


Qu'est-ce qu'un poignet de robot :un guide définitif
Dans l'industrie manufacturière, vous trouverez souvent des robots automatisant différents processus. Ces robots sont utiles pour rationaliser les processus d'une entreprise et également réduire les risques de blessures. La plupart des produits robotiques présents dans ces entreprises sont des bras robotiques utilisés pour le pick &place, l'assemblage et l'emballage, entre autres. En ce qui concerne ces bras robotiques, vous devez garder à l'esprit quelques aspects. L'un d'eux est le poignet de robot qui est présenté dans un bras robotique. La plupart des gens ne savent pas grand-chose sur cette partie très cruciale du bras du robot. Dans ce bref article, nous expliquerons plus en détail ce que c'est et ce que cela implique. Source :www. k-and-s.com
Lorsque vous travaillez avec un bras robotique, vous avez deux composants importants qui sont généralement en jeu. Cela inclut le corps et le bras lui-même. Sur le bras, vous trouvez le poignet du robot qui comporte différentes articulations qui lui permettent de se déplacer dans différentes directions. Ce mouvement permet au poignet du robot de contrôler l'effecteur terminal qui est attaché à l'extrémité. Il aide à effectuer différentes tâches que le bras robotique doit effectuer. C’est tout un système de différentes parties jouant leur rôle pour atteindre un objectif commun. Le poignet du robot présenté sur le bras robotique est livré avec au moins 2 à 3 articulations compactes qui lui permettent de fonctionner de manière transparente dans différentes applications. Source :www. brainkart.com
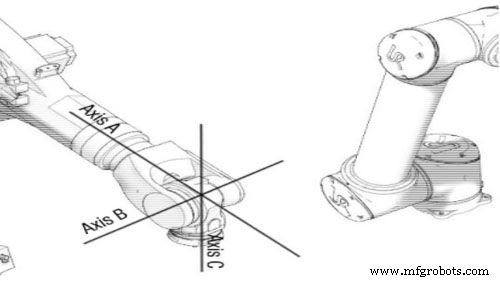
Le mécanisme du poignet du robot est une grande partie du manipulateur et fonctionne pour orienter l'effecteur final pour différentes applications. Ce mécanisme se compose d'un bras qui tourne autour d'un axe et comporte des articulations qui lui permettent d'effectuer différents mouvements dans différentes directions. Le mécanisme de poignet du robot pendant son utilisation est soumis à différents types d'environnements de travail. Vous constaterez qu'il sera exposé à différentes vibrations lors de son utilisation. Ces vibrations peuvent affecter négativement le poignet du robot et son fonctionnement.
La meilleure façon de s'assurer que le poignet de votre robot fonctionne au mieux est d'étudier attentivement ses performances. Soumettez-le à différents poids sur les charges portées par l'effecteur final pour voir comment il fonctionne. Cela vous aidera à évaluer sa charge utile et vous permettra de l'utiliser aux bons endroits pour éviter de l'endommager. De plus, vous devez également vous assurer que le manipulateur et le poignet du robot sont correctement configurés. Certaines des configurations de poignet à garder à l'esprit incluent.
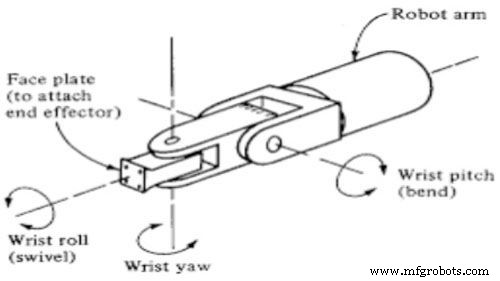
Cette configuration est également appelée pivot de poignet. Il comporte la rotation du mécanisme du poignet autour de l'axe du bras.
Le pas dans la configuration du mécanisme de poignet est également appelé courbure du poignet. Il dispose d'une rotation de haut en bas du poignet.
Avec le Yaw, le mouvement et la rotation du poignet sont dédiés à droite et à gauche.
La notation TRL comporte un bras coulissant qui peut pivoter à la fois sur l'axe vertical et l'axe horizontal.
Avec cela, le poignet du robot fonctionne par rapport à une colonne verticale. Cela permet au poignet de se déplacer vers le haut et vers le bas ou vers l'intérieur et l'extérieur en fonction des tâches à accomplir.
La notation LOO se compose de trois articulations coulissantes qui permettent au poignet de se déplacer dans différentes directions. Deux des trois joints coulissants sont orthogonaux. On les retrouve principalement sur les robots rectilignes et les robots X, Y, Z. Source :www. researchgate.net
Il est important de s'assurer que le bras robotique que vous utilisez est de grande qualité et qu'il est conçu avec précision. L'un des facteurs les plus importants à considérer ici est la configuration du poignet avec laquelle vous allez travailler. Vous devez vous assurer que le poignet est configuré en fonction de vos besoins spécifiques. N'oubliez pas que l'effecteur final ne se déplacera que dans la direction que prend le poignet. Cela montre que le fait d'avoir les bonnes configurations garantira que l'effecteur final peut choisir et placer avec précision.
De plus, la configuration du poignet droit aidera à réduire les risques de blessure et d'endommagement du bras robotique. Déterminez dans quelle direction le poignet doit se déplacer pour une tâche spécifique et faites-le modifier pour répondre à vos besoins. Le poignet du robot est une partie essentielle du bras robotique, alors assurez-vous de vérifier vos besoins de configuration pour un processus d'automatisation plus fluide et plus transparent.
Le poignet du robot est un aspect important lorsqu'il s'agit d'utiliser des bras robotiques et des manipulateurs pour différentes tâches d'automatisation. Il présente différentes configurations qui doivent être prises en compte avant de mettre le poignet du robot au travail. Cela permet de garantir que vous travaillez avec les meilleures configurations conçues pour déplacer l'effecteur final dans la bonne direction. Lorsque vous achetez vos bras robotiques, pensez à demander à votre fabricant de bras robotiques de les configurer à votre guise. Cela vous permettra de commencer à l'utiliser facilement dans vos processus commerciaux. 
Table des matières
Qu'est-ce qu'un poignet de robot

Le mécanisme de poignet de robot
Rouler
Pitch
Lacet
Notation TRL
Notation TLO
LOO de notation
Importance de la configuration du poignet des bras robotiques
Conclusion
Robot industriel
- Ce qu'un robot autonome peut et ne peut pas faire
- Quelle est la réalité de la vision robotique ?
- Les goulots d'étranglement dans la fabrication – Un guide définitif
- Que sont les cobots ?
- Qu'est-ce que le Kevlar ? Un petit guide
- Qu'est-ce qu'un cobot ? Un guide des robots collaboratifs
- Guide du débutant sur l'automatisation
- Qu'est-ce qu'un Robot Café Barista ?
- Qu'est-ce qu'un robot de boissons ?