


Robot chasse-neige
Composants et fournitures
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 6 |
À propos de ce projet
Pourquoi j'ai voulu faire un SnowPlow Robot ?Comme je ne suis pas insensible aux solutions pour se faciliter la vie, j'ai envisagé l'idée de créer et de proposer une solution qui pourrait aider les gens à éviter les températures froides de l'hiver et la fatigue d'utiliser la pelle manuelle traditionnelle pour enlever la neige de la passerelle. Pour ce faire, j'ai opté pour quelque chose d'amusant et de technologique. De cette façon, j'ai décidé de commencer à développer un robot chasse-neige, télécommandé, doté d'une mécanique solide, d'une électronique de contrôle et de moteurs électriques puissants. Le résultat est une version miniature d'un vrai chasse-neige avec des chenilles, une lame motorisée (qui peut être soulevée et déplacée) et un projecteur lumineux monté sur le dessus pour éclairer le chemin dans l'obscurité. Le robot peut être contrôlé à distance par la télécommande PlayStation.
Dans la vidéo suivante, vous pouvez voir le robot chasse-neige en action, quelqu'un m'a dit qu'il semble que pour pelleter le robot chasse-neige doit prendre l'élan, C'EST PAS SI , j'ai fait la vidéo pour montrer comment la neige est enlevée.
Comment c'est fait ?
Le robot est composé d'un châssis qui supporte une lame motorisée (qui peut être soulevée et déplacée) et le système de traction composé de moteurs électriques, de roues et de chenilles. Le châssis est réalisé avec des barres de fer à section rectangulaire soudées entre elles. La taille du robot est de 600X375X240 mm, sans la lame, et son poids est d'environ 30 kg.
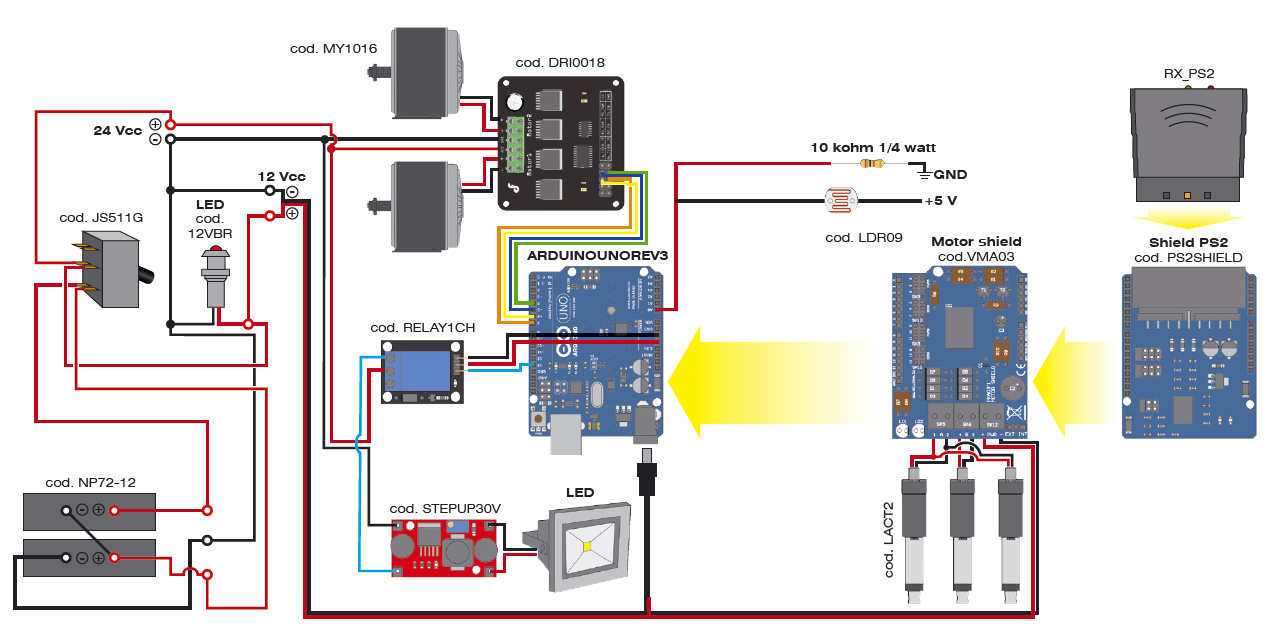

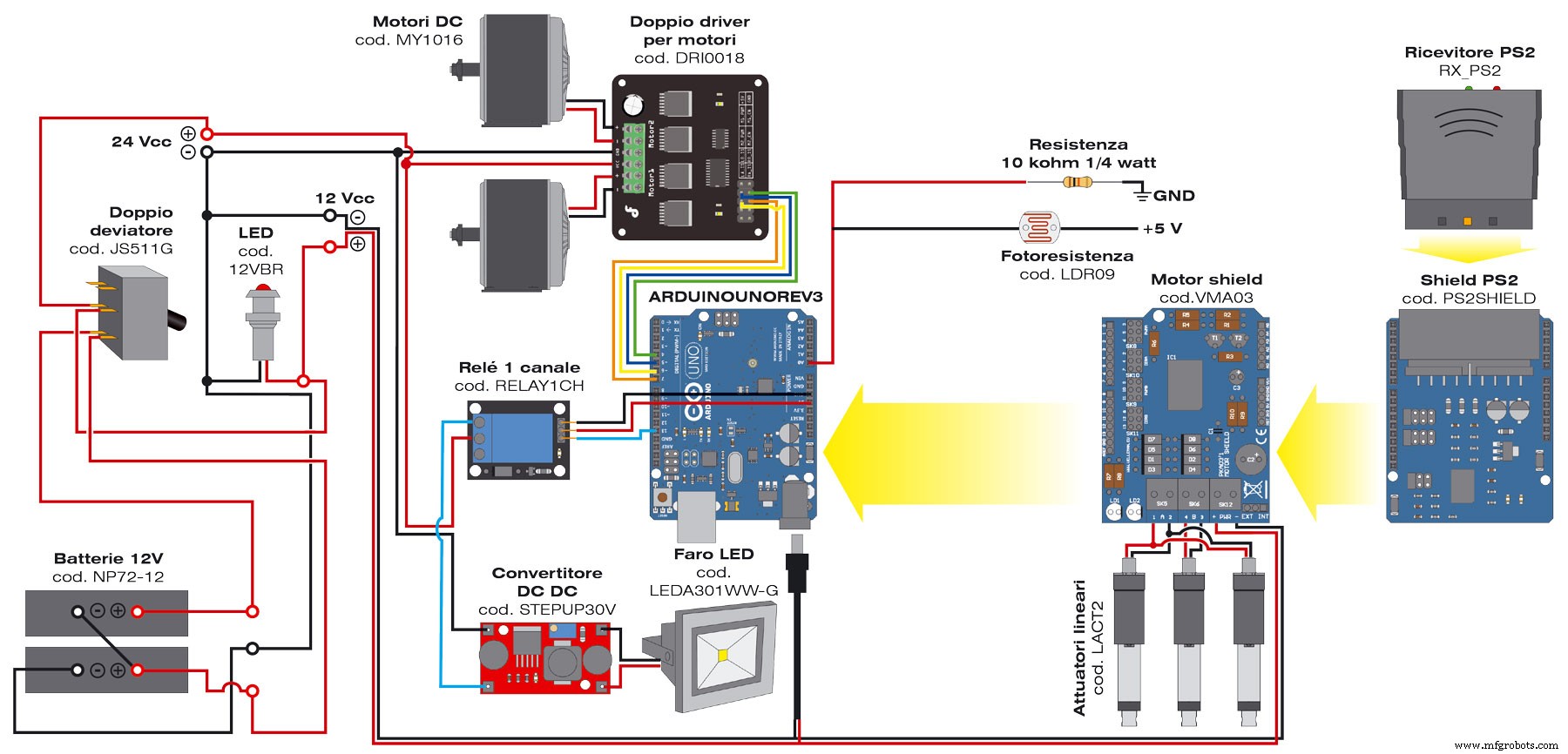
La partie électrique et électronique du chasse-neige est basée sur Arduino Uno, hébergeant trois boucliers et s'interface avec :
- CONDUCTEUR MOTEUR
- CANAL CARTE RELAIS
- Convertisseur DC/DC intensifié
Les shield montés sur Arduino sont le shield moteur pour contrôler les trois moteurs linéaires qui gèrent le mouvement de la lame et le PS2SHIELD, qui permet de s'interfacer avec la PlayStation 2 (PS2); ce dernier nécessite le RX-PS2, qui est un récepteur radio 2,4 GHz pour envoyer/recevoir des commandes spécifiques depuis la console susmentionnée. Le schéma de câblage du robot est ce que vous trouverez dans ces pages; la source d'alimentation est constituée d'une série de deux batteries plomb-gel de 7,2 Ah :on prend le 12 V à partir de la connexion médiane des deux, tandis qu'entre le négatif et le positif de la série on prend 24 volts. Un interrupteur (125V, 2×15 ampères) commande les deux lignes d'alimentation. Avec 12 volts, nous exécutons Arduino, qui alimentera les blindages via sa barrette à broches ; une LED (montant en interne la résistance de limitation) indiquera quand Arduino est en cours d'exécution.
Le 12 volts provenant directement de la pile de batteries alimente également la section d'alimentation du blindage du moteur. En effet, l'absorption des trois actionneurs linéaires (cod. LACT2) étant élevée, il est déconseillé de prendre le 12 V d'Arduino :vous optez pour que l'alimentation externe soit fournie à la borne PWR appropriée. Pour utiliser l'alimentation externe, vous devez déplacer le cavalier (sur le blindage) près de la borne, entre la centrale et l'EXT. La gestion du shield nécessite une librairie spéciale pour Arduino, fournie avec le composant. Chaque actionneur linéaire est composé d'un motoréducteur 12 Vdc utilisant une vis sans fin pour déplacer un arbre d'avant en arrière sur sa longueur (excursion maximale de 5 cm).
L'actionneur a une charge dynamique de 50 kg et une vitesse maximale de 1,3 cm/s. Il est capable de supporter jusqu'à environ 250 kg, à l'arrêt, et le couple assure le maintien de la position de l'arbre même en l'absence de puissance. Deux interrupteurs de fin de course permettent au moteur de s'arrêter lorsqu'il atteint l'extension et la contraction maximales, tandis que les diodes permettent l'inversion de sens après avoir atteint le point limite. L'actionneur est en métal et est scellé pour le protéger de la poussière et de l'eau (indice IP63).
Venons-en maintenant à la ligne d'alimentation 24 volts, qui alimente la partie puissance du chasse-neige, que sont les sections traction et projecteur (en option) :la première est basée sur le pilote du moteur, à connecter avec quatre fils au même nombre de lignes numériques Arduino. Le pilote de moteur est un pilote de puissance à double pont capable de piloter deux moteurs à balais en continu avec une tension de max 35 VDC et un courant de 15 A (chacun).
En s'interfaçant avec Arduino et en n'utilisant que quatre E/S numériques (2 PWM), vous pouvez choisir le sens de rotation et la vitesse des moteurs. Le circuit comporte quatre broches de commande, quatre LED qui indiquent le sens de rotation des moteurs, deux broches pour l'alimentation de la carte (5 Vdc) et deux dissipateurs thermiques en aluminium situés à l'arrière du circuit imprimé, nécessaires pour dissiper la chaleur générée pendant le fonctionnement à pleine puissance.
Pour la gestion du driver par Arduino, le constructeur met à disposition une librairie spéciale. Les borniers de sortie permettent de connecter les deux moteurs, à raccorder comme indiqué sur le schéma (ne pas inverser la polarité, sinon les pistes s'inverseront !) à l'aide de câbles d'une section d'au moins 1,5 mm². Concernant les entrées de contrôle, il convient de respecter la connexion entre Arduino et le connecteur du contrôleur au pas de 2,54 ; correspondance nécessaire lors de l'utilisation de la librairie fournie par le constructeur et de notre firmware :si vous les éditez, vous devez réviser les connexions.
N'oubliez pas que DIR sont les niveaux logiques pour définir le sens de rotation des moteurs et PWM sont les signaux PWM pour commander les pilotes d'alimentation. Pour identifier les contacts du connecteur du contrôleur, il suffit de se référer à la sérigraphie visible à côté de celui-ci sur le côté composants du circuit imprimé. En plus du contrôleur moteur, le 24 volts alimentera la section du projecteur LED, que vous puissiez monter ou non; si monté, respectez le câblage indiqué et pensez à prendre le 24 V positif de la carte relais (cod. RELAY1CH). Ce dernier abrite un relais et le transistor de commande respectif contrôlé par Arduino via l'E/S numérique 13 ; Arduino alimente également la carte, au moyen du +5V et de la masse (GND).
Un relais permet d'allumer et d'éteindre le projecteur, en ciblant l'action sur le circuit correspondant. Le projecteur est prévu pour fonctionner à 220 Vac, cependant, comme cette tension n'est pas disponible sur le robot, pour éviter d'utiliser un onduleur nous avons modifié le projecteur en l'ouvrant, en supprimant l'AC/DC et en amenant les deux fils de la LED d'alimentation directement à la sortie du convertisseur DC / DC (cod. STEPUP30V); ce dernier est un convertisseur à découpage à tension de sortie réglable, qui doit être réglé de manière à fournir à la LED un courant tel qu'il la fasse fonctionner à environ 10 watts. Habituellement, cela est réalisé à environ 30 volts. Cependant rappelez-vous que la puissance est donnée par le produit VxI, (le courant par tension, en watts est obtenu si V est en volts et I en ampères), puis à 30 V, la consommation de courant doit être légèrement inférieure à 340 mA. Bien que le groupe de LED soit protégé en interne contre les surintensités, le STEPUP30V a une limitation du courant de sortie à 2A donc il peut être utile de le remplacer par un DC/DC équipé d'une limitation de courant de sortie.
La réception des données de la télécommande est le travail effectué par le shield PS2SHIELD, pour lequel le constructeur met à disposition la librairie spécifique. Le shield effectue la réception et le décodage de la commande; la partie radio est laissée au RX _PS2, qui est inséré dans le connecteur correspondant. La dernière chose à noter est la photorésistance, utilisée par Arduino pour détecter l'éclairage ambiant et pour contrôler la carte RELAY1CH afin que le projecteur LED soit allumé; le composant est alimenté au diviseur de tension par une résistance de 10 kOhm (1/4 W) et est lu à partir de l'entrée analogique A0 Arduino. Les 5 volts sont pris sur Arduino 5V. Ce capteur de lumière fait une chose simple :dans de bonnes conditions d'éclairage, la résistance de la photorésistance est faible et la tension lue par l'ADC du microcontrôleur Arduino est faible et ne déclenche pas la carte relais; l'obscurité à la place, augmente beaucoup la résistance et l'ADC lit une tension proche de 5 volts, ce qui provoque l'allumage du projecteur.
INSTRUCTIONS DE CONSTRUCTION
GUIDE RAPIDE
Code
- Esquisse
EsquisseArduino
https://cdn.hackaday.io/files/869403719640960/Vittorio_Snowplow_Robot.zip
Schémas
Processus de fabrication