


Moteurs à collecteur AC
Le premier travail de Charles Proteus Steinmetz après son arrivée en Amérique était d'enquêter sur les problèmes rencontrés dans la conception de la version à courant alternatif du moteur à collecteur à balais. La situation était si mauvaise que les moteurs ne pouvaient pas être conçus avant la construction proprement dite.
Le succès ou l'échec d'une conception de moteur n'est connu que lorsqu'il est réellement construit et testé. Il a formulé les lois de l'hystérésis magnétique en trouvant une solution. L'hystérésis est un retard de l'intensité du champ magnétique par rapport à la force magnétisante. Cela produit une perte qui n'est pas présente dans le magnétisme CC.
Alliages à faible hystérésis et rupture de l'alliage en laminages isolés minces a permis de concevoir avec précision des moteurs à collecteur AC avant la construction.
Les moteurs à collecteur CA, comme les moteurs CC comparables, ont un couple de démarrage et une vitesse plus élevés que les moteurs à induction CA.
Le moteur série fonctionne bien au-dessus de la vitesse synchrone d'un moteur à courant alternatif conventionnel. Les moteurs à collecteur CA peuvent être monophasés ou polyphasés. La version monophasée à courant alternatif subit une pulsation de couple à double fréquence de ligne, non présente dans le moteur polyphasé.
Étant donné qu'un moteur à collecteur peut fonctionner à une vitesse beaucoup plus élevée qu'un moteur à induction, il peut produire plus de puissance qu'un moteur à induction de taille similaire. Cependant, les moteurs à collecteur ne nécessitent pas autant d'entretien que les moteurs à induction, en raison de l'usure des balais et du collecteur.
Moteur série monophasé
Si un moteur série à courant continu équipé d'un champ laminé est connecté au courant alternatif, la réactance retardée de la bobine de champ réduira considérablement le courant de champ. Tant qu'un tel moteur tournera, l'opération est marginale.
Lors du démarrage, les enroulements d'induit connectés aux segments de commutateur court-circuités par les balais ressemblent à des tours de transformateur court-circuités vers le champ. Cela se traduit par des arcs et des étincelles considérables au niveau des balais lorsque l'armature commence à tourner.
C'est moins un problème à mesure que la vitesse augmente, ce qui partage l'arc et les étincelles entre les segments de collecteur. Les moteurs AC de la série plus petits que les perceuses à main et les mélangeurs de cuisine peuvent ne pas être compensés. (Figure ci-dessous)
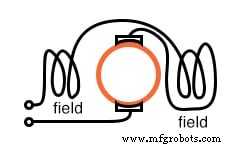
Moteur AC série non compensé
Moteur série compensé
L'arc et les étincelles sont atténués en plaçant un enroulement de compensation le stator en série avec l'induit positionné de telle sorte que sa force magnétomotrice (mmf) annule l'induit AC mmf.
Un entrefer plus petit du moteur et moins de tours de champ réduisent la réactance retardée en série avec l'armature améliorant le facteur de puissance. Tous les moteurs à collecteur CA, sauf les très petits, utilisent des enroulements de compensation. Les moteurs aussi gros que ceux utilisés dans un mélangeur de cuisine, ou plus gros, utilisent des enroulements de stator compensés.
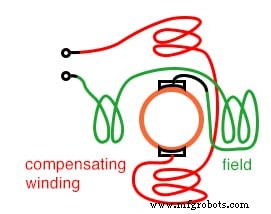
Moteur AC série compensé
Moteur Universel
Il est possible de concevoir des moteurs universels de petite taille (moins de 300 watts) qui fonctionnent à partir de DC ou AC. Les très petits moteurs universels peuvent ne pas être compensés. Les moteurs universels plus grands et plus rapides utilisent un enroulement de compensation.
Un moteur fonctionnera plus lentement en courant alternatif qu'en courant continu en raison de la réactance rencontrée avec le courant alternatif. Cependant, les pics des ondes sinusoïdales saturent le chemin magnétique réduisant le flux total en dessous de la valeur CC, augmentant la vitesse du moteur « série ».
Ainsi, les effets de compensation se traduisent par une vitesse presque constante de DC à 60 Hz. Les petits appareils fonctionnant en ligne, tels que les perceuses, les aspirateurs et les mélangeurs, nécessitant 3000 à 10 000 tr/min utilisent des moteurs universels.
Cependant, le développement de redresseurs à semi-conducteurs et d'aimants permanents bon marché fait du moteur à aimant permanent à courant continu une alternative viable.
Moteur de répulsion
Un moteur à répulsion se compose d'un champ directement connecté à la tension secteur AC et d'une paire de balais court-circuités décalés de 15° à 25° de l'axe du champ. Le champ induit un flux de courant dans l'armature en court-circuit dont le champ magnétique s'oppose à celui des bobines de champ.
La vitesse peut être contrôlée en faisant tourner les brosses par rapport à l'axe du champ. Ce moteur a une commutation supérieure en dessous de la vitesse synchrone, une commutation inférieure au-dessus de la vitesse synchrone. Le faible courant de démarrage produit un couple de démarrage élevé.
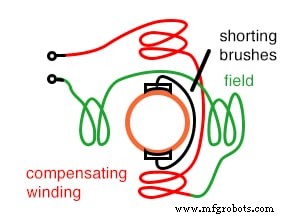
Moteur AC à répulsion
Moteur à induction à démarrage par répulsion
Lorsqu'un moteur à induction entraîne une charge de démarrage difficile comme un compresseur, le couple de démarrage élevé du moteur de répulsion peut être utilisé. Les enroulements du rotor du moteur à induction sont amenés aux segments du collecteur pour le démarrage par une paire de balais en court-circuit.
À une vitesse proche de la course, un interrupteur centrifuge court-circuite tous les segments du collecteur, donnant l'effet d'un rotor à cage d'écureuil. Les brosses peuvent également être soulevées pour prolonger la durée de vie des brosses. Le couple de démarrage est de 300 % à 600 % de la valeur de pleine vitesse par rapport à moins de 200 % pour un moteur à induction pur.
Résumé :Moteurs à collecteur AC
- Le moteur série monophasé est une tentative de construire un moteur comme un moteur à collecteur à courant continu. Le moteur qui en résulte n'est pratique que dans les plus petites tailles.
- L'ajout d'un enroulement de compensation donne le moteur série compensé , surmontant les étincelles excessives du commutateur. La plupart des moteurs à collecteur AC sont de ce type. À grande vitesse, ce moteur fournit plus de puissance qu'un moteur à induction de même taille mais ne nécessite pas d'entretien.
- Il est possible de produire des moteurs de petits appareils alimentés en courant alternatif ou en courant continu. C'est ce qu'on appelle un moteur universel .
- La ligne AC est directement connectée au stator d'un moteur à répulsion avec le collecteur court-circuité par les balais.
- Les balais rétractables en court-circuit peuvent démarrer un moteur à induction à rotor bobiné. C'est ce qu'on appelle un moteur à induction à démarrage par répulsion.
Technologie industrielle
- Moteurs à induction monophasés
- Conseil technique :Moteurs
- Moteurs électriques surdimensionnés :faut-il les remplacer ?
- Sécurité des moteurs électriques :différentes phases et mesures de sécurité
- 4 principaux types de défaillances d'enroulement dans les moteurs électriques à courant alternatif
- À propos des moteurs industriels et des applications
- Une introduction au moteur BLDC
- Cinq raisons pour lesquelles les moteurs TEFC échouent
- Entretien correct des moteurs de compresseur