


Qu'est-ce qu'un éditeur de post-processeur et comment l'utiliser ?
Vous utilisez un robot simulé ou une machine CNC… mais il ne fonctionne pas correctement. Serait-il temps d'utiliser un éditeur de post-processeur ?
Que fait un post-processeur et pourquoi voudriez-vous en modifier un ?
Si vous utilisez la programmation hors ligne, il est très probable que vous ayez interagi avec un post-processeur. Vous utilisez peut-être RoboDK pour programmer un robot pour l'usinage robotique ou une autre application robotique. Ou peut-être utilisez-vous un système CAD/CAM qui prend en charge vos machines CNC.
Même si vous n'en êtes pas conscient, vous utilisez un post-processeur chaque fois que vous utilisez un tel système pour programmer vos machines physiques.
Un post-processeur est le pont entre l'environnement simulé et votre machine physique. Il convertit les instructions simulées en code que le robot peut utiliser.
Mais, que se passe-t-il si vous voulez changer comment le programme génère ce code? C'est là qu'un éditeur de post-processeur entre en jeu…
Pourquoi auriez-vous besoin de modifier un post-processeur ?
La plupart des gens n'auront jamais besoin de modifier leur post-processeur.
Si vous utilisez RoboDK, par exemple, il vous suffit de télécharger votre modèle de robot à partir de notre vaste bibliothèque de robots. Nous avons déjà lié chaque modèle à l'un des plus de 80 post-processeurs de RoboDK. Chaque fois que vous envoyez votre programme simulé au robot physique, le post-processeur convertit le code pour vous "sous le capot".
Cependant, dans certaines situations, vous devrez modifier votre post-processeur.
Chaque fabricant de robots utilise son propre langage de programmation propriétaire, qui s'exécute sur son propre contrôleur de robot. Chaque contrôleur dispose d'une gamme d'options et de fonctionnalités de configuration différentes. Le post-processeur est l'endroit où vous pouvez définir toutes ces options de configuration personnalisées.

Par exemple, les contrôleurs de robot Techman incluent une option de sécurité pour demander à l'utilisateur un mot de passe avant de pouvoir reprogrammer le robot. Le post-processeur est l'endroit où vous trouverez les options pour activer, désactiver et définir ce mot de passe. Tous les robots n'ont pas cette option.
Qu'est-ce qu'un éditeur de post-processeur ?
Un éditeur de post-processeur est un logiciel dédié qui est utilisé pour éditer des fichiers de post-processeur de robot ou de CNC. Cela rend l'édition post-processeur plus intuitive qu'avec un éditeur de texte standard, qui est la seule option pour de nombreux systèmes de programmation.
Un exemple d'un tel logiciel est l'éditeur de post-processeur inclus dans RoboDK.
Les post-processeurs RoboDK sont écrits dans le langage de programmation Python. Pour chacun des post-processeurs pris en charge, il existe une bibliothèque compilée (un fichier PYC) et un script Python modifiable contenant toutes les propriétés de configuration.
Ces fichiers de configuration peuvent être modifiés avec n'importe quel éditeur de texte standard si vous souhaitez un contrôle total de la configuration. Cependant, RoboDK propose également un éditeur de post-processeur plus intuitif. Cela vous permet de modifier les paramètres de votre robot choisi sans avoir à vous impliquer du tout dans le code.
Comment modifier facilement un post-processeur
Dans RoboDK, le moyen le plus simple de modifier votre post-processeur consiste à utiliser notre éditeur de post-processeur. Il fournit des informations sur le moment où vous êtes le plus susceptible d'utiliser chacun des paramètres et des valeurs recommandées. Avec cet outil, vous couvrirez la grande majorité des cas d'utilisation de votre robot.
Chaque post-processeur contient une liste de propriétés de configuration. Ceux-ci varient en fonction du fabricant de votre robot.
Certains post-processeurs incluent très peu de propriétés. Par exemple, le post-processeur des robots Mecademic n'inclut qu'une seule propriété (le type de fichier du fichier programme).
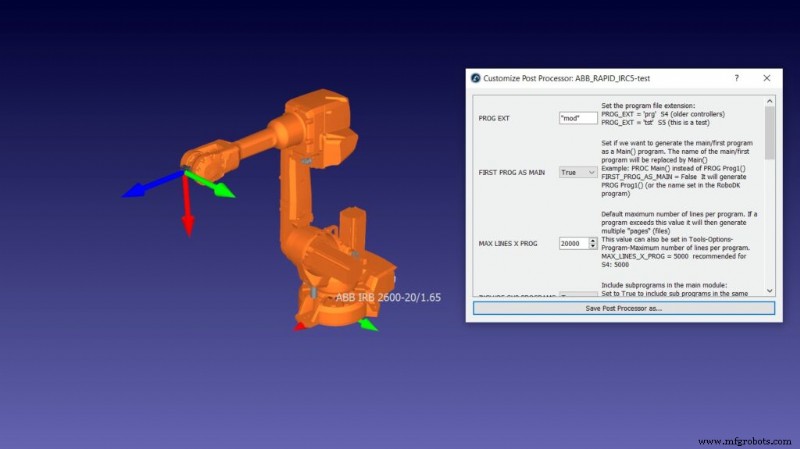
D'autres post-processeurs incluent de nombreuses propriétés. Par exemple, le post-processeur ABB_RAPID_IRC5 pour les robots ABB a 16 propriétés, allant de la vitesse par défaut du robot aux indicateurs de configuration pour les platines externes.
Quel que soit le robot que vous utilisez, le moyen le plus simple de modifier son post-processeur est de le charger dans l'éditeur RoboDK. Vous pourrez voir toutes les propriétés de configuration disponibles et décider lesquelles sont les plus adaptées à votre application.
Guide d'édition simple du post-processeur
Lorsque vous ouvrez l'éditeur de post-processeur, vous serez accueilli par une liste des propriétés disponibles.
Comment décidez-vous des propriétés à ajuster et des valeurs à leur attribuer ?
Prenons un exemple précis pour illustrer le processus… Nous allons nous intéresser au post-processeur AUBO pour la gamme de robots collaboratifs de l'entreprise.
Le post-processeur AUBO contient les propriétés suivantes :
- PROG EXT — Ceci est l'extension du programme et est inclus dans de nombreux post-processeurs. Il spécifie le type de fichier que RoboDK va générer.
- SPEED MS et SPEED RAD — Ceci spécifie la vitesse en mètres par seconde et en radians pour les mouvements circulaires.
- ACCEL MSS et ACCEL RADSS :spécifie l'accélération du robot en mètres par seconde au carré ou en radians par seconde au carré pour les accélérations circulaires.
Comme vous pouvez le voir, les propriétés sont souvent claires uniquement à partir de leurs conventions de dénomination. Cependant, lorsque le but d'une propriété n'est pas immédiatement évident, il y a généralement une description de celle-ci dans l'éditeur et souvent des valeurs recommandées également.
Si vous ne parvenez toujours pas à déterminer le but d'une propriété particulière, vous pourrez peut-être trouver des informations dans le manuel de votre robot ou vous pouvez poser une question sur le forum RoboDK.
Où trouver le nouvel éditeur de post-processeur RoboDK
Vous avez commencé à éditer le post-processeur de votre robot avec l'éditeur RoboDK !
Vous trouverez des informations sur l'activation et l'utilisation de l'éditeur sur notre page de documentation.
Des questions ? Dites-le nous dans les commentaires ci-dessous ou rejoignez la discussion sur LinkedIn, Twitter, Facebook, Instagram ou sur le forum RoboDK. Consultez également notre vaste collection de vidéos et abonnez-vous à la chaîne YouTube RoboDK
Robot industriel
- Logiciel de décodage de maintenance préventive :ce qu'il fait et comment l'utiliser
- Mise en service à distance :pourquoi vous en avez besoin et comment l'utiliser
- Performance totale efficace de l'équipement :qu'est-ce que le TEEP et comment l'utiliser pour améliorer la planification
- Qu'est-ce qu'une chute de pression et comment la prévenir ?
- Qu'est-ce qu'un compacteur et comment choisir le bon ?
- Embrayages industriels :que sont-ils et comment les utilisez-vous ?
- Microcontrôleur PIC18 :qu'est-ce que c'est et comment l'utiliser
- Qu'est-ce qu'une machine de ferronnerie et pourquoi en avez-vous besoin ?
- Qu'est-ce qu'un désignateur de référence et comment l'utiliser dans l'assemblage ?