


Comment programmer un robot convoyeur sans devenir fou
La programmation d'un robot convoyeur est plus délicate que beaucoup de gens ne l'imaginent. Une bonne simulation est la clé du succès, mais comment y parvenir sans devenir fou ?
Les bandes transporteuses sont un moyen facile de déplacer des produits vers votre robot, n'est-ce pas ?
Eh bien pas vraiment. Nous pensons souvent aux convoyeurs comme une solution simple mais, en réalité, ils sont l'une des méthodes les plus compliquées de livraison de pièces. Ils nécessitent que le robot détecte et suive les objets se déplaçant sur le convoyeur. Ils doivent être contrôlés via le programme du robot. Ils souffrent également de divers problèmes mécaniques au cours de leur vie, comme un mauvais suivi, l'usure de la courroie et le glissement. Tout cela signifie que les convoyeurs peuvent vous rendre un peu fou.
Au lieu d'être simples, ils peuvent être difficiles à utiliser.
Nous ne pouvons pas résoudre les problèmes mécaniques de vos convoyeurs - pour cela, vous avez besoin d'un bon programme de maintenance comme celui indiqué dans cette liste de contrôle pratique de Cisco-Eagle. Cependant, nous pouvons vous aider à simuler facilement le convoyeur afin de pouvoir le tester et l'intégrer à la programmation de votre robot.
Voici comment programmer votre robot convoyeur sans devenir fou.
Les 5 pièces mobiles délicates d'un convoyeur robotisé
Tout d'abord, il est important de comprendre pourquoi la programmation d'un convoyeur est difficile.
Il y a 5 "pièces mobiles" qui rendent difficile l'intégration de la programmation du robot aux convoyeurs.
1. Contrôle du convoyeur lui-même
Il peut sembler que le contrôle du convoyeur n'est qu'un accord "marche/arrêt", mais c'est généralement un peu plus complexe que cela. Les convoyeurs ont une variété d'options de contrôle, selon le modèle. Certains ont une vitesse fixe tandis que d'autres peuvent être contrôlés avec des vitesses variables. Certains ont un mode inversé, un freinage actif ou une commutation rapide. Ensuite, il existe différentes méthodes de contrôle, les trois plus courantes étant le contrôle par impulsion, le contrôle de la vitesse et le contrôle distribué.

Vous devrez peut-être contrôler le convoyeur à l'intérieur du programme du robot lui-même. Sinon, vous devrez peut-être vous connecter au convoyeur via un réseau. Ces deux options ajoutent de la complexité à la programmation.
2. Suivi et détection d'objets
Afin de prélever des objets sur un convoyeur en mouvement, le robot doit pouvoir les localiser de manière fiable. Cela signifie que vous avez besoin d'une sorte de capteur pour détecter quand un objet arrive devant le robot. De plus, le robot peut avoir besoin d'un moyen de suivre les objets pendant que le convoyeur se déplace.
Les capteurs les plus courants pour cela sont les capteurs de vision (par exemple les caméras 2D ou 3D) et les capteurs de détection de pièces (par exemple les faisceaux lumineux, les capteurs magnétiques, les capteurs inductifs, etc.). Certains sont plus simples à intégrer que d'autres, mais tous ajoutent une complexité supplémentaire à votre programme.
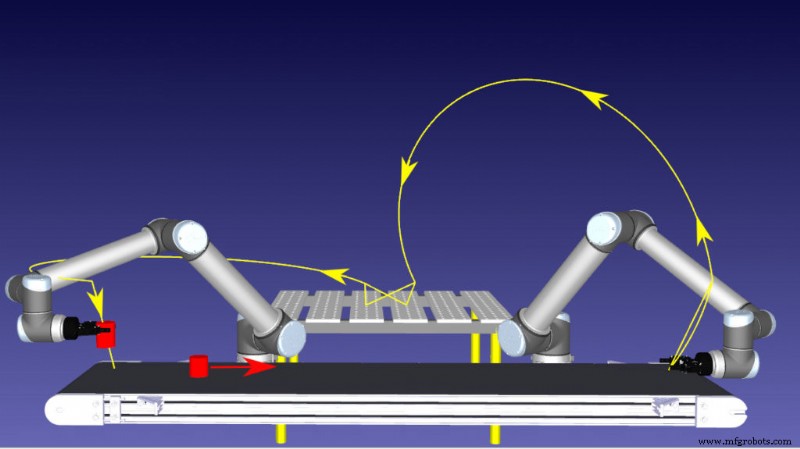
3. Manipuler des objets en mouvement
Une cible en mouvement est toujours plus difficile à manipuler qu'une cible statique. Cela introduit de la complexité lors de la saisie à partir d'un tapis roulant. Le robot doit être capable de se mettre en position, de saisir fermement l'objet et de s'éloigner tandis que de nouveaux objets continuent d'arriver.
La vitesse du convoyeur doit être précisément adaptée à la vitesse du robot, sinon des objets peuvent être manqués. Si vous avez vu la célèbre "scène du chocolat" de la comédie des années 1950 I Love Lucy, vous saurez ce que je veux dire (et la voici si vous ne l'avez pas encore vue).
4. Choix de l'effecteur terminal
Le bras du robot n'est pas la seule partie du système qui doit suivre la cadence. L'effecteur terminal peut avoir un effet significatif sur le temps de cycle et, par conséquent, sur la vitesse du convoyeur. Certains types d'effecteurs finaux sont plus rapides que d'autres.
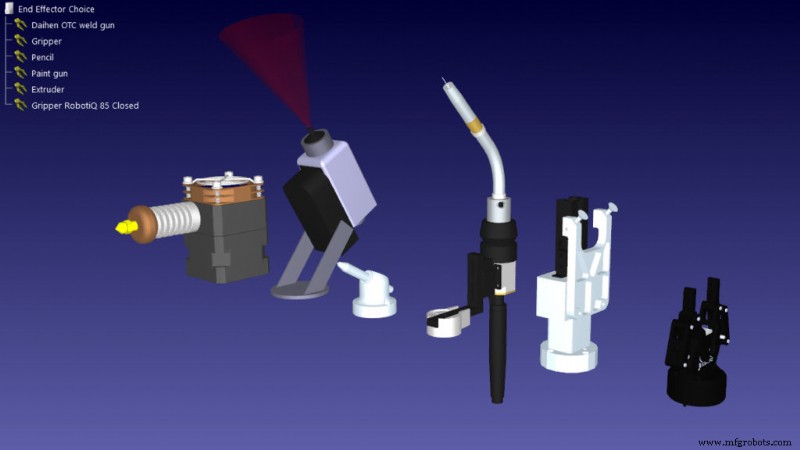
Cela signifie que nous devons maintenant contrôler et coordonner simultanément 3 vitesses indépendantes :la vitesse du convoyeur, la vitesse du bras du robot et la vitesse de préhension de l'effecteur terminal.
5. Utilisation de luminaires
La partie mobile finale n'est en fait pas du tout une partie mobile. Les fixations sont des pièces mécaniques statiques qui sont fixées au convoyeur pour déplacer les objets en position. Ils constituent un moyen fiable de commander les objets sur le convoyeur sans utiliser de capteurs.
Par exemple, vous pouvez utiliser un luminaire comme alternative à l'utilisation d'un capteur de vision. Avec une tôle spécialement formée, vous pouvez canaliser des objets dans une file d'attente statique, permettant au robot de les ramasser sans capteurs supplémentaires. Ils simplifient la programmation, mais augmentent la complexité de la conception mécanique.
Comment simuler un convoyeur avec RoboDK
Vous pouvez surmonter les cinq défis ci-dessus en simulant votre système robotique et en le testant minutieusement avant d'utiliser le système physique. Ce n'est pas toujours facile avec les simulateurs de robots, dont beaucoup n'ont pas la capacité simple d'ajouter des convoyeurs.
Heureusement, les convoyeurs sont assez simples dans RoboDK. Il existe même deux options pour les ajouter, selon le degré de contrôle dont vous avez besoin.
Les deux types de convoyeurs dans RoboDK sont :
Option 1 :programmation Python
La méthode la plus flexible pour créer un convoyeur dans RoboDK consiste à le programmer en Python. Vous pouvez voir cela en action dans l'exemple vidéo Simulation de convoyeur avec RoboDK.
Les avantages de la programmation Python sont :
- C'est très flexible. Le mouvement du convoyeur n'est limité que par vos compétences en programmation. Vous pouvez programmer le convoyeur simulé pour qu'il corresponde aux propriétés de votre bande réelle.
- Il est entièrement personnalisable. Vous pouvez programmer le convoyeur pour qu'il se déplace comme vous le souhaitez. Vous avez un contrôle total sur ses mouvements et sur la manière dont il gère les objets.
- Il permet des convoyeurs plus complexes. Si votre convoyeur dispose de modes de contrôle avancés, ceux-ci peuvent être inclus dans le code python. De plus, si vous avez placé un appareil pour déplacer des objets sur le côté de la ceinture, par exemple, cela peut être programmé dans le code.
Les inconvénients de la programmation Python sont :
- Cela nécessite des compétences en programmation . Il faut savoir programmer en python. C'est l'un des langages les plus faciles à apprendre, mais il nécessite toujours une courbe d'apprentissage si vous n'avez utilisé que l'interface graphique de RoboDK jusqu'à présent.
- Cela prend un peu plus de temps . Par rapport à l'option de mécanisme linéaire, la programmation en python prend du temps. De plus, plus votre convoyeur est complexe, plus il faudra de temps pour le programmer.
Option 2 :mécanisme linéaire
L'autre option consiste à créer un mécanisme linéaire à l'aide de l'assistant « Modèle de mécanisme ». Cela vous permet de créer un convoyeur simple avec un seul axe linéaire.
Les avantages du mécanisme linéaire sont :
- C'est rapide. Vous pouvez créer un mécanisme linéaire en quelques minutes et ajouter très rapidement le convoyeur à votre simulation de robot.
- Il utilise l'assistant graphique. Vous pouvez créer le mécanisme à l'aide de l'assistant en utilisant uniquement des référentiels et des cibles.
- Cela nécessite peu ou pas de programmation. Vous n'avez pas besoin de faire de programmation Python pour créer le convoyeur. Cependant, sachez que vous devrez probablement faire de la programmation pour détecter des objets sur le convoyeur.
Les inconvénients du mécanisme linéaire sont :
- Il est limité. La nature simple du mécanisme signifie que vous ne pouvez modéliser qu'un seul convoyeur à axe.
- C'est inflexible. Cette option rend difficile la modélisation des options de contrôle plus avancées de votre convoyeur. Il est également difficile de détecter la chute d'objets du convoyeur.
Comment démarrer
L'option que vous choisissez dépend en grande partie de ce que vous voulez éviter de programmer en python. À moins que vous n'ayez une bonne raison de choisir le mécanisme linéaire, nous vous recommandons généralement de choisir l'option python. C'est beaucoup plus flexible et - je pense (bien que je sois programmeur) - c'est plus facile à comprendre et à mettre en œuvre.
Quelle que soit l'option que vous choisissez, vous n'avez pas à créer la simulation de convoyeur à partir de zéro.
Nous avons les deux options disponibles en téléchargement dans notre bibliothèque de robots. Sélectionnez simplement "Objet" dans le menu "Type" et vous verrez les deux options :"Modèle Python" pour l'option python ; et "Modèle de mécanisme" pour l'option de mécanisme linéaire.
Si vous êtes bloqué, vous pouvez toujours poster un commentaire sur le forum RoboDK et nous ferons de notre mieux pour vous aider.
Robot industriel
- Comment les robots de pulvérisation améliorent la cohérence
- Comment les robots de peinture réduisent les retouches
- Comment un robot atteint-il une autonomie totale ?
- Convoyeurs fous
- Livre blanc :Comment trouver le potentiel de votre robot
- Guide ultime :Comment choisir un bon robot SCARA
- Comment réduire le temps de formation pour le soudage robotisé
- La bonne façon de simuler un robot convoyeur
- Comment choisir la structure du convoyeur