


Les 11 bases de programmation de robot les plus utiles
Quelles sont les propriétés de base les plus utiles à connaître lorsque vous débutez dans la programmation de robots ?
Que vous soyez nouveau dans le monde de la robotique ou que vous cherchiez simplement à améliorer vos compétences en programmation, voici les principales bases de la programmation robotique qu'il est bon de connaître.
Il peut parfois sembler que vous ayez besoin d'un diplôme en robotique pour vous lancer dans la programmation de robots. Les approches conventionnelles de la programmation de robots industriels semblent difficiles à saisir pour les nouveaux programmeurs en robotique.
Cependant, avec une bonne connaissance des bases de la robotique et un bon logiciel de programmation de robots, vous pouvez démarrer facilement et rapidement.
Voici les 11 bases de programmation de robots les plus utiles :
1. Composants de base d'un robot
Avant de commencer à apprendre à programmer un robot, il est utile de comprendre les éléments de base de tout robot industriel. De cette façon, vous êtes au moins à l'aise avec la machine physique que vous allez programmer.
Par exemple, les pièces les plus élémentaires d'un robot industriel à 6 degrés de liberté sont :
- Bras du manipulateur
- Effecteur terminal
- Contrôleur
- Source d'alimentation
- Capteurs (le cas échéant)
Les composants varient légèrement selon le type de robot.
2. Degrés de liberté
J'ai déjà introduit un concept vital en robotique :les degrés de liberté (DoF).
Le DoF d'un robot spécifie le nombre d'axes indépendants avec lesquels le robot peut se déplacer. Par exemple, un bras manipulateur à 6 degrés de liberté aura 6 axes contrôlables indépendamment. Certains DoF sont "révolutionnaires" (c'est-à-dire qu'ils tournent autour d'un point) et certains sont "linéaires" (c'est-à-dire qu'ils se déplacent le long d'une ligne). Il est utile de se familiariser avec le DoF de n'importe quel robot avant de le programmer.
3. Articulations et effecteurs terminaux
La "fin métier" d'un robot (c'est-à-dire la partie qui exécute la tâche) est appelée "effecteur final". Lorsque vous programmez, vous souhaitez généralement diriger l'effecteur final du robot vers des emplacements particuliers.
Pour déplacer le robot, vous devez envoyer des instructions avec les positions souhaitées de chacun des DoF du robot. Si vous utilisez un logiciel comme RoboDK, vous pouvez simplement programmer directement la position de l'effecteur final souhaitée au lieu d'envoyer des positions articulaires spécifiques.
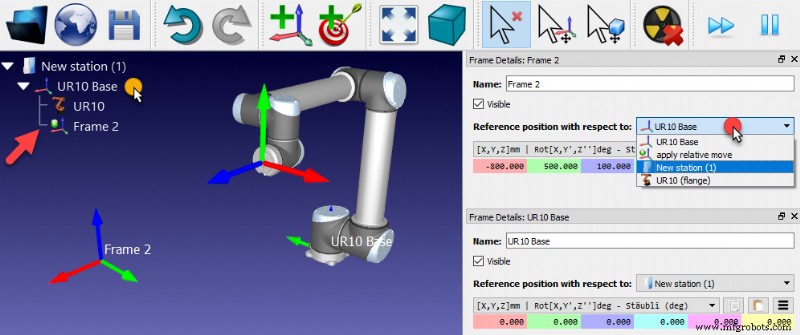
4. Pose :position et orientation
Comment programmer l'effecteur final pour lui dire où aller ?
La position et l'orientation de l'effecteur terminal du robot (ou de tout autre emplacement que vous programmez) sont combinées pour former la "pose". Vous devez spécifier la pose de tout emplacement vers lequel le robot se déplacera dans votre programme. La méthode la plus courante de spécification d'une pose en programmation consiste à utiliser les angles d'Euler.
Pour plus d'informations, consultez notre article Robot Euler Angles :l'essentiel.
5. Point central de l'outil (TCP)
Comme nous sommes plus intéressés par la pose de l'effecteur final lorsque nous programmons un robot, nous utilisons souvent le terme point central de l'outil pour désigner le centre opérationnel de l'outil.
Voici quelques exemples pour différents effecteurs finaux :
- Pistolet à colle— Vous pouvez définir le TCP pour qu'il soit à la pointe du pistolet.
- Préhenseur — Le TCP peut se trouver au centre des doigts du préhenseur.
- Pistolet de soudage — Le TCP peut se trouver à quelques millimètres de la pointe du pistolet, là où la flamme est la plus chaude.
En tant que programmeur, vous choisissez où il est le plus logique de placer le TCP du robot.
6. Cinématique
L'un des aspects les plus difficiles de la robotique est la cinématique. Cela signifie simplement la disposition géométrique du robot. La cinématique est représentée comme une équation ou un algorithme assez grand.
L'équation cinématique directe répond à la question "Si je règle les articulations du robot sur une position particulière, où finira le TCP ?"
L'algorithme Inverse Kinematic répond à la question opposée "Si je veux que le TCP se retrouve dans cette pose, dans quelle position dois-je régler les articulations ?"
Avec un bon logiciel de programmation de robot, vous n'avez probablement pas besoin de formuler votre propre cinématique, mais il peut être utile de comprendre le concept de base.
7. Limites conjointes
Les équations cinématiques décrivent le robot en utilisant la géométrie pure et les mathématiques. Cependant, les robots sont des machines physiques. Le robot physique ne peut souvent pas atteindre toutes les positions que la géométrie indique qu'il peut atteindre.
Nous introduisons des limites articulaires dans la programmation pour limiter le mouvement des articulations du robot uniquement aux positions physiquement possibles. Ils disent simplement au programme "Cette articulation ne peut pas se déplacer au-delà de cet angle."
8. Types de déplacement
Lorsque vous programmez le robot, il existe différents types de mouvements que vous pouvez faire effectuer au robot.
Les 3 mouvements de base sont :
- Déménagement conjoint — Il s'agit d'un mouvement rapide et brutal où chaque articulation essaie d'atteindre sa position cible le plus rapidement possible. Pour éviter les collisions, les mouvements des articulations ne doivent être programmés que lorsque le robot se déplace dans l'espace libre.
- Déplacement linéaire — Il s'agit d'un mouvement contrôlé le long d'une ligne entre deux poses. Le robot se déplacera nécessairement plus lentement avec un mouvement linéaire, mais n'introduira pas non plus de collisions inutiles.
- Déplacement circulaire — Comme un mouvement linéaire, le robot se déplace sur une ligne contrôlée, cette fois le long d'une trajectoire circulaire.
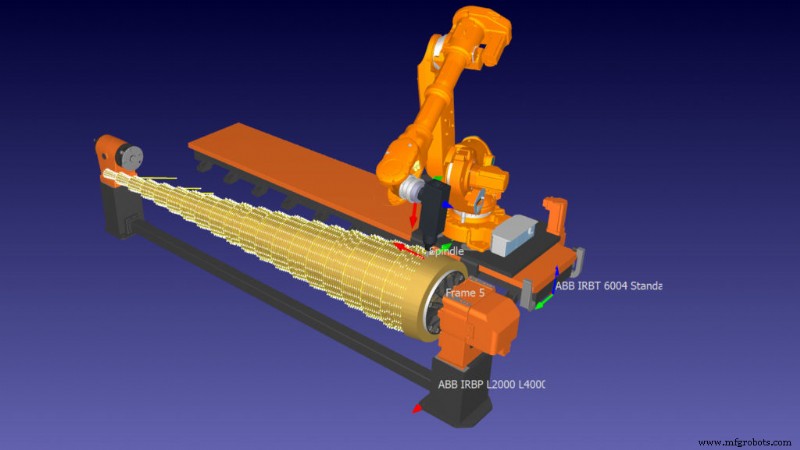
9. Simulation et programmation hors ligne
Il existe de nombreuses façons de programmer un robot, y compris "se salir les mains" avec le langage de programmation (généralement complexe) fourni par le fabricant du robot.
La simulation et la programmation hors ligne offrent une méthode de programmation plus simple. Au lieu de programmer directement le robot physique, vous programmez un modèle simulé du robot à l'aide de commandes intuitives. Le logiciel convertit ensuite le programme en code que le robot physique peut comprendre.
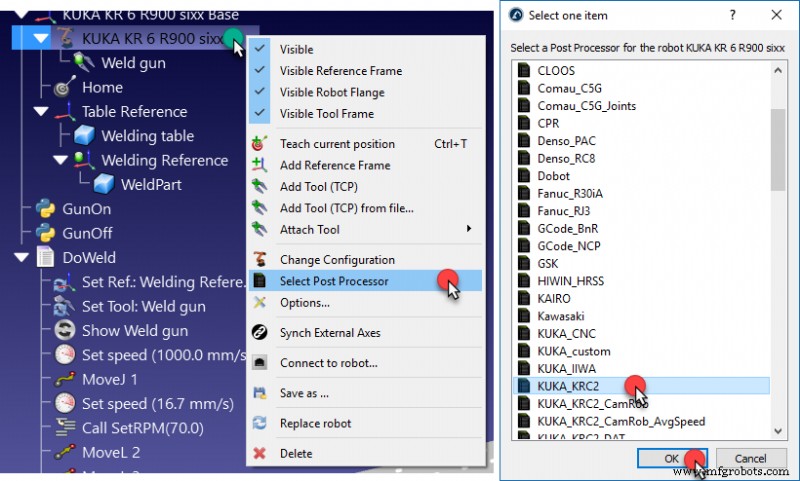
10. Post-processeurs
La partie d'un logiciel de programmation hors ligne qui convertit le programme du robot est appelée post-processeur. Le logiciel de programmation aura un post-processeur différent pour chaque fabricant de robot, parfois plusieurs.
Vous pouvez en savoir plus sur les post-processeurs dans notre article Post-processeurs robots :tout ce que vous devez savoir.
11. Débogage
Quelle que soit la méthode de programmation que vous utilisez, une compétence de base essentielle est le débogage. Vous devez toujours déboguer votre programme pour vous assurer qu'il fonctionne comme vous le souhaitez avant de configurer votre robot en cours d'exécution dans un environnement de production.
La programmation hors ligne vous offre une étape de débogage supplémentaire car vous programmez un modèle simulé du robot avant de télécharger le programme sur le robot physique lui-même, ce qui réduit les risques d'erreurs.
Si vous souhaitez vous lancer immédiatement dans la programmation de robots, vous pouvez télécharger un essai gratuit de RoboDK ici.
Pour quels aspects de base de la programmation de robots aimeriez-vous de l'aide ? Dites-le nous dans les commentaires ci-dessous ou rejoignez la discussion sur LinkedIn, Twitter, Facebook, Instagram ou sur le forum RoboDK.
Robot industriel
- Les avantages de la surveillance à distance, de la programmation à distance et de la maintenance prédictive
- Robots articulés :Guide du robot industriel le plus connu
- Robots cartésiens :Guide de la technologie robotique la plus évolutive
- Robots SCARA :Guide du robot le plus polyvalent et le plus recherché
- Commentaire :comprendre les méthodes de programmation des robots
- Qu'est-ce qu'un filament TPU ? Les bases et le guide utile.
- Quel est le bon moment pour investir dans des outils de programmation de robot ?
- Programmation de robots industriels pour débutants
- Choisir le bon logiciel de préparation de robots