


Moteur pas à pas imprimé en 3D
Composants et fournitures
 |
| × | 1 | |||
| × | 6 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 1 |
À propos de ce projet
https://www.youtube.com/embed/v2FNUNALSTwJe suis récemment tombé sur cette instructable d'un moteur à courant continu imprimé en 3D et j'ai pensé que je pouvais faire une étape davantage; Au sens propre. J'ai conçu ce moteur pas à pas avec huit électro-aimants, six aimants en néodyme, avec un rotor et un boîtier de stator imprimés en 3D. Il s'agit spécifiquement d'un moteur pas à pas à aimant permanent capable d'effectuer des pas complets de 15 degrés et des demi-pas de 7,5 degrés. Il existe de nombreux types de moteurs pas à pas, mais la plupart d'entre eux fonctionnent de manière très similaire à celui que j'ai conçu ici. Il s'agit d'un affichage éducatif pour montrer aux autres comment fonctionnent les moteurs pas à pas. J'ai conçu ceci pour fonctionner sur une alimentation 5-12VDC afin qu'il fonctionne avec la plupart des alimentations USB.
Je fais également un cadeau sur ma chaîne Youtube. Je vais donner un arduino, les transistors utilisés dans ce projet et quelques commutateurs. Plus de détails dans la dernière étape.
Étape 1 :Ce dont vous aurez besoin
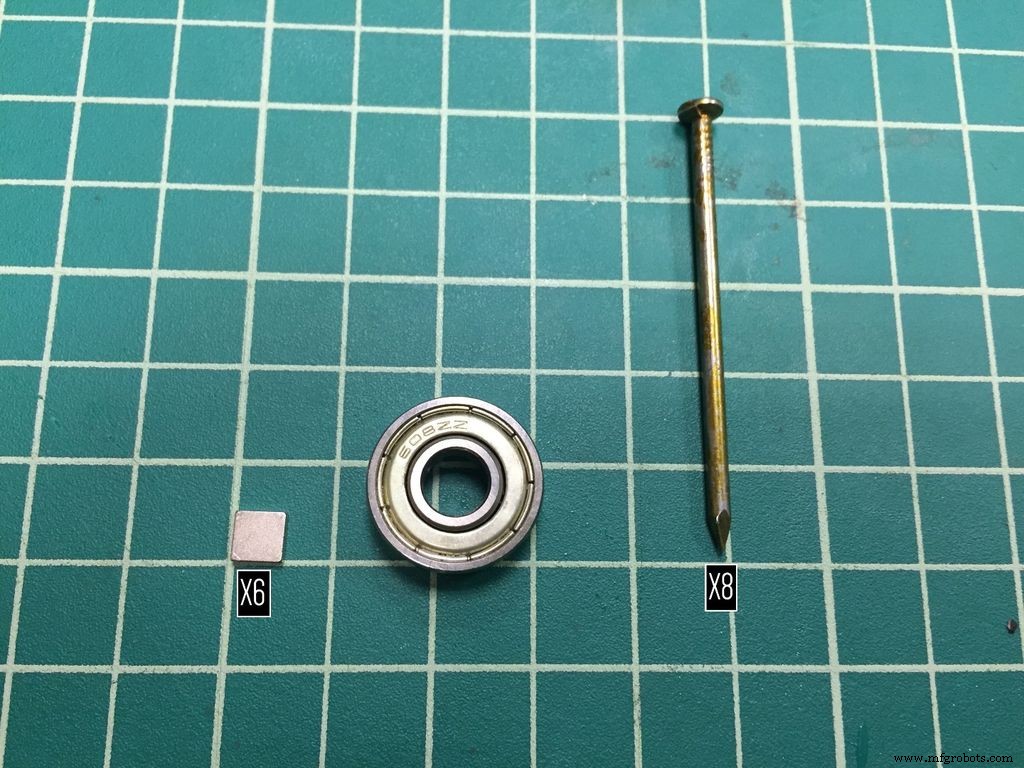


- Six aimants en néodyme 1/4"
- Roulement 608ZZ
- Huit clous 8d 2-3/8" - Les clous que vous utilisez n'ont pas d'importance tant qu'ils s'adaptent.
- Fil magnétique - J'ai utilisé un fil magnétique de 0,315 mm mais ce n'est pas critique.
- Arduino Uno
- Quatre transistors - J'ai utilisé des transistors PNP que j'avais qui traînaient, mais vous pouvez utiliser les transistors de votre choix ou des MOSFETS tant que vous vous assurez qu'ils peuvent gérer le courant que votre moteur tirera. Lisez attentivement la fiche technique pour des recommandations spécifiques. Sur 5v, le moteur de la mine consomme environ 1 ampère et sur 12v, il demande environ 3 ampères.
- Rotor et Stator imprimés en 3D
- Colle
- Ruban électrique
- Une boussole
Étape 2 :Imprimez le rotor dodécagone et le stator octogonal
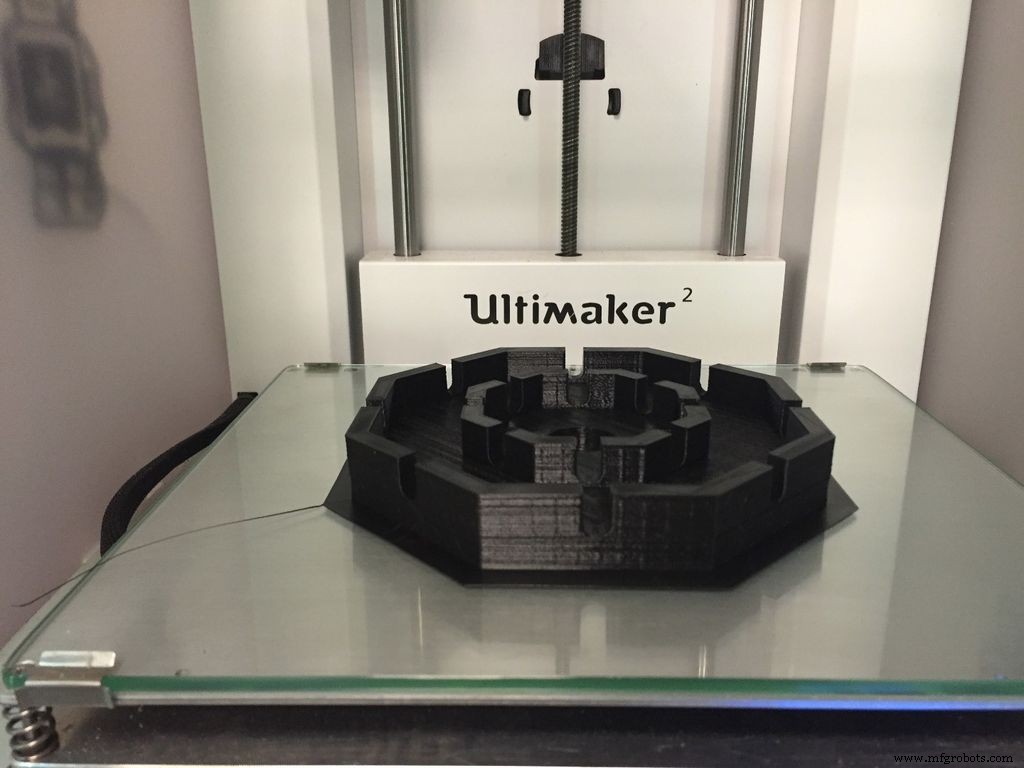
Imprimez avec des hubs 3D !
Étape 3 :



Utilisez une boussole pour déterminer les pôles de vos aimants et collez les aimants avec les pôles nord tournés vers l'extérieur. Si vos aimants sont suffisamment puissants, la boussole de certains smartphones vous indiquera la polarité des aimants.
Étape 4 :
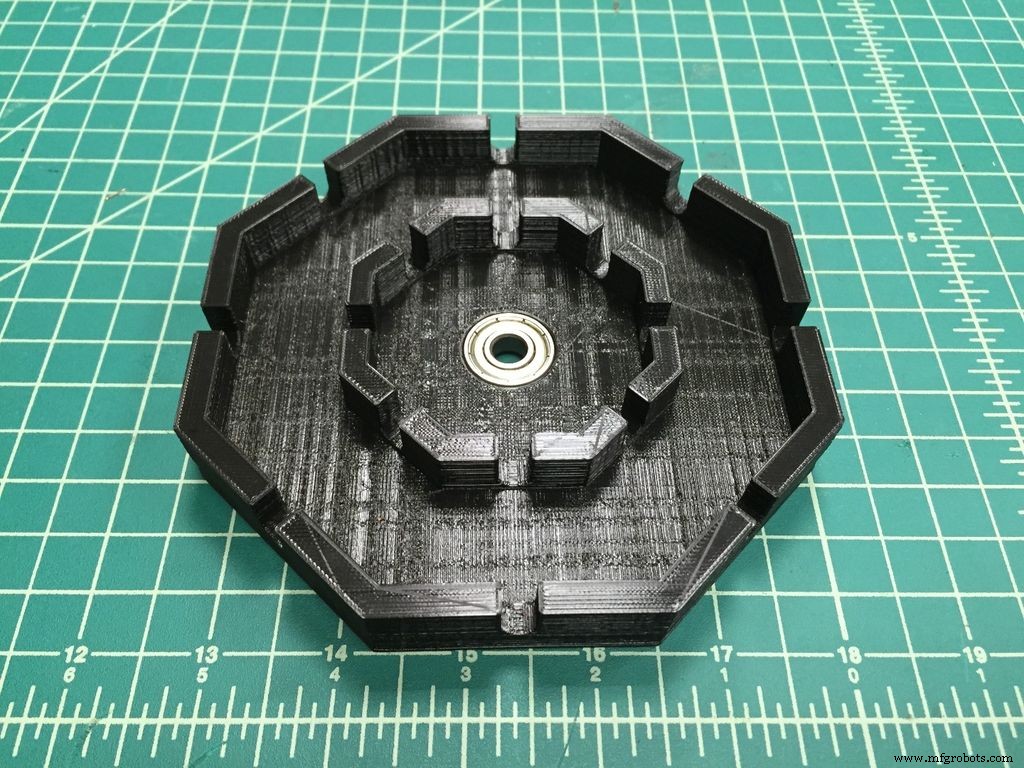

Pressez le roulement dans le stator puis pressez le rotor dans le roulement. J'ai été agréablement surpris de la qualité de l'ajustement de la presse à roulements dans le stator. Lors de l'impression 3D, les trous ont tendance à vouloir se rétrécir vers l'intérieur et finissent par être plus petits que prévu, donc je les surdimensionne généralement un peu.
Étape 5 :
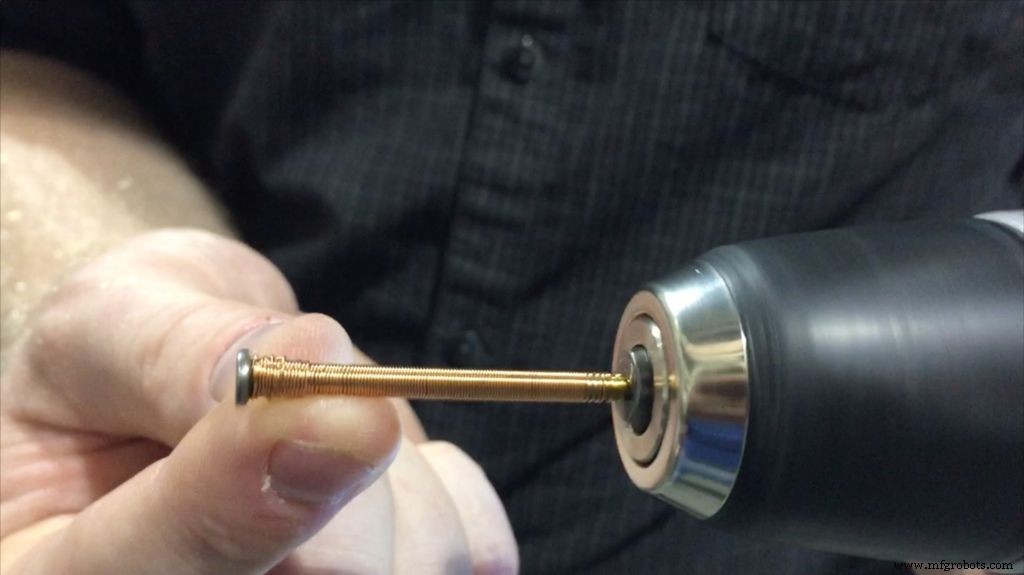

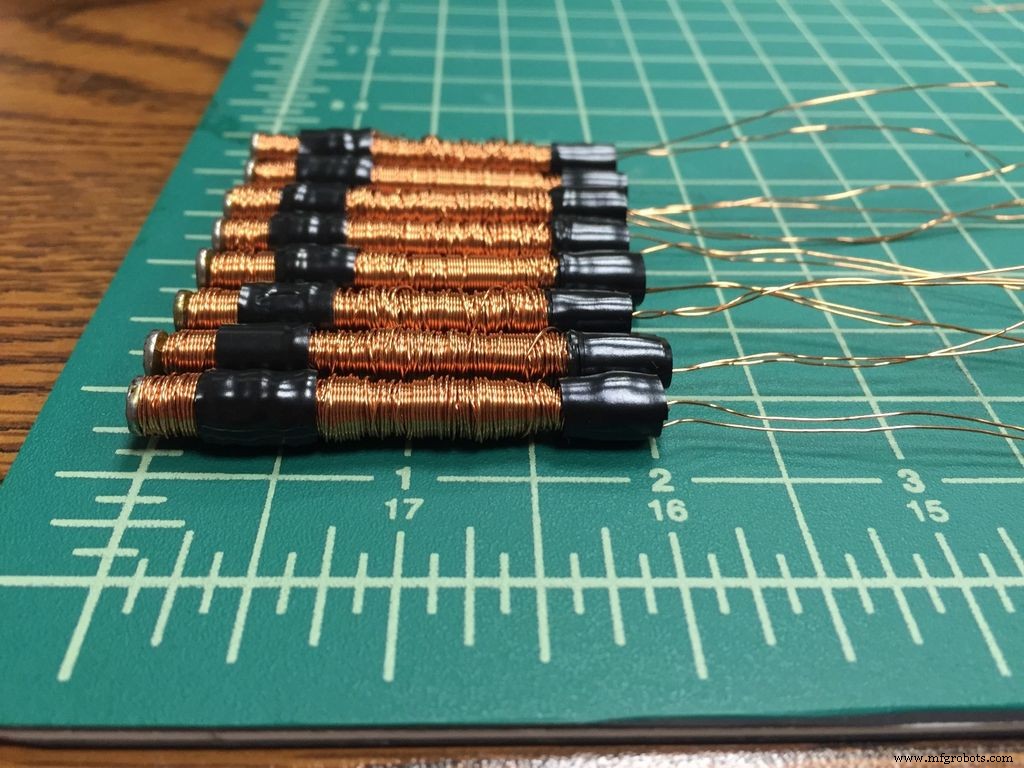
Coupez 9 morceaux de fil à 25 pieds et enroulez-les avec une perceuse. Utilisez une boussole et une batterie pour déterminer la configuration requise pour vous donner le pôle sud à la tête du clou. Utilisez un marqueur ou une gaine thermorétractable pour marquer le fil négatif de vos électro-aimants. Enveloppez les sections des électro-aimants avec du ruban électrique où ils entreront en contact avec le boîtier du stator. Cela sert à deux fins. Il maintient fermement les électro-aimants en place et isole également le boîtier de toute chaleur que la bobine peut produire. Les paires de bobines consomment environ 1 ampère avec l'alimentation 5V que j'utilise. Les transistors que j'ai choisis peuvent fonctionner avec une alimentation 12V dont les bobines tirent environ 3 ampères. Le problème avec l'alimentation à tension plus élevée est que si je la laisse fonctionner un peu, les bobines commencent à chauffer.
Avertissement :
J'ai conçu ceci pour fonctionner sur une alimentation 5-12VDC. Si vous décidez de sortir des sentiers battus, utilisez la loi d'Ohm pour déterminer la taille de bobines que vous souhaitez. V =I*R
N'oubliez pas que moins il y a d'enroulements sur votre bobine, plus la résistance sera faible. Si vous ne faites pas attention, vos bobines tireront plus de courant que votre alimentation ou vos transistors ne peuvent en supporter et de mauvaises choses se produiront.
Étape 6 :
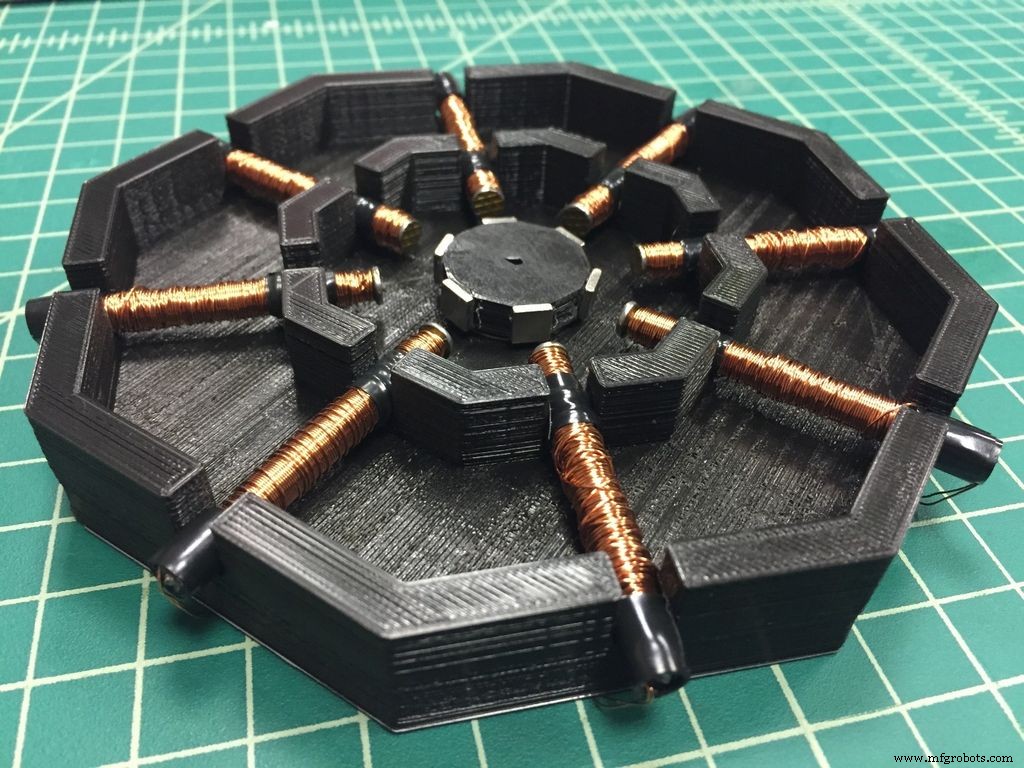
Poussez les électro-aimants dans le stator jusqu'à ce qu'ils soient à environ 1/4" des aimants en néodyme. Vous pouvez faire glisser les électro-aimants à votre guise, mais je ne voulais pas qu'ils soient trop près car les clous deviendraient magnétisés beaucoup plus rapidement. C'est l'inconvénient de l'utilisation des clous. Le moteur fonctionnera toujours une fois qu'ils seront magnétisés, mais il sera moins efficace. Les baguettes à souder sont une bonne alternative aux clous si vous en avez.
Étape 7 :Soudez le tout ensemble
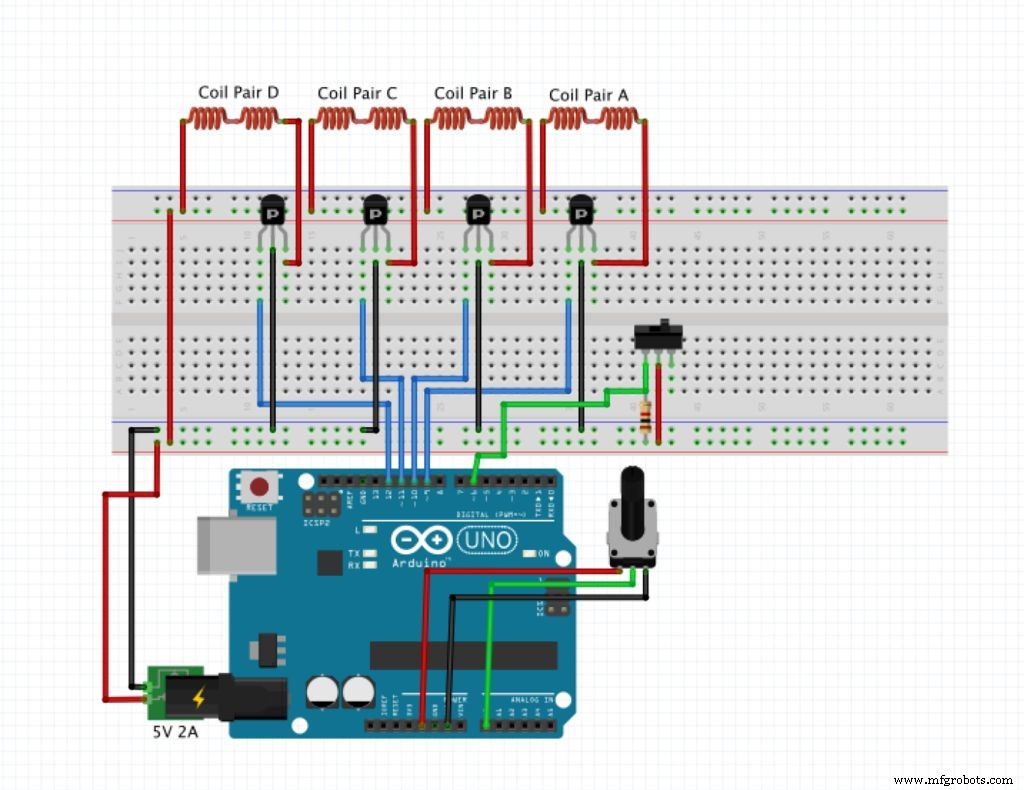
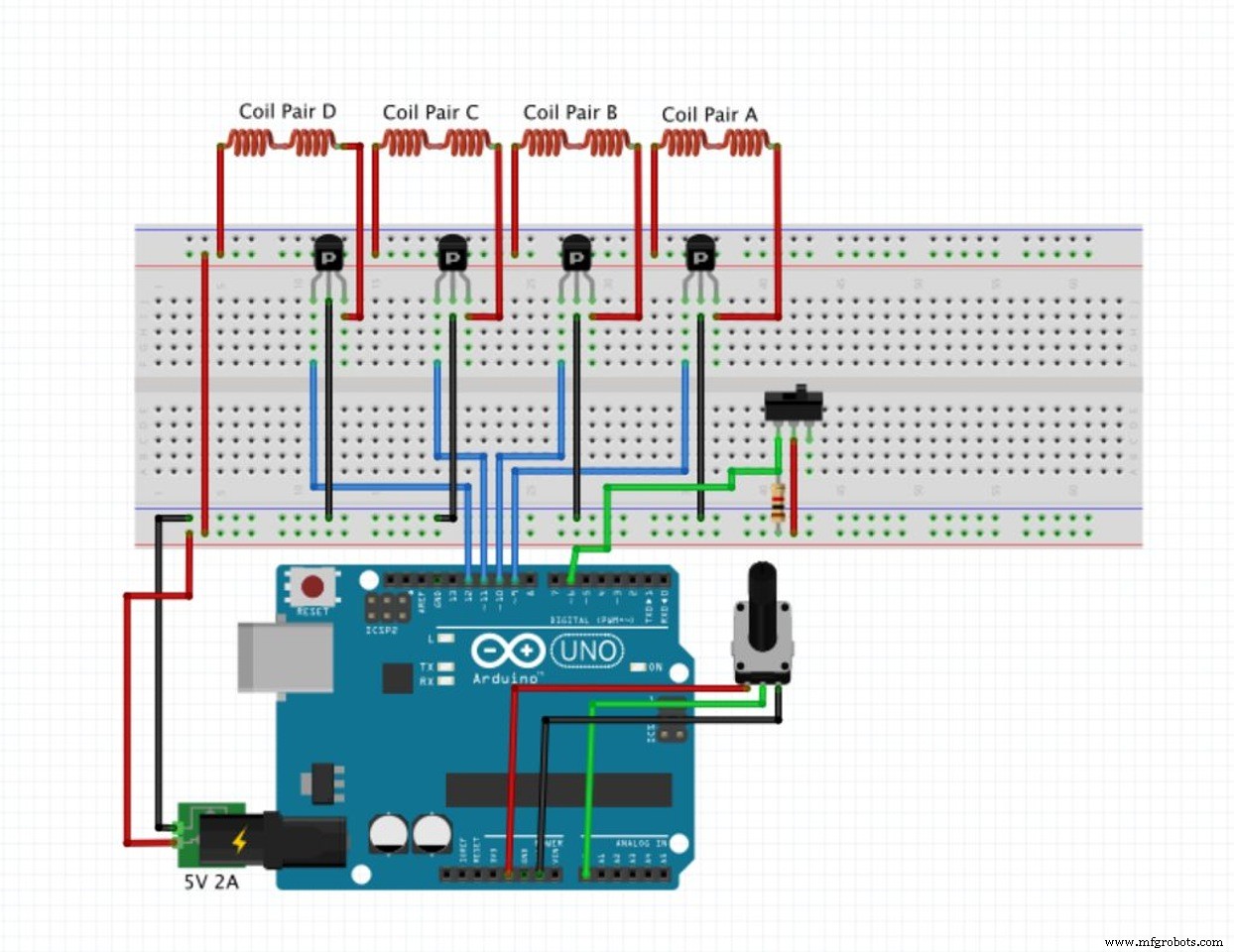
Câblez vos paires de bobines en série et connectez-les de sorte que tous les pôles sud des électro-aimants soient tournés vers l'intérieur. La résistance que j'ai utilisée dans le schéma est une résistance de 1k. Le but de ceci est d'empêcher la broche numérique de "flotter" haut lorsqu'elle est en position d'arrêt. Encore une fois, assurez-vous d'utiliser un transistor capable de supporter le courant que vos bobines demanderont.
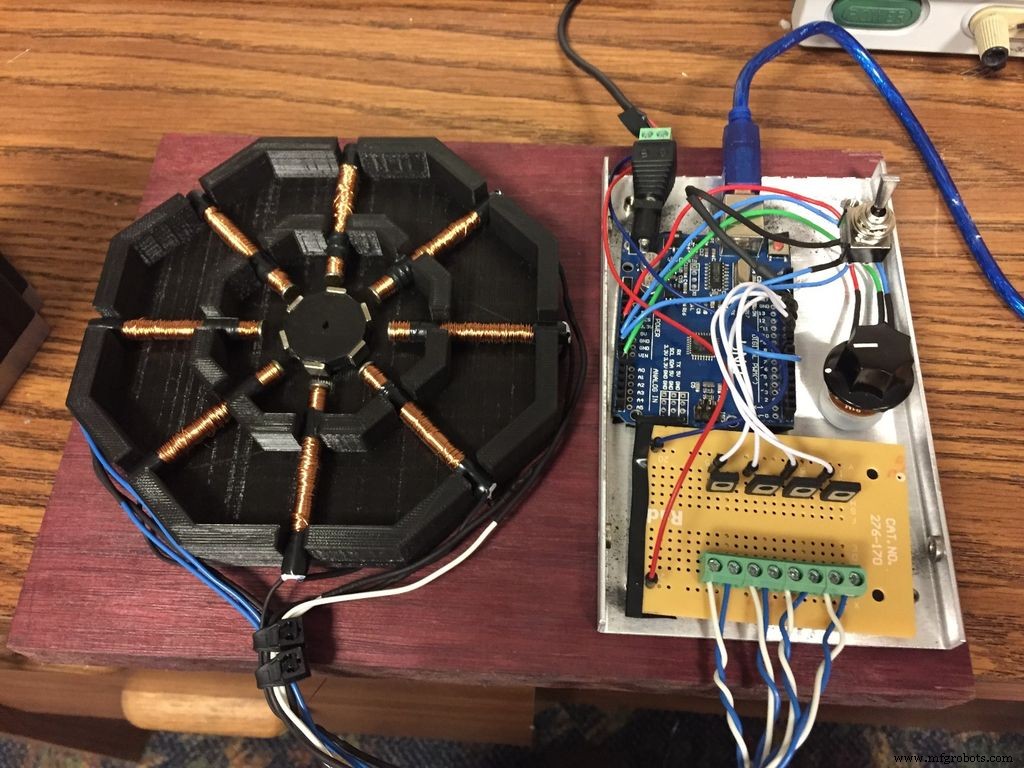
Chargez le code source sur votre arduino et vous êtes prêt à partir !
Étape 8 :Payez au suivant !

Je vais offrir un arduino, les transistors utilisés dans ce projet, ainsi que des commutateurs et des câbles de connexion.
Règles pour le cadeau :
Abonnez-vous à mon Chaîne YouTube, comme cette vidéo et laissez un commentaire sur la vidéo en disant ce que vous aimeriez me voir construire ensuite. Le 1er septembre, je sélectionnerai au hasard le commentaire d'un abonné et je l'enverrai gratuitement ! Merci les gars d'être une communauté si accueillante !
Code
- Printed_Stepper_Motor.ino
Printed_Stepper_Motor.inoTexte brut
/*010100000111001001101111011101000110111100100000010001113D Printed Stepper MotorCréé le 15 août 2015Modifié le 15 août 2015par Anthony Garofalo (Proto G)Visitez ma chaîne YouTube ici :/www.instructables.com/member/Proto+G/ _____ ______ _____ ______ _____ ______ |_____] |_____/ | | | | | | ____ | | \_ |_____| | |_____| |_____| 01010000011100100110111101110100011011110010000001000111*/int Delay;int reverseSwitch;void setup() { // initialise la broche numérique 13 comme sortie. pinMode(9, SORTIE); pinMode (10, SORTIE); pinMode(11, SORTIE); pinMode(12, SORTIE); pinMode(13, SORTIE); // broche led pour pinMode visuel (6, INPUT); //l'interrupteur à bascule est connecté à la broche numérique 6 pour inverser la direction }boucle vide() { reverseSwitch =digitalRead(6); if(reverseSwitch ==HIGH){//si le commutateur inverse est haut, faites tourner le rotor dans le sens inverse des aiguilles d'une montre Delay =analogRead(0); Retard =map (Retard, 0, 1023, 60, 2000); digitalWrite(12, HAUT); digitalWrite(13, ÉLEVÉ); retard (Retard); digitalWrite(12, LOW); digitalWrite(13, LOW); retard (5) ; Delay =analogRead(0) ; Retard =map (Retard, 0, 1023, 60, 2000); digitalWrite (11, HAUT); retard (Retard); digitalWrite(11, LOW); retard (5) ; Delay =analogRead(0) ; Retard =map (Retard, 0, 1023, 60, 2000); digitalWrite(10, HAUT); digitalWrite(13, ÉLEVÉ); retard (Retard); digitalWrite(10, LOW); digitalWrite(13, LOW); retard (5) ; Delay =analogRead(0) ; Retard =map (Retard, 0, 1023, 60, 2000); digitalWrite(9, HAUT); retard (Retard); digitalWrite(9, LOW); retard (5) ; } else{//si le commutateur inverse n'est pas haut, faites tourner le rotor dans le sens des aiguilles d'une montre Delay =analogRead(0); Retard =map (Retard, 0, 1023, 60, 2000); digitalWrite(9, HAUT); digitalWrite(13, ÉLEVÉ); retard (Retard); digitalWrite(9, LOW); digitalWrite(13, LOW); retard (5) ; Delay =analogRead(0) ; Retard =map (Retard, 0, 1023, 60, 2000); digitalWrite(10, HAUT); retard (Retard); digitalWrite(10, LOW); retard (5) ; Delay =analogRead(0) ; Retard =map (Retard, 0, 1023, 60, 2000); digitalWrite (11, HAUT); digitalWrite(13, ÉLEVÉ); retard (Retard); digitalWrite(11, LOW); digitalWrite(13, LOW); retard (5) ; Delay =analogRead(0) ; Retard =map (Retard, 0, 1023, 60, 2000); digitalWrite(12, HAUT); retard (Retard); digitalWrite(12, LOW); retard (5) ; } } Pièces et boîtiers personnalisés
Schémas
Processus de fabrication
- Moteur à réluctance
- Moteurs pas à pas
- Carte de circuit imprimé
- Les pilotes intégrés facilitent la conception des moteurs pas à pas
- Prototype Raspoulette
- Tourelle de sentinelle Nerf autonome
- La zone grise entre les servomoteurs et les moteurs pas à pas
- Qu'est-ce qu'un moteur linéaire ?
- Qu'est-ce qu'un servomoteur ?