


Bras robotique à partir de matériaux recyclés
Composants et fournitures
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 |
Applications et services en ligne
 |
| |||
 |
|
À propos de ce projet
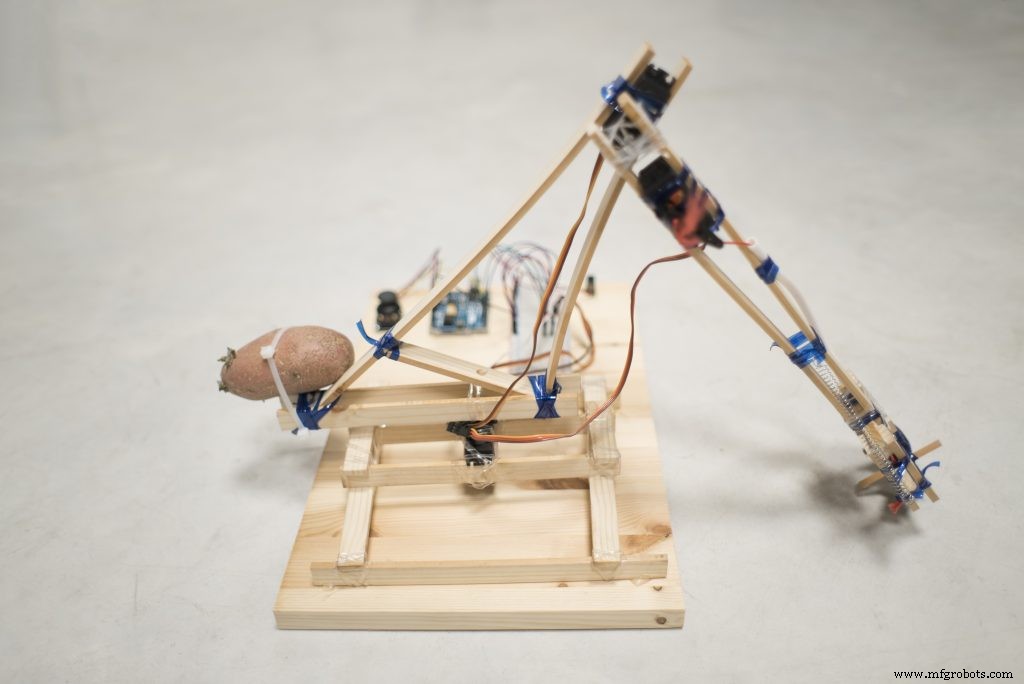
Les bras de robot sont l'un des projets de bricolage les plus populaires que vous trouverez en ligne. Lorsque nous nous sommes assis pour concevoir notre version d'un bras de robot Arduino, nous avons décidé de relever un défi et de le créer à partir de matériaux recyclés. De notre point de vue, être maker, c'est aussi sortir des sentiers battus et se demander comment utiliser les différents matériaux qui s'offrent à vous, sans produire plus de déchets. À l'aide de morceaux de bois et de bouteilles en plastique, nous avons assemblé le corps du bras du robot. Nous avons fabriqué des thermorétractables à partir de bouteilles en plastique avec une technique soignée que nous avons apprise en ligne, et avons utilisé une pomme de terre (!) Comme poids afin que le robot ne bascule pas.
Ce projet était très amusant pour nous, car il nous a rappelé pourquoi nous aimons faire tellement.
Vous pouvez également trouver le tutoriel complet de ce projet et d'autres sur notre blog.
Remarque :Dans le video vous verrez une version antérieure de circuito.io, il est donc préférable de suivre les étapes du didacticiel.
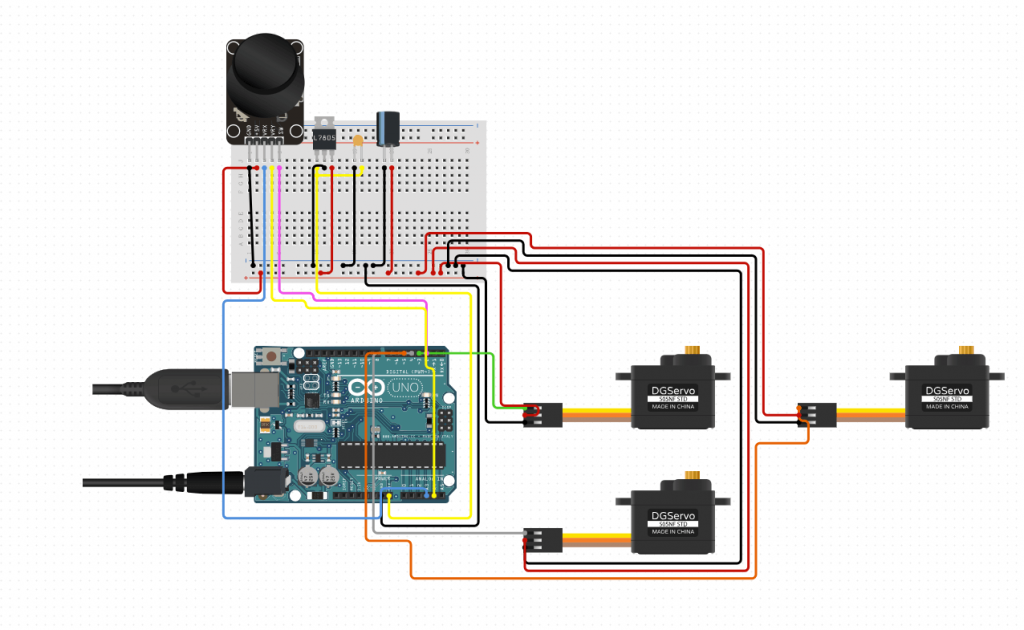
Electronique
Composants principaux
- Arduino UNO
- 3 Servos SparkFun (Generic Metal Gear)
- Module 2 axes Joystick PS2
Composants secondaires
- Régulateur de tension 5v
- Condensateur électrolytique - 1uF/50V
- Condensateur Céramique 100nF
- Dissipateur de chaleur TO-220
- Planche à Pain - Demi-Taille
- Pack Fils de Cavalier - M/M
Cliquez ici pour voir le schéma de câblage
Code bras robot
- Vous devez d'abord télécharger le code du circuit depuis l'onglet code sur circuito.io.
- Suivez les étapes pour vérifier que vous l'avez correctement câblé
- Remplacez le code de test firmware.ino de circuito.io par le code firmware.ino dans le référentiel. Laissez les autres bibliothèques telles quelles.
- Assurez-vous de laisser « Inclure les bibliothèques » et « Définitions d'épingles ». Vérifiez que les définitions d'épingles correspondent.
Matériaux

- Nous avons utilisé des chutes de bois de 1 cm d'épaisseur que nous avions dans notre atelier. À certains endroits, nous avons collé 2 pièces ensemble pour plus de solidité et de robustesse. Vous pouvez vérifier les autres matériaux que vous avez autour de vous, mais assurez-vous qu'il est solide mais flexible.
- Pour attacher les pièces ensemble, nous avons fabriqué des thermorétractables à partir de bouteilles en plastique. C'est une technique géniale que vous pouvez faire avec des bouteilles en plastique que vous avez à la maison. Jouez et testez-les un peu, vous serez surpris de leur force.
- Le bras se déplace sur 3 axes, nous allons donc utiliser 3 servomoteurs. Voici un bon article qui explique comment choisir un servomoteur pour votre projet. Nous allons utiliser le Sparkfun Servo - engrenage métallique générique.
Assemblage
Le socle
Commencez la construction avec une base solide afin que le bras ne bascule pas. Dans le même temps, nous devons également comprendre quelle serait la meilleure façon de lier et d'attacher les morceaux de bois ensemble afin que la base soit solide.
Dans l'image ci-dessous, vous pouvez voir la façon dont nous avons utilisé les thermorétractables et une pomme de terre (!) Comme base comme poids. N'oubliez pas de le remplacer de temps en temps :)
Solde
Placer le deuxième servo était plus délicat et nous pensons que cette zone a encore besoin d'un peu d'attention. Nous nous sommes rendu compte, après avoir construit le prototype, que nous n'avions pas suffisamment réfléchi à l'équilibrage du bras. Par conséquent, le servomoteur consomme beaucoup de courant - quelque chose qui peut être surmonté en utilisant un contrepoids sur le côté opposé du bras.
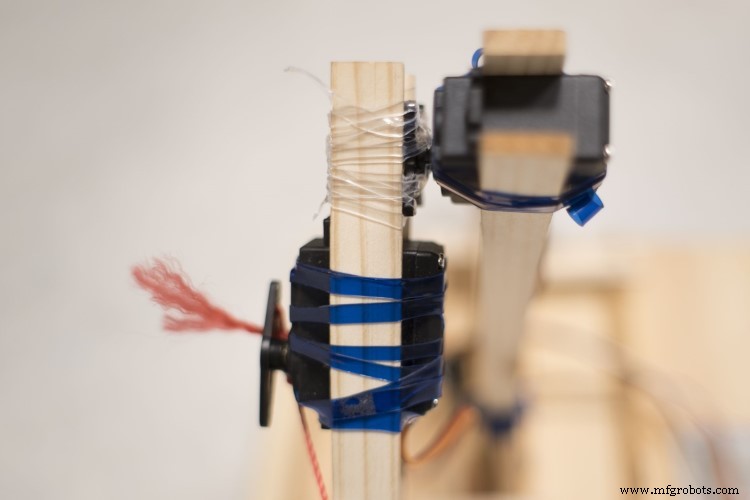
La pince
Nous avons envisagé différents types de pinces, et nous n'étions pas vraiment sûrs de ce que nous allions faire ici. Finalement, nous avons décidé de rendre un côté de la pince statique afin qu'il ait une forte adhérence. Comme vous pouvez le voir dans l'image ci-dessous, pour la partie mobile, nous avons fait un joint, qui est contrôlé par le servo et ajouté un ressort pour la fermeture et l'ouverture.
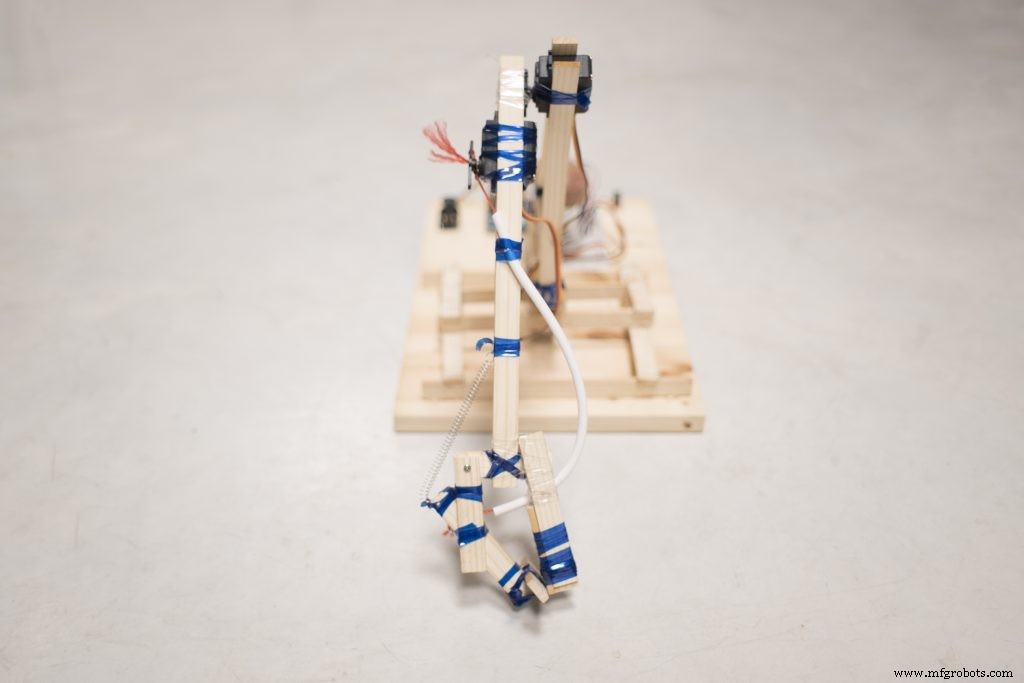
Finalement, nous avons placé de la ficelle à l'intérieur d'un tube élastique pour relier le servomoteur et la pince, le même mécanisme que vous pouvez trouver dans les freins de vélo.
C'est en gros ça ! Vous devrez probablement apporter des modifications mineures au code et à la mécanique en fonction du matériel et de l'électronique que vous utilisez. Si vous avez des idées ou des commentaires, nous aimerions les entendre! Partagez-les avec nous sur notre forum ou dans les commentaires ci-dessous
Code
Code du bras robotique
1. Remplacez le code de test firmware.ino de circuito.io par le code firmware.ino dans ce référentiel2. Laissez les autres bibliothèques telles quelles.3. Assurez-vous de laisser « Inclure les bibliothèques » et « Définitions d'épingles »4. Vérifiez que les définitions des broches correspondent à https://github.com/Circuito-io/Robotic-ArmProcessus de fabrication
- Le bras robotique imprimé en 3D Open Source de Haddington Dynamics
- Robot SCARA à double bras
- Différences entre le robot manipulateur et le robot bras
- Bras de robot MeArm - Votre robot - V1.0
- Bras robotique Arduino imprimé en 3D
- Bras robotique contrôlé par Nunchuk (avec Arduino)
- Arme de robot contrôlée via Ethernet
- GXO pilote un bras robotique personnalisé pour la logistique du e-commerce de mode
- Le bras robotique industriel - Un boom de la fabrication