


Projet de bras robotique :un guide étape par étape
Êtes-vous aux prises avec des tâches qui nécessitent un haut degré de précision? Ou avez-vous affaire à des opérations cohérentes et répétitives qui nécessitent une précision et des performances élevées ? Ensuite, vous avez besoin d'un projet de bras robotique.
De plus, c'est un circuit imprimé électronique fiable qui peut effectuer un large éventail d'opérations. Ainsi, vous trouverez le bras robotique dans différentes industries comme :
- Accès machine
- Laboratoires
- Automatisation industrielle
- Fabrication
Par conséquent, ce sera une idée brillante de reprendre le projet de bras robotique. Sans doute, cela paraît compliqué au premier abord mais, avec tout le matériel en place, la tâche sera plus simple. Dans cet article, nous vous donnerons des détails sur la façon de construire un bras robotique.
Mettons-nous au travail!
Qu'est-ce qu'un bras robotique ?

Bras robotique industriel
Un bras robotique fait référence à un outil mécanique que vous pouvez automatiser grâce à un logiciel spécial. Et vous pouvez installer le logiciel spécial sur un microcontrôleur particulier. La plupart du temps, cet appareil peut faire partie d'un robot de type humain ou être un appareil indépendant.
De plus, le type de tâche qu'il effectue dépend du mouvement de l'articulation du bras. Par exemple, vous pouvez voir un bras robotique et un bras de préhension robotique avec des articulations séparées qui peuvent se déplacer dans une direction rectiligne.
Comment fabriquer un bras robotique simple ?
Nous allons te montrer comment fabriquer un bras robotique simple qui se souviendra de la séquence de mouvements et de jeu. Cela dit, examinons les composants dont vous avez besoin pour le projet :
- Breadboard
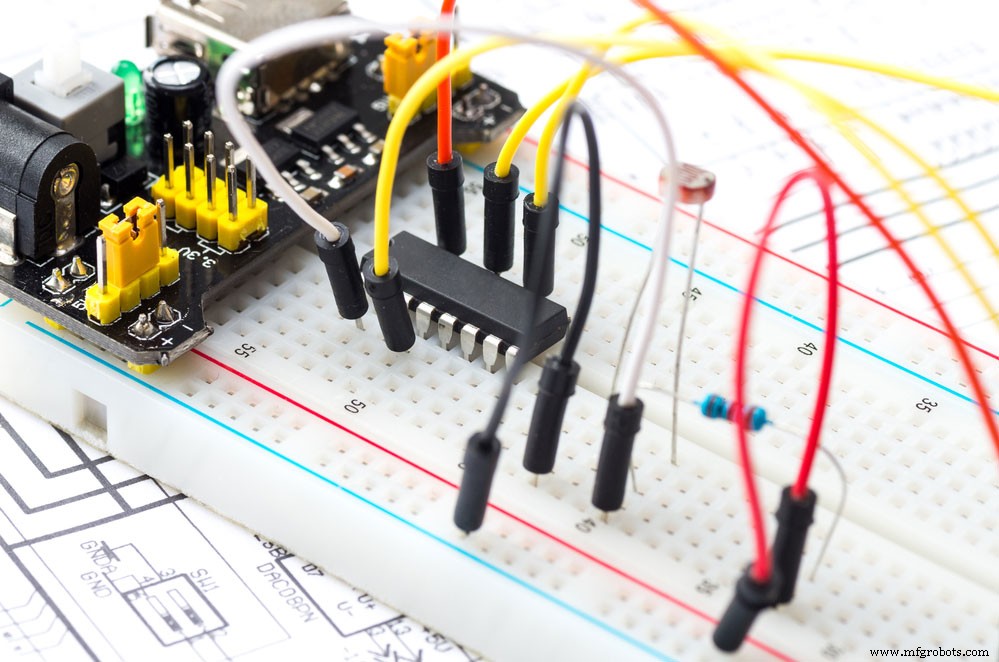
Une planche à pain
- Des morceaux de bois
- Installation de l'IDE Arduino
- Servomoteurs (5)
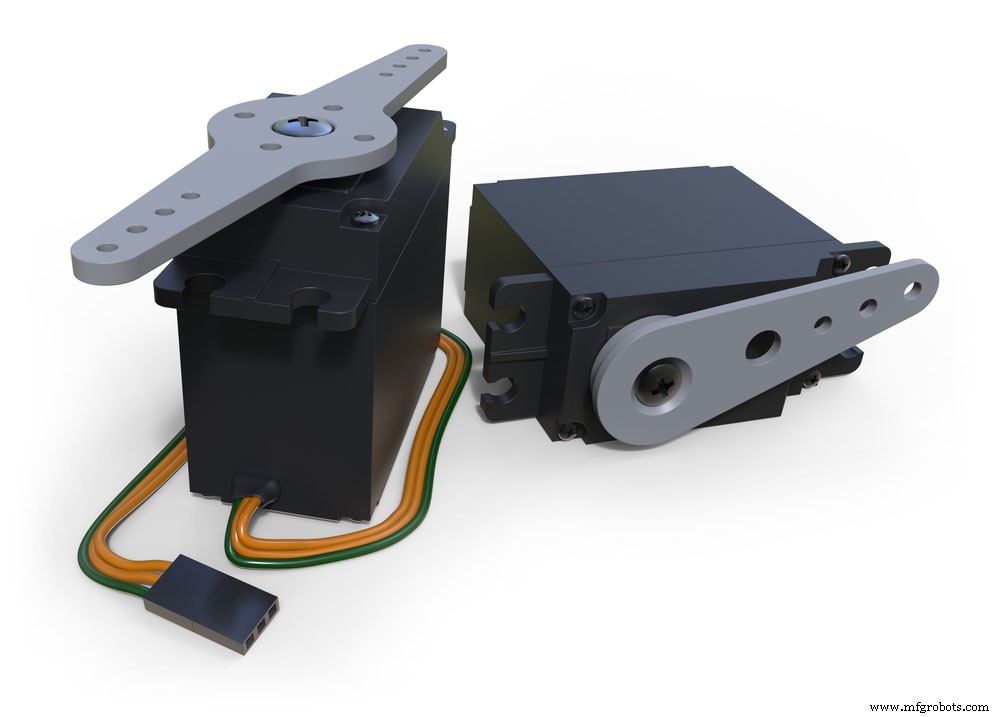
Ensemble de servomoteurs
- Arduino UNO
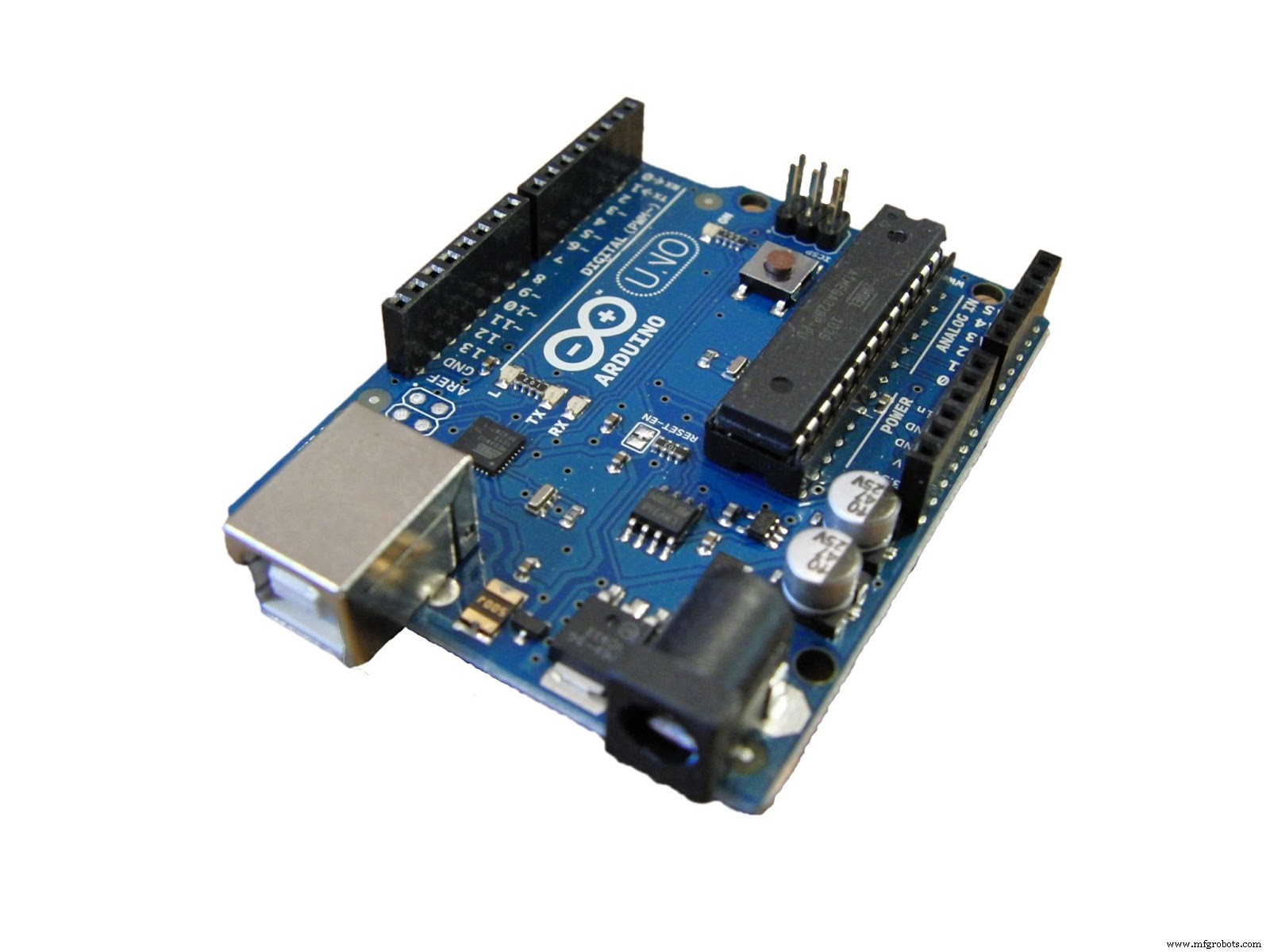
Arduino UNO
Source :Wikimedia Commons
- Potentiomètres (5)
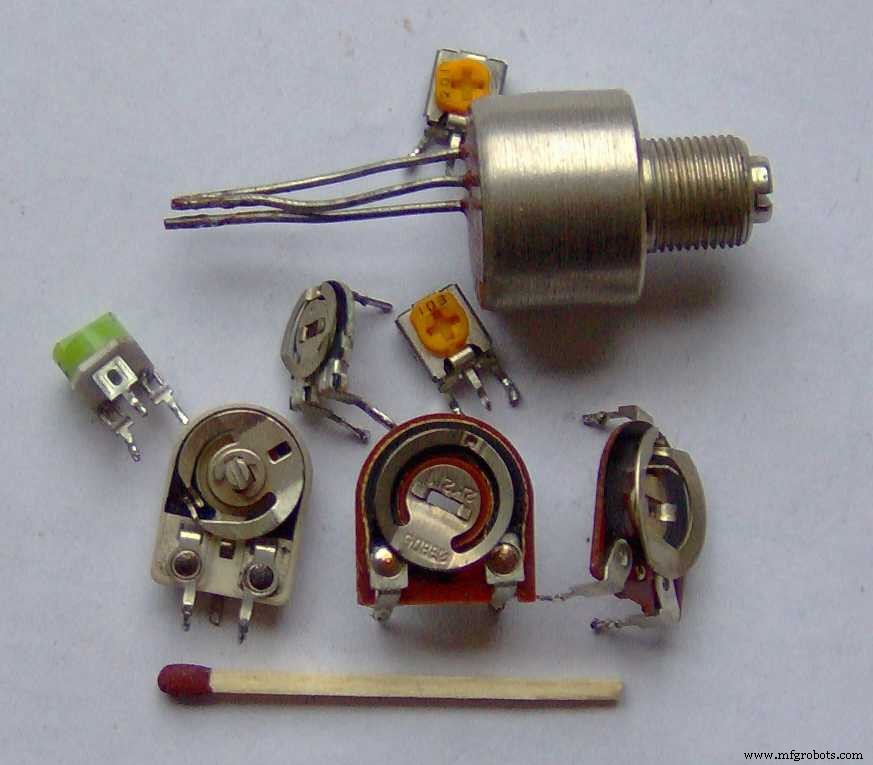
Jeu de potentiomètres
Source :Wikimedia Commons
- Adaptateur (5V 2A)
- Carton toilé (format A4)
- Fils de signalisation

Fils de signal
Dans cet esprit, vous pouvez procéder à la création de votre projet de bras robotique simple en suivant les étapes suivantes :
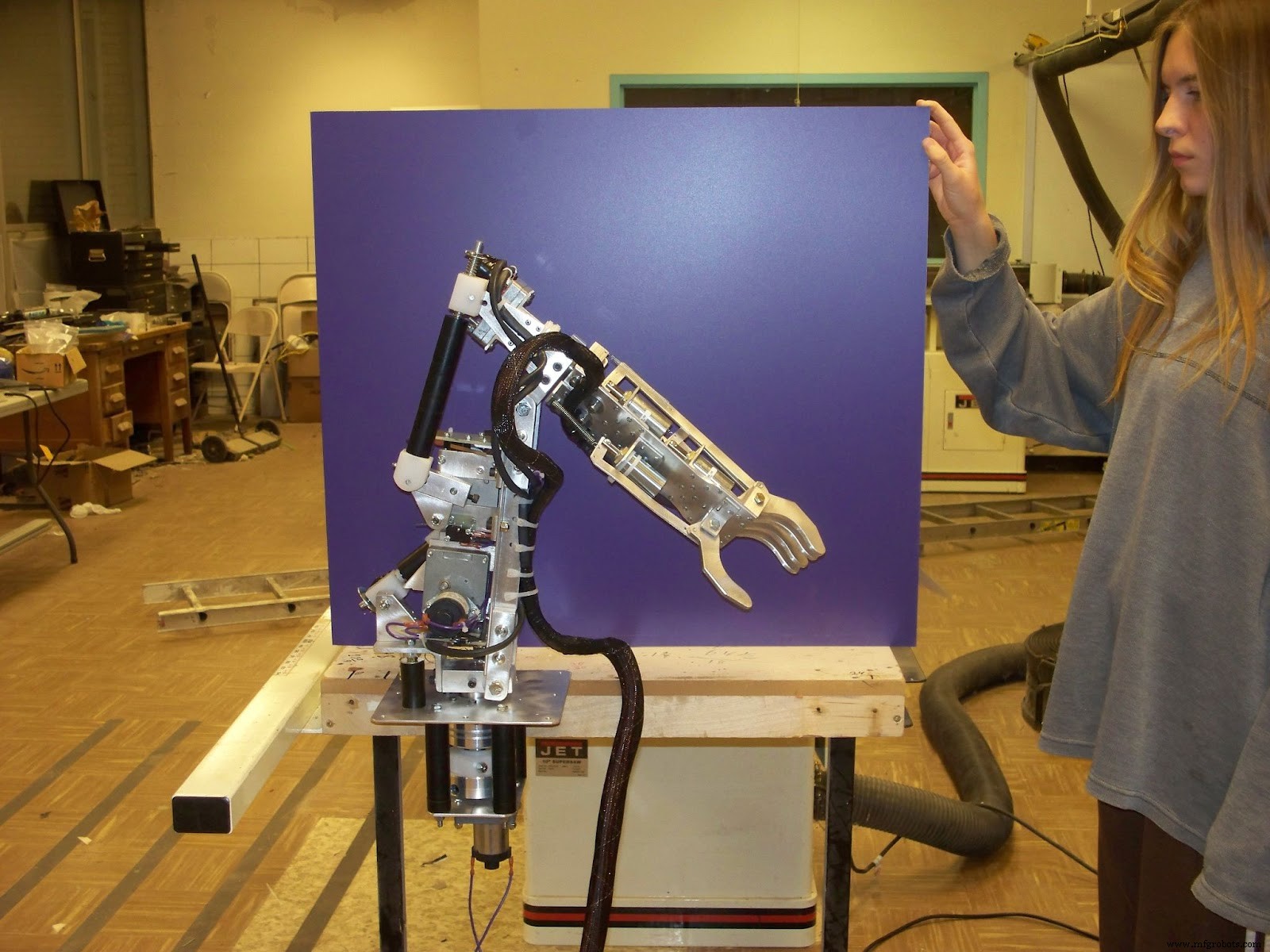
Bras robotique au travail
Étape 1 :Commencez à assembler les éléments
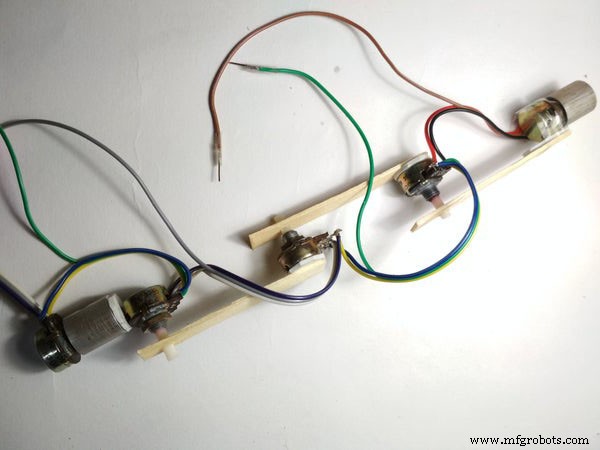
Des morceaux de bois de popsicle connectés au potentiomètre
Source :instructable
La première étape consiste à obtenir un petit morceau de bois stable pour créer le bras. Pendant que vous y êtes, optez pour la conception mécanique que vous préférez. Ensuite, collez les servos sur votre bois à l'aide d'un scotch (double face). Après cela, fixez les servos au bois avec des vis.
Quant au bras principal, vous pouvez le fabriquer en fixant vos potentiomètres sur le petit morceau de bois. Vous pouvez utiliser votre tableau en toile comme base pour monter votre installation.
Étape 2 – Connectez vos fils
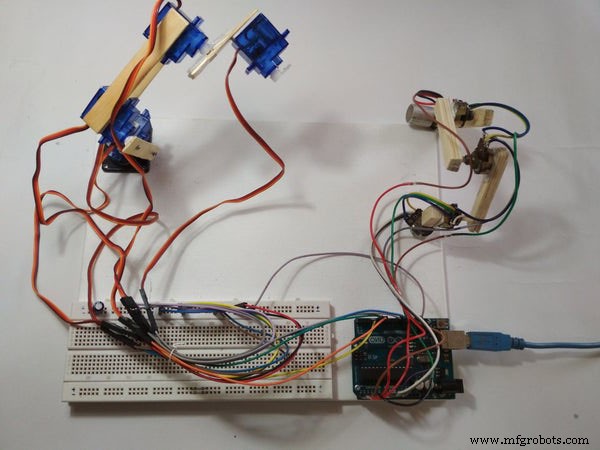
Connecter les fils et les morceaux de bois sur la planche à pain
Source :instructable
Le but ici est de s'assurer que vous connectez correctement tous vos fils. Et la première étape consiste à obtenir tous vos servos. Ensuite, effectuez une connexion parallèle des servos à la source d'alimentation. Autrement dit, votre fil noir doit aller à Gnd tandis que le fil rouge se connecte au positif.
Une fois que vous avez cela, obtenez vos fils de signal (orange ou jaune) et attachez-les à la broche PWM de l'Arduino. Avec cela, vous pouvez continuer à connecter le Gnd d'Arduino en parallèle. De plus, vous devez connecter vos potentiomètres à + 5V.
Ensuite, attachez votre terminal central à la broche Arduino Analog. Cela dit, vous pouvez réguler les servos avec des broches numériques telles que 10, 9, 6, 5 et 3. De plus, vous pouvez utiliser les broches A0 à A4 (broches analogiques) pour l'entrée des potentiomètres.
De plus, le potentiomètre qui se connecte à l'A0 aide à réguler le servo qui se connecte à la broche 3. De plus, le potentiomètre sur A1 contrôle le servo qui se connecte à la broche 5.
Sans aucun doute, l'Arduino n'alimente pas les servos. Mais, il est essentiel de s'assurer que vous connectez correctement l'Arduino et GND pour que le bras fonctionne.
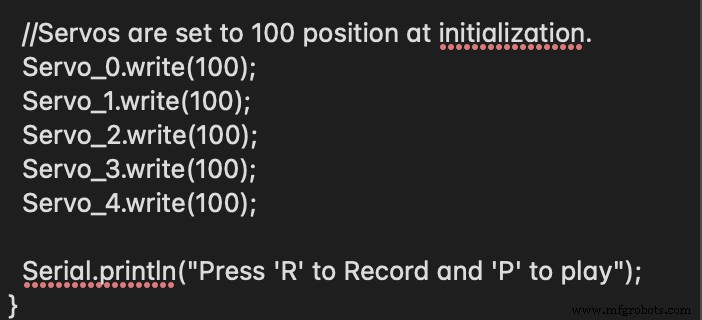
Étape 3 – Il est temps de coder
Le processus de codage pour ce projet est assez simple. Ainsi, vous pouvez commencer par stocker les potentiomètres dans un tableau. Lorsque vous obtenez les enregistrements, continuez à les traverser avec une boucle for. De cette façon, les servos géreront les pas.
En d'autres termes, vous pouvez lancer le processus en énonçant globalement toutes les variables importantes. Avec cela, il est plus facile de comprendre et d'utiliser les variables dans l'ensemble du programme.
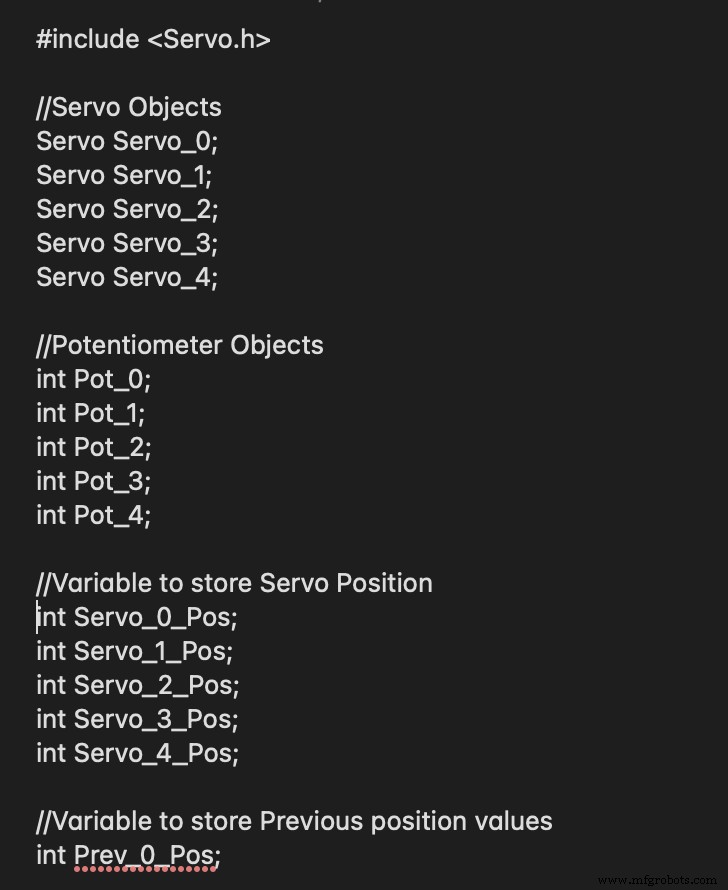
Après cela, passez à la fonction principale qui lance la première exécution. Ainsi, vous proposerez une fonction de configuration qui mettra en évidence les broches définies et leurs fonctions.
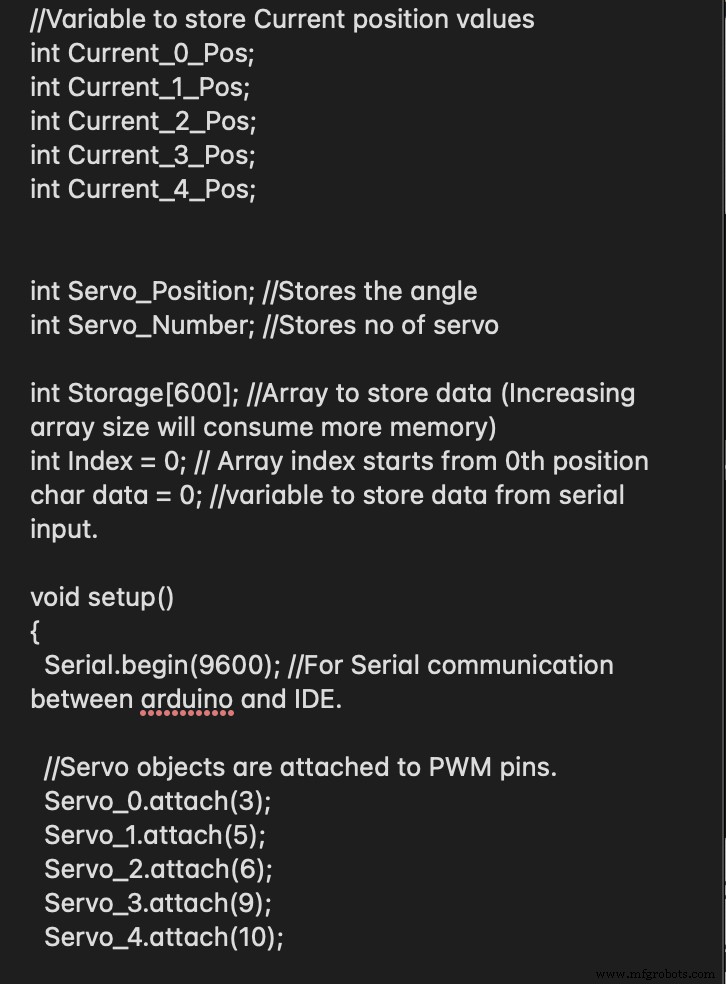
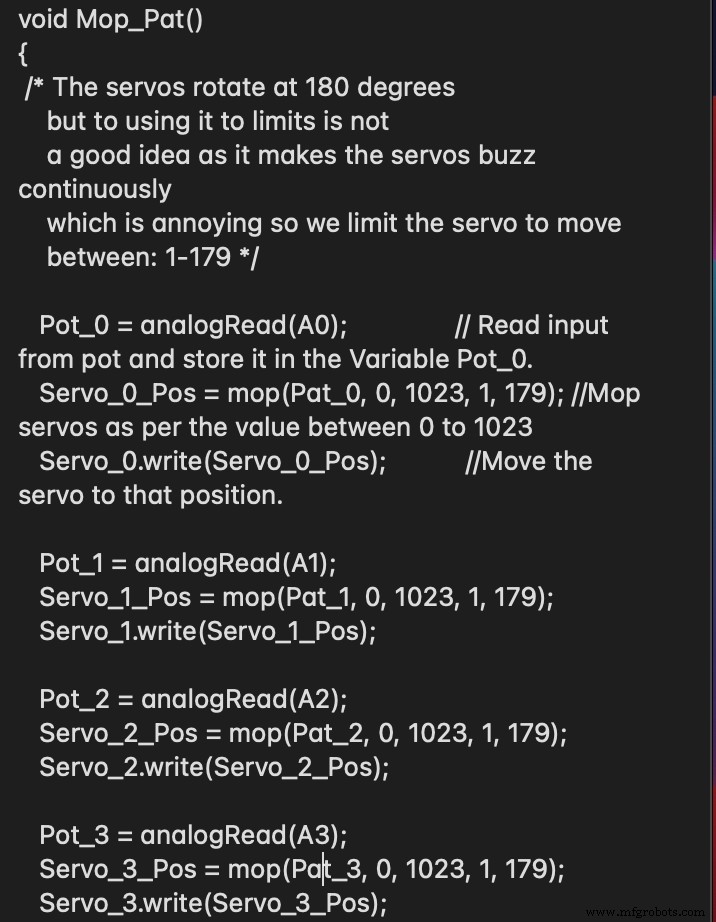
Lorsque vous avez cela, la tâche suivante consiste à utiliser les broches d'entrée analogique pour obtenir les valeurs du potentiomètre. De plus, les broches d'entrée analogique aident à cartographier les valeurs, ce qui aide à réguler les servos.
Il est maintenant temps de nommer la fonction définie par l'utilisateur. Dans le code ci-dessous, nous avons choisi Mop_Pat;.
Avec cela, vous pouvez supprimer la fonction de boucle. Lorsque vous avez terminé avec le code, vous pouvez le transférer sur la carte Arduino.
Avec cela en place, votre bras robotique fonctionnera. De plus, vous pouvez apporter quelques modifications au code si nécessaire pour un fonctionnement plus fluide.
Étape 4 – Tester
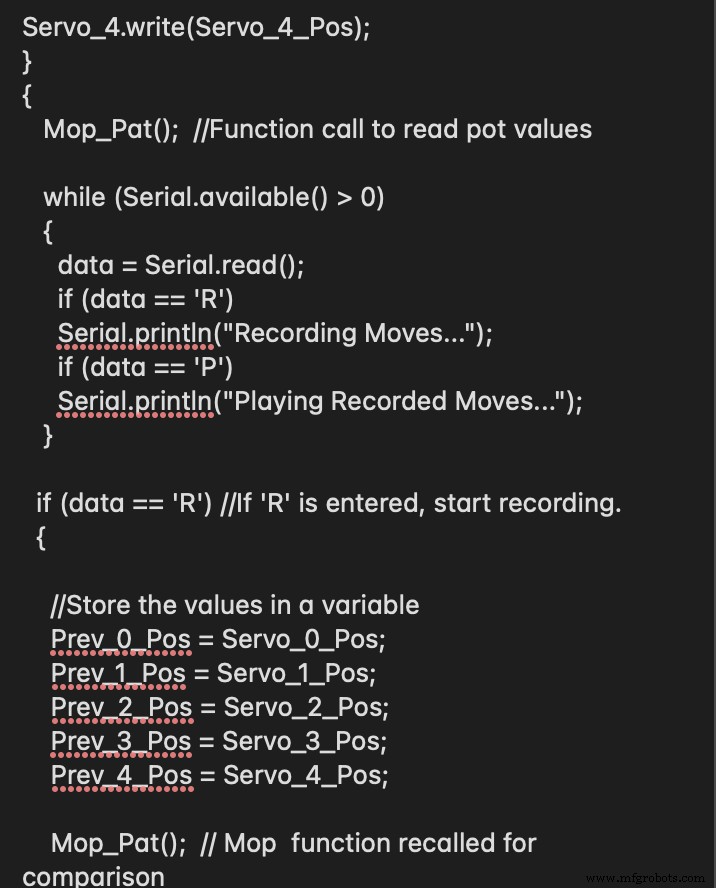
Lorsque vous avez terminé de transférer le code sur la carte, accédez à l'option Outils. Dans cette option, accédez à "Serial Monitor". Lorsque vous cliquez sur cette fonction, cela vous aidera à réinitialiser l'Arduino. Et cela vous permet d'utiliser le bras maître pour contrôler facilement le bras robotique. Cependant, à ce stade, vous ne pouvez enregistrer aucun mouvement.
Donc, vous devez taper "R" sur le moniteur pour enregistrer tous les mouvements. Lorsque vous avez enregistré tous vos mouvements, tapez "P". Cette fonction permet de rejouer tous les coups. Et le meilleur, c'est que les servos continueront d'exécuter les mouvements, tant que vous ne réinitialiserez pas la carte.
Autres idées de projets de bras robotique Arduino
Si vous pensez que le projet ci-dessus est trop basique, n'hésitez pas à essayer d'autres idées de projets de robotique de bras Arduino comme :
Le bras robotique avec contrôle gestuel (Arduino + Kinect)
Bras robotique contrôlé par geste de la main
Source :Wikimedia Commons
Ce projet consiste à diriger un bras robotique avec des gestes. Et vous pouvez capturer les gestes avec un capteur Kinect. Ainsi, les ingénieurs ont développé le bras robotique pour imiter le mouvement du coude, du bras droit, de la main et du coude. De plus, ils ont également créé cet outil avec des servomoteurs.
Un bras robotisé contrôlé par le Web

Bras robotisé contrôlé par le Web
Le bras robotisé contrôlé par le Web est une autre invention remarquable. L'outil vous montre la possibilité de coordonner le robot bras avec un serveur web. Fait intéressant, une source externe alimente cet appareil, et il utilise environ six servomoteurs.
Donc, pour y parvenir, vous devez étudier son flux de travail, prendre note du code source et comprendre l'architecture du système.
Bras robotique Arduino contrôlé par Nunchuck
Cette idée de projet se distingue par son caractère unique. Avec ce projet, vous apprendrez à utiliser un Arduino Mega pour programmer l'appareil et monter efficacement un robot à bras. Vous pouvez également utiliser le Nintendo Nunchuk pour contrôler cet outil.
Et la meilleure partie est que le Nunchuk a beaucoup de capteurs. De plus, il est facilement disponible et bon marché. Donc, si vous voulez construire ce bras robotique, il est crucial d'obtenir une liste des outils dont vous avez besoin et le code.
Bras robotique Arduino contrôlé par application Android

Bras robotisé dans la chaîne de production
Ce bras robotique est un autre projet de tâche que vous pouvez choisir. L'appareil utilise un module Bluetooth aux côtés de l'Arduino via une application Android. Cela dit, certains des outils dont vous aurez besoin pour construire ce bras robotique incluent un moteur générique doté d'un module Bluetooth (HC-05) et un Arduino mega 2560.
La main robotique contrôlée sans fil
Choisir ce projet est idéal si vous voulez savoir ce qu'il faut pour construire une main de robot. De plus, il vous apprend également à contrôler cet outil. De plus, vous aurez besoin d'outils tels que le capteur associé, les batteries, la carte Arduino et le servomoteur pour construire cette main robotique avec un gant sans fil.
Le bras robot barman Arduino

Bras Robotique Arduino Bartender
Source :WorldArchitecture
Le bras robotique Bartender est le projet sur lequel sauter si vous recherchez un projet amusant qui impressionnera les invités. Cet outil a généralement un RobotGeek Snapper Arm. De plus, il dispose d'un injecteur à valve qui renforce sa fonction de barman. Donc, ce projet fera un bon travail en déplaçant les boissons dans votre verre à partir d'un récipient.
Bras robotique Arduino contrôlé par une souris d'ordinateur
Ce projet est idéal si vous aimez un projet de bras Arduino que vous pouvez contrôler avec la souris de votre ordinateur. La meilleure partie est que ce bras robotique Arduino peut prendre sa décision en traitant des images. Comment? L'outil le fait à l'aide du logiciel de vision Matlab.
Derniers mots
Le projet de bras robotique devient rapidement une chose dans le monde. Et il est satisfaisant de voir ces appareils transporter des objets, équilibrer et empiler des objets avec précision, en fonction du type. Et ils sont utiles pour les applications médicales et l'exploration spatiale.

Bras de robot en usine
C'est donc un excellent moment pour créer la version peu coûteuse de cet outil, surtout si vous ne voulez pas gérer de tâche récurrente. Avez-vous besoin d'aide pour démarrer? N'hésitez pas à nous contacter.
Technologie industrielle
- Makerarm :un bras robotique super cool pour les makers
- Guide étape par étape du leader de la fabrication pour générer du trafic sur son site Web
- Bras robotique :comment est-il fabriqué ?
- Qu'est-ce qu'un robot manipulateur ? Un guide
- Le guide ultime des palettiseurs robotisés
- Bras hydraulique robotique dans l'industrie manufacturière :un guide définitif
- Le marché des bras robotiques devrait atteindre 14,78 milliards de dollars d'ici 2026
- Module RTC :Le guide absolu pour un projet facile
- Le bras robotique industriel - Un boom de la fabrication