


Introduction aux accéléromètres capacitifs :mesure de l'accélération avec la détection capacitive
Dans cet article, nous expliquerons comment utiliser la détection capacitive pour mesurer l'accélération.
Les accéléromètres sont utilisés dans différents domaines d'application. Par exemple, dans les applications automobiles, des accéléromètres sont utilisés pour activer le système d'airbag. Les appareils photo utilisent des accéléromètres pour la stabilisation active des images. Les disques durs des ordinateurs s'appuient également sur des accéléromètres pour détecter les chocs externes qui peuvent endommager la tête de lecture/écriture de l'appareil. Dans ce cas, l'accéléromètre suspend le fonctionnement du variateur lorsqu'un choc externe se produit. Ce ne sont que quelques applications d'accéléromètre.
Les possibilités sont en fait infinies pour ce que ces appareils peuvent être utilisés. Les énormes progrès des technologies de micro-fabrication ont permis de créer les petits accéléromètres micro-usinés à faible coût d'aujourd'hui. En fait, la petite taille et le faible coût sont deux des principaux facteurs qui nous permettent d'appliquer ces appareils à un si large éventail d'applications.
Dans cet article, nous examinerons la physique de la mesure de l'accélération. Nous verrons comment une structure masse-ressort-amortisseur (également connue sous le nom de masse-amortisseur-ressort) peut convertir l'accélération en une quantité de déplacement et comment l'approche de détection capacitive peut être appliquée pour convertir ce déplacement en un signal électrique proportionnel à la accélération appliquée.
Mesure de l'accélération à l'aide d'un amortisseur masse-ressort
Une structure masse-ressort-amortisseur comme le montre la figure 1 peut être utilisée pour mesurer l'accélération.
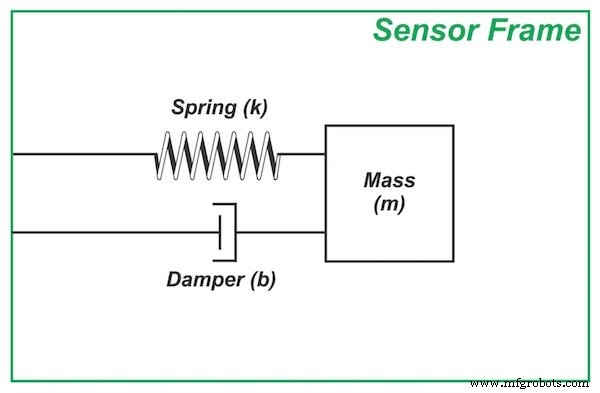
Figure 1. La structure masse-ressort-amortisseur
Une quantité connue de masse, communément appelée masse étalon (ou masse d'essai), est reliée au cadre du capteur par un ressort.
Bien que l'amortisseur soit un composant essentiel de ce système, nous le laisserons de côté jusqu'au prochain article de cette série car il pourrait être un peu mystérieux pour les EE et quelques paragraphes pourraient être nécessaires pour présenter les concepts de base d'un amortisseur.
Voyons comment la structure illustrée à la figure 1 peut détecter l'accélération.
Lorsque le cadre du capteur accélère en raison d'une force externe, la masse étalon a tendance à « rester en arrière » en raison de son inertie. Cela modifie la position relative de la masse étalon par rapport au cadre du capteur, comme illustré ci-dessous.
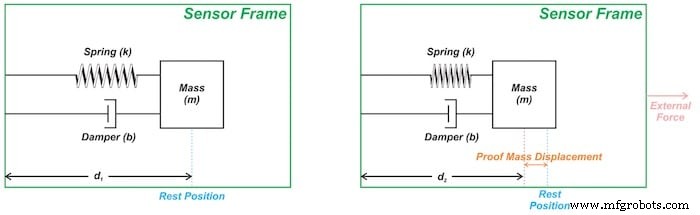
Figure 2. (a) La masse étalon est à sa position de repos lorsqu'il n'y a pas de force externe. (b) Lorsque le cadre accélère vers la droite, l'observateur dans le cadre du capteur constate que la masse étalon est déplacée vers la gauche de sa position de repos.
La figure 2(a) montre la masse étalon à sa position de repos lorsqu'il n'y a pas de force externe. Lorsqu'une force externe est appliquée au cadre, comme illustré à la figure 2(b), le cadre accélère vers la droite. La masse étalon a initialement tendance à rester au repos, ce qui modifie la position relative de la masse étalon par rapport au référentiel (d2
Un observateur dans le référentiel non inertiel (c'est-à-dire en accélération) du capteur observe que la masse étalon est déplacée vers la gauche de sa position de repos. Le ressort se comprime à cause du déplacement de la masse étalon et exerce une force proportionnelle au déplacement sur la masse étalon. La force exercée par le ressort pousse la masse étalon vers la droite et la fait accélérer dans le sens de la force extérieure.
Si des valeurs appropriées sont choisies pour les différents paramètres du système, le déplacement de la masse d'épreuve sera proportionnel à la valeur de l'accélération du cadre (après la disparition de la réponse transitoire du système).
Pour résumer, une structure masse-ressort-amortisseur convertit l'accélération du cadre du capteur en déplacement de masse d'épreuve. La question qui reste est, comment pouvons-nous mesurer ce déplacement ?
Mesure du déplacement de masse d'épreuve :approche de détection capacitive
Le déplacement de la masse étalon peut être mesuré par plusieurs moyens. Une méthode courante est l'approche de détection capacitive illustrée à la figure 3.
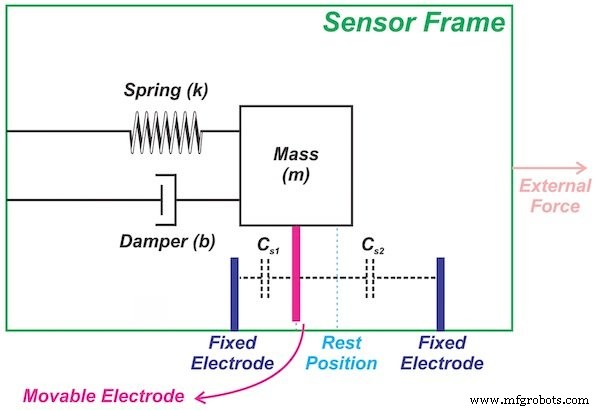
Figure 3
Il y a deux électrodes fixées au cadre du capteur ainsi qu'une électrode mobile connectée à la masse étalon. Cela crée deux condensateurs, Cs1 et Cs2 , comme le montre la figure 3.
Lorsque la masse étalon se déplace dans une direction, la capacité entre l'électrode mobile et l'une des électrodes fixes augmente tandis que la capacité de l'autre condensateur diminue. C'est pourquoi nous avons seulement besoin de mesurer les changements dans les condensateurs de détection pour détecter le déplacement de la masse d'épreuve, qui est proportionnel à l'accélération d'entrée.
Conditionnement du signal de l'accéléromètre utilisant la démodulation synchrone
Pour mesurer avec précision les changements dans les condensateurs de détection, nous pouvons appliquer la technique de démodulation synchrone. La figure 4 montre une version simplifiée du conditionnement de signal utilisé dans la famille d'accéléromètres ADXL d'Analog Devices.
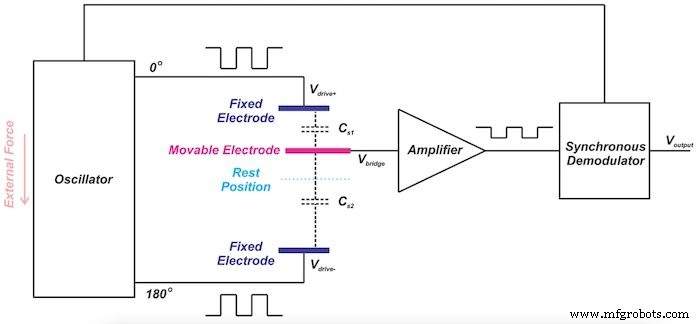
Figure 4. Image (adapté) avec l'aimable autorisation d'Analog Devices
Dans ce cas, une onde carrée de 1 MHz est utilisée comme excitation CA des condensateurs de détection Cs1 et Cs2 . Les ondes carrées appliquées aux électrodes fixes ont la même amplitude mais sont déphasées de 180° les unes par rapport aux autres. Lorsque l'électrode mobile est en position de repos, la tension à l'entrée de l'amplificateur est de zéro volt.
Lorsque l'électrode mobile se rapproche de l'une des électrodes fixes, une plus grande partie de la tension d'excitation de cette électrode apparaît à l'entrée de l'amplificateur Vpont , ce qui signifie que l'onde carrée qui apparaît à l'entrée de l'amplificateur est en phase avec la tension d'excitation de l'électrode la plus proche.
Par exemple, sur la figure 4, la sortie amplifiée est une onde carrée en phase avec Vdrive+ car Cs1 est plus grand que Cs2 .
L'amplitude du Vpont est une fonction du déplacement de la masse d'épreuve ; cependant, nous avons également besoin de connaître la relation de phase de Vbridge par rapport à Vdrive+ et Vdrive- pour déterminer dans quelle direction la masse étalon est déplacée.
Le démodulateur synchrone multiplie essentiellement la sortie de l'amplificateur par la tension d'excitation (soit Vdrive+ ou Vdrive- ) pour convertir l'onde carrée à la sortie de l'amplificateur en une tension continue qui révèle la quantité de déplacement ainsi que sa direction.
Pour savoir comment la démodulation synchrone y parvient, veuillez vous référer à mon article sur les techniques de démodulation LVDT :Démodulation LVDT :Rectifier-Type vs. Synchronous Demodulation.
Pourquoi n'utilisons-nous pas un condensateur à détection unique ?
La détection capacitive, représentée sur la figure 3, a une nature différentielle :lorsque Cs1 augmente, Cs2 diminue, et vice versa.
Il est également possible d'utiliser une détection capacitive asymétrique où l'une des électrodes fixes est omise, ainsi, il n'y a qu'un seul condensateur variable. Dans ce cas, nous pouvons modéliser le système comme le montre la figure 5.
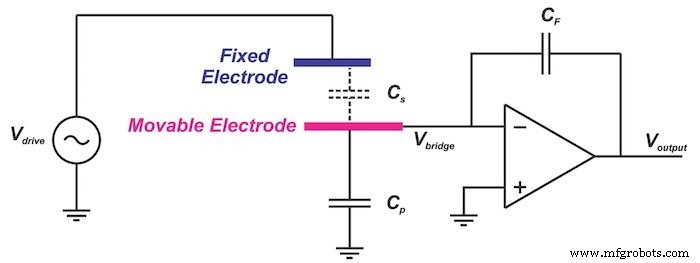
Figure 5
Cette version asymétrique semble être une solution plus simple. Alors, pourquoi n'utilisons-nous pas un seul condensateur de détection ?
Structure de condensateur à détection unique :sortie non linéaire
Examinons ce circuit de plus près.
Dans la figure ci-dessus, Cp modélise la capacité parasite totale de l'électrode mobile à la terre. Idéalement, Vpont est au sol virtuel et nous pouvons ignorer Cp car il a la terre d'un côté et la terre virtuelle de l'autre.
Par conséquent, la sortie peut être simplement obtenue comme :
\[ V_{output} =-\frac{C_s}{C_F} V_{drive}\]
Équation 1
Notez que le chemin du courant de polarisation n'est pas représenté sur la figure 5. En utilisant l'équation de base du condensateur, nous pouvons exprimer la sortie en termes de déplacement de masse d'épreuve.
Pour un condensateur C, on a :
\[ C =\epsilon \frac{A}{d}\]
Équation 2
où est la permittivité diélectrique, A est la surface de plaque parallèle et d est la distance entre les deux plaques conductrices. Pour simplifier, supposons que les deux condensateurs Cs et CF ont les mêmes ε et A.
L'équation 1 peut alors se simplifier en :
\[ V_{output} =-\frac{d_F}{d_s} V_{drive}\]
où dF et ds désigne la distance entre les électrodes de CF et Cs , respectivement. ds peut être exprimé comme la somme d'une distance initiale d0 et la valeur de déplacement Δd.
De là, nous pouvons obtenir :
\[ V_{output} =-\frac{d_F}{d_0 + \Delta d} V_{drive}\]
Comme vous pouvez le voir, le terme de déplacement (Δd) est au dénominateur de l'équation de sortie. Par conséquent, la sortie est une fonction non linéaire du déplacement de la masse d'épreuve Δd.
Structure différentielle :sortie linéaire
Examinons la fonction de transfert de la détection capacitive différentielle illustrée à la figure 4.
Vous pouvez vérifier qu'avec la détection capacitive différentielle, le Vpont est donné par :
\[ V_{bridge} =\frac{C_{s1} V_{drive+} + C_{s2} V_{drive-}}{C_{s1} + C_{s2 }} \]
En appliquant l'équation 2 et en supposant que les deux condensateurs Cs1 et Cs2 ont les mêmes valeurs ε et A, on obtient :
\[ V_{bridge} =\frac{d_{s2} V_{drive+} + s_{s1} V_{drive-}}{d_{s1} + d_{s2 }} \]
Équation 3
où ds1 et ds2 désigne la distance entre les électrodes de Cs1 et Cs2 , respectivement. Quand ds1 augmente, ds2 diminue du même montant et vice versa.
En supposant que :
\[ d_{s1} =d_0 - \Delta d \]
\[ d_{s2} =d_0 + \Delta d \]
\[ V_{drive+} =- V_{drive-} \]
L'équation 3 se simplifie en :
\[ V_{bridge} =\frac{\Delta d}{d_0} V_{drive+} \]
Comme vous pouvez le voir, avec une structure différentielle, la tension de sortie est une fonction linéaire du déplacement de la masse d'épreuve Δd. Notez que, bien que nous puissions utiliser un logiciel pour supprimer les erreurs de linéarité du capteur, une réponse linéaire est souhaitable car elle augmente la précision de la mesure et facilite l'étalonnage du système.
Conclusion
Nous avons vu comment une structure masse-ressort-amortisseur peut convertir l'accélération en une quantité de déplacement et comment l'approche de détection capacitive peut être appliquée pour convertir ce déplacement en un signal électrique proportionnel à l'accélération appliquée.
Nous avons également brièvement mentionné que, pour que le déplacement de la masse d'épreuve soit proportionnel à l'accélération appliquée, différents paramètres du système masse-ressort-amortisseur doivent être choisis de manière appropriée.
Dans le prochain article, nous dériverons la fonction de transfert du système masse-ressort-amortisseur pour mieux comprendre le fonctionnement du système.
Pour voir la liste complète de mes articles, veuillez visiter cette page.
Capteur
- Truphone permet des déploiements IoT de masse avec iSim Collaboration
- Würth :capteur d'accélération 3 axes avec fonctionnalités prédéfinies
- Mesure de la température avec RASPBERRY PI
- Vous n'arrivez pas à faire face à une masse de réclamations clients ? L'IA à la rescousse
- Détection tactile universelle avec conducteurs à couplage électromécanique
- Accéléromètre à lumière laser
- Vitesse ou accélération ? quoi de plus important avec la découpe au jet d'eau
- Une introduction à la soudeuse par points à décharge capacitive
- Préréglage d'outil CNC et mesure d'outil CNC une introduction