


Tutoriel Arduino 04 :Moteurs
Bienvenue dans le quatrième tutoriel Arduino de notre série de tutoriels Arduino. Dans ce didacticiel, nous allons apprendre à contrôler les moteurs à courant continu et les servomoteurs à l'aide de PWM (modulation de largeur d'impulsion).
Il s'agit d'un didacticiel vidéo étape par étape facile à suivre. En outre, sous la vidéo, vous pouvez trouver les pièces dont nous avons besoin pour ce didacticiel et les codes sources des exemples de la vidéo.
Composants nécessaires pour le premier exemple
Divulgation :il s'agit de liens d'affiliation. En tant qu'associé Amazon, je gagne des achats éligibles.
Schéma du circuit du premier exemple, contrôle d'un moteur à courant continu
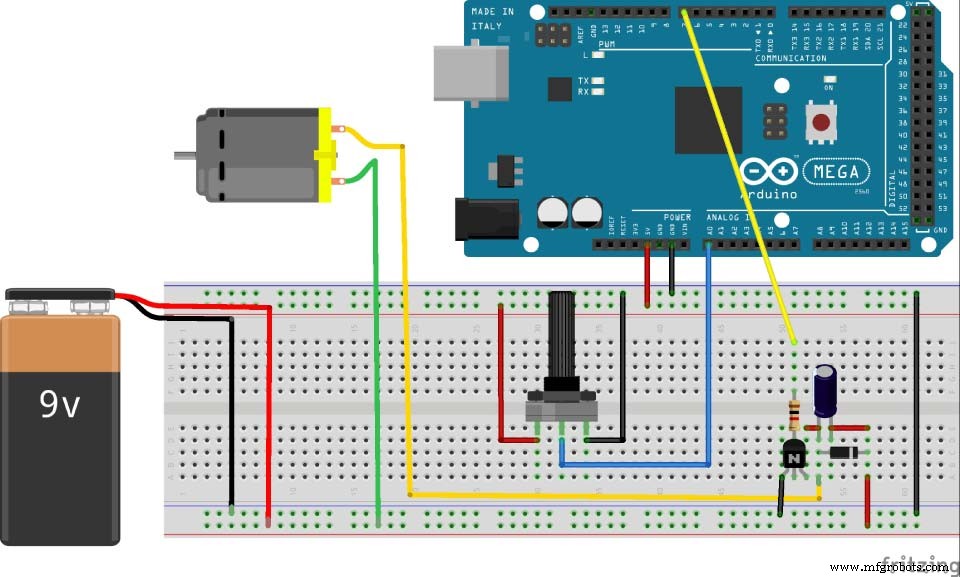
Code source du premier exemple, contrôlant un moteur à courant continu
int pwmPin = 7;
void setup() {
Serial.begin(9600);
pinMode( pwmPin, OUTPUT);
}
void loop () {
int potValue = analogRead(A0);
int newpotValue = map(potValue, 0, 1023, 0 , 255);
analogWrite(pwmPin, newpotValue);
}Code language: Arduino (arduino)
Pièces nécessaires pour le deuxième exemple, contrôler un servomoteur
Schéma du circuit du deuxième exemple, contrôle d'un servomoteur
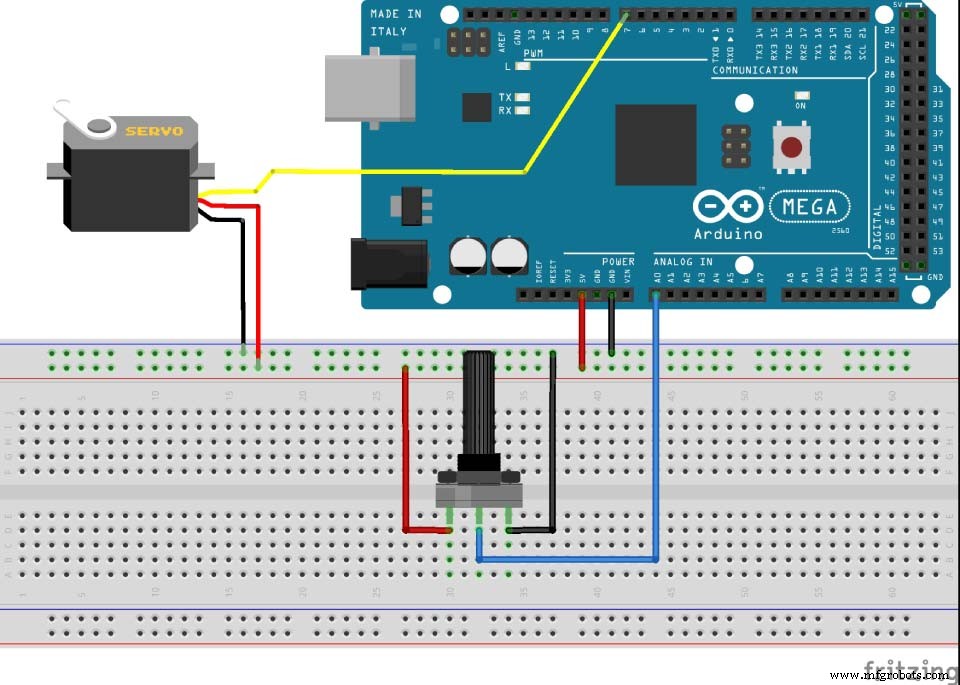
Code source du deuxième exemple, contrôlant un servomoteur
#include <Servo.h>
Servo myServo;
void setup() {
myServo.attach(7);
}
void loop() {
int potValue = analogRead(A0);
int angleValue = map(potValue, 0, 1023, 0, 180);
myServo.write(angleValue);
delay(10);
}Code language: Arduino (arduino)
Processus de fabrication