


Moteur CC sans balais
Les moteurs à courant continu sans balais ont été développés à partir de moteurs à courant continu à balais conventionnels avec la disponibilité de semi-conducteurs de puissance à semi-conducteurs. Alors, pourquoi parlons-nous des moteurs à courant continu sans balais dans un chapitre sur les moteurs à courant alternatif ?
Les moteurs à courant continu sans balais sont similaires aux moteurs synchrones à courant alternatif. La principale différence est que les moteurs synchrones développent une FEM arrière sinusoïdale , par rapport à une force électromagnétique arrière rectangulaire ou trapézoïdale pour les moteurs à courant continu sans balais.
Les deux ont un stator créé des champs magnétiques tournants produisant un couple dans un rotor magnétique.
Les moteurs synchrones sont généralement de grande taille, de plusieurs kilowatts, souvent avec des rotors à électro-aimant. Les vrais moteurs synchrones sont considérés comme à une seule vitesse, un sous-multiple de la fréquence de la ligne électrique. Les moteurs à courant continu sans balais ont tendance à être petits, de quelques watts à des dizaines de watts, avec des rotors à aimants permanents.
La vitesse d'un moteur à courant continu sans balai n'est pas fixe à moins qu'elle ne soit entraînée par une boucle à verrouillage de phase asservie à une fréquence de référence. Le style de construction est soit cylindrique, soit en galette.
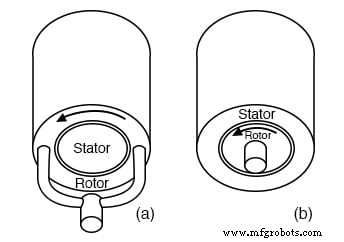
Construction cylindrique :(a) rotor extérieur, (b) rotor intérieur
La construction la plus courante, cylindrique, peut prendre deux formes (figure ci-dessus). Le style cylindrique le plus courant est avec le rotor à l'intérieur, en haut à droite. Ce style de moteur est utilisé dans les disques durs. Il est également possible de mettre le rotor à l'extérieur entourant le stator.
C'est le cas des moteurs de ventilateurs à courant continu sans balais, sans l'arbre. Ce style de construction peut être court et robuste. Cependant, la direction du flux magnétique est radiale par rapport à l'axe de rotation.
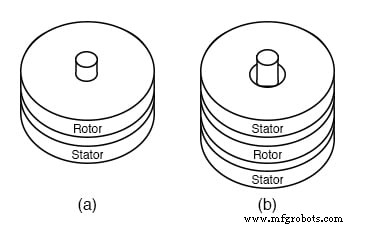
Construction du moteur Pancake :(a) stator simple, (b) stator double
Les moteurs pancake à couple élevé peuvent avoir des bobines de stator des deux côtés du rotor (figure ci-dessus-b).
Les applications à faible couple comme les moteurs de lecteur de disquette suffisent avec une bobine de stator sur un côté du rotor (Figure ci-dessus-a). La direction du flux magnétique est axiale, c'est-à-dire parallèle à l'axe de rotation.
La fonction de commutation peut être assurée par différents capteurs de position d'arbre :codeur optique, un codeur magnétique (résolveur, synchro...), ou des capteurs magnétiques à effet Hall. Les petits moteurs bon marché utilisent des capteurs à effet Hall.
Un capteur à effet Hall est un dispositif semi-conducteur dans lequel le flux d'électrons est affecté par un champ magnétique perpendiculaire à la direction du flux de courant. Cela ressemble à un réseau de résistances variables à quatre bornes. Les tensions aux deux sorties sont complémentaires.
L'application d'un champ magnétique au capteur provoque un petit changement de tension à la sortie. La sortie Hall peut piloter un comparateur pour fournir une commande plus stable au dispositif d'alimentation. Ou, il peut piloter un étage de transistor composé s'il est correctement polarisé.
Les capteurs à effet Hall plus modernes peuvent contenir un amplificateur intégré et des circuits numériques. Ce dispositif à 3 fils peut piloter directement le transistor de puissance alimentant un enroulement de phase. Le capteur doit être monté à proximité du rotor à aimant permanent pour détecter sa position.

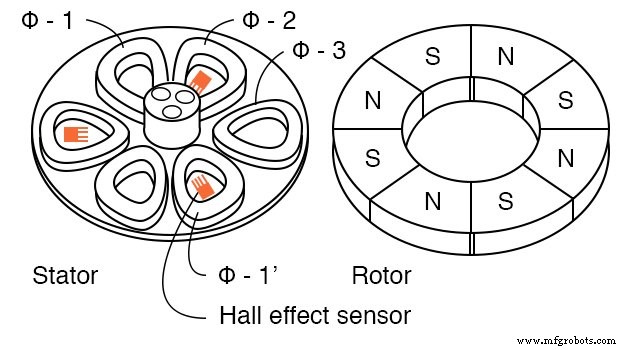
Les capteurs à effet Hall commutent un moteur CC sans balai de 3 φ
Le simple moteur cylindrique 3-φ (figure ci-dessus) est commuté par un dispositif à effet Hall pour chacune des trois phases du stator. Le changement de position du rotor à aimant permanent est détecté par le dispositif à effet Hall lorsque la polarité du pôle du rotor qui passe change.
Ce signal Hall est amplifié de sorte que les bobines du stator soient entraînées avec le courant approprié. Non illustré ici, les signaux Hall peuvent être traités par une logique combinatoire pour des formes d'onde d'entraînement plus efficaces.
Le moteur cylindrique ci-dessus pourrait entraîner un disque dur s'il était équipé d'une boucle à verrouillage de phase (PLL) pour maintenir une vitesse constante. Des circuits similaires pourraient entraîner le moteur du lecteur de disquette Pancake (figure ci-dessous). Encore une fois, il faudrait une PLL pour maintenir une vitesse constante.
Moteur à crêpes sans balais
Le moteur pancake 3-φ a 6 pôles de stator et 8 pôles de rotor. Le rotor est un anneau plat en ferrite aimanté avec huit pôles alternatifs aimantés axialement. Nous ne montrons pas que le rotor est coiffé d'une plaque en acier doux pour le montage sur le roulement au milieu du stator.
La plaque d'acier permet également de compléter le circuit magnétique. Les pôles du stator sont également montés sur une plaque d'acier, aidant à fermer le circuit magnétique.
Les bobines de stator plates sont trapézoïdales pour s'adapter plus étroitement aux bobines et se rapprocher des pôles du rotor. Les bobines à 6 stators comprennent trois phases d'enroulement.
Si les trois phases du stator étaient alimentées successivement, un champ magnétique tournant serait généré.
Le rotor à aimant permanent suivrait comme dans le cas d'un moteur synchrone. Un rotor bipolaire suivrait ce champ à la même vitesse de rotation que le champ tournant. Cependant, notre rotor à 8 pôles tournera à un sous-multiple de cette vitesse en raison des pôles supplémentaires dans le rotor.
Le moteur de ventilateur CC sans balai présente les caractéristiques suivantes :

Moteur de ventilateur sans balais, 2-φ
- Le stator a 2 phases réparties entre 4 pôles
- Il y a 4 pôles saillants sans enroulements pour éliminer les points de couple nuls.
- Le rotor a quatre pôles d'entraînement principaux.
- Le rotor a 8 pôles superposés pour aider à éliminer les points de couple nul.
- Les capteurs à effet Hall sont espacés de 45o physiques.
- Le boîtier du ventilateur est placé au-dessus du rotor, qui est placé sur le stator.
L'objectif d'un moteur de ventilateur sans balai est de minimiser le coût de fabrication. C'est une incitation à déplacer les produits moins performants d'une configuration 3-φ à une configuration 2-φ. Selon la façon dont il est entraîné, il peut être appelé un moteur de 4 φ.
Vous vous souviendrez peut-être que les moteurs à courant continu conventionnels ne peuvent pas avoir un nombre pair de pôles d'induit (2, 4, etc.) s'ils doivent être à démarrage automatique, 3, 5, 7 étant communs. Ainsi, il est possible qu'un moteur hypothétique à 4 pôles s'arrête à un couple minimum, où il ne peut pas être démarré à partir du repos.
L'ajout des quatre petits pôles saillants sans enroulements superpose un couple d'ondulation sur la courbe couple en fonction de la position. Lorsque ce couple d'ondulation est ajouté à la courbe de couple sous tension normale, le résultat est que les minimums de couple sont partiellement supprimés.
Cela permet de démarrer le moteur pour toutes les positions d'arrêt possibles. L'ajout de huit pôles à aimant permanent au rotor à aimant permanent normal à 4 pôles superpose un petit couple d'ondulation harmonique sur le couple d'ondulation normal à 4 pôles.
Cela supprime en outre les minimums de couple. Tant que les minima de couple ne tombent pas à zéro, nous devrions pouvoir démarrer le moteur. Plus nous réussissons à supprimer les minimums de couple, plus le démarrage du moteur est facile.
Le stator 2-φ nécessite que les capteurs à effet Hall soient espacés de 90° électrique. Si le rotor était un rotor à 2 pôles, les capteurs Hall seraient placés à 90° physique. Comme nous avons un rotor à aimants permanents à 4 pôles, les capteurs doivent être placés à 45° physique pour atteindre les 90° espacement électrique. (Notez l'espacement des halls ci-dessus.)
La majorité du couple est due à l'interaction des bobines 2-φ internes du stator avec la section à 4 pôles du rotor. De plus, la section à 4 pôles du rotor doit être en bas pour que les capteurs à effet Hall détectent les signaux de commutation appropriés.
La section rotor à 8 pôles sert uniquement à améliorer le démarrage du moteur.

Moteur CC sans balais 2-φ entraînement push-pull
Dans la figure ci-dessus, le variateur push-pull 2-φ (également appelé variateur 4-φ) utilise deux capteurs à effet Hall pour piloter quatre enroulements. Les capteurs sont espacés de 90° à part électrique, qui est de 90° physique pour un rotor unipolaire.
Étant donné que le capteur Hall a deux sorties complémentaires, un capteur assure la commutation de deux enroulements opposés.
Technologie industrielle
- Moteurs à collecteur AC
- Nanotec :contrôleur de moteur compact pour moteurs CC sans balais et moteurs pas à pas
- Comment dépanner les moteurs à rotor bobiné
- Conseil sur les moteurs électriques :Minimisez vos démarrages
- Conseil technique :Moteurs
- Sécurité des moteurs électriques :différentes phases et mesures de sécurité
- 4 principaux types de défaillances d'enroulement dans les moteurs électriques à courant alternatif
- À propos des moteurs industriels et des applications
- Moteurs BLDC et automatisation