


Le robot-étoile de mer du MIT CSAIL permet une étude plus approfondie de la vie aquatique
Les scientifiques ont inventé une "étoile de mer robotisée" qui nous donne un meilleur aperçu de la vie aquatique, comme le rapporte Adam Conner-Simons, ou MIT CSAIL. (Voir la vidéo ci-dessous.)
Les biologistes connaissent depuis longtemps les défis de la documentation de la vie océanique, de nombreuses espèces de poissons se révélant assez sensibles aux mouvements sous-marins des humains.
Comme solution possible, les informaticiens ont développé des robots marins spéciaux qui peuvent se déplacer furtivement parmi leurs homologues à base de carbone. En 2018, par exemple, une équipe du laboratoire d'informatique et d'intelligence artificielle du MIT (CSAIL) a fabriqué un poisson robotique mou qui nageait de manière autonome avec de vrais poissons le long des récifs coralliens des Fidji.
Cependant, la dynamique complexe de la façon dont l'eau se déplace - et sa capacité à ruiner rapidement certains systèmes électroniques parfaitement bons - a rendu les robots sous-marins particulièrement difficiles à développer par rapport à ceux pour l'air ou la terre.
Avec le poisson, l'équipe CSAIL a dû passer par des mois d'essais et d'erreurs pour ajuster manuellement la conception afin qu'elle puisse réellement fonctionner de manière fiable dans l'eau.
Alors que ce robot était particulièrement complexe, un groupe dirigé par les professeurs du MIT Wojciech Matusik et Daniela Rus estimait toujours qu'il était possible d'accélérer le processus de production. Dans cet esprit, ils ont maintenant créé un nouvel outil pour simuler et fabriquer un robot souple fonctionnel en quelques heures.
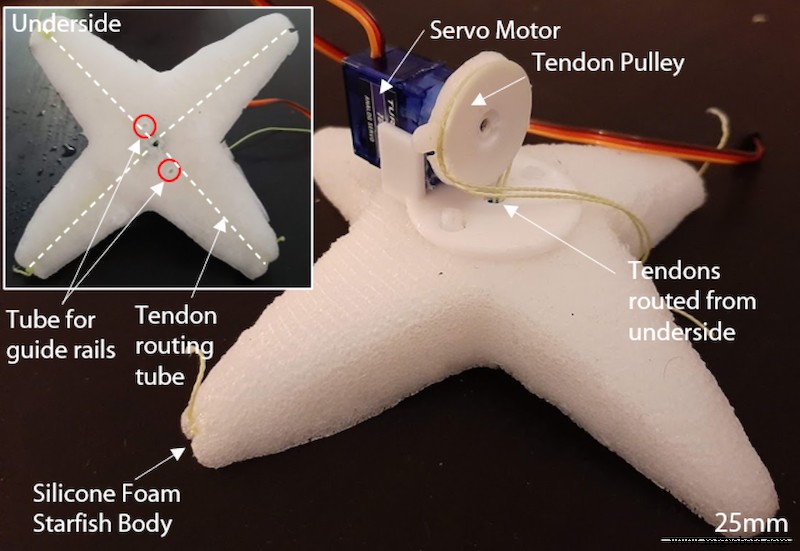
L'équipe a utilisé son système pour créer une étoile de mer robotique molle en mousse de silicone et capable de se déplacer avec un seul actionneur de faible puissance. L'étoile de mer se déplace via les tendons de ses quatre pattes, qui sont reliées à un servomoteur utilisé pour fléchir et détendre les pattes.
Le post-doctorant CSAIL Josephine Hughes, co-auteur principal d'un nouvel article aux côtés du doctorant Tao Du sur l'étoile de mer, déclare:"Les interactions passives entre un robot sous-marin et les forces fluides qui l'entourent - qu'il s'agisse d'un courant calme ou d'une vague ondulante - sont beaucoup plus compliqué que lorsqu'un robot marche sur un terrain stable, ce qui rend la création de ses systèmes de contrôle assez difficile.
"Mais en utilisant ce simulateur, un processus qui prendrait normalement des jours ou des semaines peut se dérouler en quelques heures seulement."
Du dit que l'équipe a choisi une conception d'étoile de mer en raison de la simplicité et de l'élégance de son mouvement, avec la compression et la libération de ses jambes créant un mouvement vers l'avant.
Cependant, l'équipe a constaté que le simulateur fonctionne pour une gamme de types de corps, et donc ils exploreront ensuite des conceptions inspirées des tortues de mer, des raies manta et des requins qui impliquent des structures plus complexes telles que des articulations, des nageoires et des nageoires.
L'outil du groupe consiste en un modèle d'apprentissage automatique effectuant une simulation initiale et la conception des mécanismes de contrôle du robot, qui est ensuite rapidement fabriqué.
Des expériences réelles avec le robot sont ensuite utilisées pour acquérir plus de données afin d'améliorer et d'optimiser à plusieurs reprises sa conception. Le résultat est que le robot n'a généralement qu'à être reconstruit une fois de plus. (Un document séparé sur le développement de l'outil de simulation est actuellement en cours de révision.)
"Lorsque nous faisons de la simulation robotique, nous devons faire des approximations qui, par définition, créent un écart entre la simulation et la réalité", explique Cecilia Laschi, professeur de contrôle et de mécatronique à l'Université nationale de Singapour qui n'a pas participé à la recherche.
"Ce travail vise à réduire cet écart de réalité, avec une boucle mixte d'expériences simulées et réelles qui est assez efficace."
Pour le corps de l'étoile de mer, l'équipe a utilisé de la mousse de silicone en raison de ses propriétés élastiques, de sa flottabilité naturelle et de sa capacité à être fabriquée rapidement et facilement. Au cours d'expériences, les chercheurs ont découvert que l'étoile de mer pouvait se déplacer dans l'eau quatre fois plus rapidement qu'avec un contrôleur fabriqué à la main. par un expert humain.
En effet, Hughes dit que l'équipe a découvert que le simulateur semble utiliser des stratégies de contrôle auxquelles les humains n'auraient pas pensé eux-mêmes.
"Avec l'étoile de mer robotisée, nous avons appris qu'en plus de ces propulsions de jambes assez visibles, il existe des mouvements à haute fréquence plus subtils qui peuvent leur donner un élan important", explique Hughes.
Le projet s'appuie sur une série de projets CSAIL axés sur les robots mous, qui, selon Rus, ont le potentiel d'être plus sûrs, plus robustes et plus agiles que leurs homologues à corps rigide.
Les chercheurs se tournent de plus en plus vers les robots souples pour les environnements qui nécessitent de se déplacer dans des espaces restreints, car ces robots sont plus résistants pour se remettre des collisions.
Laschi dit que l'outil de l'équipe pourrait être utilisé pour développer des robots pour mesurer des données à différents endroits dans l'océan profond, et pour envisager généralement des robots qui peuvent se déplacer de nouvelles façons auxquelles les chercheurs n'ont pas encore pensé.
"Les robots bio-inspirés comme le robot étoile de mer et SoFi peuvent se rapprocher de la vie marine sans la déranger", explique Rus. "À l'avenir, en concevant et en construisant rapidement des instruments robotiques bio-inspirés, il sera possible de créer des observatoires personnalisés qui pourront être déployés dans la nature pour observer la vie."
Du et Hughes ont co-écrit l'article avec Matusik, Rus et le premier cycle du MIT, Sébastien Wah. L'article a été publié cette semaine dans le Journal of Robotics Automation Letters et sera également présenté virtuellement le mois prochain à la Conférence internationale de l'IEEE sur la robotique douce (RoboSoft).
Système de contrôle d'automatisation
- Sepro présente son premier robot « made in America »
- Robots chez NPE :plus rapides, plus puissants, plus intelligents
- Garder les robots occupés
- Moulage par injection :robots et cobots plus rapides
- Les fabricants de robots et de cobots s'associent
- Gamme de robots polyvalents à 5 axes repensée
- Omron lance un nouveau robot SCARA
- Nachi-Fujikoshi élargit sa gamme de séries de robots compacts
- 5 choses à considérer avant d'acheter un robot