


Qu'est-ce qu'un robot manipulateur ? Un guide
Les parties d'un robot jouent toutes un rôle dans ses opérations et déterminent le type de tâches pour lesquelles il peut être utilisé. Par conséquent, avoir une compréhension approfondie de ces pièces serait la première étape vers le choix du bon robot industriel pour vos besoins. Bien qu'il y ait de nombreux éléments à prendre en compte, il serait peut-être avantageux de commencer par l'un des éléments clés ; un robot manipulateur.
Un robot est une machine qui est programmée pour effectuer automatiquement des tâches spécifiques de manière prévisible. Pour ce faire, il doit manipuler des objets et soit les déplacer, soit les impacter par des actions telles que le soudage ou le perçage. C'est cette manipulation ou ces procédures effectuées sur des objets que l'on appelle manipulation robotique. Cette définition nous donne ainsi un contexte pour définir les manipulateurs robotiques.
Un manipulateur robotique est une structure en forme de bras reliée au corps d'un robot et est utilisé pour exécuter des tâches. Un robot sans manipulateur serait l'équivalent d'une personne effectuant une tâche les mains liées derrière le dos, ce n'est tout simplement pas viable. C'est d'ailleurs pour cette raison que les manipulateurs robotiques sont également appelés bras robotiques. Source :Kawasaki
Les robots manipulateurs sont constitués d'une série d'articulations et de liens fusionnés dans leur structure intérieure. De l'extérieur, le bras manipulateur robotique ne semble être monté que sur le robot. Cependant, la série d'articulations et de liaisons va plus loin dans le corps du robot pour les lier. Cela garantit que le robot et le manipulateur travaillent ensemble dans des mouvements fluides coordonnés.
Les liens sont des composants rigides qui fusionnent différentes parties d'un robot. Bien que leur rigidité offre une structure ferme, il serait difficile pour les pièces du robot de se déplacer pendant les tâches. En conséquence, des articulations sont ajoutées aux maillons pour faciliter la flexibilité. Les articulations sont des composants mobiles qui glissent les uns contre les autres pour faciliter le mouvement linéaire, rotatif ou révolutionnaire des pièces du robot. Ils sont construits et fonctionnent de la même manière qu'un coude ou un genou humain. Source :www. brainkart.com
Les types et le nombre d'articulations d'un robot manipulateur déterminent ses degrés de liberté, la forme de son enveloppe de travail et la manière dont il peut être appliqué. Cela détermine à son tour comment un robot est catégorisé. À titre d'illustration, examinons différents types de robots et les structures de leurs manipulateurs robotiques.
Robot cartésien- ses manipulateurs sont reliés par 3 joints prismatiques perpendiculaires entre eux et n'offrant que des mouvements de glissement linéaires. En conséquence, un robot cartésien est classé comme un robot à 3 axes et a une enveloppe de travail géométrique.
Robot polaire- le bras et le corps d'un robot polaire sont reliés à l'aide d'une articulation tournante. Ce type d'articulation permet des mouvements circulaires qui permettent au bras du robot polaire de se déplacer sur 3 axes dans un système de géométrie polaire.
Robot cylindrique- un bras de robot cylindrique fonctionne à l'aide d'une articulation rotative à la base et d'une articulation linéaire qui lui permet de se déplacer le long de l'axe vertical. La configuration de ces articulations permet au manipulateur de s'allonger et de se rétracter mais son enveloppe de travail est encore assez limitée à une petite forme cylindrique.
Robot SCARA – les articulations d'un robot SCARA sont rotatives et facilitent ses déplacements selon les axes XY tout en restant rigides dans l'axe Z. Les articulations étant un plan horizontal, les robots SCARA ont de larges enveloppes de travail de forme semi-circulaire.
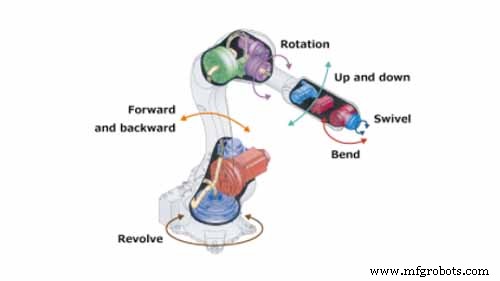
Robot articulé – un robot articulé a les manipulateurs les plus flexibles parmi tous les autres robots. Le bras du robot manipulateur est lié au corps du robot par une articulation rotative tandis que le coude et d'autres parties du bras sont liés à l'aide d'articulations tournantes. Les articulations tournantes permettent au bras de rouler, de tanguer et de lacet, ce qui en fait un robot à 6 axes.
La flexibilité de divers manipulateurs robotiques peut être exploitée pour automatiser les processus dans différentes industries. Des exemples de telles applications incluent :
Chirurgie robotique- dans cette application, un manipulateur robotique articulé est équipé d'instruments chirurgicaux comme effecteurs terminaux. Il est contrôlé à distance par un chirurgien pour exécuter des manœuvres chirurgicales.
Choisir et placer – il s'agit d'une application industrielle courante où les robots manipulateurs sont utilisés pour des tâches répétitives de prélèvement et de placement telles que l'emballage de marchandises.
Assemblage PCB – dans ce cas, un robot manipulateur remplace les mains d'un travailleur humain pour assembler des micropièces sur une carte PCB avec une précision et une vitesse élevées.
Il est sûr de dire que le sens du robot manipulateur en robotique va plus loin que la simple fonction. Il va plus loin pour définir la structure et comment un robot peut être appliqué. Manipulateurs de qualité d'un fabricant de bras robotique réputé serait donc un investissement rentable pour quiconque s'aventure dans la robotique.
Table des matières
Qu'est-ce que la manipulation robotique ?

En quoi consistent les robots manipulateurs ?
Les manipulateurs de robots dans différents robots

Applications des manipulateurs robotiques
Conclusion
Robot industriel
- Quelles industries et entreprises utilisent des robots
- Robots industriels - Le guide ultime
- Qu'est-ce que l'automatisation des processus robotiques et ses avantages
- Le guide ultime sur le soudage robotisé dans la fabrication
- Bras robotique :comment est-il fabriqué ?
- Robotique dans la fabrication automobile
- La communication M2M ou Machine to Machine, qu'est-ce que c'est ?
- La thermographie, qu'est-ce que c'est et à quoi ça sert
- Industrie 4.0, qu'est-ce que cela implique ?