


Moteurs synchrones
Moteurs synchrones monophasés
Les moteurs synchrones monophasés sont disponibles en petites tailles pour les applications nécessitant une synchronisation précise telles que le chronométrage, (horloges) et les lecteurs de bande. Bien que les horloges régulées à quartz alimentées par batterie soient largement disponibles, la variété à courant alternatif a une meilleure précision à long terme, sur une période de plusieurs mois.
Cela est dû au fait que les exploitants de centrales électriques maintiennent délibérément la précision à long terme de la fréquence du système de distribution CA. S'il est en retard de quelques cycles, ils rattraperont les cycles perdus du courant alternatif afin que les horloges ne perdent pas de temps.
Grands et petits moteurs synchrones
Au-dessus de 10 chevaux (10 kW), le rendement plus élevé et le facteur de puissance de premier plan rendent les gros moteurs synchrones utiles dans l'industrie. Les gros moteurs synchrones sont quelques pour cent plus efficaces que les moteurs à induction les plus courants, bien que le moteur synchrone soit plus complexe.
Étant donné que les moteurs et les générateurs sont de construction similaire, il devrait être possible d'utiliser un générateur comme moteur et, inversement, d'utiliser un moteur comme générateur.
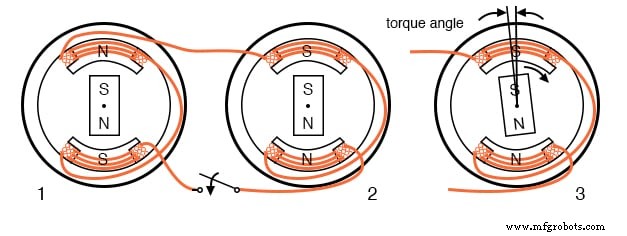
Un moteur asynchrone est similaire à un alternateur à champ tournant. La figure ci-dessous montre de petits alternateurs avec un champ tournant à aimant permanent. La figure ci-dessous pourrait être soit deux alternateurs en parallèle et synchronisés entraînés par des sources d'énergie mécaniques, soit un alternateur entraînant un moteur synchrone. Ou, il pourrait s'agir de deux moteurs, si une source d'alimentation externe était connectée.
Le fait est que dans les deux cas, les rotors doivent fonctionner à la même fréquence nominale et être en phase les uns avec les autres. C'est-à-dire qu'ils doivent être synchronisés . La procédure de synchronisation de deux alternateurs consiste à (1) ouvrir l'interrupteur, (2) entraîner les deux alternateurs à la même vitesse de rotation, (3) avancer ou retarder la phase d'une unité jusqu'à ce que les deux sorties CA soient en phase, (4) fermer l'interrupteur avant qu'ils ne déphasent.
Une fois synchronisés, les alternateurs seront verrouillés les uns aux autres, nécessitant un couple considérable pour détacher une unité (hors synchronisation) de l'autre.
Moteur synchrone fonctionnant au pas de l'alternateur
Comptabilisation du couple avec les moteurs synchrones
Si plus de couple dans le sens de rotation est appliqué au rotor de l'un des alternateurs rotatifs ci-dessus, l'angle du rotor avancera (opposé de (3)) par rapport au champ magnétique dans les bobines du stator tout en étant toujours synchronisé et le le rotor fournira de l'énergie à la ligne CA comme un alternateur.
Le rotor sera également avancé par rapport au rotor de l'autre alternateur. Si une charge telle qu'un frein est appliquée à l'une des unités ci-dessus, l'angle du rotor sera en retard sur le champ du stator comme en (3), extrayant l'énergie de la ligne CA, comme un moteur.
Si un couple ou une traînée excessif est appliqué, le rotor dépassera l'angle de couple maximal avance ou retarde tellement que la synchronisation est perdue. Le couple n'est développé que lorsque la synchronisation du moteur est maintenue.
Améliorer la vitesse des moteurs synchrones
Dans le cas d'un petit moteur synchrone à la place de l'alternateur, il n'est pas nécessaire de passer par la procédure de synchronisation élaborée pour les alternateurs. Cependant, le moteur synchrone ne démarre pas automatiquement et doit toujours être amené à la vitesse électrique approximative de l'alternateur avant de se verrouiller (synchroniser) sur le taux de rotation du générateur.
Une fois à vitesse élevée, le moteur synchrone maintiendra le synchronisme avec la source d'alimentation CA et développera le couple.
Sinewave entraîne un moteur synchrone
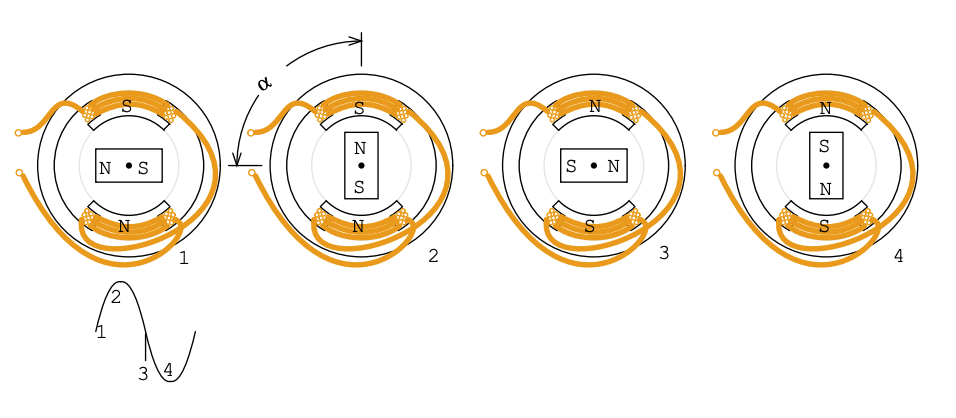
En supposant que le moteur atteint la vitesse synchrone, lorsque l'onde sinusoïdale passe au positif sur la figure ci-dessus (1), la bobine nord inférieure pousse le pôle nord du rotor, tandis que la bobine sud supérieure attire ce pôle nord du rotor. De la même manière, le pôle sud du rotor est repoussé par la bobine sud supérieure et attiré par la bobine nord inférieure.
Au moment où l'onde sinusoïdale atteint un pic en (2), le couple qui maintient le pôle nord du rotor vers le haut est à son maximum. Ce couple diminue à mesure que l'onde sinusoïdale diminue à 0 VDC à (3) avec le couple au minimum.
Lorsque l'onde sinusoïdale devient négative entre (3 et 4), la bobine sud inférieure pousse le pôle sud du rotor, tout en attirant le pôle nord du rotor. De la même manière, le pôle nord du rotor est repoussé par la bobine nord supérieure et attiré par la bobine sud inférieure. En (4), l'onde sinusoïdale atteint un pic négatif avec un couple de maintien à nouveau au maximum. Au fur et à mesure que l'onde sinusoïdale passe du négatif à 0 VDC au positif, le processus se répète pour un nouveau cycle d'onde sinusoïdale.
Notez que la figure ci-dessus illustre la position du rotor pour une condition à vide (α=0°). Dans la pratique, le chargement du rotor entraînera un décalage du rotor par rapport aux positions indiquées par l'angle . Cet angle augmente avec la charge jusqu'à ce que le couple moteur maximum soit atteint à =90°.
La synchronisation et le couple sont perdus au-delà de cet angle. Le courant dans les bobines d'un moteur synchrone monophasé pulse en alternant la polarité.
Si la vitesse du rotor à aimant permanent est proche de la fréquence de cette alternance, il se synchronise sur cette alternance. Comme le champ de la bobine pulse et ne tourne pas, il est nécessaire d'amener le rotor à aimants permanents en vitesse avec un moteur auxiliaire. Il s'agit d'un petit moteur à induction similaire à ceux de la section suivante.
L'ajout de pôles de champ diminue la vitesse
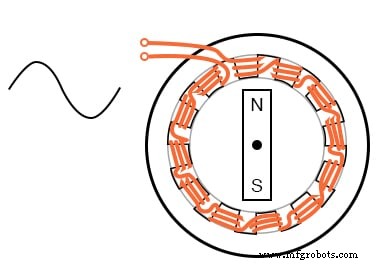
Un alternateur à 2 pôles (paire de pôles N-S) génère une onde sinusoïdale de 60 Hz lorsqu'il est tourné à 3600 tr/min (tours par minute). Les 3600 tr/min correspondent à 60 tours par seconde. Un moteur synchrone à aimant permanent à 2 pôles similaire tournera également à 3600 tr/min.
Un moteur à vitesse inférieure peut être construit en ajoutant plus de paires de pôles. Un moteur à 4 pôles tournerait à 1800 tr/min, un moteur à 12 pôles à 600 tr/min. Le style de construction montré (Figure ci-dessus) est à titre d'illustration. Les moteurs synchrones multipolaires à stator à couple plus élevé et à haut rendement ont en fait plusieurs pôles dans le rotor.

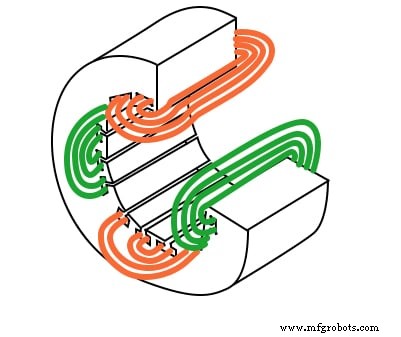
Moteur synchrone 12 pôles à un enroulement
Plutôt que d'enrouler 12 bobines pour un moteur à 12 pôles, enroulez une seule bobine avec douze pièces de pôles en acier interdigitées, comme illustré dans la figure ci-dessus. Bien que la polarité de la bobine change en raison du courant alternatif appliqué, supposez que le haut est temporairement au nord, le bas au sud.
Les pièces polaires acheminent le flux sud du bas et de l'extérieur de la bobine vers le haut. Ces 6 sud sont intercalés avec 6 languettes nord pliées à partir du haut de la pièce polaire en acier de la bobine. Ainsi, une barre de rotor à aimant permanent rencontrera des paires de 6 pôles correspondant à 6 cycles de courant alternatif dans une rotation physique de la barre magnétique.
La vitesse de rotation sera 1/6 de la vitesse électrique de l'AC. La vitesse du rotor sera 1/6 de celle rencontrée avec un moteur synchrone à 2 pôles. Exemple :60 Hz ferait tourner un moteur à 2 pôles à 3 600 tr/min ou à 600 tr/min pour un moteur à 12 pôles.
Réimprimé avec l'autorisation de Westclox History sur www.clockHistory.com
Le stator (figure ci-dessus) montre un moteur d'horloge synchrone Westclox à 12 pôles. La construction est similaire à la figure précédente avec une seule bobine. Le style de construction à une bobine est économique pour les moteurs à faible couple. Ce moteur de 600 tr/min entraîne des réducteurs qui déplacent les aiguilles de l'horloge.
Q : Si le moteur Westclox fonctionnait à 600 tr/min à partir d'une source d'alimentation à 50 Hz, combien de pôles seraient nécessaires ?
R : Un moteur à 10 pôles aurait 5 paires de pôles N-S. Il tournerait à 50/5 =10 rotations par seconde ou 600 tr/min (10 s-1 x 60 s/minute).

Réimprimé avec l'autorisation de Westclox History sur www.clockHistory.com
Le rotor (figure ci-dessus) se compose d'une barre à aimant permanent et d'une coupelle de moteur à induction en acier. La barre du moteur synchrone tournant à l'intérieur des languettes des pôles maintient l'heure exacte. La coupelle du moteur à induction à l'extérieur de la barre magnétique s'adapte à l'extérieur et sur les languettes pour un démarrage automatique. À une époque, des moteurs à démarrage automatique sans la coupelle du moteur à induction étaient fabriqués.
Moteurs synchrones triphasés
Un moteur synchrone triphasé comme illustré dans la figure ci-dessous génère un champ électriquement tournant dans le stator. De tels moteurs ne démarrent pas automatiquement s'ils sont démarrés à partir d'une source d'alimentation à fréquence fixe telle que 50 ou 60 Hz comme dans un environnement industriel.
De plus, le rotor n'est pas un aimant permanent pour les moteurs multi-puissance (multi-kilowatt) utilisés dans l'industrie, mais un électro-aimant. Les gros moteurs synchrones industriels sont plus efficaces que les moteurs à induction. Ils sont utilisés lorsqu'une vitesse constante est requise. Ayant un facteur de puissance en avance, ils peuvent corriger la ligne CA pour un facteur de puissance en retard.
Les trois phases de l'excitation du stator s'additionnent vectoriellement pour produire un seul champ magnétique résultant qui tourne f/2n fois par seconde, où f est la fréquence de la ligne électrique, 50 ou 60 Hz pour les moteurs industriels actionnés par la ligne électrique. Le nombre de pôles est n. Pour la vitesse du rotor en tr/min, multiplier par 60.
S =f120/n où :S =vitesse du rotor en tr/min f =fréquence de ligne AC n =nombre de pôles par phase
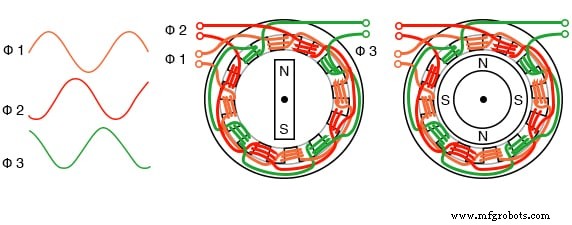
Le moteur synchrone triphasé à 4 pôles (par phase) tournera à 1800 tr/min avec une puissance de 60 Hz ou 1500 tr/min avec une puissance de 50 Hz. Si les bobines sont alimentées une par une dans la séquence φ-1, φ-2, φ-3, le rotor doit pointer vers les pôles correspondants à tour de rôle.
Étant donné que les ondes sinusoïdales se chevauchent réellement, le champ résultant tournera, non pas par étapes, mais en douceur. Par exemple, lorsque les ondes sinusoïdales -1 et -2 coïncident, le champ sera à un pic pointant entre ces pôles. Le rotor magnétique illustré n'est approprié que pour les petits moteurs.
Le rotor à pôles magnétiques multiples (en bas à droite) est utilisé dans tout moteur efficace entraînant une charge importante. Ce seront des électro-aimants alimentés par bague collectrice dans les gros moteurs industriels. Les gros moteurs synchrones industriels sont auto-démarrés par des conducteurs à cage d'écureuil intégrés dans l'armature, agissant comme un moteur à induction.
L'armature électromagnétique n'est excitée qu'une fois que le rotor a atteint une vitesse quasi synchrone.
Moteur synchrone triphasé, 4 pôles
Petits moteurs synchrones multiphasés
Les petits moteurs synchrones multiphasés peuvent être démarrés en augmentant la fréquence d'entraînement de zéro à la fréquence de fonctionnement finale. Les signaux d'entraînement multiphasés sont générés par des circuits électroniques et seront des ondes carrées dans toutes les applications sauf les plus exigeantes.
De tels moteurs sont connus sous le nom de moteurs à courant continu sans balais. Les vrais moteurs synchrones sont entraînés par des formes d'onde sinusoïdales. Un entraînement biphasé ou triphasé peut être utilisé en fournissant le nombre approprié d'enroulements dans le stator. Seul le triphasé est illustré ci-dessus.
Moteur électronique synchrone
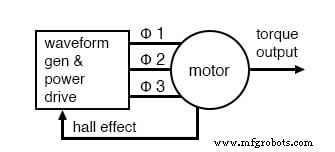
Le schéma synoptique montre l'électronique du variateur associée à un moteur synchrone basse tension (12 V CC). Ces moteurs ont un capteur de position intégré au moteur, qui fournit un signal de bas niveau avec une fréquence proportionnelle à la vitesse de rotation du moteur.
Le capteur de position pourrait être aussi simple que des capteurs de champ magnétique à semi-conducteurs tels que l'effet Hall dispositifs fournissant une synchronisation de commutation (sens du courant d'induit) à l'électronique du variateur. Le capteur de position peut être un capteur angulaire haute résolution tel qu'un résolveur, un inductosyn (codeur magnétique) ou un encodeur optique.
Si la vitesse de rotation constante et précise est requise, (comme pour un lecteur de disque) un tachymètre et boucle à verrouillage de phase peut être inclus (figure ci-dessous). Ce signal de tachymètre, un train d'impulsions proportionnel à la vitesse du moteur, est renvoyé à une boucle à verrouillage de phase, qui compare la fréquence et la phase du tachymètre à une source de fréquence de référence stable telle qu'un oscillateur à cristal.
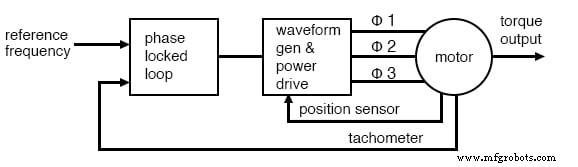
La boucle à verrouillage de phase contrôle la vitesse du moteur synchrone
Moteur CC sans balais
Un moteur entraîné par des ondes carrées de courant, tel que fourni par de simples capteurs à effet Hall, est connu sous le nom de moteur à courant continu sans balai . Ce type de moteur a un couple d'ondulation plus élevé variation à travers une révolution de l'arbre qu'une onde sinusoïdale est entraînée par le moteur. Ce n'est pas un problème pour de nombreuses applications. Cependant, nous nous intéressons principalement aux moteurs synchrones dans cette section.
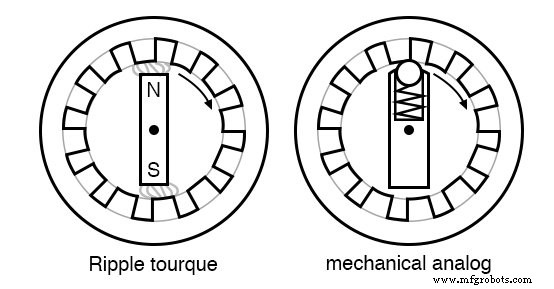
Couple d'ondulation du moteur et analogique mécanique
Le couple d'ondulation, ou cogging, est causé par l'attraction magnétique des pôles du rotor vers les pièces polaires du stator. (Figure ci-dessus) Notez qu'il n'y a pas de bobines de stator. Le rotor PM peut être tourné à la main, mais il sera attiré par les pièces polaires à proximité.
Ceci est analogue à la situation mécanique. Le couple d'ondulation serait-il un problème pour un moteur utilisé dans un lecteur de cassettes ? Oui, nous ne voulons pas que le moteur accélère et ralentisse alternativement lorsqu'il déplace la bande audio devant une tête de lecture de bande. Le couple d'ondulation serait-il un problème pour un moteur de ventilateur ? Non.
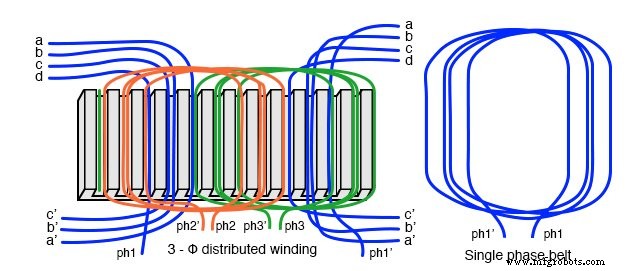
Les enroulements répartis dans une ceinture produisent un champ plus sinusoïdal
Si un moteur est entraîné par des ondes sinusoïdales de courant synchrones avec la force électromotrice arrière du moteur, il est classé comme un moteur à courant alternatif synchrone, que les formes d'onde d'entraînement soient ou non générées par des moyens électroniques. Un moteur synchrone va générer un retour emf sinusoïdal si le champ magnétique du stator a une distribution sinusoïdale.
Il sera plus sinusoïdal si les enroulements des pôles sont répartis dans une ceinture sur de nombreuses fentes au lieu d'être concentrés sur un grand pôle (comme illustré dans la plupart de nos illustrations simplifiées). Cet arrangement annule de nombreuses harmoniques impaires du champ statorique.
Les fentes ayant moins d'enroulements au bord de l'enroulement de phase peuvent partager l'espace avec d'autres phases. Les courroies d'enroulement peuvent prendre une autre forme concentrique, comme illustré dans la figure ci-dessous.
Courroies concentriques
Pour un moteur 2 phases, entraîné par une onde sinusoïdale, le couple est constant tout au long d'un tour par l'identité trigonométrique :
sin2θ + cos2θ =1
La génération et la synchronisation de la forme d'onde d'entraînement nécessitent une indication de la position du rotor plus précise que celle fournie par les capteurs à effet Hall utilisés dans les moteurs à courant continu sans balais. Un résolveur , ou encodeur optique ou magnétique , fournit une résolution de centaines à des milliers de pièces (impulsions) par tour.
Un résolveur fournit des signaux de position angulaire analogiques sous la forme de signaux proportionnels au sinus et au cosinus de l'angle de l'arbre. Les encodeurs fournissent une indication de position angulaire numérique au format série ou parallèle.
Le lecteur d'onde sinusoïdale peut en fait provenir d'un PWM, Pulse Width Modulator , une méthode à haute efficacité d'approximation d'une onde sinusoïdale avec une forme d'onde numérique. Chaque phase nécessite une électronique de commande pour cette forme d'onde déphasée de la quantité appropriée par phase.
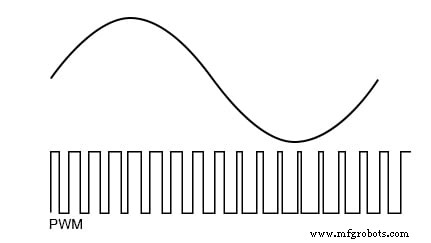
PWM se rapproche d'une onde sinusoïdale
Avantages du moteur synchrone
Le rendement des moteurs synchrones est supérieur à celui des moteurs à induction. Un moteur synchrone peut également être plus petit, surtout si des aimants permanents à haute énergie sont utilisés dans le rotor. L'avènement de l'électronique à semi-conducteurs moderne permet de piloter ces moteurs à vitesse variable.
Les moteurs à induction sont principalement utilisés dans la traction ferroviaire. Cependant, un petit moteur synchrone, qui se monte à l'intérieur d'une roue motrice, le rend attrayant pour de telles applications. Le supraconducteur à haute température version de ce moteur est un cinquième à un tiers du poids d'un moteur enroulé en cuivre.
Le plus gros moteur synchrone supraconducteur expérimental est capable de conduire un navire de classe destroyer naval. Dans toutes ces applications, le variateur électronique de vitesse est indispensable. Le variateur de vitesse doit également réduire la tension d'entraînement à basse vitesse en raison de la diminution de la réactance inductive à une fréquence inférieure.
Pour développer un couple maximal, le rotor doit être en retard de 90° par rapport à la direction du champ du stator. Plus, il perd la synchronisation. Beaucoup moins de résultats dans le couple réduit. Ainsi, la position du rotor doit être connue avec précision. Et la position du rotor par rapport au champ du stator doit être calculée et contrôlée.
Ce type de contrôle est appelé contrôle de phase vectorielle . Il est implémenté avec un microprocesseur rapide pilotant un modulateur de largeur d'impulsion pour les phases du stator. Le stator d'un moteur synchrone est le même que celui du moteur à induction plus populaire.
En conséquence, le contrôle de vitesse électronique de qualité industrielle utilisé avec les moteurs à induction est également applicable aux gros moteurs synchrones industriels. Si le rotor et le stator d'un moteur synchrone rotatif conventionnel sont déroulés, un moteur linéaire synchrone en résulte.
Ce type de moteur est appliqué à un positionnement linéaire précis à grande vitesse.
FEUILLE DE TRAVAIL CONNEXE :
- Fiche de travail sur la théorie des moteurs à courant alternatif
Technologie industrielle
- Moteurs à induction monophasés
- Moteurs à collecteur AC
- Comment dépanner les moteurs à rotor bobiné
- Conseil sur les moteurs électriques :Minimisez vos démarrages
- Conseil technique :Moteurs
- Avantages des moteurs refroidis par liquide
- 7 étapes pour assurer une meilleure maintenance des moteurs électriques
- Moteurs électriques à courant continu et à courant alternatif :quelles sont leurs différences ?
- Moteurs BLDC et automatisation