


Main prothétique imprimée en 3D avec détection tactile capacitive
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Dans ce projet, je suis venu avec une idée qui peut être mise en œuvre sur des prothèses de mains existantes imprimées en 3D. Dans les prothèses électriques existantes, je n'ai pas trouvé l'utilisation de la technologie de détection tactile capacitive pour l'actionnement des doigts . Ce projet combine deux choses très intéressantes, Arduino avec détection tactile capacitive pour l'actionnement et remix de la main e-NABLE Phoenix conception.
Fondamentalement, la main Phoenix est une main alimentée par le corps. Ce que j'ai fait sur ce projet, c'est que je l'ai converti en une prothèse électrique en choisissant la conception des pièces requises.
L'avantage de la détection tactile capacitive est que, grâce au toucher, vous pouvez facilement actionner les doigts. Actuellement, ce modèle ne peut pas contrôler les doigts individuels et plus de développement est nécessaire dans la capacité de charge et la capacité de préhension.
Rassemblez les pièces :
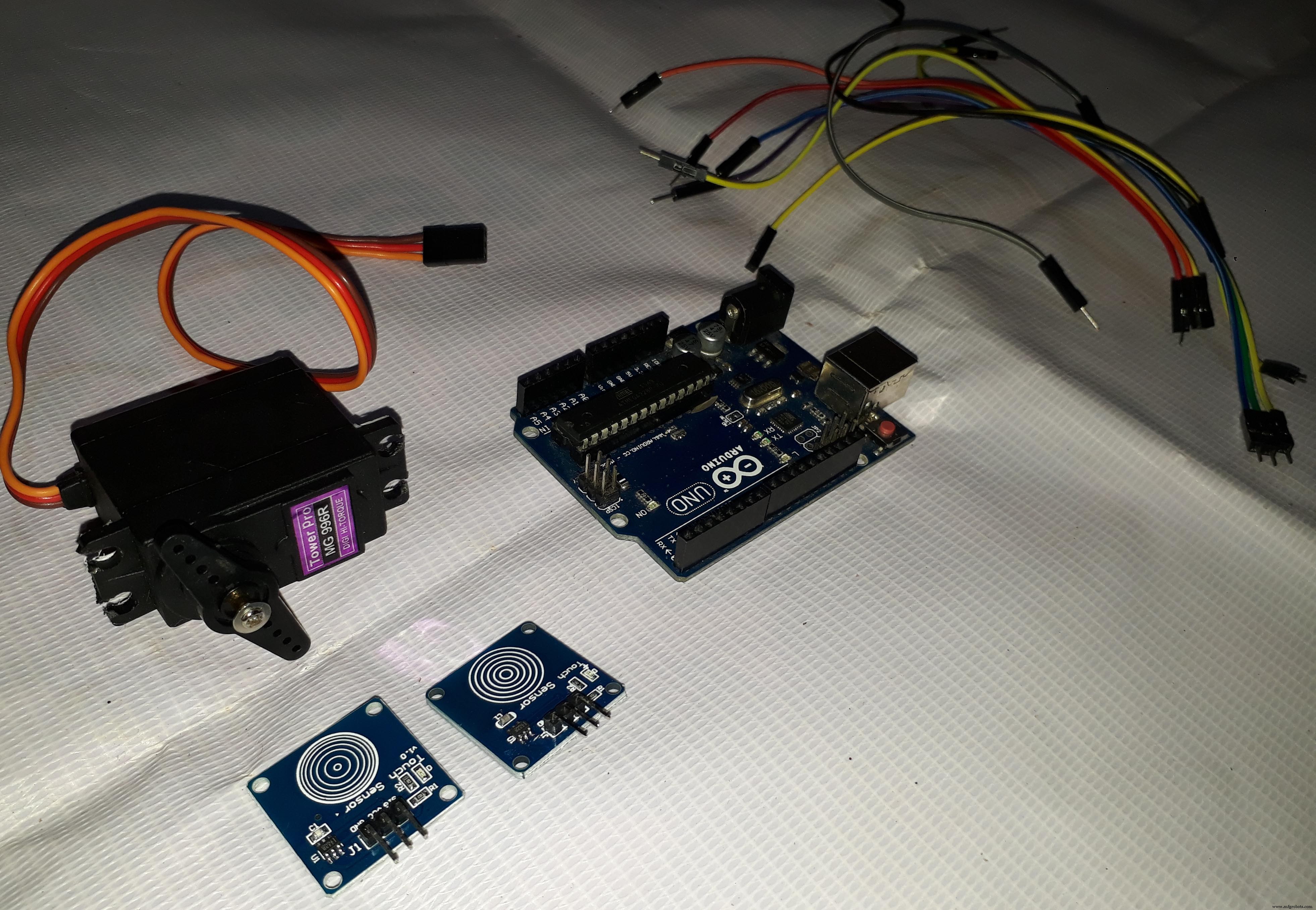
- Arduino Uno
- Capteur tactile TTP223 -2
- Servomoteur MG996R
Assemblage de Phoenix Hand :
Les détails d'assemblage de la main Phoenix sont mentionnés dans les étapes suivantes...
J'ai utilisé flexor comme ligne de pêche et extenseur comme élastiques
Outils :
- Imprimante 3D
- Pistolet à colle
Impression de la main :
Ce projet utilise e-NABLE précédemment conçu Main de Phénix.
Selon mes besoins, j'ai imprimé uniquement les parties suivantes
Doigts
- finger_phalanx.stl -4 pièces
- fingertip_long.stl -2 pièces
- fingertip_short.stl -2 pièces
- thumb_phalanx.stl -1 pièce
- thumbtip.stl -1 pièce
Paume
- palm_right_new_supports.stl -1 pièce
Épingles à pression
- fingertip_pin.stl - 4 pièces
- knuckle_pin_long.stl -1 pièce
- knuckle_pin_short.stl -2 pièces
- thumb_knuckle_pin.stl - 1 pièce
- thumbtip_pin.stl - 1 pièce
Comme il existe déjà des instructions détaillées sur la façon de construire cela, je n'entrerai pas dans les détails
Pour l'impression, j'ai utilisé une imprimante 3D Flsun. Au total, il a fallu 10 à 12 heures pour imprimer
(remarque :ces pièces sont pour une main droite)
Assemblage de la main :
Le processus de construction de la main Phoenix est déjà disponible, je n'entrerai donc pas dans les détails. En cas de doute, n'hésitez pas à laisser un commentaire.
J'ai utilisé le fléchisseur comme ligne de pêche et l'extenseur comme élastique.
** un lissage peut être nécessaire pour un ajustement en douceur
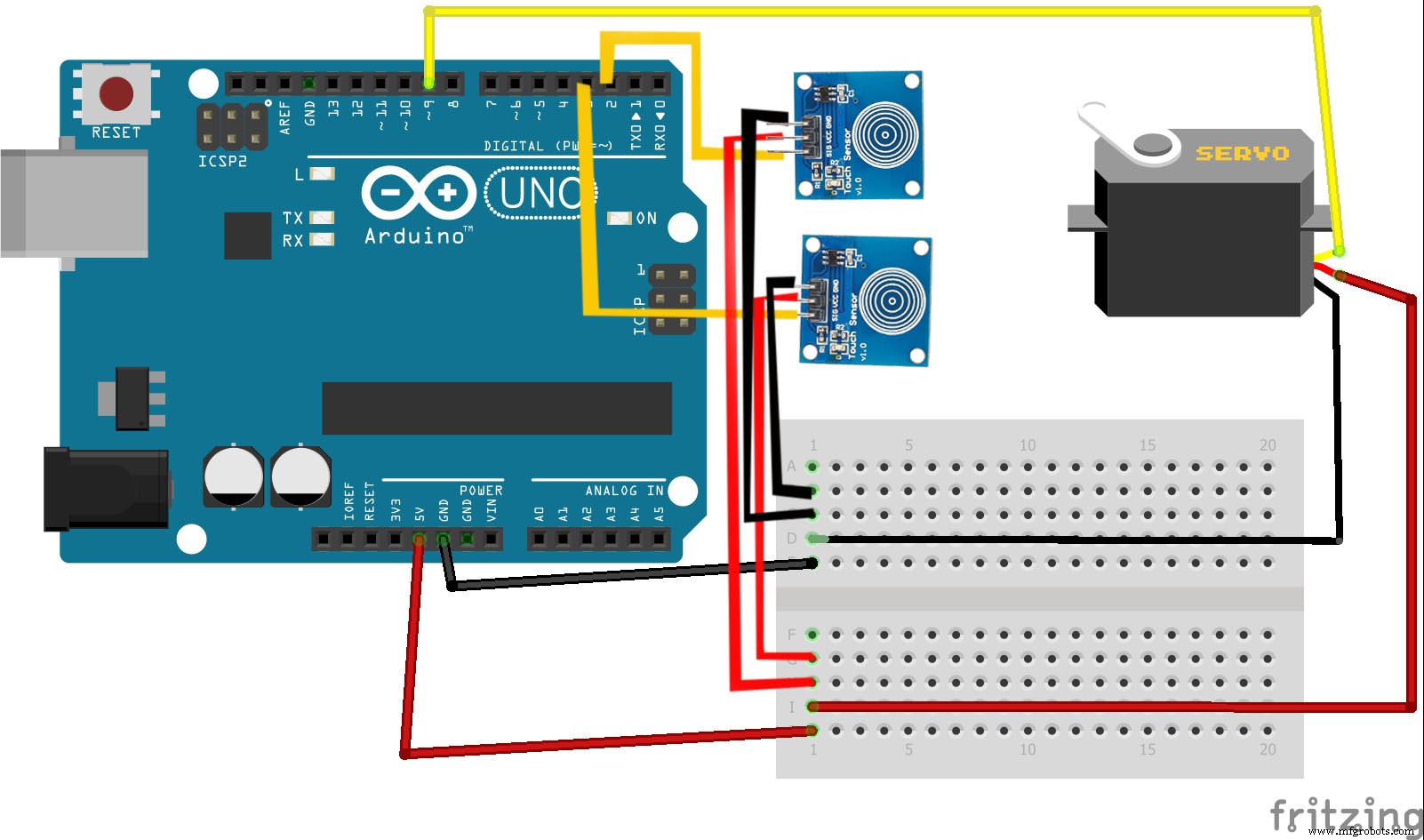
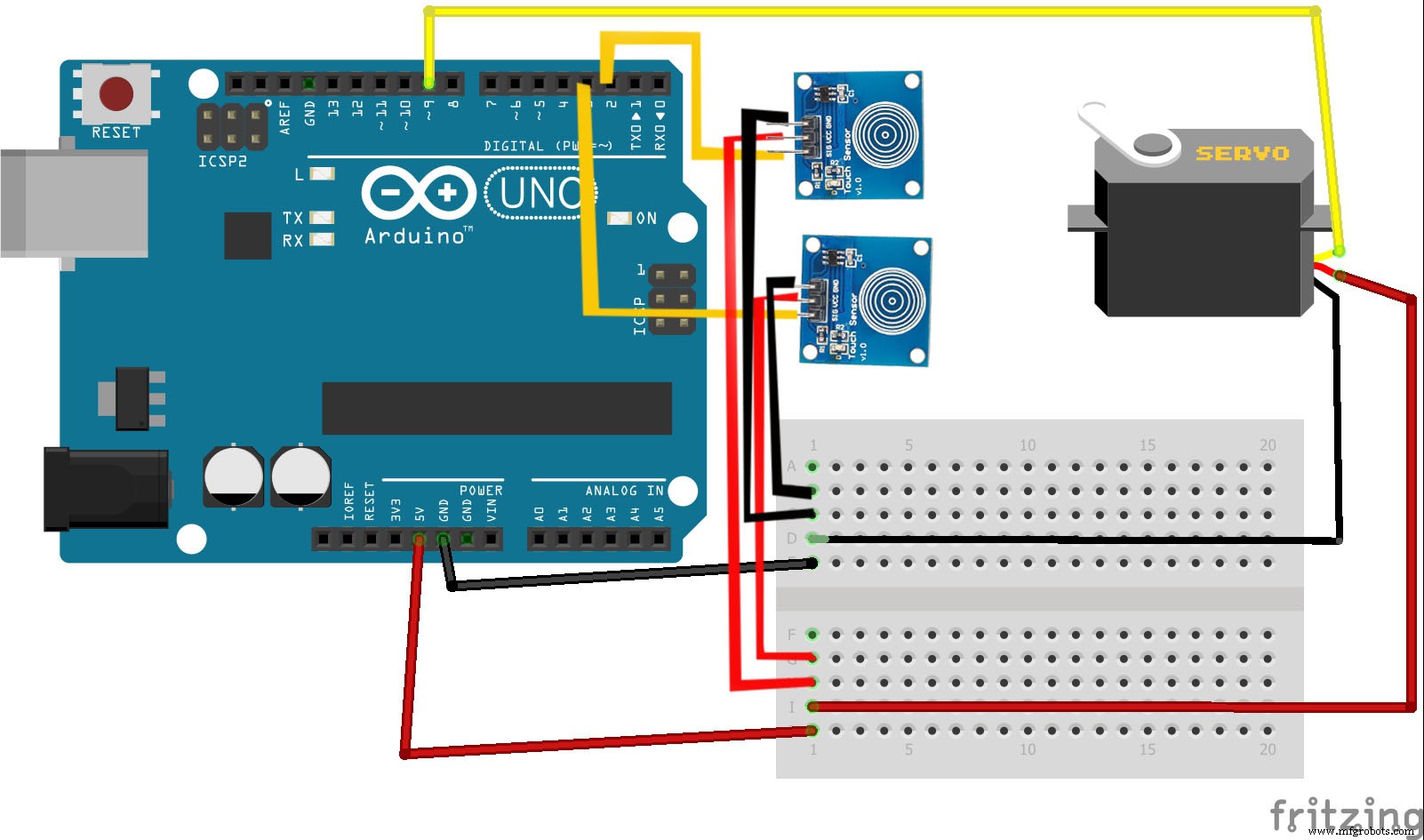
Pièces électroniques :
L'actionnement est contrôlé par 2 capteurs tactiles (TTP223), l'entrée du capteur tactile ouvre et ferme les doigts via un servomoteur.
Schéma de circuit et code Arduino :
Heureux faire !
Merci beaucoup d'avoir lu si vous avez besoin de plus d'informations, n'hésitez pas à demander dans les commentaires, et je ferai de mon mieux pour vous répondre.
Code :
#include Servo myservo ; #define CTS1Pin 2 // Broche pour capteur tactile capacitif 1#define CTS2Pin 3 // Broche pour capteur tactile capacitif 2int pos;void setup() { myservo.attach(9); // attache le servo sur la broche 9 à l'objet servo}void loop() {int CTSValue1 =digitalRead(CTS1Pin);int CTSValue2 =digitalRead(CTS2Pin);if (CTSValue1 ==HIGH){ for (pos =0; pos <=180 ; pos +=1) monservo.write(pos); retard (15); } if(CTSValue2==HIGH) { for (pos =180; pos>=0; pos -=1) myservo.write(pos); retard (15); }} Code
- Esquisse Arduino
Arduino SketchArduino
#includeServo myservo ; #define CTS1Pin 2 // Broche pour capteur tactile capacitif 1#define CTS2Pin 3 // Broche pour capteur tactile capacitif 2int pos;void setup() { myservo.attach(9); // attache le servo sur la broche 9 à l'objet servo}void loop() {int CTSValue1 =digitalRead(CTS1Pin);int CTSValue2 =digitalRead(CTS2Pin);if (CTSValue1 ==HIGH) { for (pos =0; pos <=180 ; pos +=1) monservo.write(pos); retard (15); } if(CTSValue2==HIGH) { for (pos =180; pos>=0; pos -=1) myservo.write(pos); retard (15); } }
Schémas
Processus de fabrication
- Carte de circuit imprimé
- Finir des pièces imprimées en 3D avec… des crayons ?
- Introduction aux accéléromètres capacitifs :mesure de l'accélération avec la détection capacitive
- Les prothèses imprimées en 3D sont l'avenir
- Divide By Zero présente des cartes imprimées en 3D DIY avec Google Maps
- Meilleur contrôle qualité avec les pièces imprimées en 3D
- Transformation de la chaîne d'approvisionnement avec une touche humaine
- Tour standard avec commandes à écran tactile
- Détection tactile universelle avec conducteurs à couplage électromécanique