


Les différences entre les automates et les RTU
La convergence entre les automates programmables (PLC) et les unités terminales distantes (RTU) est relativement nouvelle. En termes de base installée, les automates ont depuis longtemps dépassé les RTU et dominent le marché depuis des décennies, devenant pratiquement des produits de base.
Poussés par cette croissance, de nombreux fournisseurs ont amélioré les fonctionnalités des API et, dans certains cas, ont tenté de s'emparer du marché des RTU en développant des fonctionnalités similaires à celles des RTU pour les API. Cela arrive au point que certains automates sont commercialisés en tant que RTU.
D'autre part, les origines et l'histoire de chaque appareil sont différentes. De leur côté, les RTU ont suivi de près l'évolution des systèmes SCADA dont elles sont des composantes essentielles.
Les SCADA et les RTU ont d'abord été introduits dans l'industrie des télécommunications, puis plus tard dans les centrales électriques dans les années 1950. Le problème qu'ils essayaient de résoudre était la communication de données à partir d'instruments de terrain sur de très longues distances.

Figure 1. Les réseaux de distribution d'énergie s'appuient sur les RTU et SCADA pour surveiller les variables importantes sur de longues distances.
Les automates sont entrés en scène plus tard, au début des années 1970. Les automates programmables ne sont devenus possibles qu'une fois que l'informatique personnelle compacte et les microprocesseurs ont atteint un certain stade, où il était viable de produire en série. Les automates programmables sont entrés directement dans le monde de la fabrication industrielle, remplaçant les circuits complexes et inflexibles constitués de nombreux relais par un appareil compact qui pourrait plus facilement s'adapter aux étages de production. Le secteur de la construction automobile a été parmi les premiers à bénéficier de l'introduction des automates programmables.
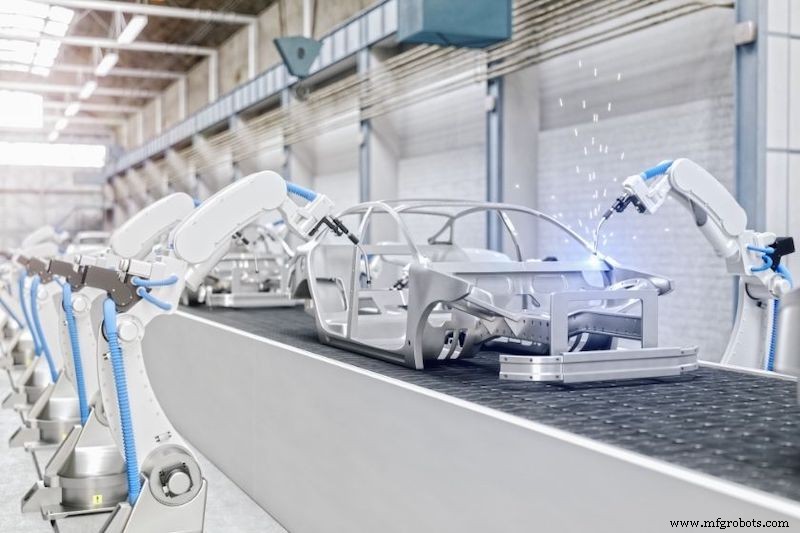
Figure 2. La fabrication automobile hautement automatisée repose sur de nombreux automates.
Qu'est-ce qu'un automate ?
Les automates programmables sont essentiellement des ordinateurs conçus pour l'automatisation des processus industriels. Un automate se compose d'une unité centrale de traitement (CPU) et d'entrées et de sorties. La CPU est responsable de l'exécution du programme installé par l'utilisateur. Plusieurs types de modules peuvent généralement être intégrés à un automate :entrées et sorties numériques et analogiques, communications réseau, adaptateurs de protocole, extensions de bus, entre autres.
Différents langages de programmation peuvent être utilisés pour coder les instructions pour les automates, les plus courants étant le schéma à contacts et le texte structuré. Un schéma à contacts, parfois appelé logique à relais, est un langage de programmation visuel qui émule l'ouverture et la fermeture des contacts et des relais. Le texte structuré utilise une syntaxe similaire aux langages basés sur C. Il permet des instructions plus complexes que l'échelle ; ainsi, il est généralement utilisé dans des applications de contrôle plus complexes.

Figure 3. Un automate Siemens SIMATIC S7-1500, l'un des automates modernes les plus utilisés. Image utilisée avec l'aimable autorisation de Siemens
Chaque API fonctionne en exécutant cycliquement trois tâches de base dans l'ordre :lire les entrées, exécuter le programme et écrire les sorties.
Au début de chaque cycle, l'automate doit mettre à jour l'état de toutes les entrées physiques qui lui sont connectées, afin que l'état correct soit utilisé. Ensuite, le programme préchargé est exécuté, en passant par les routines principales et les sous-routines. Enfin, les sorties physiques sont mises à jour en fonction des résultats de l'exécution du programme. Ceci est fait à chaque cycle de l'API, et le temps de cycle est une métrique clé que les programmeurs essaient fréquemment d'optimiser pour augmenter les performances du système.
Qu'est-ce qu'une RTU ?
Les RTU sont des unités de contrôle à microprocesseur conçues pour surveiller et contrôler les appareils de terrain. Ils sont principalement utilisés dans les systèmes SCADA, prouvant l'interface entre le contrôle SCADA et les processus physiques, leurs capteurs et leur instrumentation. Semblables aux automates, les RTU se composent également de modules CPU et d'entrées et sorties, ainsi que d'options de communication et de traduction de protocole.

Figure 4. Une RTU et des E/S à l'intérieur d'un boîtier. Image utilisée avec l'aimable autorisation d'AIR
La programmation des RTU est généralement beaucoup plus simple que la programmation des automates. La plupart des RTU sont configurés via une interface Web, et pas beaucoup plus que cette configuration n'est effectuée. Bien que les RTU modernes soient compatibles, la plupart ne sont pas destinés ou ne prennent pas en charge les boucles de contrôle et la logique complexe. Les temps de cycle sont extrêmement rapides, généralement de l'ordre de 1 milliseconde.
Comparaison des automates et des RTU
A commencer par la programmabilité, cela peut être vu comme un avantage ou un inconvénient selon la situation. Les RTU, avec leur interface simple, pourraient être considérées comme plus conviviales. En revanche, cette même interface est inflexible pour un système de contrôle complexe et parfois incompatible avec l'application.
Les RTU sont généralement plus volumineux que les automates. L'une des raisons en est les fonctionnalités supplémentaires qui augmentent la durabilité et la robustesse de l'appareil, qui prennent plus de place. La plus importante de ces caractéristiques est le boîtier, qui est nécessaire pour résister aux conditions environnementales difficiles. Les automates programmables sont plus compacts en partie parce qu'ils sont destinés aux industries et aux usines où l'espace disponible n'est normalement pas abondant.
Les RTU sont, en moyenne, plus chères que les automates en raison des exigences de taille et d'endurance. Ceci, cependant, n'est normalement pas un facteur décisif lors du choix d'un type d'appareil. Avec des automates conçus pour les environnements industriels et des RTU pour les systèmes extérieurs longue distance, les considérations de coût sont liées à l'échelle du projet.
En règle générale, les RTU sont mieux adaptées à la surveillance à distance, comme les services publics et les industries agricoles. Pendant ce temps, les automates programmables sont largement utilisés dans toutes les industries et ne seront probablement pas remplacés de sitôt. Même si ces deux appareils présentent des similitudes, ils sont utilisés de différentes manières.
Utilisez-vous plus de RTU ou d'API dans votre travail ? Pourquoi ?
Système de contrôle d'automatisation
- Différences entre les agents en douane mexicains et américains
- Automates, PAC et IPC :quelle est la différence ?
- Quelles sont les différences entre l'entretien et les réparations ?
- Quelle est la différence entre l'industrie 4.0 et l'industrie 5.0 ?
- Les principales différences entre l'usinage 3 axes et 5 axes
- Différences entre SCADA et IHM
- La différence entre les moteurs à courant continu et à courant alternatif
- Delaware :le mix parfait entre humain et IA
- Les différences entre le code G et le code M