Fabrication industrielle
Processus de fabrication


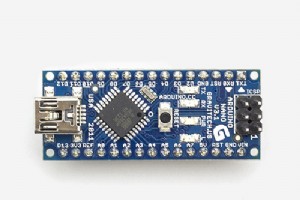
Composants et fournitures Arduino Nano 33 BLE Sense × 1 Périphériques de contrôle nationaux PCA9685 8-Channel 8W 12V FET Driver Valve proportionnelle Contrôleur avec interface I2C × 1 Micro-servomoteur SG90 × 3 Clip de batterie 9V × 1 Outils et mach

Composants et fournitures Moteur CC, 12 V × 1 Commutateur Reed, SPST-NO × 1 Arduino UNO × 1 Kit de protection LCD RGB, affichage 16x2 caractères × 1 Outils et machines nécessaires Kit ProBUDDY À propos de ce projet Arthur Ganson

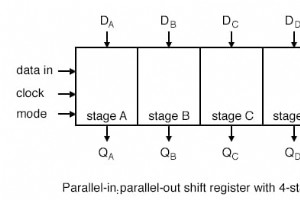
Composants et fournitures Cathode commune diffuse RVB Yeux × 2 Affichage série 7 segments SparkFun - Rouge Minuteur × 1 Texas Instruments Shift Register - Parallèle à Série Affichage à 4 chiffres et 7 segments × 1 LCD alphanumérique, 16 x 2 Affichage du menu ×

Composants et fournitures Arduino Nano 33 IoT × 1 LED (générique) × 4 Actionneur de commutation, tête pour bouton-poussoir à ressort de rappel × 2 LCD alphanumérique, 16 x 2 × 2 Barre LED (10 LED) × 2 Outils et machines nécessaires Fer

Composants et fournitures Arduino UNO × 1 Seed Base Shield V2 × 1 Panneau de déploiement NodeMCU ESP8266 × 1 Capteur dintensité des graines × 1 Seeed Grove - Capteur de qualité de lair v1.3 × 1 Seed Grove - Capteur de température et dhumidité

Composants et fournitures Arduino UNO × 2 Transistor MOSFET, Commutation × 2 Haut-parleur :3 W, 4 ohms × 4 Résistance 1k ohm Résistances 0,25 W × 2 SparkFun Breadboard Alimentation Stick 5V/3.3V × 1 Câbles de raccordement (générique) ×
Composants et fournitures Arduino Nano R3 × 1 Ruban LED adressable Digilent WS2812 × 1 Bouton-poussoir, momentané × 2 Potentiomètre rotatif (générique) × 2 LED 5 mm :Rouge × 1 Résistance à trou traversant, 470 ohm × 1 Outils et
Ajout dune alternative beaucoup moins chère à la référence des conceptions Carter et Kaya à laide dun ensemble Lego EV3. Dans ce projet, je documenterai la construction dun véhicule à chenilles fabriqué avec des pièces et des moteurs Lego Technic, amélioré avec LiDAR et contrôlé par une carte Jetso
Simple Pi Robot vise à mettre le contrôle du robot sous une forme simple. Simple Pi Robot vise à mettre le contrôle du robot sous une forme simple. La liste des pièces (1) Raspberry pi (tout modèle) mais avec le lancement récent de pizero ou pi 2 devrait être une bonne option, mon modèle actuel
Il sagit dune plate-forme robotique mobile simple et bon marché conçue pour lapprentissage et lextension. Jai expliqué mon concept et aussi mes problèmes que jai résolus. Je suis ingénieur logiciel embarqué dans une entreprise automobile allemande. Jai commencé ce projet en tant que plate-forme da
Présentation Le Raspberry Pi est un petit ordinateur monocarte avec connectivité USB, WiFi, Bluetooth, Ethernet, HDMI,Audio et GPIO. Dans cs424, nous contrôlerons une création iRobot à laide dunRaspberry Pi 3 Model B. Ce modèle particulier est le plus performant par rapport aux autresmodèles. Il pos
A. OBJECTIF Pour construire le système logiciel du raspberry pi à lintérieur de Sonbi etintégrer le Microsoft Kinect sur Raspberry pi et le rendreinteractif avec le robot Sonbi dune manière lorsque les gens se tiennent devantKinect, le robot Sonbi agite ses bras vers les gens. B. SYSTÈME MATÉRIEL
Les voitures autonomes avancées ont une signification révolutionnaire pour lindustrie automobile. Alors que de plus en plus dentreprises ont déjà commencé à construire leurs propres voitures autonomes, personne na encore mis sur le marché une voiture autonome pratique. Lun des principaux problèmes d
1. PRÉSENTATION Avec lavènement du commerce électronique, la demande de produits a augmenté et les entreprises ont besoin de stocks importants et doivent gérer quotidiennement de gros volumes. Cela inclut de nombreuses tâches à forte intensité de main-dœuvre telles que le stockage, le déplacement,
1. Présentation Linfrastructure de notre pays vieillit et se détériore rapidement. À lheure actuelle, il nexiste aucun mécanisme pour inspecter en profondeur létat de nos ponts, réservoirs de déchets, pipelines et réacteurs. Bon nombre de ces structures ont atteint la fin de leur durée de vie nomin
Présentation Au fur et à mesure que la technologie progresse, le traitement dimages est utilisé dans de nombreuses applications, notammentau sein de la robotique. Des exemples de traitement dimages peuvent être trouvés dans les véhicules autonomes etles robots commerciaux. La compétition Robogames q
Porte dérobée cellulaire avec Hologram Nova sur Raspberry Pi flask-ask server-Amazon Alexa contrôlé. Histoire Motivation Notre projet précédent avec lARDrone 2.0 nous a aidé à découvrir un nouveau projet. Notre participation actuelle au Alexa et Arduino Smart Home Challenge nous a présenté les comp
Un robot ROS simple qui peut naviguer avec des commandes de terminal. Introduction Ce projet vise à créer un robot exécutant ROS qui nous permet de transformer nimporte quelle plate-forme matérielle de robot générique en un robot intelligent. https://youtu.be/nTAU5yGOXnI https://youtu.be/NKvj2
Robot qui conduit en utilisant la vision par ordinateur et les commandes vocales. Vous êtes sur le point de vous lancer dans un voyage, et nous sommes ravis den faire partie ! Préparez-vous à créer et programmer votre robot à laide de Windows 10 IoT Core ! Et attendez il y a plus ! Vous pouvez fa
Un kit open source pour construire un dinosaure robot intelligent marchant. Maintenant open source sur GitHub : https://github.com/JacquinBuchanan/Intellisaurus QUE PUIS-JE FAIRE AVEC INTELLISAURUS ? Intellisaurus est destiné à de nombreux niveaux de compétence. Les instructions faciles à sui
Processus de fabrication