


L'avenir de la robotique
L'avenir de la robotique est distribué. Tout robot complexe est un ensemble distribué de modules et de systèmes, certains autonomes, certains semi-autonomes et certains contrôlés par l'homme, tous fonctionnant étroitement ensemble pour former un seul système cohérent de pièces interopérables. En télérobotique, nous cherchons à permettre la téléopération d'un robot et à donner à l'opérateur un sentiment humain d'être là où le robot est déployé, en fournissant une vidéo et des forces d'interactions aux opérateurs humains.
Pour l'ESA, cela signifie dans l'espace ou sur la surface d'une planète hostile. L'opérateur humain peut être sur une station spatiale ou même de retour sur terre !
Pour ce faire, nous activons la téléprésence grâce à une combinaison de retour de force haptique pour l'opérateur combiné à une vidéo de réalité augmentée.
Fournir à l'utilisateur un retour visuel et tactile permet la téléprésence. Plus le retour d'informations est réaliste et informatif, plus la perception de la téléprésence de l'opérateur est grande, ce qui conduit à un meilleur fonctionnement du robot à distance.
Le défi critique de la téléopération spatiale pour l'ESA est le lien de communication. Il existe de nombreuses boucles de contrôle en temps réel dans les robots, mais celle entre l'humain et le robot distant dans un système de téléopération est la plus problématique. Plusieurs boucles de contrôle s'exécutent sur une liaison réseau à commutation de paquets qui présente le pire des comportements de communication. Il peut se déconnecter à tout moment, la latence peut souvent être mesurée en secondes et varie énormément, et la perte de paquets est un phénomène régulier; c'est tout aussi vrai pour la communication via Internet qu'à travers l'espace. Pourtant, nous devons envoyer toute la vidéo sur ce lien, le temps étant corrélé à l'état de contrôle du robot et aux commandes de contrôle aux deux extrémités. Cela signifie que l'état de la liaison doit devenir une partie intégrante de la boucle de contrôle, avec suffisamment d'informations disponibles aux deux extrémités pour que l'opérateur réagisse de manière appropriée et pour que le robot distant se maintienne dans un état sûr et stable. L'état du lien doit devenir une partie intégrante de l'état du système.
L'équipe de développement de l'ESA est composée d'ingénieurs mécatroniques, de spécialistes de la vision par ordinateur, de théoriciens des systèmes de contrôle et de quelques ingénieurs logiciels. Il nous était clair dès le début que nous devions rechercher une méthode commune pour discuter des besoins et des interfaces du système, en particulier lorsqu'on nous demandait de fournir des systèmes distribués complexes impliquant plusieurs ordinateurs, diverses plates-formes matérielles et logicielles sur lesquelles fonctionner ; nous nous sommes installés sur les données. Nous considérons les données comme un moyen de comprendre l'état du système, comme un moyen de représenter les images vidéo et comme un moyen de représenter la théorie du contrôle. Il était donc logique d'aborder notre environnement de développement et le développement du système de manière centrée sur les données. Couplé au besoin critique de comprendre l'état des liens dans le cadre de la téléopération, nous avons été inexorablement conduits à évaluer le DDS (Data Distribution Service). La NASA était déjà un gros utilisateur de DDS dans ses systèmes de communication spatiale - mais DDS pourrait-il également permettre la téléopération sur une liaison aussi difficile, permettant un contrôle en temps réel sur ce qui est en effet la plus difficile des connexions ? C'est un nouveau territoire scientifique inexploré, et d'autant plus passionnant à cause de cela. Les premières indications sont extrêmement encourageantes.
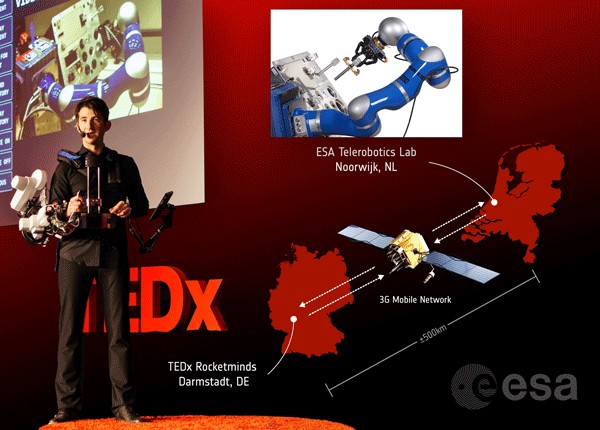
Dans cette démonstration en direct au TEDx RheinMain RocketMinds, mai 2014, j'ai utilisé notre prototype de bras exo-squelette EXO-1 pour contrôler à distance un bras de robot qui était physiquement situé dans notre ESA Telerobotics &Laboratoire d'haptique à plus de 500 km. Ma tâche consistait à ramasser une épingle en métal et à la placer dans un trou avec une tolérance d'écart de moins de 0,5 mm. L'ensemble de la démonstration a été exécuté sur une connexion WAN téléphonique 2G basée sur Internet, car la connexion 3G prévue était indisponible de manière inattendue ! Dans la pièce fermée, remplie de personnes avec des téléphones dans leurs poches, la bande passante était sévèrement limitée et présentait en fait le type de connexion expérimenté dans l'espace - ou en fait bien pire. Cela ne peut pas vraiment être pire que cela, en téléopérant sur un lien qui présentait des retards de l'ordre de 15 secondes avec une perte de données importante. Pourtant, DDS fonctionnant sur le lien 2G a réussi à gérer toute la communication pour le retour haptique, la boucle de contrôle du bras du robot et la vidéo du bras du robot dans le laboratoire (diffusée à la fois sur une tablette sur mon bras et clonée localement pour l'affichage sur le écran principal TEDx).
Ce n'est peut-être pas encore dans l'espace, mais le contrôle télérobotique de précision sur de grandes distances et les liaisons de données difficiles avec vision et retour haptique sont littéralement à notre portée et nous l'avons démontré à un large public .
MISE À JOUR :L'expérience Haptics-1 a été menée à bord de la Station spatiale internationale par l'astronaute de la NASA Barry Wilmore. Un premier pré-test a été réalisé le 30.12.2014. Haptics-1 est la toute première expérience robotique de retour de force dans l'espace. Toutes nos félicitations! en savoir plus
La première fois que le feedback #haptique est utilisé dans l'espace, jamais ! Aujourd'hui, @Space_Station#haptics-1 se déroule avec succès ! pic.twitter.com/30zD5GzGqs
— ESATelerobotics (@ESATelerobotics) 30 décembre 2014
Si vous avez une histoire sur l'utilisation de Connext DDS que vous aimeriez partager, envoyez-nous un e-mail à [email protected].
Technologie de l'Internet des objets
- L'avenir de la télévision en direct
- Le futur est… l'industrie 4.0
- Edge computing :L'architecture du futur
- Visualiser l'avenir de la maintenance des usines
- La robotique et l'avenir de la production et du travail
- L'avenir des centres de données
- L'avenir de la technologie logistique :un siècle chinois ?
- L'histoire de la robotique dans la fabrication
- AutoStore :Ouvrir l'avenir de l'entreposage autonome