


Comment la technologie a-t-elle changé la fabrication de robots
Introduction :Attention, cela pourrait vous faire vous sentir VIEUX
Je m'appelle Steve Spano, mon premier projet électronique consistait à connecter une batterie, deux fils et une ampoule de lampe de poche quand j'avais 4 ans. De 6 à 16 ans environ, j'ai appris par moi-même divers langages de programmation (assembleur, basique et même C) sur des ordinateurs tels que Texas Instruments TI-994A, Commodore C64, Amiga 2000 et IBM 386. J'ai également construit plusieurs Heathkit des projets électroniques tels que le kit récepteur radio « Solid State ». Combien d'entre vous ont déjà entendu parler de Heathkit ?

Je voulais vraiment le robot Heathkit HERO 1, il était incroyablement sophistiqué avec sa détection d'objet à ultrasons, son bras mobile et son unité centrale de traitement 8 bits. Il est même venu avec un clavier à distance radio pour que vous puissiez le programmer directement en assemblage hexadécimal ! Pouvez-vous imaginer? Programmation directement en hexadécimal avec un clavier et pas de débogueur du tout ? L'horreur! Étonnamment, ce petit robot se vend toujours 1500 $ US sur Ebay. Je devrais en acheter un - j'en ai toujours voulu un - et c'est tellement mignon !

Pendant de nombreuses années, avant Internet, si vous pouviez imaginer une telle époque, j'ai même géré un service "BBS" sur un modem à 9600 bauds appelé "Inter-Dimension" où nous échangeions des messages et des logiciels Commodore/Amiga. Mon rêve informatique à l'époque était d'économiser 2 000 dollars (une somme d'argent incroyablement énorme en 1995 pour un jeune de 16 ans) pour acheter un disque dur de 10 mégaoctets pour mon Amiga 2000. Si j'avais pu avoir ce disque dur, J'aurais eu le meilleur BBS basé sur un modem !
J'ai grandi à Scranton, Pennsylvanie (États-Unis) et je suis allé à l'école d'ingénierie électrique (Université de Scranton) et j'ai obtenu une maîtrise en EE avec une concentration en systèmes de contrôle de l'Université d'État de New York. Mon premier travail EE après l'école a été de concevoir du matériel pour les imprimantes thermiques utilisées dans les caisses enregistreuses et les applications de vente au détail. Le projet principal de mon premier emploi EE, en 1998, était d'aider à mettre à jour les produits de l'entreprise de leur processeur Intel 8 bits vers un tout nouveau processeur 32 bits 50 MHz avec un bus mémoire 16 bits. Il s'agissait d'un grand projet impliquant des équipes d'ingénierie logicielle, matérielle et mécanique. Mon deuxième emploi EE travaillait pour une entreprise qui concevait des systèmes de réseau de stockage. C'était en 2001 et le grand projet de cette société était d'aider à concevoir une série de systèmes SAN prenant en charge la toute nouvelle interface Fibre Channel 2 Gbit/s. C'était vraiment rapide, 2Gbit/s sur la fibre optique en 2001 ! Comment la technologie pourrait-elle être meilleure que cela ?
Projet Senior 1997
J'ai découvert la page ElectronicsLovers sur Instagram et les administrateurs recherchaient des papiers "Senior Project" à mettre en avant sur leur page. Aucune date n'a été précisée, alors j'ai pensé que je soumettrais mon mémoire de fin d'études universitaires de 1997, principalement comme un rappel amusant de l'évolution de la technologie.
Lorsque je terminais mon diplôme BSEE en 1997 à l'université de Scranton, notre projet de dernière année consistait à concevoir un robot autonome capable de naviguer dans un labyrinthe. J'ai tout de suite pensé au Heathkit HERO1; maintenant je pourrais essayer d'en construire un à l'école et un robot beaucoup plus avancé. Après tout, le Heathkit HERO1 était basé sur un processeur Motorola 6808 8 bits avec 4 Ko de RAM (encadré :les cartes réseau PCI-Express 1G typiques d'aujourd'hui ont une mémoire tampon de 64 Ko à 256 Ko uniquement pour les données par paquets).
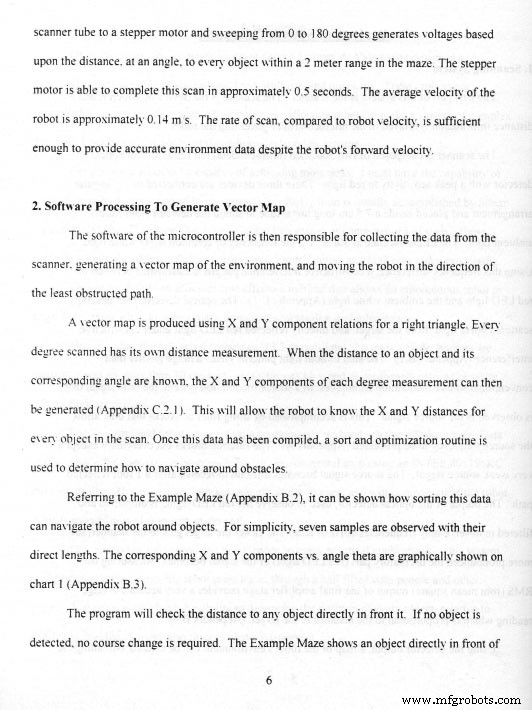
L'architecture de conception de mon robot a utilisé un Intel 87x196KC beaucoup plus avancé. Il s'agissait d'un processeur 16 bits qui fournissait 32 Ko de mémoire EEPROM interne pour le stockage du programme, mais il ne fournissait qu'une mémoire RAM totale de 512 octets. Le compilateur "C" générait un code très peu optimisé, ce qui rendait la gestion de la pile sur 512 octets un défi important, et il n'y avait pas de débogueur JTAG en temps réel ni aucun autre type de débogueur. Cependant, le processeur disposait d'un port série/UART interne que vous pouviez utiliser pour écrire des sorties de caractères simples afin de déterminer ce que faisait le code. Les appels de fonction "C" standard à printf/sprintf n'étaient même pas pris en charge sur le processeur car la mémoire RAM était trop petite.
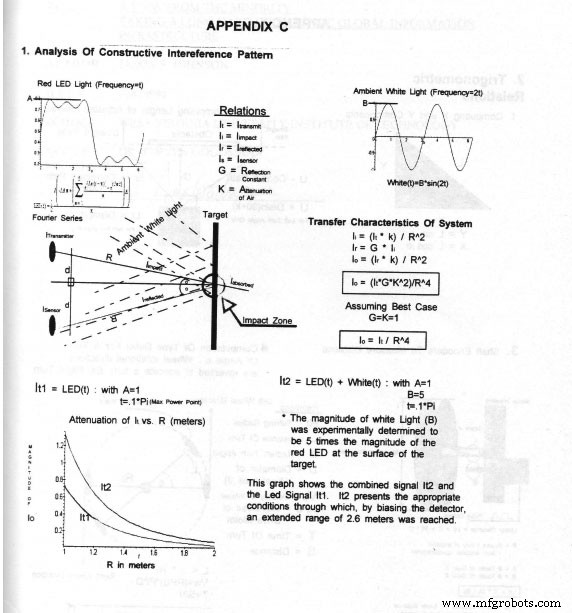
Lors du développement du robot, divers circuits tels que des pilotes FET de commande de moteur ont été utilisés pour permettre le contrôle du processeur sur une série de moteurs 12 VDC afin que le robot puisse se déplacer dans une pièce. Un système "Lidar" brut a été construit à l'aide d'une LED laser, d'un miroir et d'un détecteur. Cela a permis d'imager une simple vue "1 bit" de la pièce devant le robot. J'utilise également le terme "imagé" de manière très vague. Une carte simple de "marche/arrêt" pour les obstacles a été créée dans environ 32 octets de mémoire. Le code CPU essaierait alors de déterminer si le robot se déplaçait vers un espace ou un mur dans le labyrinthe qu'il essayait de traverser. Pendant la compétition, le robot a réussi à naviguer dans le labyrinthe. J'ai même écrit un article sur la conception du robot et il a remporté la 2e place au concours IEEE Student Paper Competition en 1997 à l'Université George Washington. Le robot a fonctionné et ils m'ont permis d'obtenir un diplôme en génie électrique.
Projets de terminale 2018
J'étais récemment à l'Université de Scranton en tant que conseiller industriel pour aider à proposer des idées de cours en fonction des besoins de l'industrie et des compétences/technologies pertinentes pour les défis d'ingénierie d'aujourd'hui. J'ai interrogé l'un de mes professeurs sur les projets de robots et sur ce que les étudiants font actuellement.
L'université de Scranton organise toujours chaque année un concours de robots pour ses étudiants en ingénierie, mais il s'agit désormais d'un concours régional et national. Les robots que les étudiants conçoivent sont des centaines de fois plus complexes. Les robots actuels utilisent des processeurs Arm9/Arm11 tels que le Raspberry PI. Les étudiants écrivent du code « C » qui s'exécute sous Linux pour s'interfacer directement avec les caméras USB-HD, permettant une véritable imagination sur les robots. En combinant Linux, Raspberry PI et la richesse des projets Open Source disponibles via GIT et Google, les étudiants ont alors accès à des algorithmes de détection et de reconnaissance d'images. Au cours du développement des projets de robots d'aujourd'hui, les étudiants peuvent télécharger des algorithmes open source, les déboguer avec des moniteurs Ethernet distants leur permettant de voir chaque variable et leur code en une seule étape pour le débogage. Les élèves passent alors plus de temps à développer des algorithmes de navigation très intelligents pour essayer de donner un meilleur avantage à leur robot pendant la compétition.
Après avoir entendu cela, j'ai immédiatement répondu "Comme c'est injuste!". À mon époque, nous devions stocker une image entière sur 32 octets et coder manuellement un gestionnaire de pile pour permettre à notre code de s'exécuter même sur les 512 octets de RAM qui nous étaient fournis. Bien sûr, le Raspberry PI n'est même pas le « sommet » de la technologie actuelle, mais il est à des années-lumière de tout ce qui était disponible en 1997. Non seulement le matériel est plus sophistiqué, mais les environnements de débogage et de développement permettent aux étudiants de se concentrer sur la conception. plutôt que de lutter avec des problèmes de mémoire. Cependant, certaines choses restent les mêmes. Le robot doit encore se déplacer. Bien que les étudiants aient accès à certains processeurs haut de gamme, ils doivent toujours disposer d'un port 3,3 v sur un processus pour allumer/éteindre un moteur 12 VDC. Cela ramène les étudiants à la conception de circuits pour les transistors et les FET, ils apprennent comment ces composants de base fonctionnent et permettent à leurs robots de se déplacer.
J'ai souri et j'ai dit que les bases s'appliquaient toujours, et les étudiants le reconnaissaient. L'électronique sophistiquée repose toujours sur le fonctionnement fondamental de transistors uniques; peut-être qu'un à l'extérieur d'un processeur allume un moteur, ou 5 billions d'entre eux à l'intérieur d'un processeur pour traiter une image et un code de navigation.
http://news.scranton.edu/articles/2017/ 03/FIRST-Robot-Comp-2017.shtml
Mon 3e "travail" - que j'exerce encore aujourd'hui - est de diriger ma propre entreprise de conseil en électronique et logiciels. J'ai démarré une entreprise de conseil en 2001 et cela a certainement été plein de travail et d'activités inattendues. J'ai directement employé plus d'une douzaine de personnes et nous avons travaillé sur des projets matériels et logiciels allant de la conception de l'alimentation électrique, du pilote d'imprimante, du traitement d'image, des appareils réseau, des disques durs et de la cryptographie. Personnellement, je prévois de me concentrer davantage sur mon préféré. élément technologique – FPGA Xilinx.
Les dispositifs FPGA modernes tels que la série Kintex/Atrix rassemblent les meilleures parties du développement matériel et logiciel ; matériel reconfigurable, logiciel reconfigurable et débogage simultané. Un projet particulier sur lequel j'ai travaillé est celui d'un spectromètre de masse. Dans cette conception particulière, il y avait de nombreuses contraintes de vitesse et de collecte de données. Une partie du correctif consistait à "ajouter simplement un autre cœur de processeur". Presque comme par magie, un appareil à un seul cœur à cause d'un appareil à deux cœurs permettant le partitionnement des tâches d'entretien ménager et des fonctions critiques. La possibilité de reconfigurer un appareil physique, tel qu'un FPGA, avec des cœurs de processeur supplémentaires aurait été difficile à concevoir en 1997. Les appareils FPGA modernes vous permettent de le faire tout le temps maintenant.
Je prévois de retourner à l'Université de Scranton plus tard cette année pour parler à certains des étudiants des projets FPGA en cours. Je vais me concentrer davantage sur eux dans mon travail; peut-être qu'à l'avenir, je pourrai encadrer de nouveaux ingénieurs alors qu'ils commencent le premier emploi de leur nouvelle carrière. PS Un "score" est de 20 ans. J'ai dû regarder ça de nouveau. Je suis un ingénieur, pas une majeure en anglais.
Annexe A – Extraits de My Robot Paper ou
"How Times Have Changed"
Cet article a été écrit par M. Spano, il fait partie de notre équipe veuillez Cliquez ici si vous souhaitez lire sa biographie.
Technologie industrielle
- Comment sécuriser la technologie cloud ?
- Comment créer une plate-forme robotique Arduino+Raspberry Pi
- Comment la technologie moderne a-t-elle transformé les méthodes de sculpture des œufs de Pâques ?
- Robot « artistique » à NPE
- 9 lois de la technologie qui ont changé le monde
- Comment les machines CNC ont changé la fabrication
- Comment les prestataires logistiques devraient investir dans la technologie
- Comment un routeur CNC a changé nos vies ?
- Michel Loggins