


Un système d'intelligence artificielle pour identifier des objets dans des scènes encombrées
La vision robotique a parcouru un long chemin, atteignant un niveau de sophistication avec des applications dans des tâches complexes et exigeantes, telles que la conduite autonome et la manipulation d'objets. Cependant, il a encore du mal à identifier des objets individuels dans des scènes encombrées où certains objets sont partiellement ou complètement cachés derrière d'autres. Généralement, lorsqu'ils traitent de telles scènes, les systèmes de vision robotique sont formés pour identifier l'objet occulté en se basant uniquement sur ses parties visibles. Mais une telle formation nécessite de grands ensembles de données d'objets et peut être fastidieuse.
Professeur agrégé Kyoobin Lee et Ph.D. Seunghyeok, étudiant de l'Institut des sciences et technologies de Gwangju en Corée du Sud, s'est retrouvé confronté à ce problème lorsqu'il développait un système d'intelligence artificielle pour identifier et trier des objets dans des scènes encombrées. "Nous attendons d'un robot qu'il reconnaisse et manipule des objets qu'il n'a jamais rencontrés auparavant ou qu'il n'a pas été entraîné à reconnaître. En réalité, cependant, nous devons collecter et étiqueter manuellement les données une par une, car la généralisabilité des réseaux de neurones profonds dépend fortement de la qualité et de la quantité de l'ensemble de données d'entraînement », a déclaré Back.
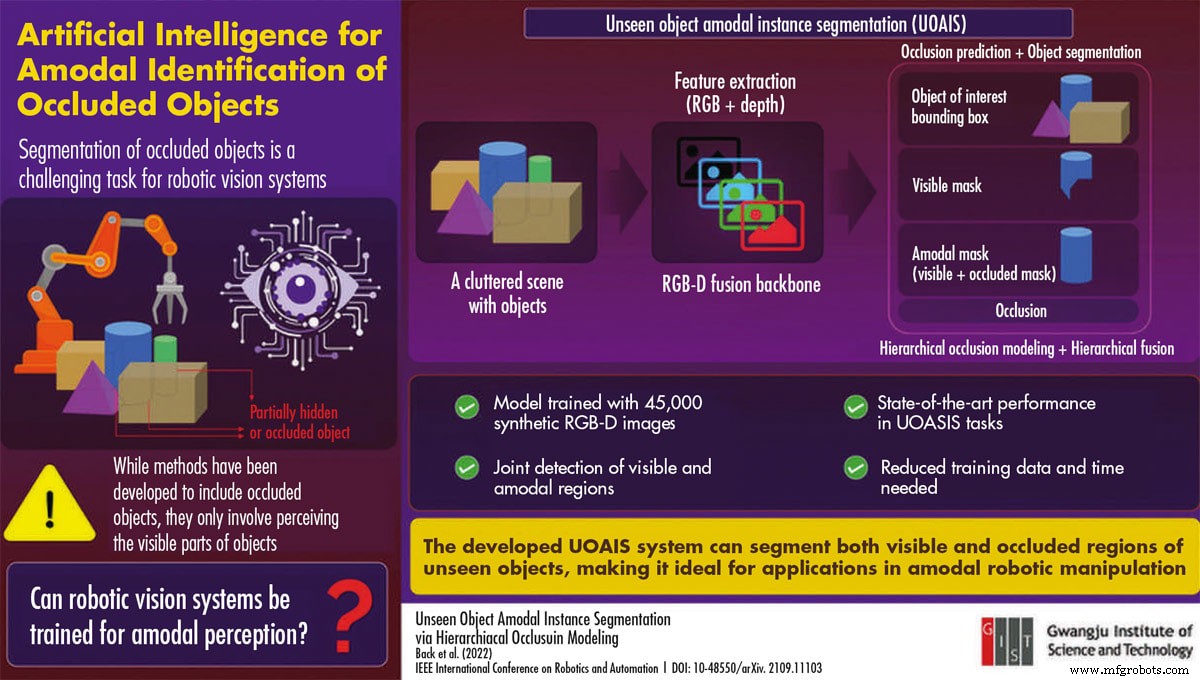
Dans une nouvelle étude, dirigée par les professeurs Lee et Back, ils ont développé un modèle appelé "segmentation d'instance amodale d'objets invisibles" (UOAIS) pour détecter des objets occultés dans des scènes encombrées. Pour entraîner le modèle à identifier la géométrie de l'objet, ils ont développé une base de données contenant 45 000 images synthétiques photoréalistes contenant des informations de profondeur. Avec ces données d'entraînement (limitées), le modèle a pu détecter une variété d'objets occultés. Lorsqu'il rencontre une scène encombrée, il sélectionne d'abord l'objet d'intérêt, puis détermine si l'objet est occulté en segmentant l'objet en un "masque visible" et un "masque amodal".
Les chercheurs ont été enthousiasmés par les résultats. "Les méthodes précédentes se limitaient soit à détecter uniquement des types d'objets spécifiques, soit à détecter uniquement les régions visibles sans raisonner explicitement sur les zones occultées. En revanche, notre méthode peut déduire les régions cachées d'objets occlus comme un système de vision humaine. Cela permet de réduire les efforts de collecte de données tout en améliorant les performances dans un environnement complexe », a déclaré Back.
Pour activer le "raisonnement d'occlusion" dans leur système, les chercheurs ont introduit un schéma de "modélisation d'occlusion hiérarchique" (HOM), qui attribuait une hiérarchie à la combinaison de plusieurs caractéristiques extraites et à leur ordre de prédiction. En testant leur modèle par rapport à trois critères de référence, ils ont validé l'efficacité du système HOM, qui a atteint des performances de pointe.
Les chercheurs sont optimistes quant aux perspectives d'avenir de leur méthode. « Percevoir des objets invisibles dans un environnement encombré est essentiel pour la manipulation robotique amodale. Notre méthode UOAIS pourrait servir de référence sur ce front », a déclaré Back.
Pour plus d'informations, contactez Seulhye Kim, Gwangju Institute of Science and Technology, à Cette adresse e-mail est protégée contre les robots spammeurs. Vous devez activer Javascript pour le voir.; 82-627-156-253.
Système de contrôle d'automatisation
- Bosch ajoute l'intelligence artificielle à l'industrie 4.0
- L'intelligence artificielle est-elle une fiction ou une mode ?
- L'intelligence artificielle reçoit un énorme coup de pouce Kubernetes
- L'intelligence artificielle aide le robot à reconnaître les objets au toucher
- Évolution de l'automatisation des tests avec l'intelligence artificielle
- Comment l'automatisation et l'intelligence artificielle peuvent renforcer la cybersécurité
- Utiliser l'intelligence artificielle pour suivre la déforestation
- Robots d'intelligence artificielle
- L'intelligence artificielle n'est pas une application ; C'est une méthodologie