


Swiper - Auto Tinder/Bumble Swiper
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Histoire
Mes amis m'ont fait un Tinder et comme la plupart des gens sur l'application, j'ai rapidement été déçu par sa monotonie. Ensuite, j'ai réalisé que j'étais un bien meilleur ingénieur que j'étais un partenaire potentiel, alors j'ai reconstitué cela à partir d'un moteur pas à pas bon marché que j'avais autour. Alors maintenant, vous pouvez également obtenir plus de 800 balayages par heure avec cela sur Bumble ou Tinder !
Présentation rapide :
Il y a trois étapes rapides pour cette construction :imprimer les pièces, le câblage + tester le moteur pas à pas et tout assembler.
Étape 1 :Impression des pièces
Consultez https://www.thingverse.com/thing:2849598 pour les fichiers imprimables en 3D. La principale chose à noter à propos de ces fichiers est que j'ai utilisé 50% de remplissage pour créer la base, ceci afin d'alourdir la base afin qu'elle ne bouge pas pendant qu'elle glisse.
Étape 2 :le moteur pas à pas
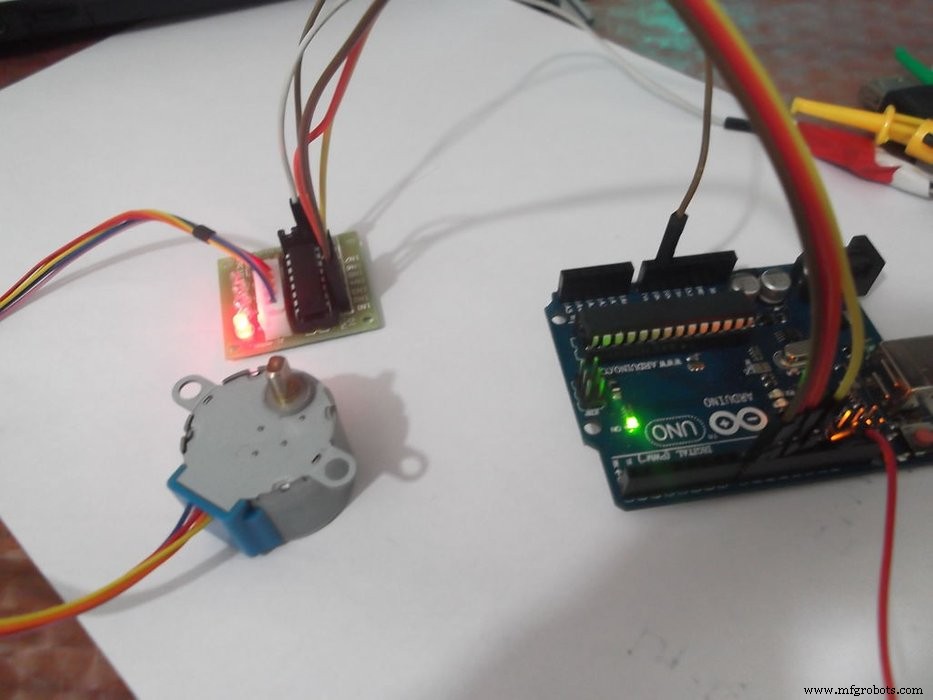
J'ai utilisé un moteur pas à pas unipolaire 28-BYJ48 et un pilote de moteur pas à pas SBT0811. Tout pilote de moteur pas à pas qui fonctionne avec le 28-BYJ48 devrait convenir, assurez-vous simplement de le câbler à votre Arduino Uno selon la configuration suivante, ou modifiez le code afin de refléter vos modifications :
- IN1>> D8
- IN2>> D9
- IN3>> D10
- IN4>> D11
- VCC>> 5V
- Gnd>> Terre
Le code de l'Arduino Uno est en bas de la page. À ce stade, vous devriez pouvoir simplement télécharger le code sur votre Arduino et disposer d'un moteur pas à pas tournant dans le sens des aiguilles d'une montre ! Si vous souhaitez changer le sens de rotation dans le sens inverse des aiguilles d'une montre, changez simplement le Direction variable à faux

Étape 3 : assembler le tout
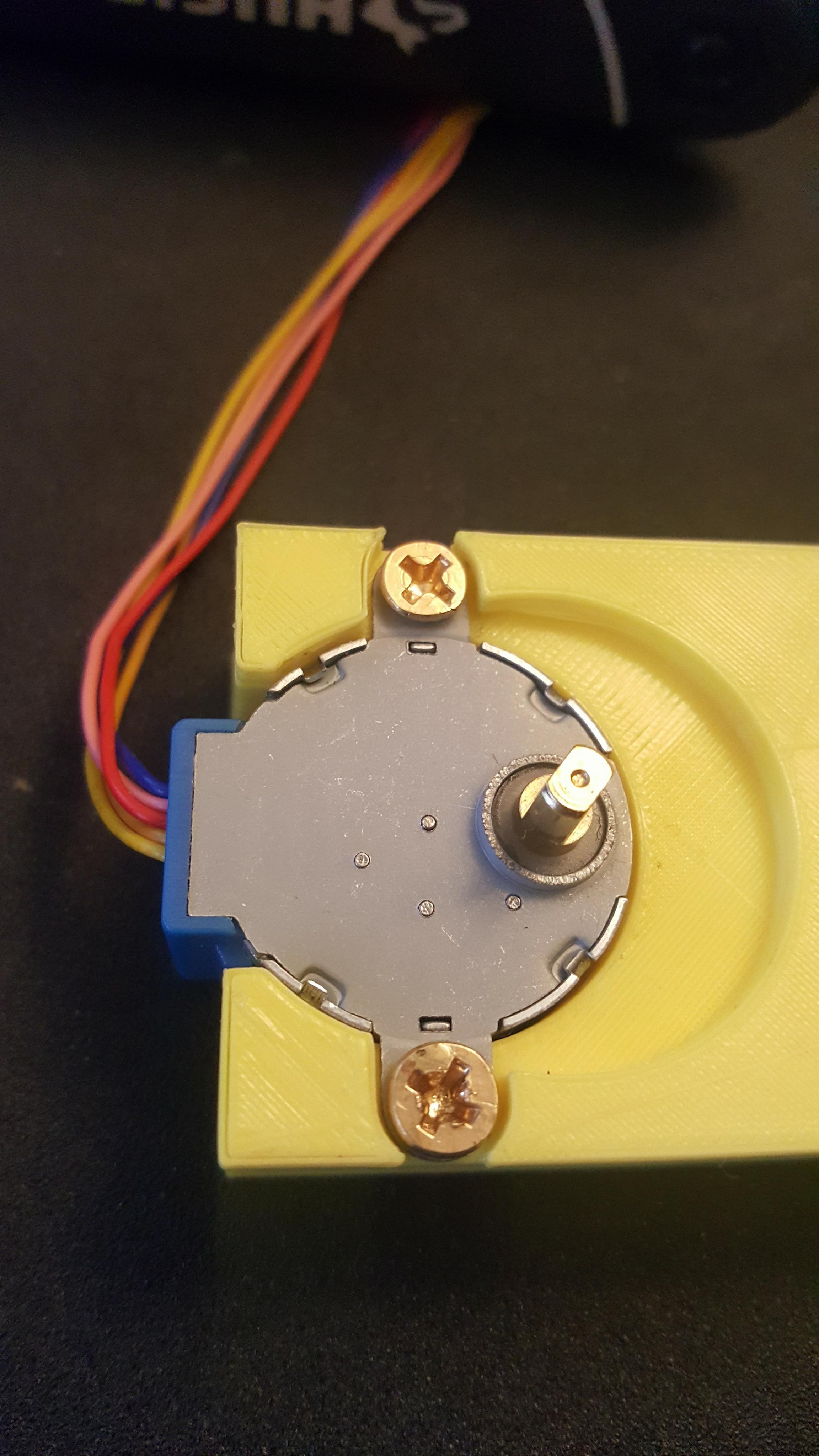
À ce stade, vous avez toutes les pièces séparées prêtes et nous n'avons plus qu'à les combiner ! Allez-y et placez d'abord votre moteur pas à pas à l'intérieur de la base du swiper. J'ai utilisé deux petites vis à bois pour le fixer dans l'impression 3D.
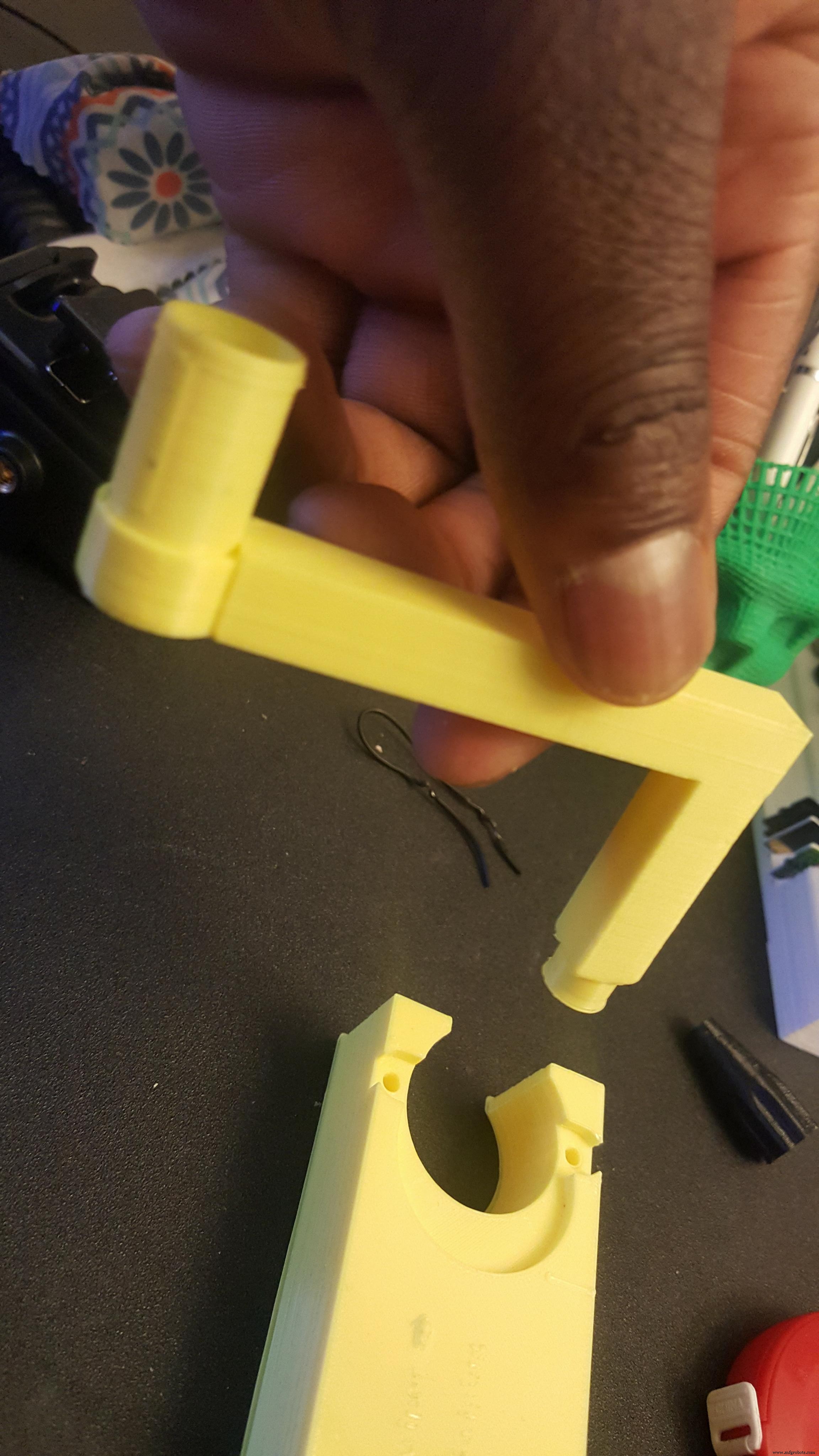
Ensuite, allez-y et placez la poignée de l'essuie-glace sur le moteur pas à pas.
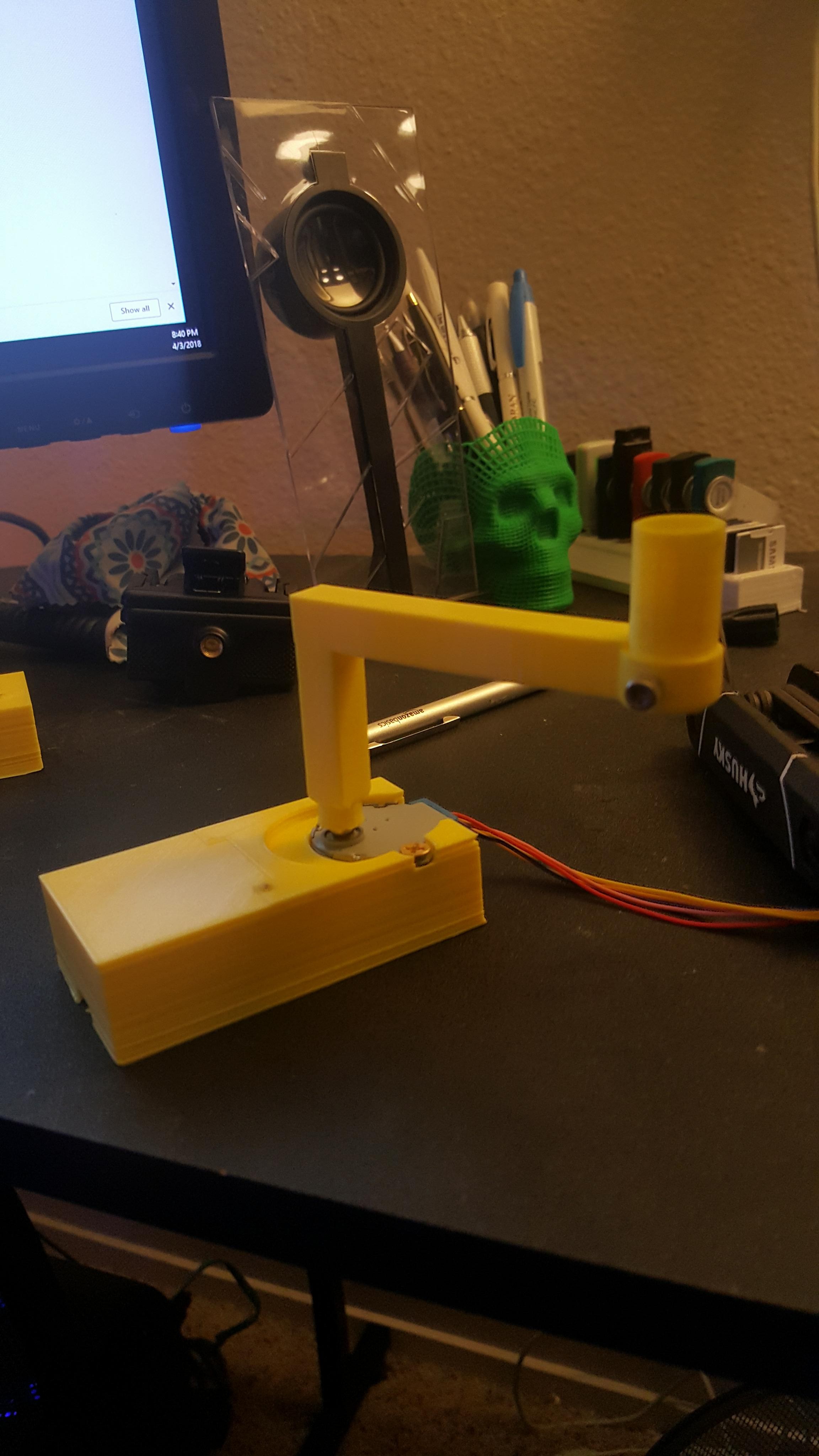
Afin de calibrer la hauteur; placez toute la structure au-dessus d'un téléphone et placez le stylet pour écran tactile dans la poignée de balayage jusqu'à ce que le stylet pour écran tactile touche l'écran.

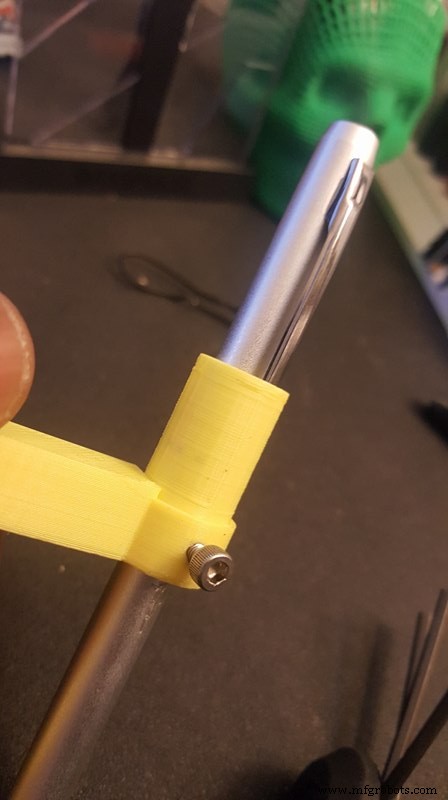
À ce stade, prenez une courte vis M3 et fixez votre stylet pour écran tactile afin qu'il ne bouge pas lorsqu'il glisse.
Enfin, faites glisser
Placez toute la structure à côté du téléphone, ouvrez l'application de rencontres souhaitée, tournez l'application Arduino et asseyez-vous !
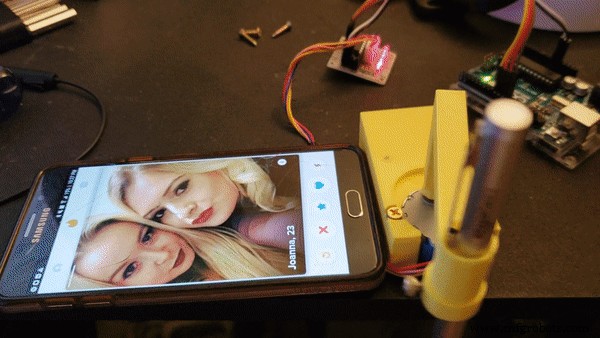
J'ai testé cela sur 4 téléphones différents et l'un des téléphones avait du mal à enregistrer correctement les balayages et irait à l'écran précédent. C'est parce que le bord du dernier téléphone testé était assez sensible, vous pouvez résoudre ce problème en plaçant votre téléphone dans un étui avec un bord surélevé, de cette façon le stylet de l'écran tactile ne s'enregistrera pas au bord de l'écran.
Code
- Swiper
SwiperArduino
Change Direction =false to true si vous voulez changer la direction de balayage !/* BYJ48 Code du moteur pas à pas Connecter :IN1>> D8 IN2>> D9 IN3>> D10 IN4>> D11 VCC>> 5V Gnd écrit par :Mohannad Rawashdeh https://www.instructables.com/member/Mohannad+Rawashdeh/ 28/9/2013 */#define IN1 8#define IN2 9#define IN3 10#define IN4 11int Steps =0;boolean Direction =false; //change à true pour un balayage à droiteunsigned long last_time;unsigned long currentMillis;int steps_left=4095;long time;void setup(){Serial.begin(115200);pinMode(IN1, OUTPUT); pinMode (IN2, SORTIE); pinMode (IN3, SORTIE); pinMode (IN4, SORTIE); // delay(1000);}boucle vide(){ while(steps_left>0){ currentMillis =micros(); if(currentMillis-last_time>=1000){ stepper(1) ; heure=heure+micros()-last_time; last_time=micros(); étapes_gauche--; } } steps_left=4095;}void stepper(int xw){ for (int x=0;x7){Étapes=0;}if(Étapes<0){Étapes=7; }} Processus de fabrication
- Moteurs pas à pas
- Les pilotes intégrés facilitent la conception des moteurs pas à pas
- Prototype Raspoulette
- Robot Pi simple
- Tourelle de sentinelle Nerf autonome
- Bibliothèque de moteurs pas à pas bipolaires
- La zone grise entre les servomoteurs et les moteurs pas à pas
- Qu'est-ce qu'un moteur linéaire ?
- Qu'est-ce qu'un servomoteur ?