un article précédent.
Voir une démonstration sur ce lien :RoboDK Pick and Place.
3. Peinture Robot
Si vous demandiez à un membre du public de nommer certaines tâches robotiques industrielles, je parie que la peinture robotique figurerait en tête de liste. La peinture est l'une des applications robotiques les plus typiques et il est facile de le faire en utilisant la programmation hors ligne. Le logiciel peut générer les trajectoires d'outils en quelques minutes.

Voir une démonstration sur ce lien :RoboDK Painting.
4. Robot de soudage par points
La programmation hors ligne est utilisée depuis longtemps pour générer des programmes de soudage par points. Cependant, dans le passé, cela nécessitait de nombreuses heures de simulation ardue et nécessitait un programmeur spécialisé. Avec un logiciel plus récent, les programmes de soudage par points peuvent être générés facilement, sans erreur.
Voir une démonstration sur ce lien :RoboDK Spot Welding.
5. Impression 3D
Je dirais que l'impression 3D est l'une des technologies phares du 21e siècle. Bien qu'elles existent depuis un certain temps, les applications d'impression 3D ont explosé au cours de la dernière décennie. L'un des développements récents les plus intéressants consiste à utiliser des robots eux-mêmes comme imprimantes 3D. La programmation hors ligne rend cela très simple à réaliser.

RoboDK inclut un outil d'impression 3D dédié dans son menu Utilitaires. Voir une démonstration sur ce lien :RoboDK 3D Printing.
6. Prélèvement par convoyeur
Les convoyeurs sont utilisés dans de nombreuses industries pour transporter des objets entre différents processus à valeur ajoutée. Cependant, ils sont souvent difficiles à intégrer à un robot. Si votre logiciel de programmation hors ligne les prend en charge (comme RoboDK), cela peut vous faire gagner beaucoup de temps d'intégration en ligne.

Voir une démonstration sur ce lien :RoboDK Conveyor Picking.
7. Inspection automatisée
L'inspection par vision industrielle est devenue une application populaire pour les robots. Les raisons en sont claires :l'inspection manuelle est une tâche ardue qui augmente à mesure que la productivité augmente. La programmation hors ligne de la vision industrielle ne peut jamais remplacer complètement la programmation en ligne (car vous devez entraîner les caméras à l'aide d'images réelles), mais elle peut aider à accélérer le processus d'intégration.

Voir une démonstration sur ce lien :RoboDK Automated Inspection .
8. Dessin
Dessiner peut sembler une activité frivole pour un robot. Cependant, il a de nombreuses applications utiles. Les robots peuvent être utilisés pour dessiner des motifs de glaçage sur des gâteaux, découper des contours artistiques à l'aide d'outils de fraisage et peindre avec un style d'écriture manuscrite sur des produits. La programmation hors ligne facilite la conversion d'images SVG (la norme pour l'imagerie vectorielle) en trajectoires de robot.
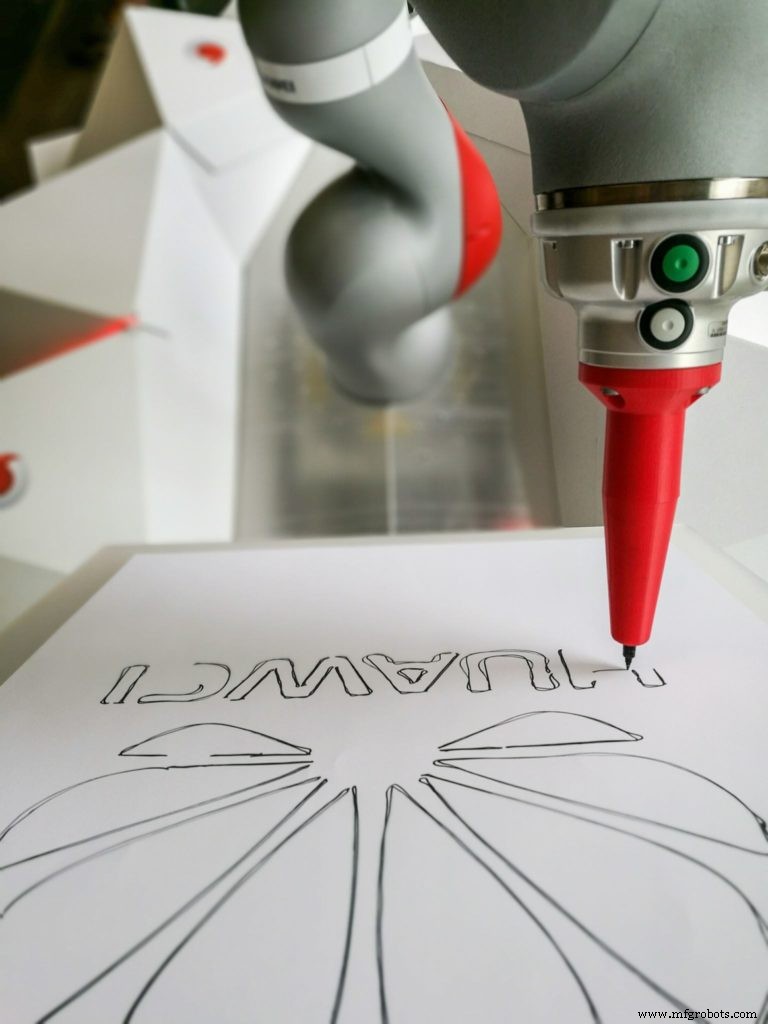
Voir une démonstration sur ce lien :Dessin RoboDK.
9. Intégration d'un axe externe
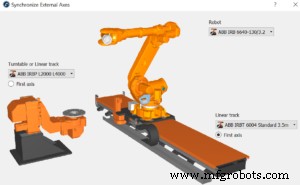
Ce n'est pas vraiment une « tâche » en soi. Cela ressemble plus à une technique pour améliorer la gamme de tâches que vous pouvez réaliser avec le robot. Les axes externes vous permettent d'étendre l'espace de travail du robot pour des tâches telles que la peinture, le soudage par points, l'inspection, etc. Il s'agit essentiellement d'un ou deux degrés de liberté supplémentaires ajoutés au robot. Le seul problème est qu'ils doivent être synchronisés avec le robot. Avec la programmation hors ligne, cette synchronisation est facile.
RoboDK inclut un outil de synchronisation dédié pour les axes externes dans son menu Utilitaires. Voir une démonstration sur ce lien :RoboDK Machining With External Axis.
10. Tout ce qu'un robot peut faire… OLP peut le faire aussi
Même si votre tâche n'est pas répertoriée ici, il est probable que vous puissiez l'accomplir avec une programmation hors ligne. Si vous n'êtes pas sûr, n'hésitez pas à nous contacter et à nous poser des questions sur votre tâche particulière, ou à poster un commentaire ci-dessous.
La meilleure façon de commencer à utiliser la programmation hors ligne est simplement de télécharger le logiciel et de l'essayer par vous-même. Téléchargez une copie d'essai gratuite sur ce lien :Télécharger RoboDK.
Robot industriel
- Les 7 principales tendances de fabrication pour 2020
- Top 7 des podcasts pour les développeurs IOT
- Top 10 des flux de travail pour les fabricants
- Les 5 principaux avantages du SaaS pour les fabricants
- 7 meilleurs livres pour l'ingénierie électronique
- Comment choisir un projet pour l'automatisation
- Les meilleurs conseils pour souder l'aluminium
- Programmation CNC pour les machinistes CNC
- Principales raisons de la défaillance du système hydraulique