


Bras de robot MeArm - Votre robot - V1.0
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
À propos de ce projet
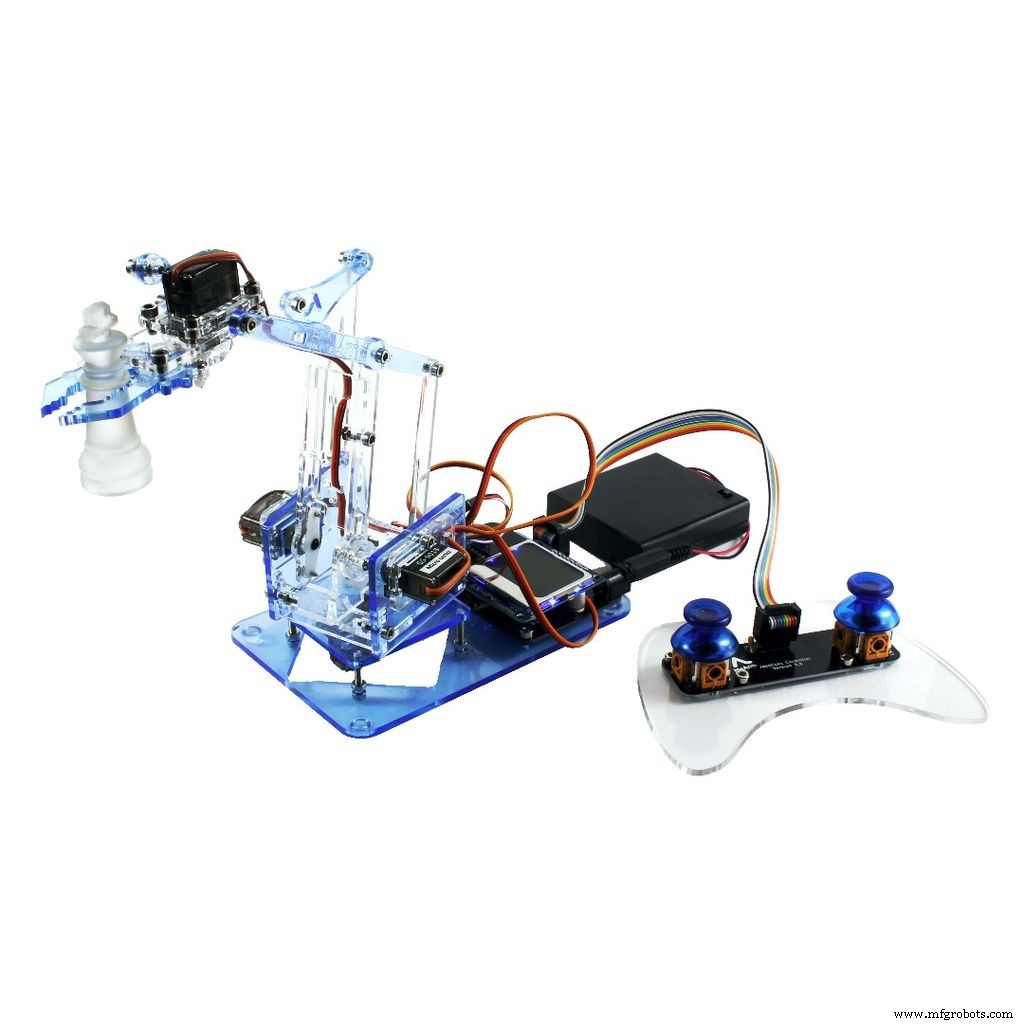
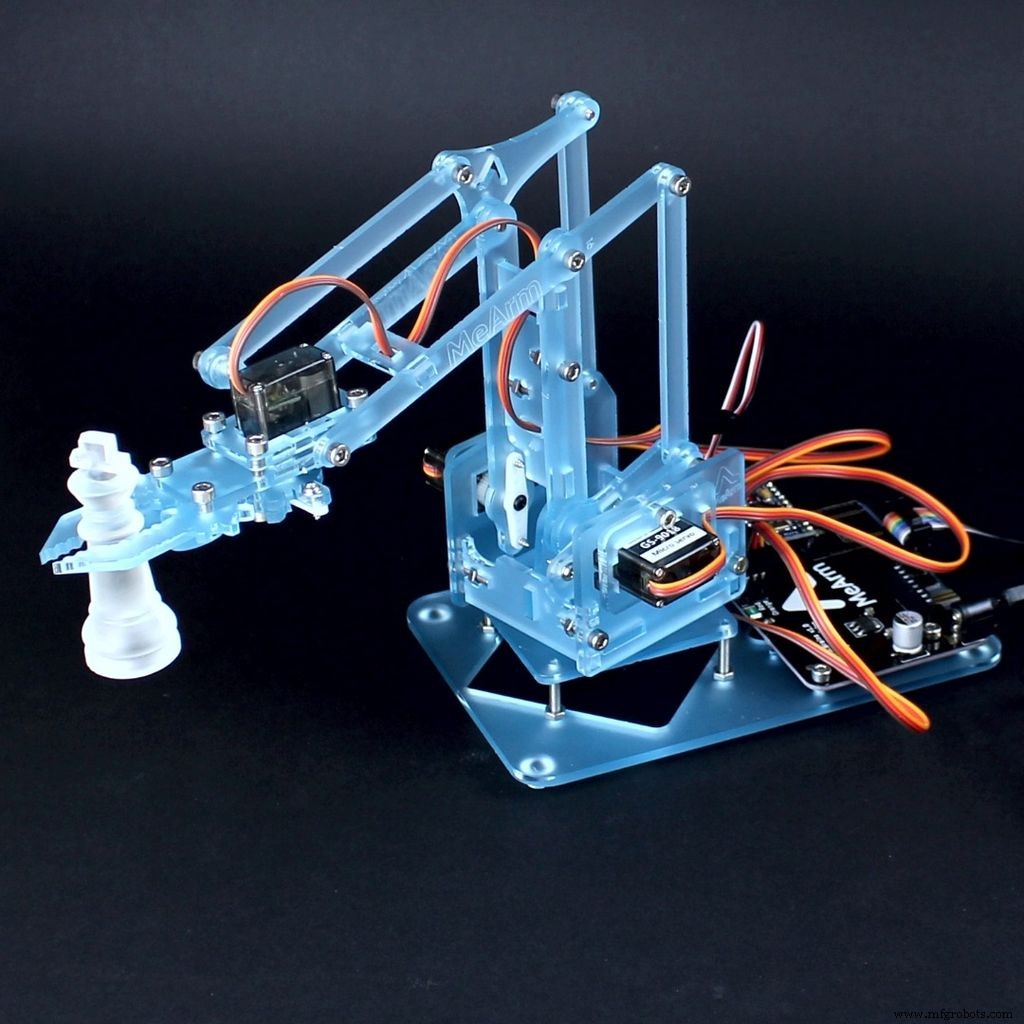
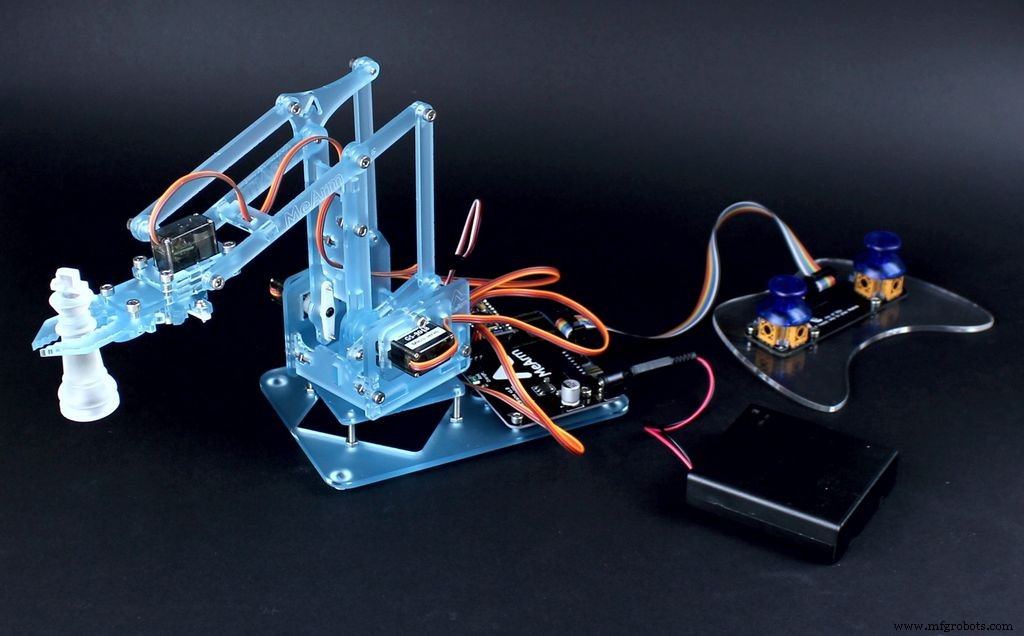
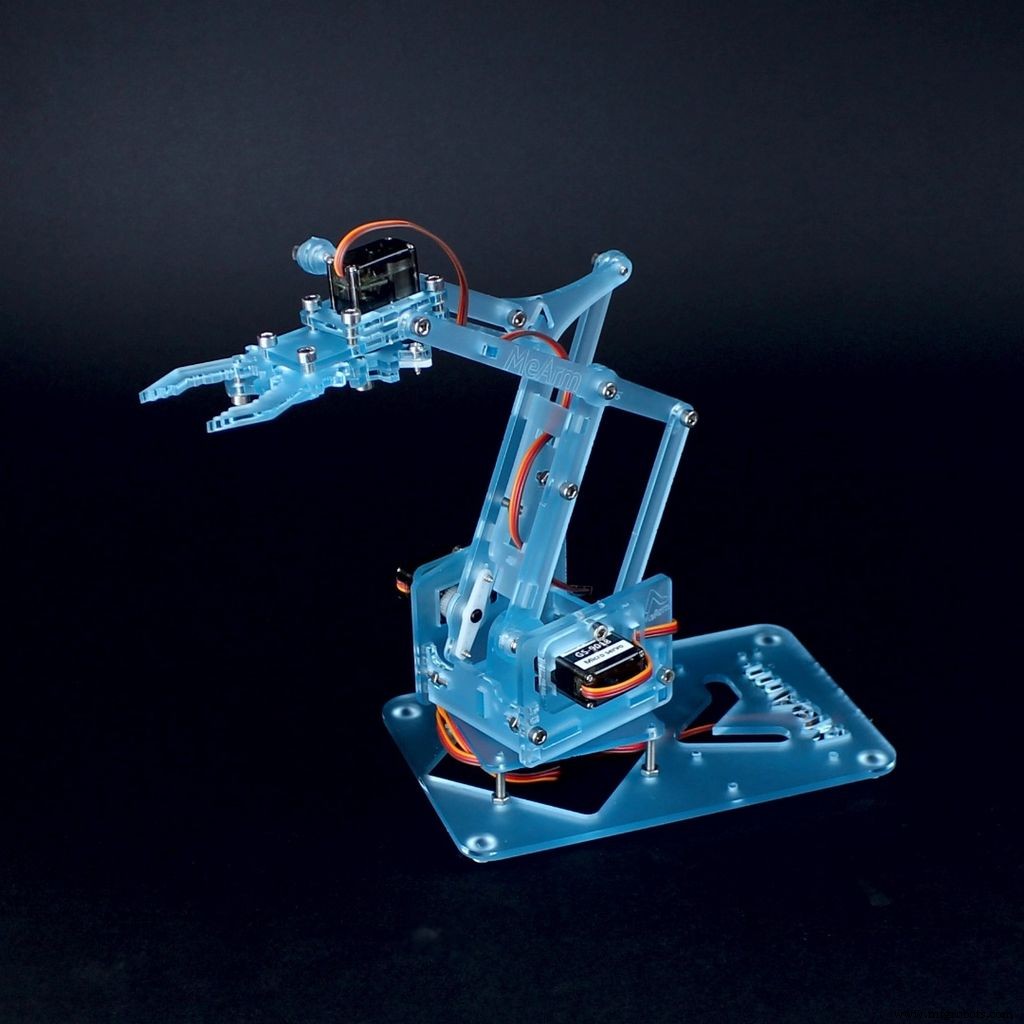
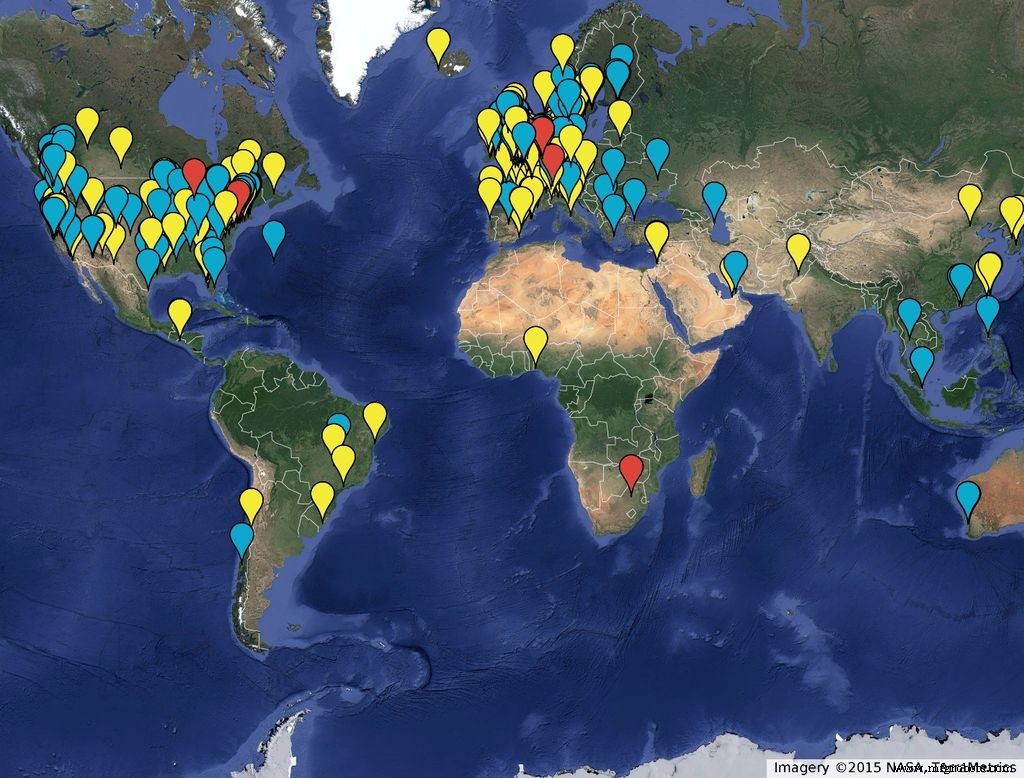
Il s'agit de la toute dernière version des instructions de construction du bras robotique MeArm. Le MeArm est arrivé pour la première fois sur instructables en avril 2014 lorsque nous avons remporté un deuxième prix au concours de robots. Depuis lors, nous en avons vu environ 10 000 construits dans le monde entier ! Seule une poignée est indiquée sur notre carte, mais nous sommes vraiment fiers qu'avec l'aide d'instructables, nous soyons devenus le premier robot viral au monde !
Nous avons rassemblé ces instructions pour compléter celles de notre page de ressources.
Étape 1 : Prenez vos fichiers, lancez vos lazors !
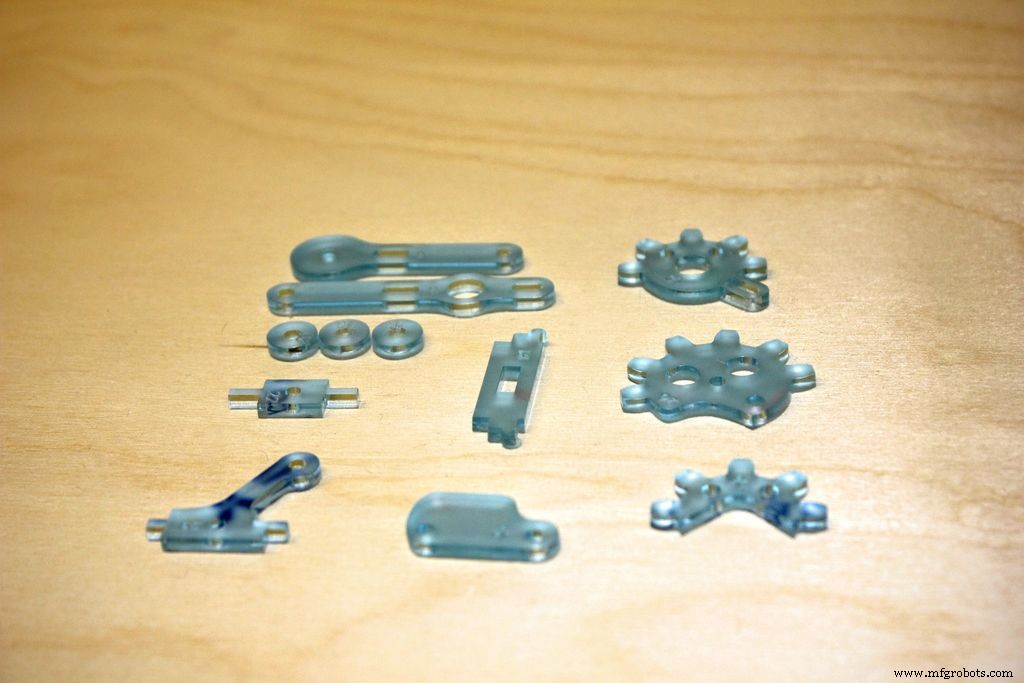
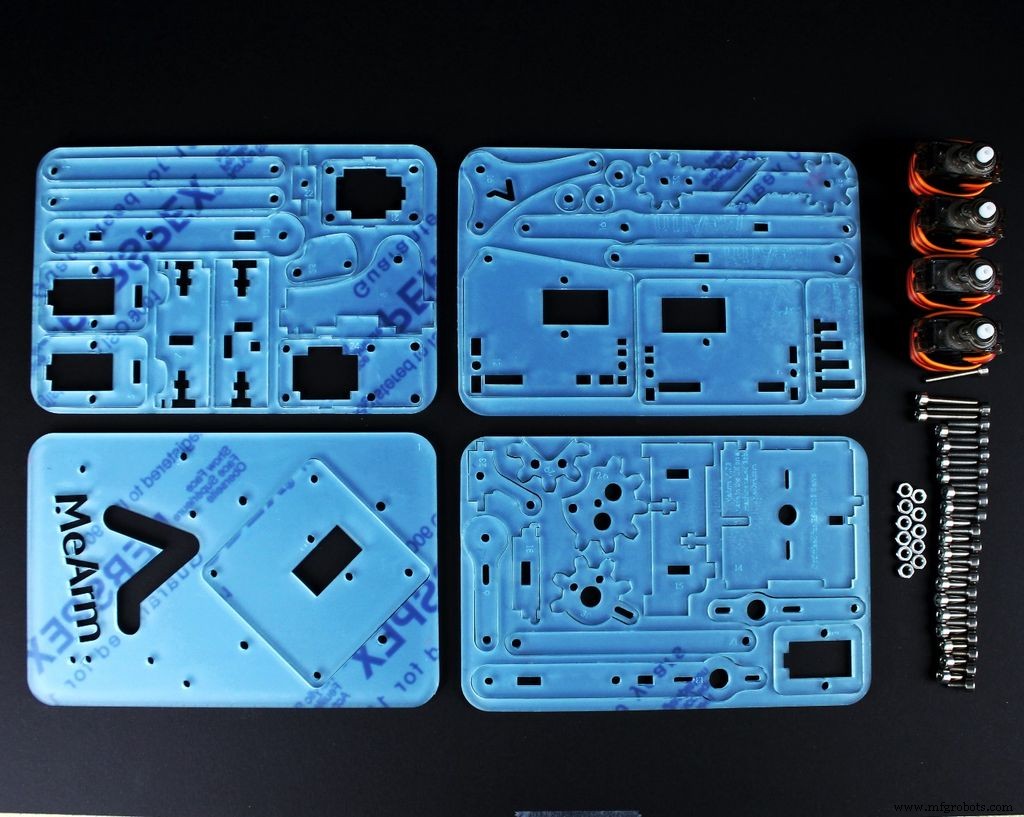
Le MeArm est toujours et a presque toujours été du matériel open source. Vous pouvez donc récupérer nos fichiers sur thingiverse. C'est un fichier .dxf, il devrait donc fonctionner sur la plupart des découpeurs laser et nous avons mis une boîte autour des pièces afin que vous puissiez le régler à la bonne taille. Nous utilisons de l'acrylique de 3 mm, mais le design est assez tolérant et nous l'avons vu fabriqué en bois et même imprimé en 3D.
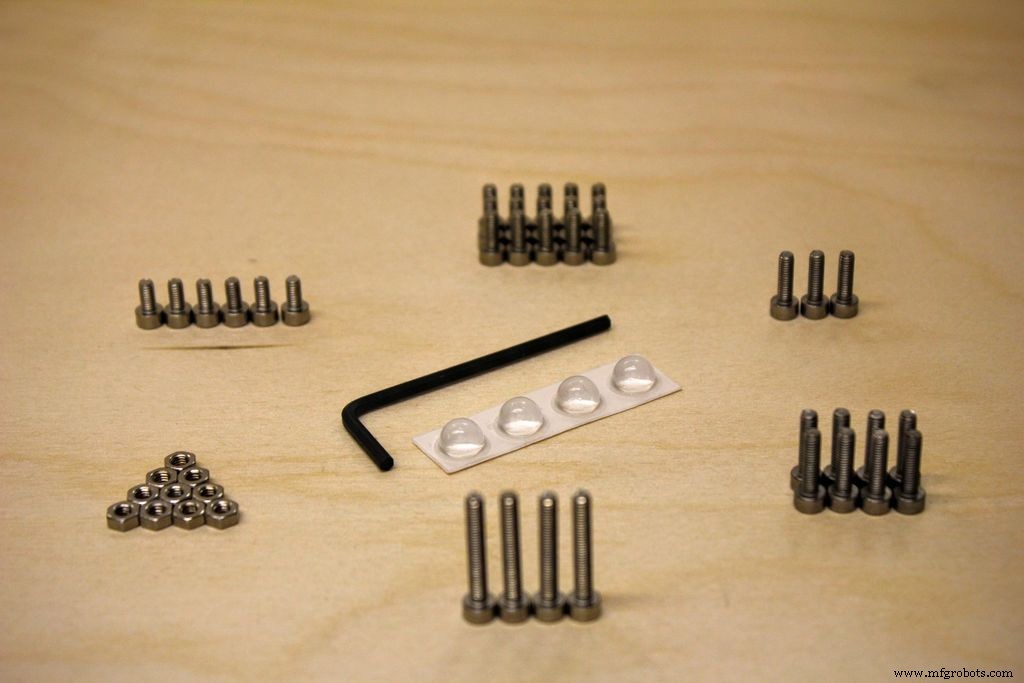
Vous aurez également besoin d'un tas de vis. Le chargement actuel nécessite :
Écrou x 11
6 mm x 7
8 mm x 15
10 mm x 5
12 mm x 8
20 mm x 4
Toutes les tailles M3, c'est-à-dire métrique 3 mm. Ce que je comprends peut être difficile à trouver aux États-Unis, mais allez, vous avez atteint la lune, vous pouvez trouver une alternative appropriée !
Étape 2 :Tenez bon ! Calibrons !
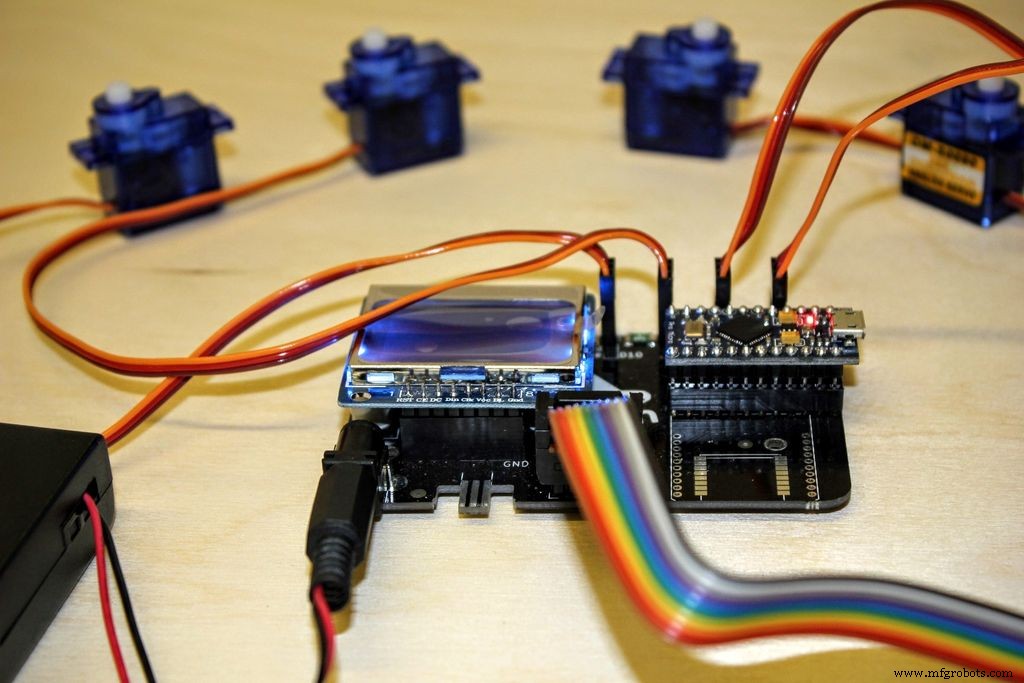

Si vous avez découpé au laser vos pièces ou acheté l'un de nos kits, vous voudrez vraiment le faire construire. Mais vous devez d'abord accomplir une étape vitale. Nous devons calibrer les servos. Ici, nous utiliserons notre Brains Board, qui est compatible Arduino, mais vous pouvez utiliser tout ce qui générera un signal PWM pour les calibrer. Un code MeArm est disponible pour Arduino, Raspberry Pi, Beaglebone Black, Sparkcore et Espruino.
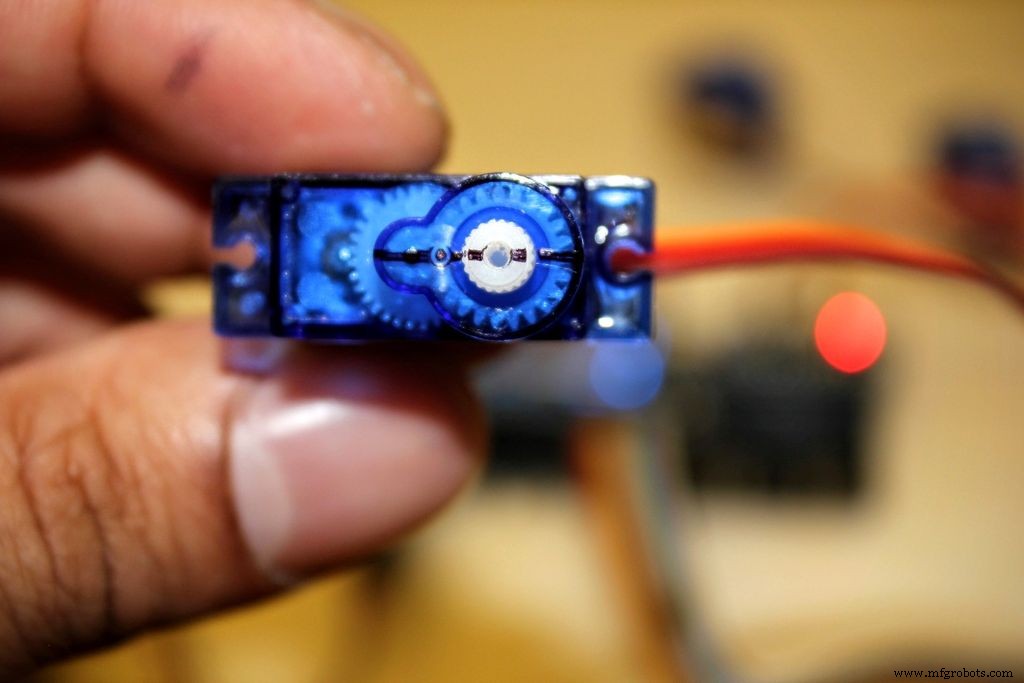
En utilisant notre Brains Board, il sera programmé pour aller aux positions par défaut. Qui sont 90, 90, 90 et 25 pour les servos pour le centre, la gauche, la droite et la griffe respectivement. Marquez une ligne médiane sur la broche et le corps du servo et vous pouvez également les marquer c, l, r et c ou par un autre système qui signifiera quelque chose pour vous.
Ne soyez pas tenté de les faire tourner à la main, le couple fourni par votre force puissante pourrait endommager les engrenages des servos. Pour la même raison, il est très important que vous effectuiez ce processus avant de construire votre MeArm.
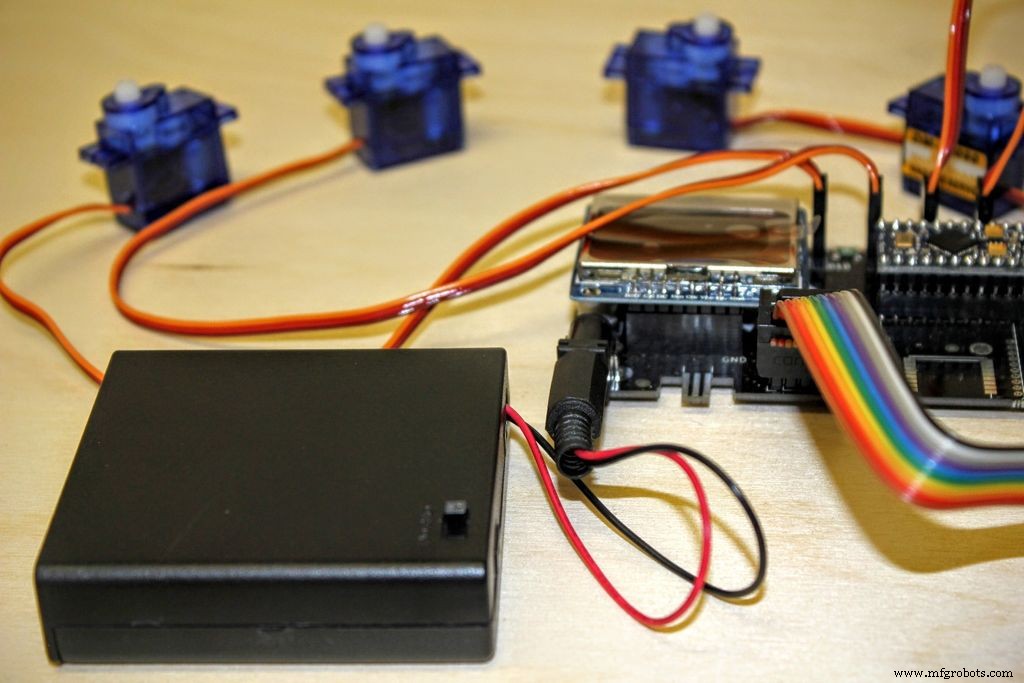
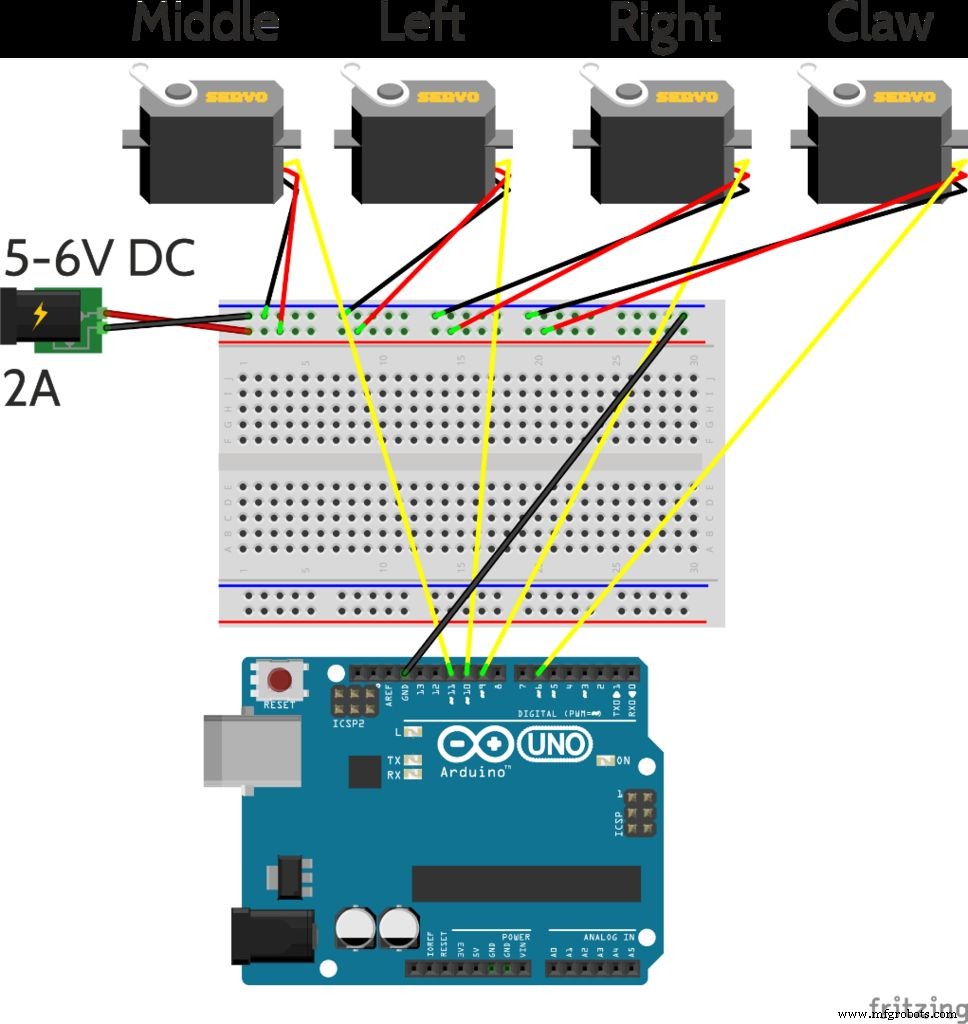
Si vous utilisez et Arduino, la configuration indiquée dans l'image ci-dessus et ce code vous donneront le même résultat. Nous utilisons Codebender pour notre code de démonstration et aimerions un t-shirt. Veuillez donc utiliser ce lien si vous envisagez d'ouvrir un compte.
La partie la plus importante à réaliser lors de la configuration de vos servos est que vous ne pouvez pas les alimenter via votre microcontrôleur. Vous avez besoin d'une alimentation séparée 5-6V 2A, avec une masse commune au microcontrôleur. Consultez l'image de configuration Arduino pour plus d'informations.
Étape 3 : Allons-y !
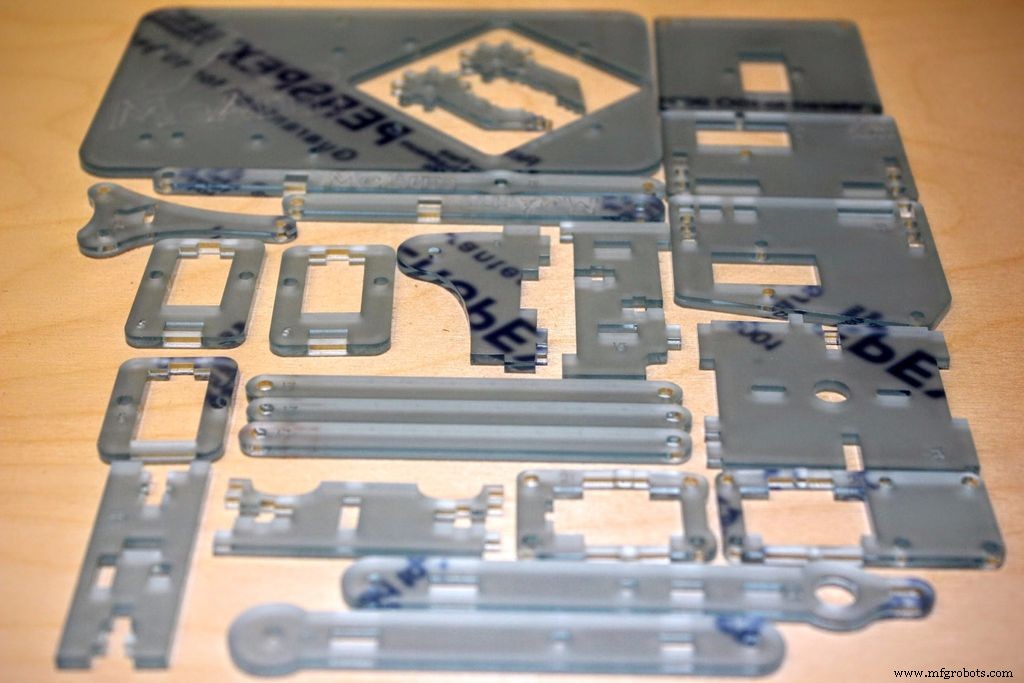
Avec vos servos calibrés, nous pouvons craquer. Littéralement si vous avez l'un de nos packs snap out !
Vous devrez probablement passer un certain temps à retirer le support protecteur des pièces en acrylique. Vous pouvez le faire au fur et à mesure ou tout d'un coup. Votre appel.
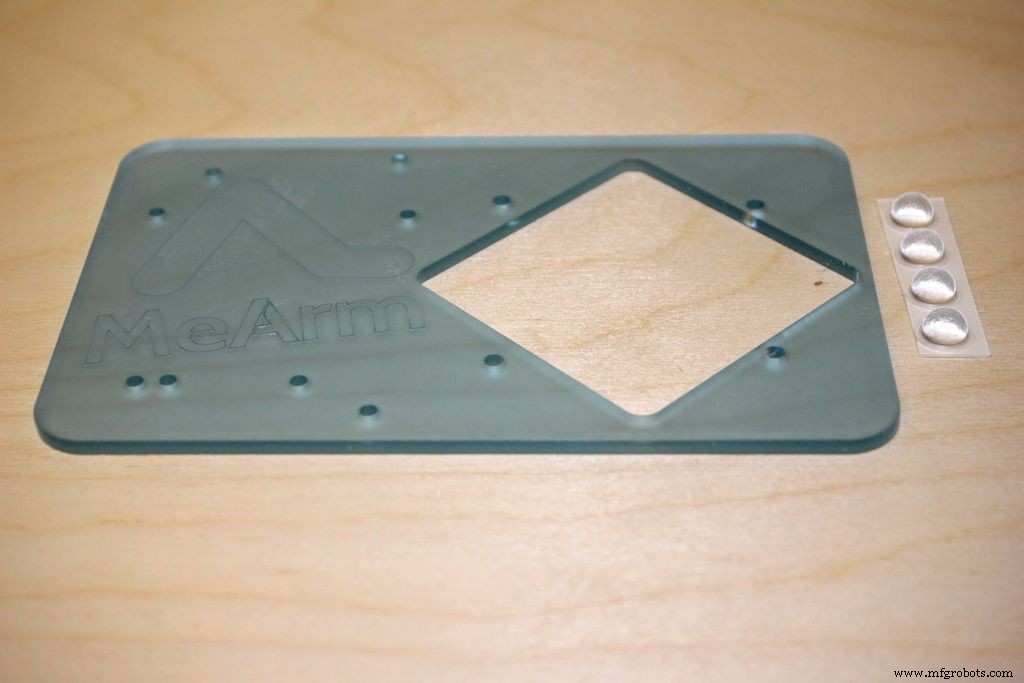
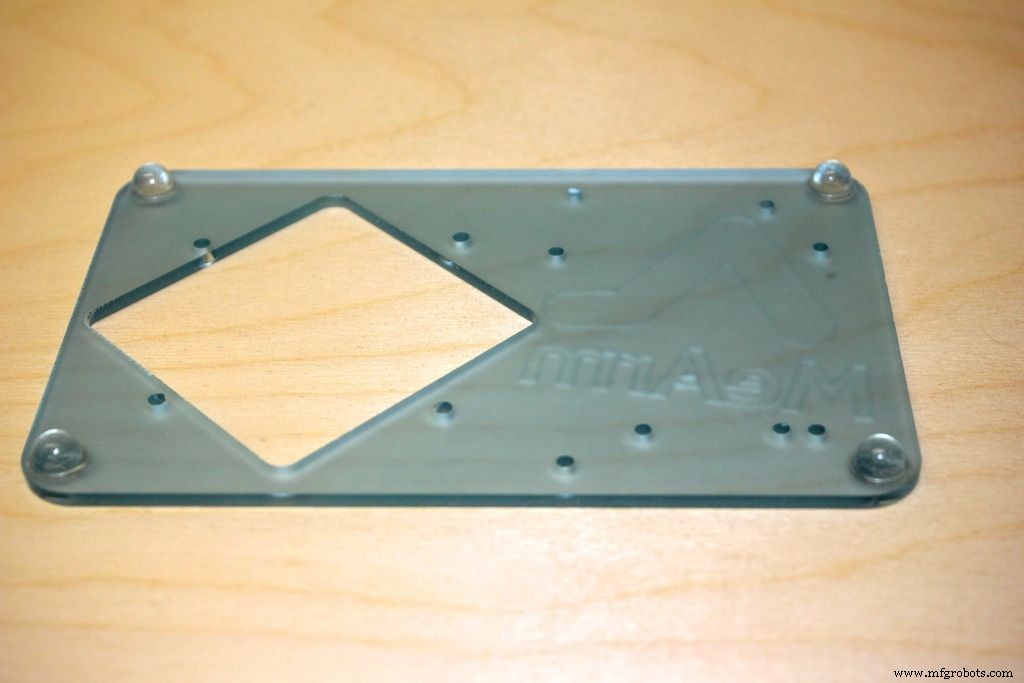
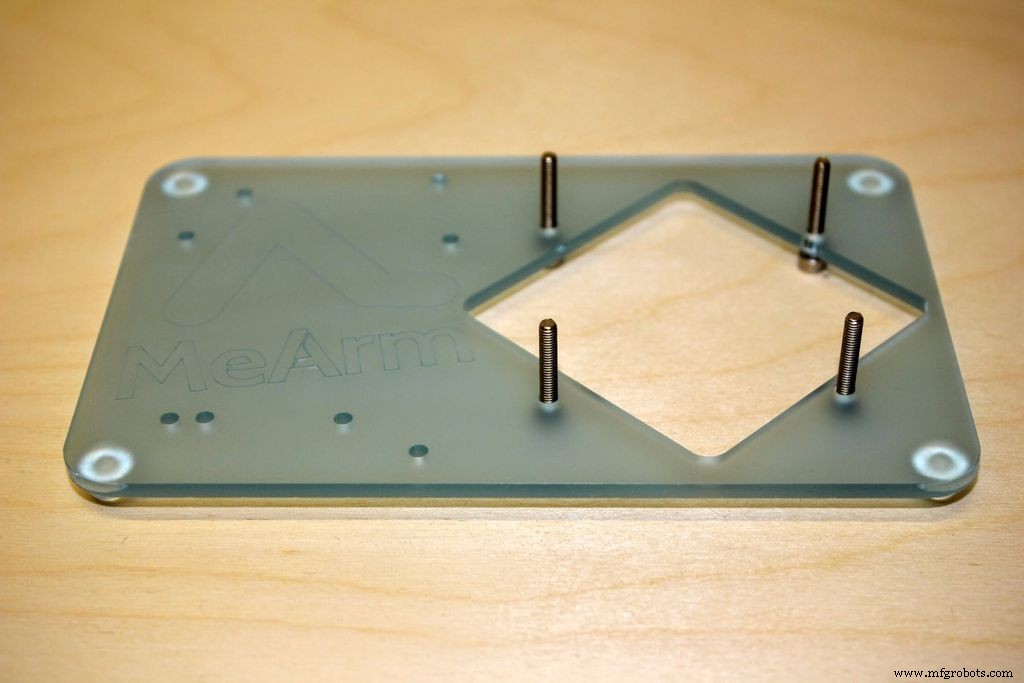
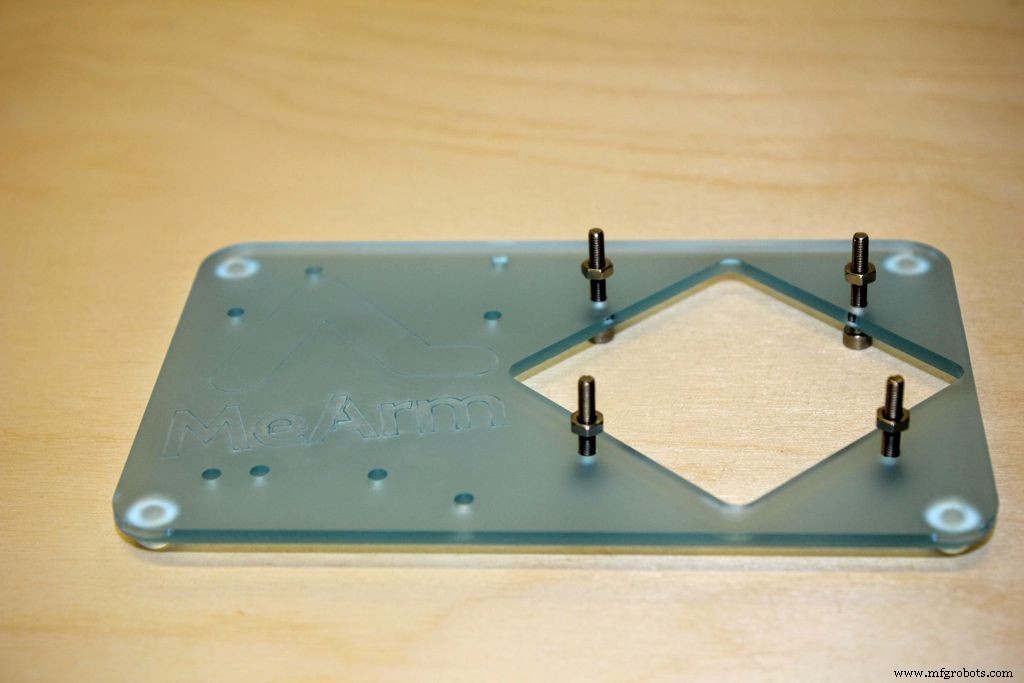
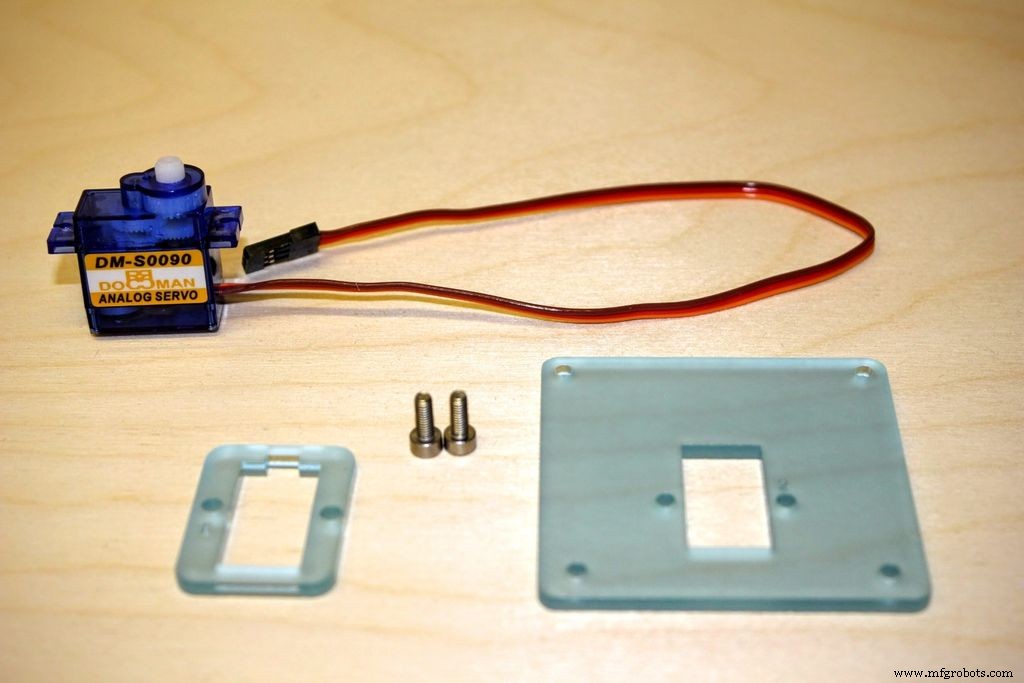
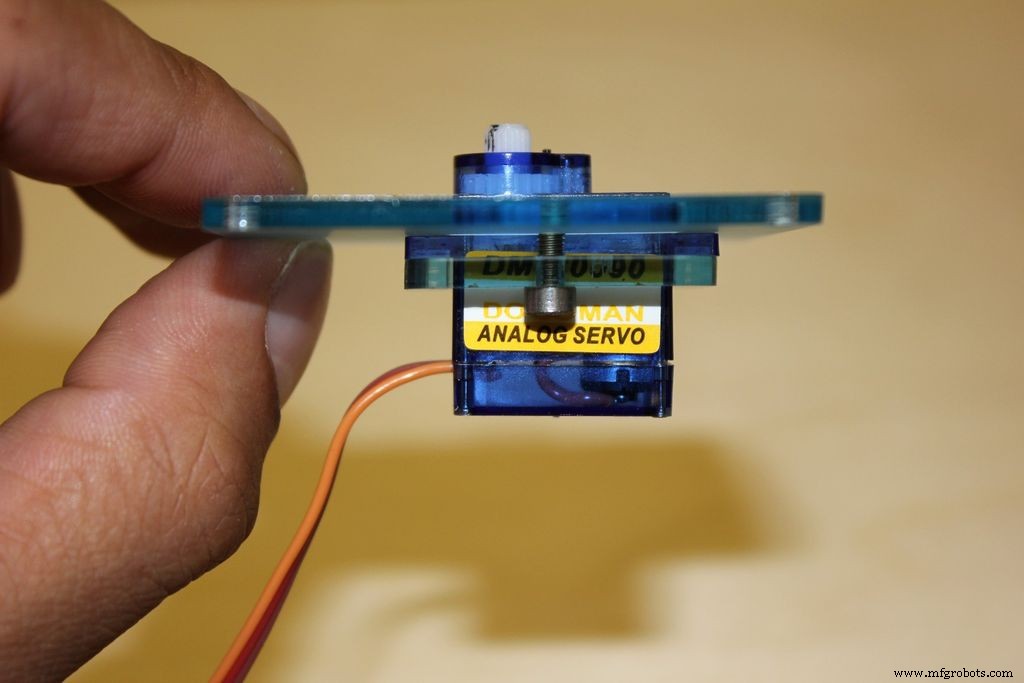
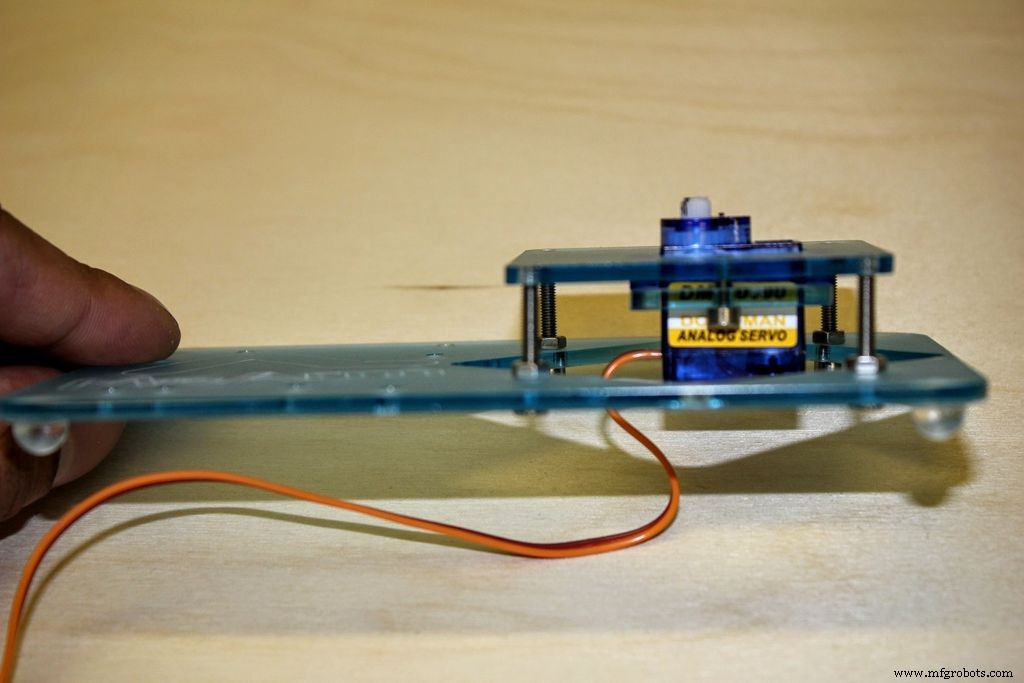
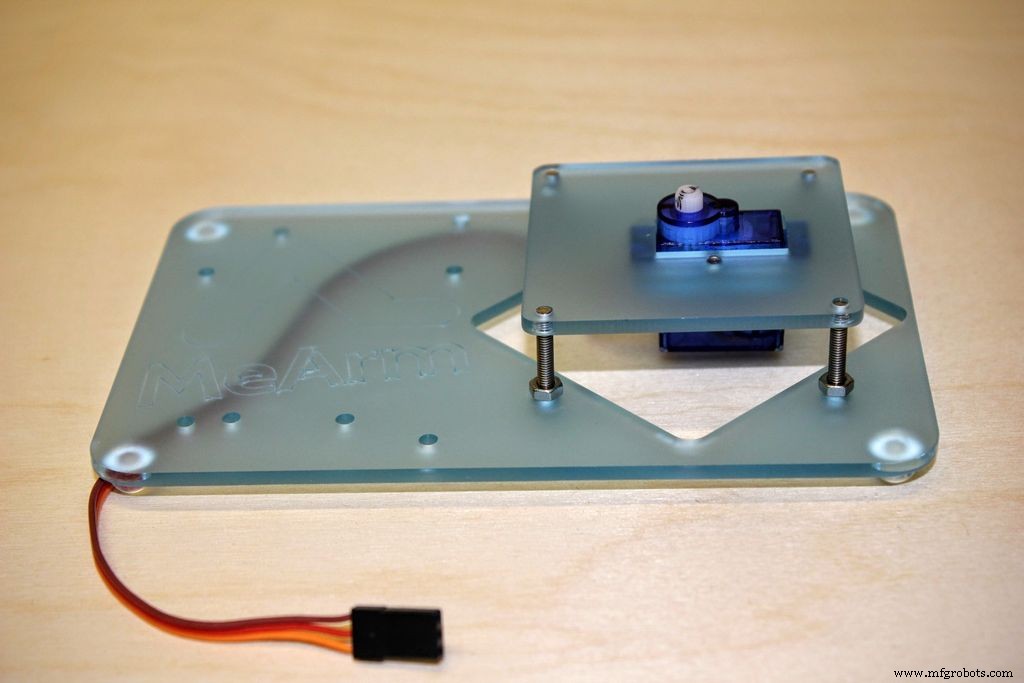
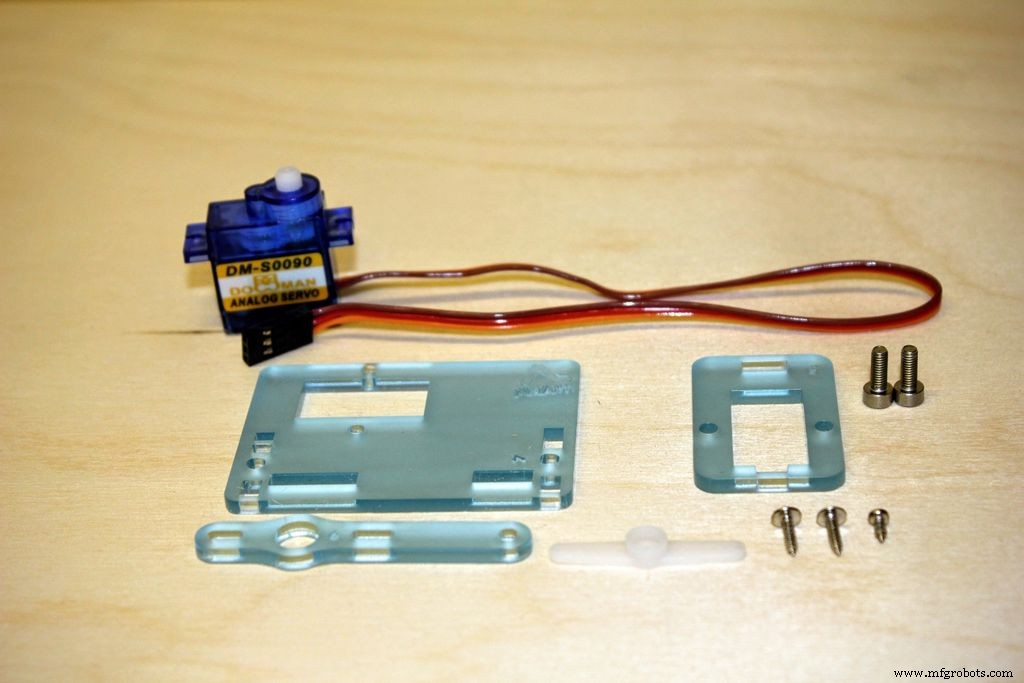
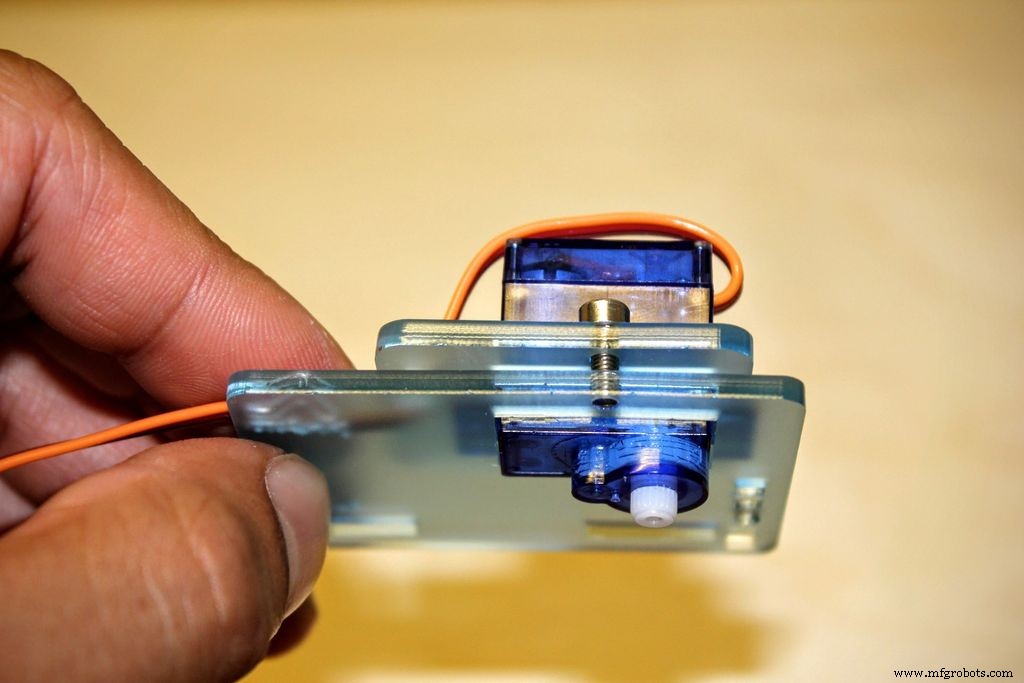
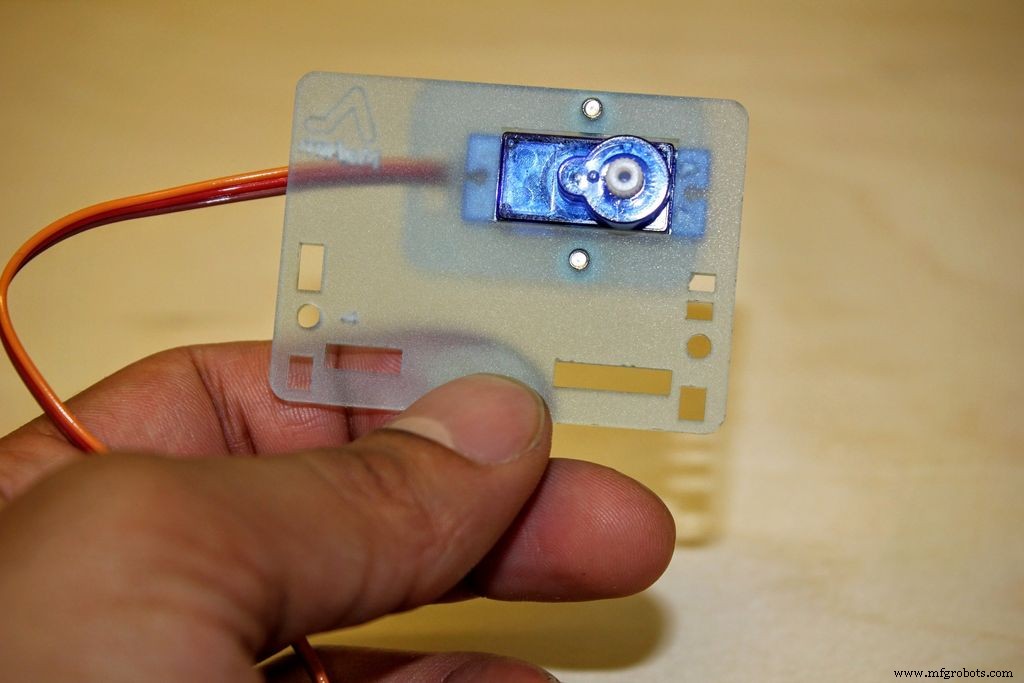
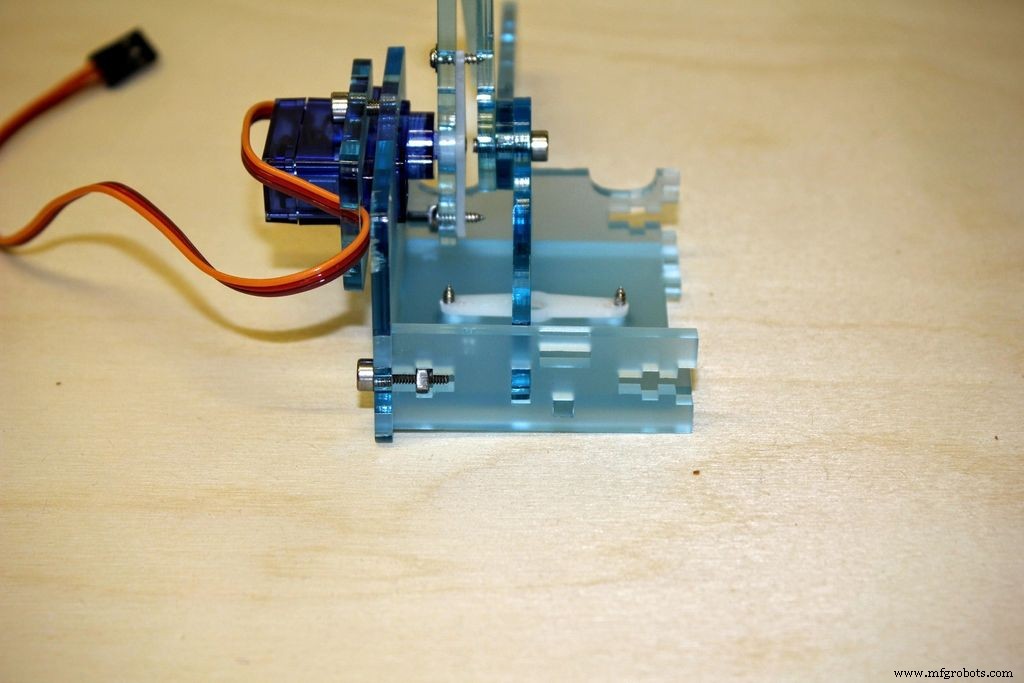
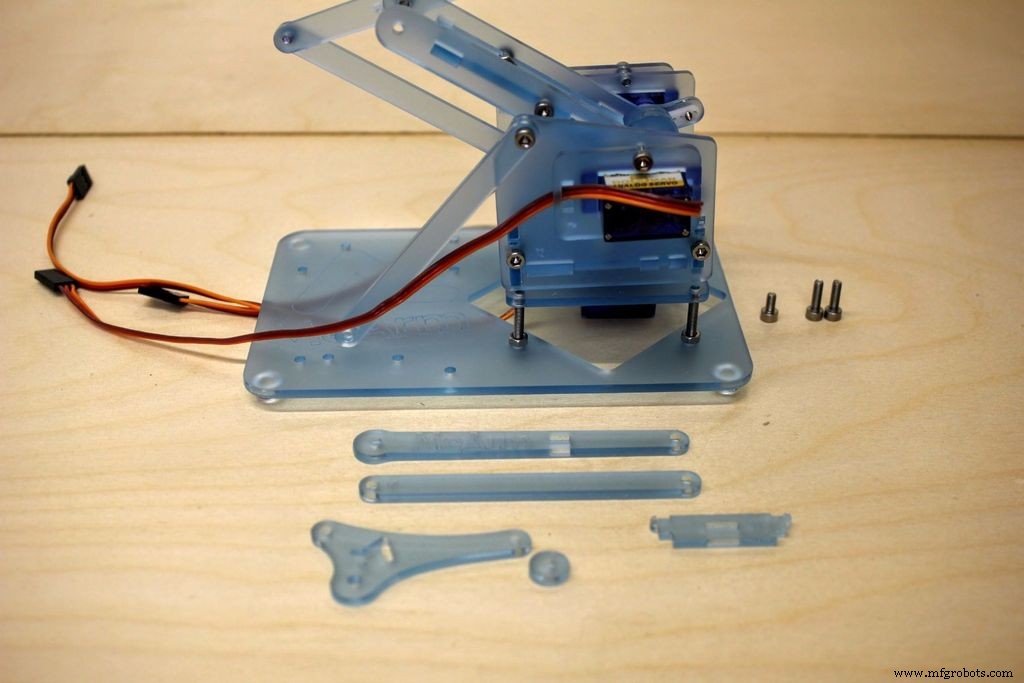
Localisez la plus grande partie (#1) et fixez les pieds du tampon collant à ses coins. Insérez ensuite les quatre vis de 20 mm par le dessous et vissez quatre écrous à mi-chemin. Trouvez maintenant les pièces #2, #3, votre servo central et deux vis de 8 mm. Enfilez le servo dans la pièce #3, que nous appelons un collier. Poussez les vis à travers le collier puis vissez-les dans la pièce #2.
Les vis s'auto-taraudent dans la pièce n°2, ce qui signifie qu'elles coupent leur propre filetage. Sur le MeArm, il y a deux tailles de trous, un à environ 3 mm où vous pouvez pousser la vis et l'autre à environ 2,6 mm où nous voulons que la vis s'autotaraude. C'est une méthode que nous avons empruntée à l'incroyable PlotClock de Joo.
Maintenant, nous fixons l'ensemble servo/collier à la pièce n°1 via les vis de 20 mm, celles-ci s'auto-tarauderont et l'orientation des trous sur les pièces devrait signifier que vous ne pouvez pas le faire à l'envers. C'est ce qu'on appelle le Poka-yoke et c'est une méthode pour des conceptions infaillibles. Si vous avez un premier modèle v1.0, vous verrez que ma tentative est trop zélée car il n'y a que 1/8 de façons de bien faire les choses (si vous ne pouvez pas faire correspondre les trous, retournez la pièce). Les versions ultérieures ont été tempérées par les conseils de Scott Pierce et ont 1/2 voies.
Étape 4 : côté gauche
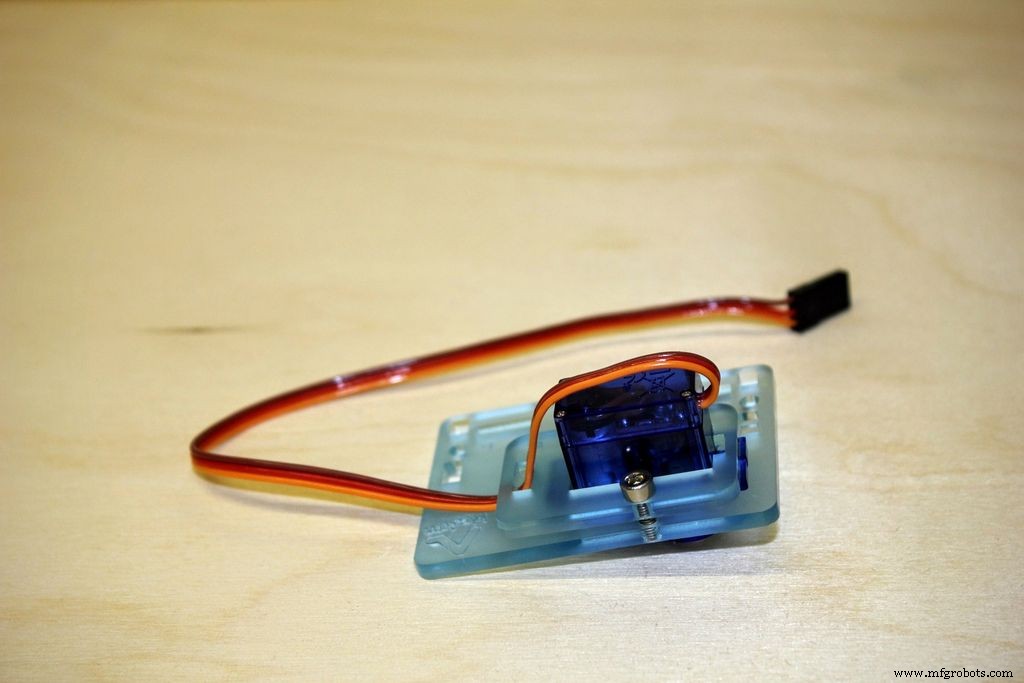

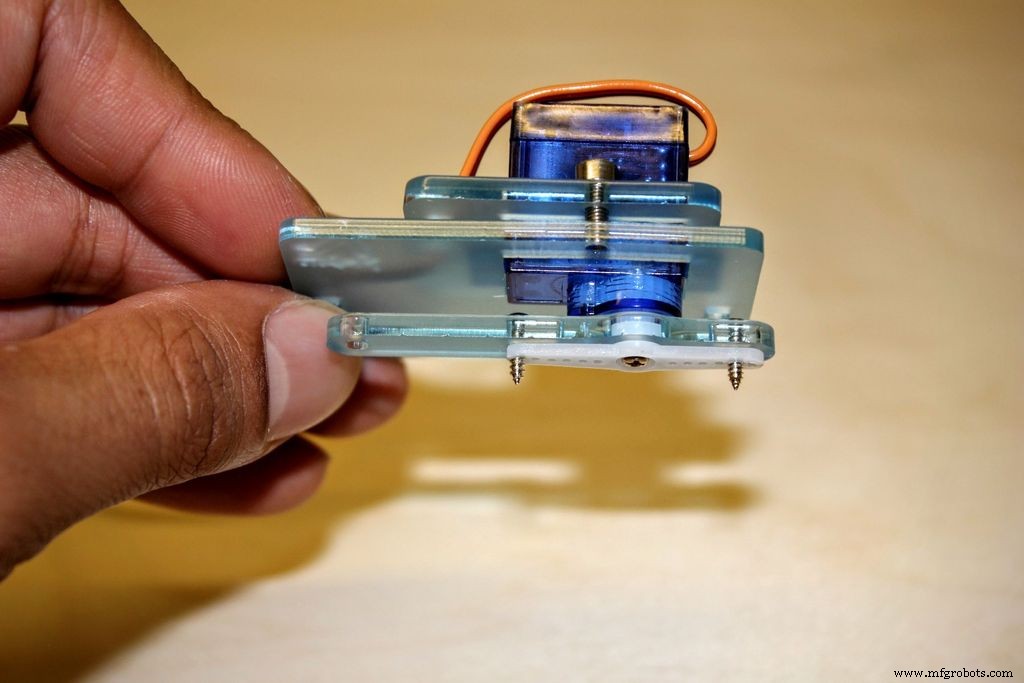
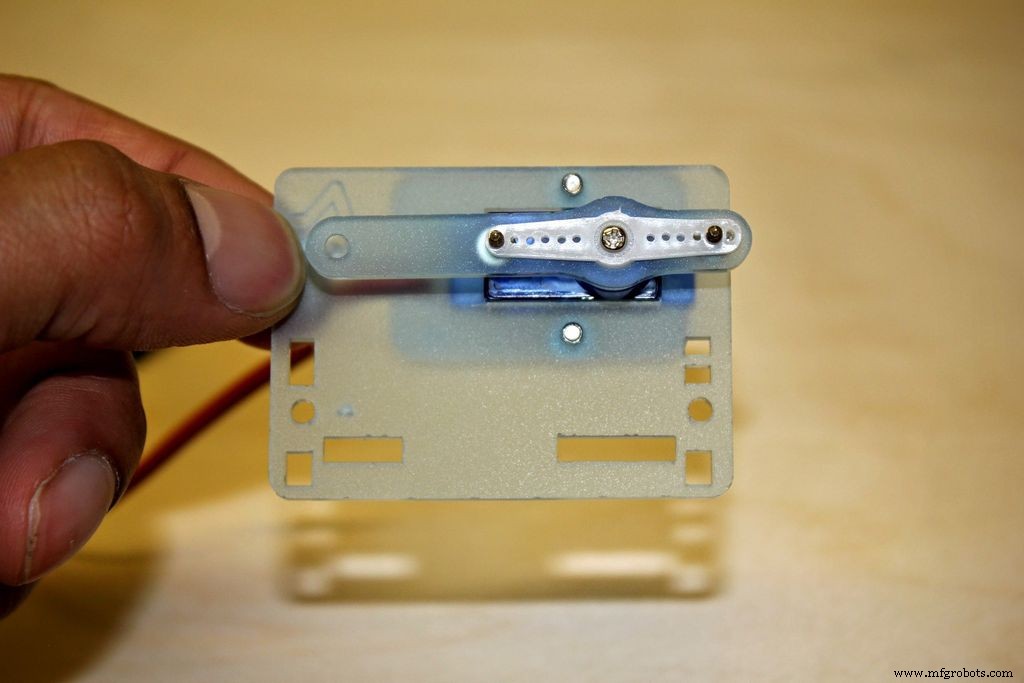
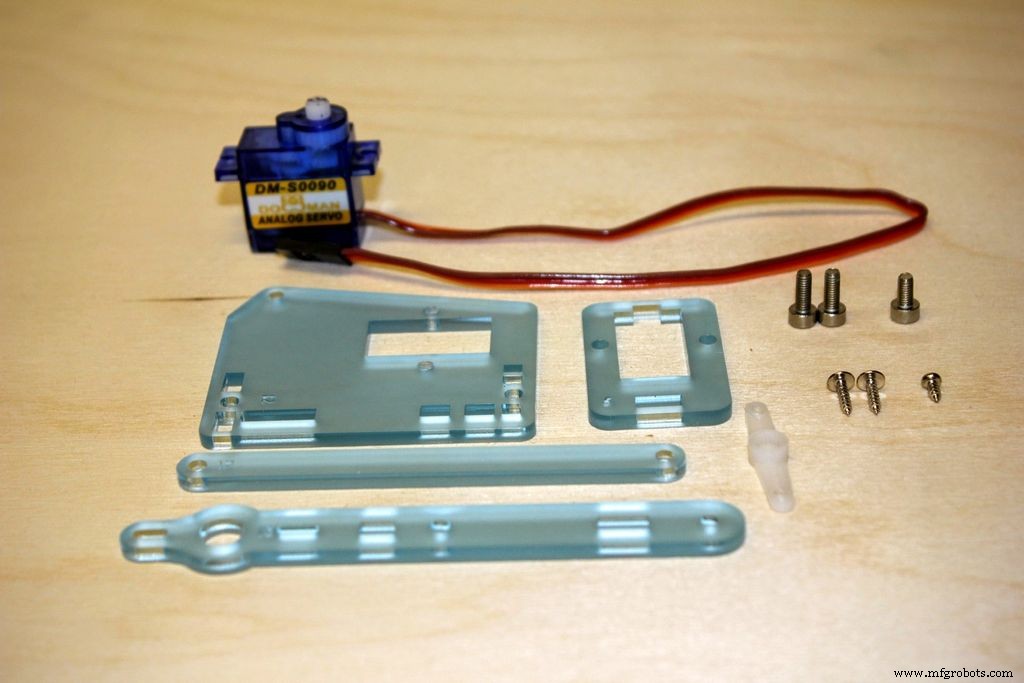
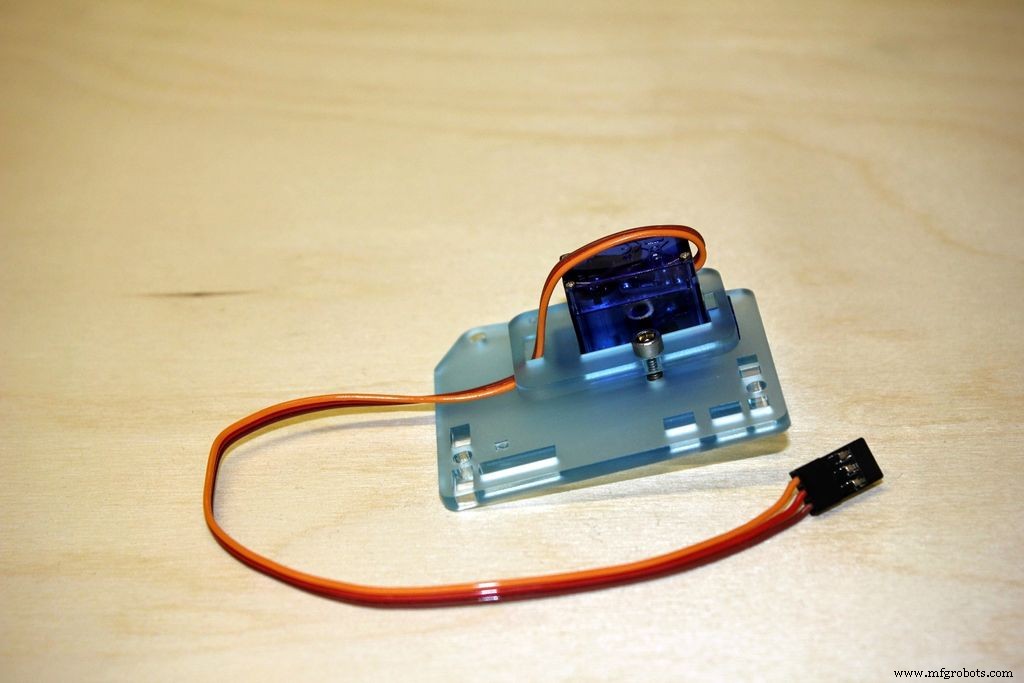
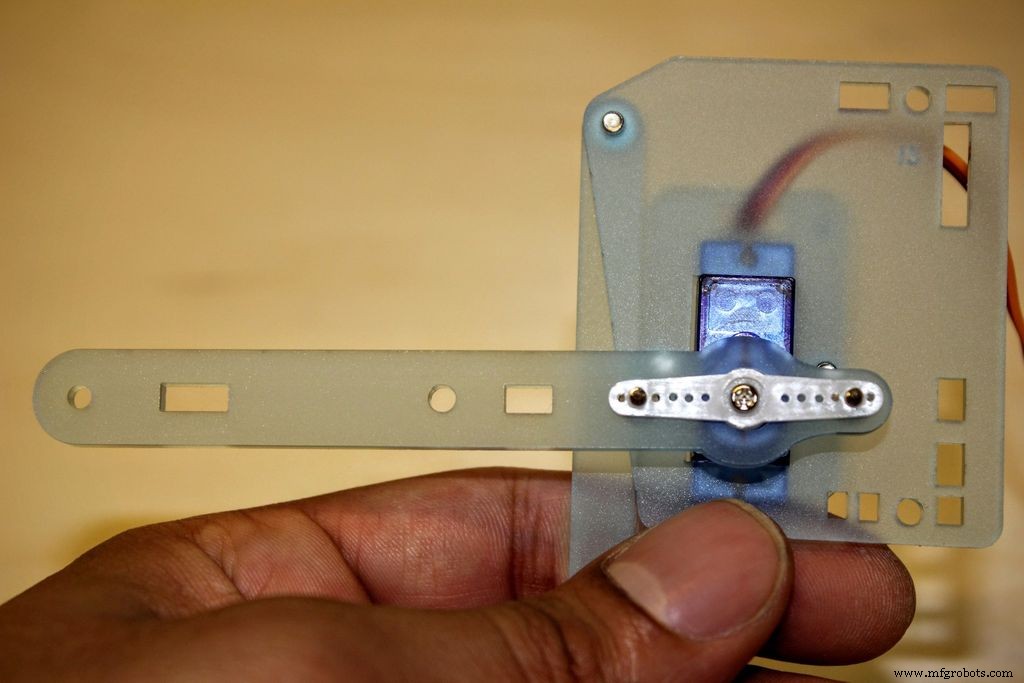
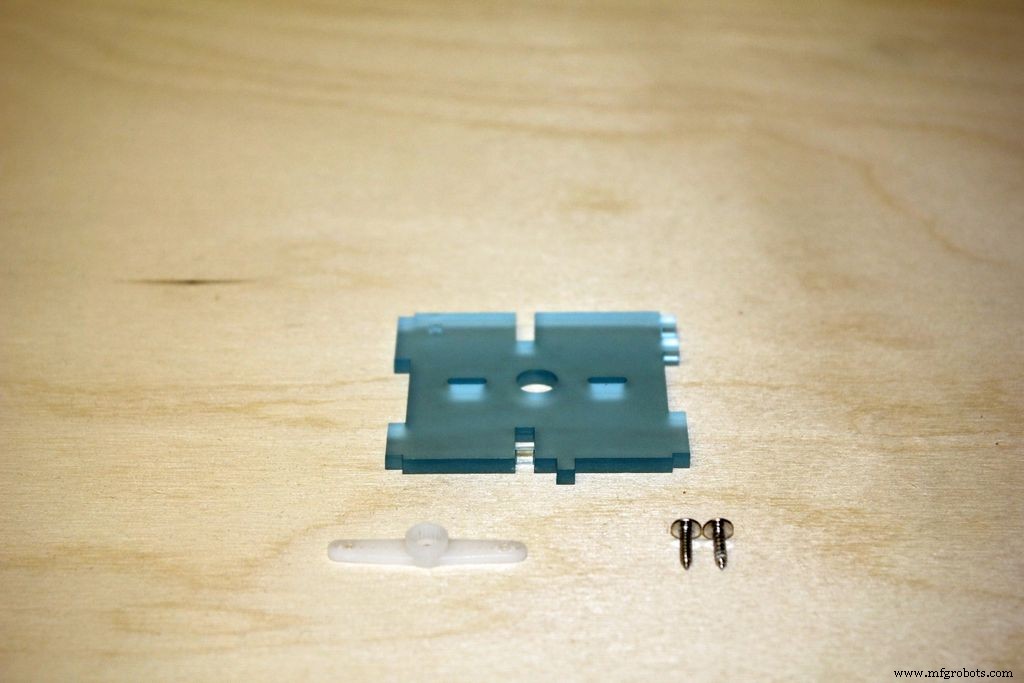
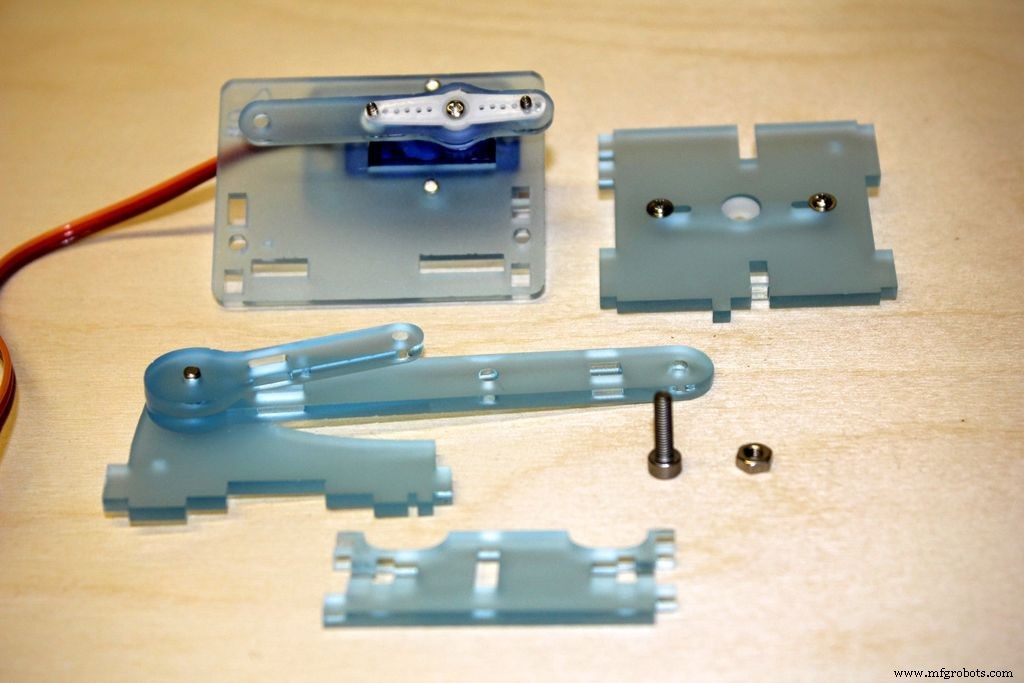
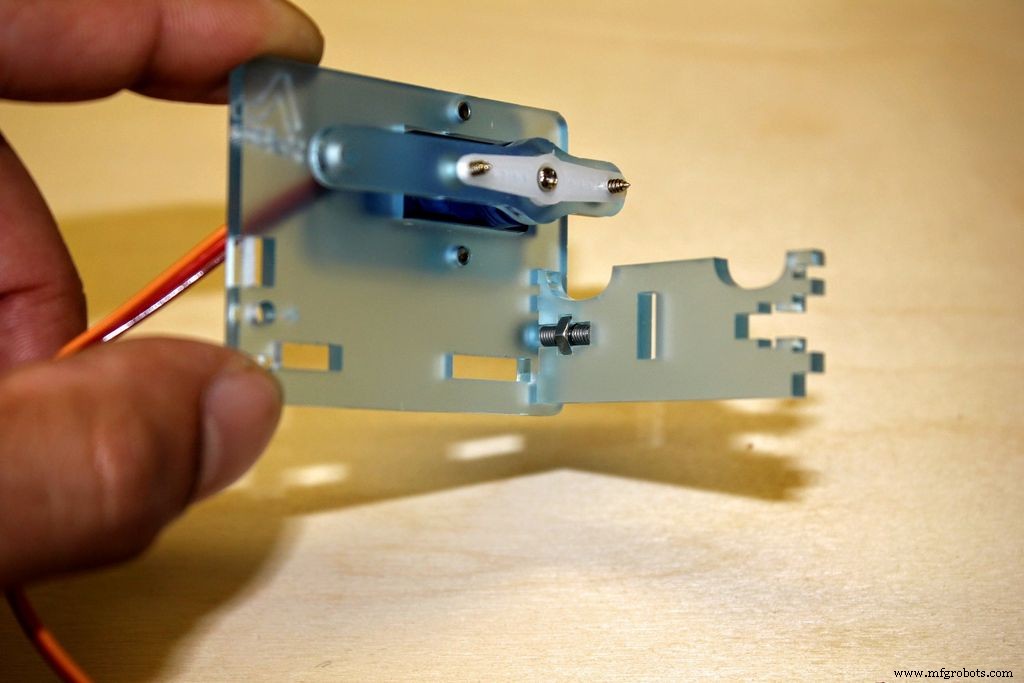
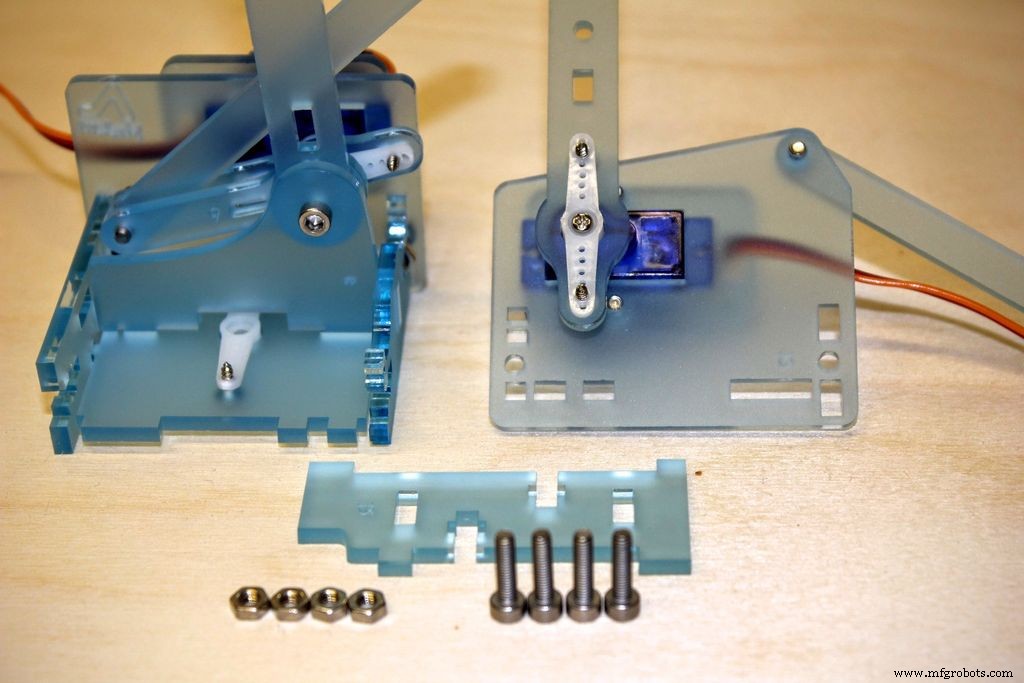
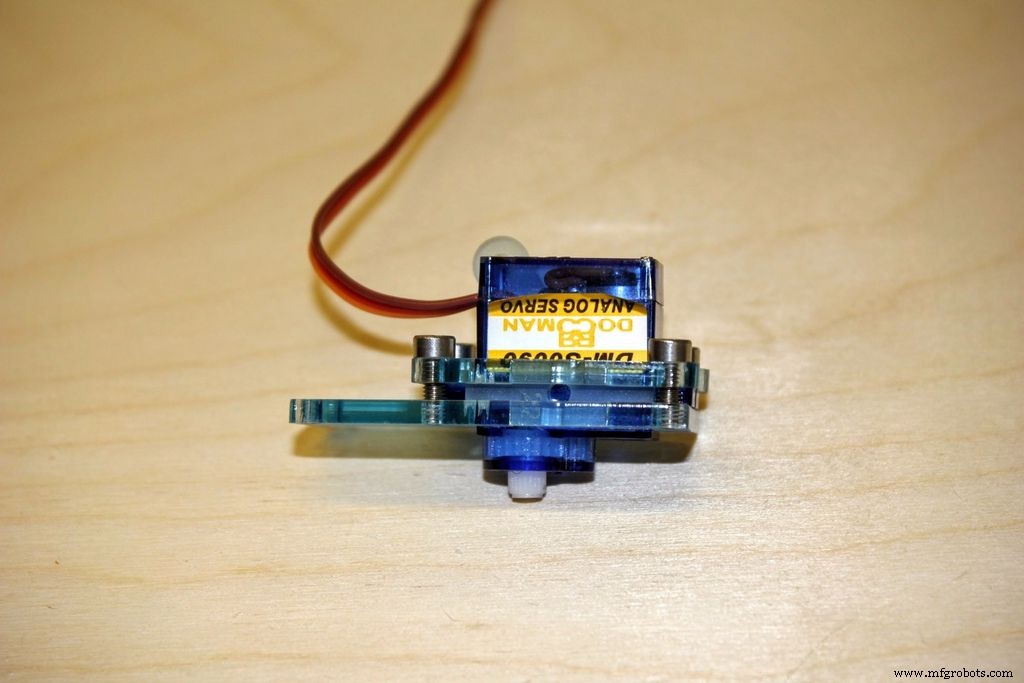
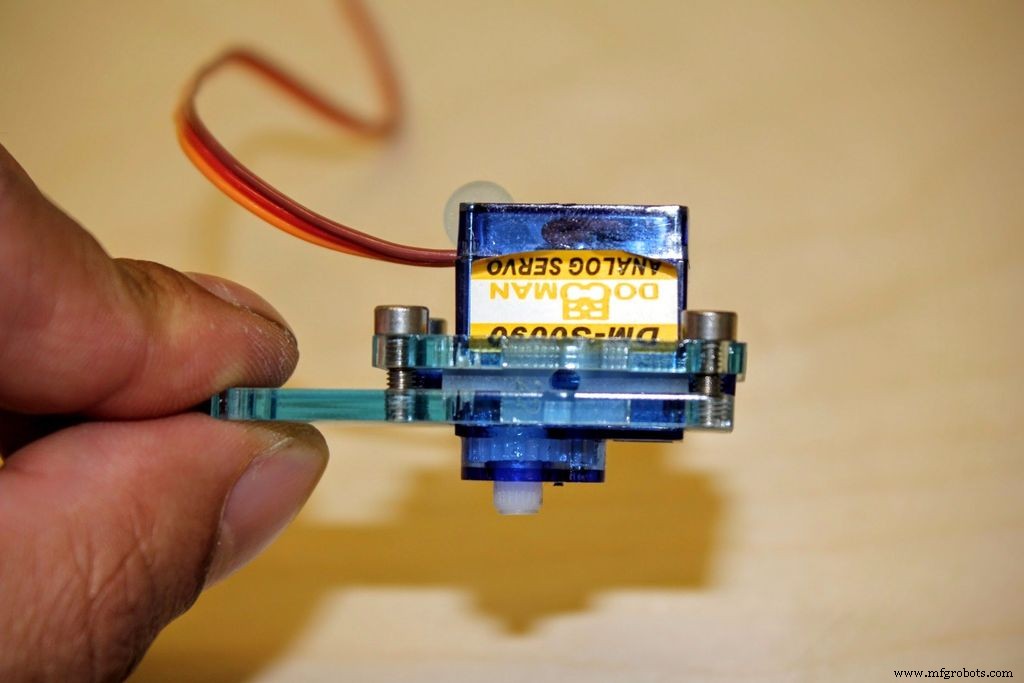
Localisez maintenant les pièces #4, #5, #6, le servo gauche, deux vis de 8 mm et un kit de fixation de servo.
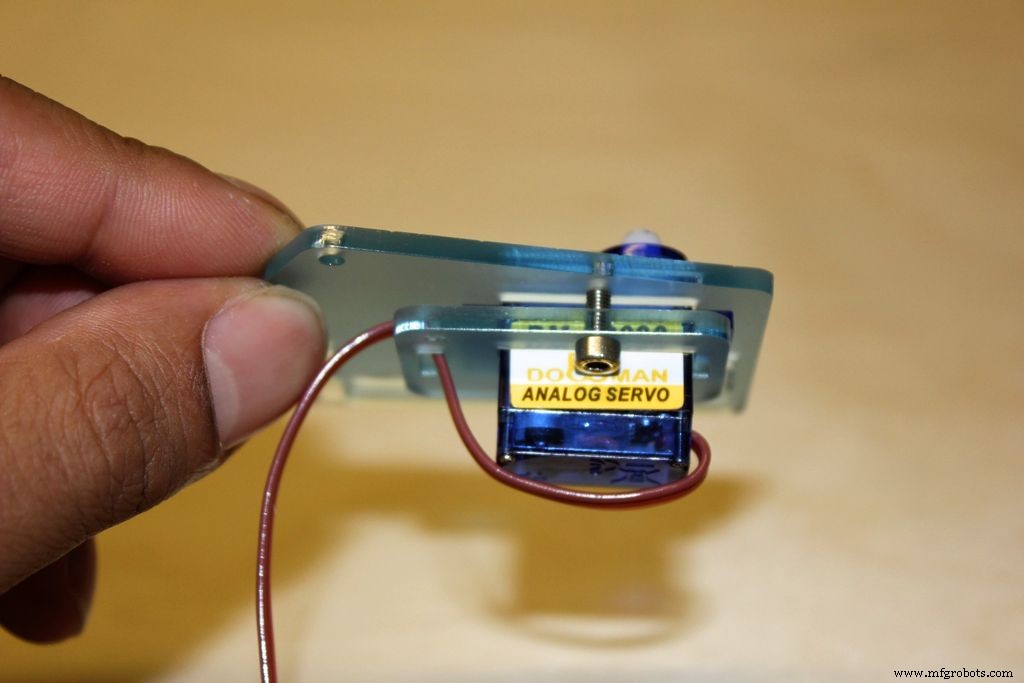
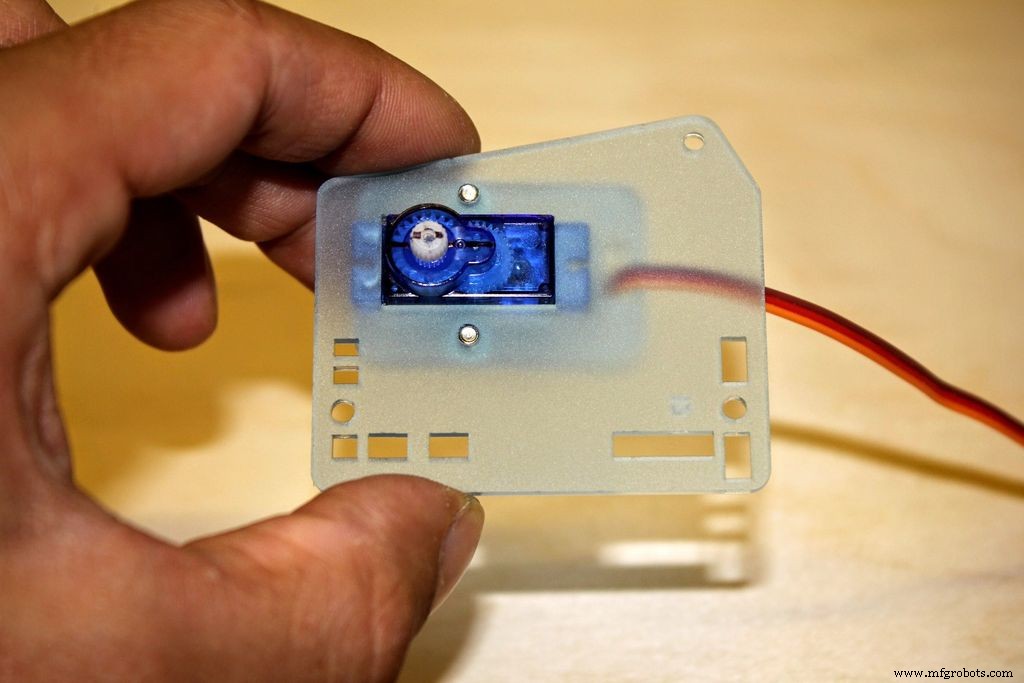
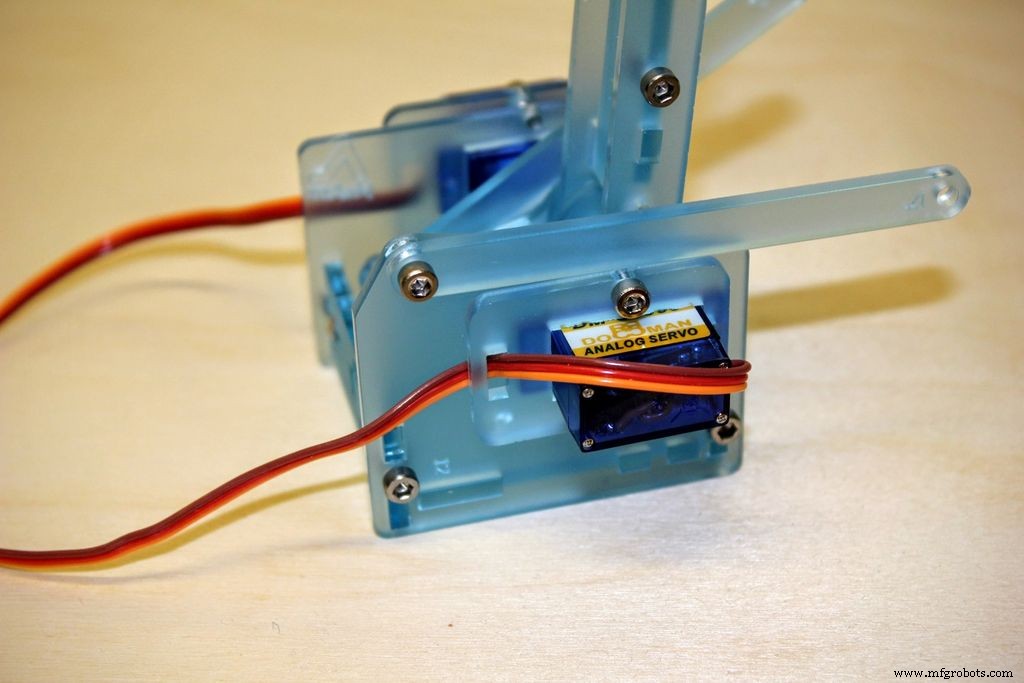
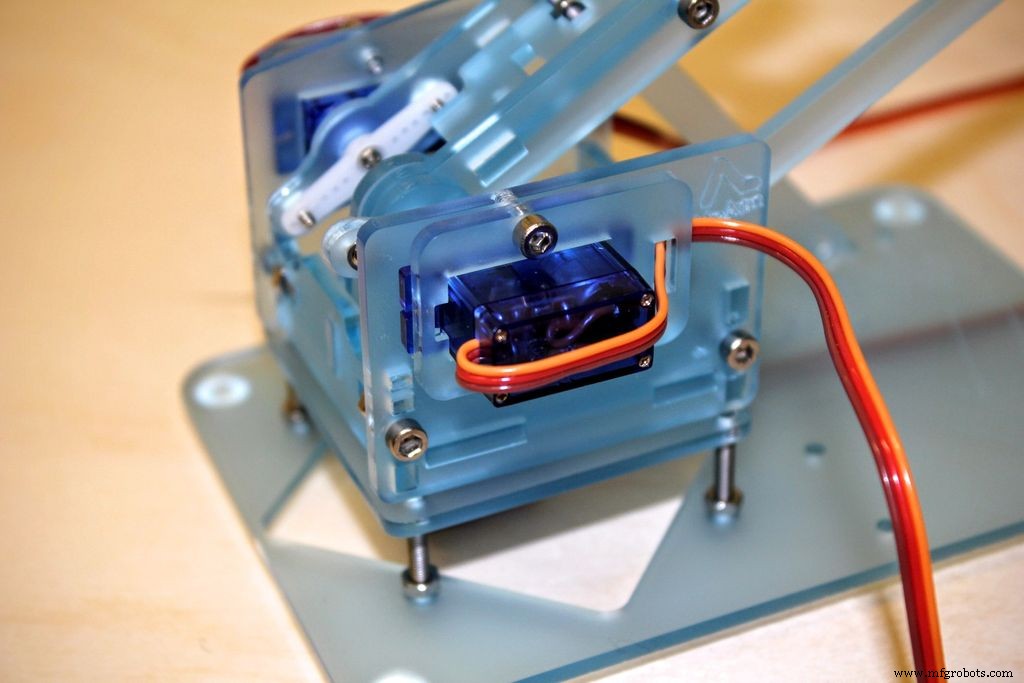
Faites passer le servo à travers le collier (pièce #5) puis le câble du servo à travers le trou de rangement des câbles. Vissez le collier à la pièce n°4 à l'aide des vis de 8 mm en faisant attention à ne pas trop serrer . Vous ne voulez pas que l'acrylique se plie, maintenez simplement le servo en place.
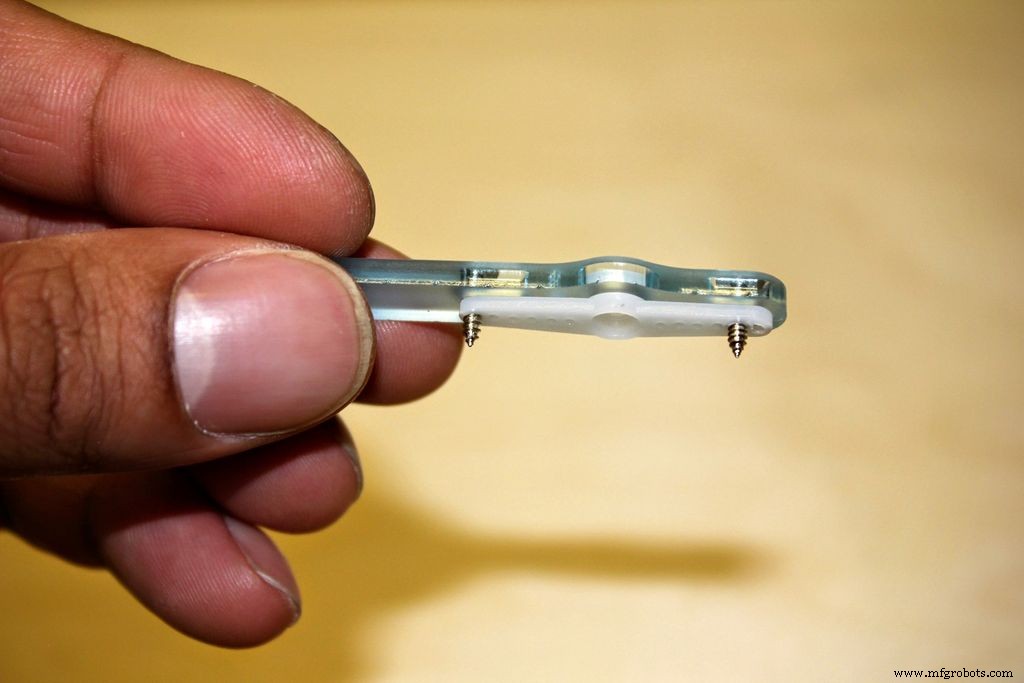
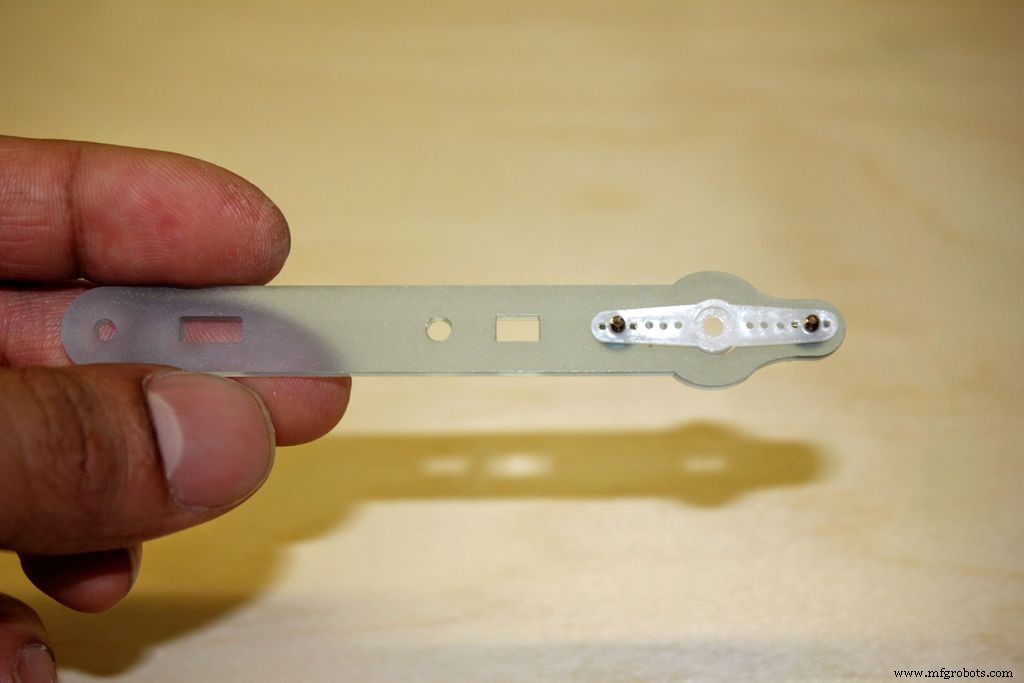
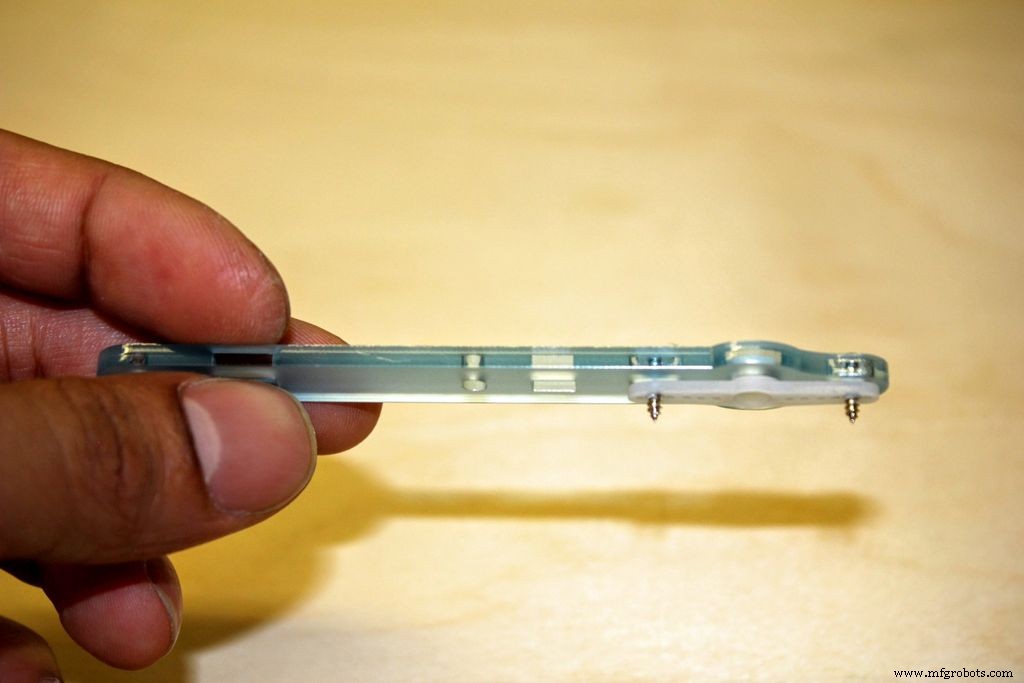
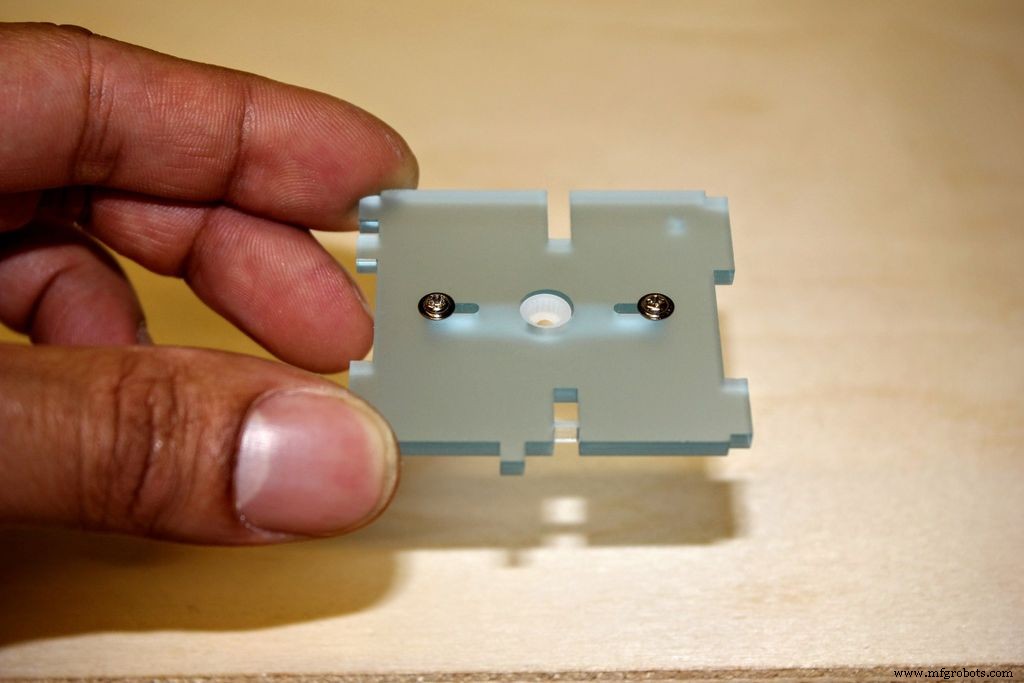
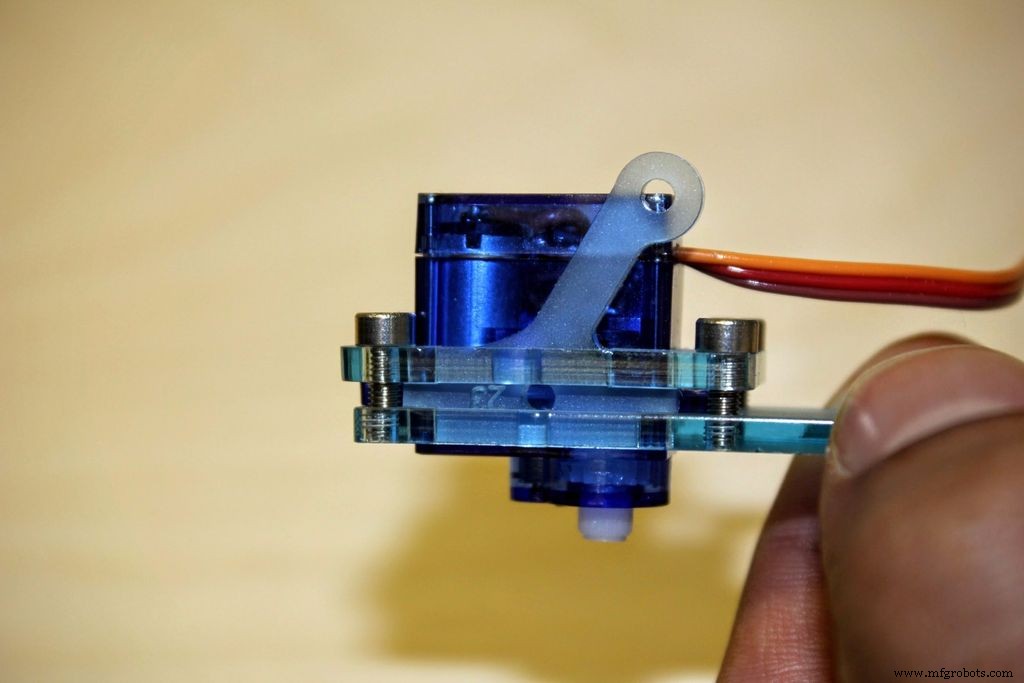
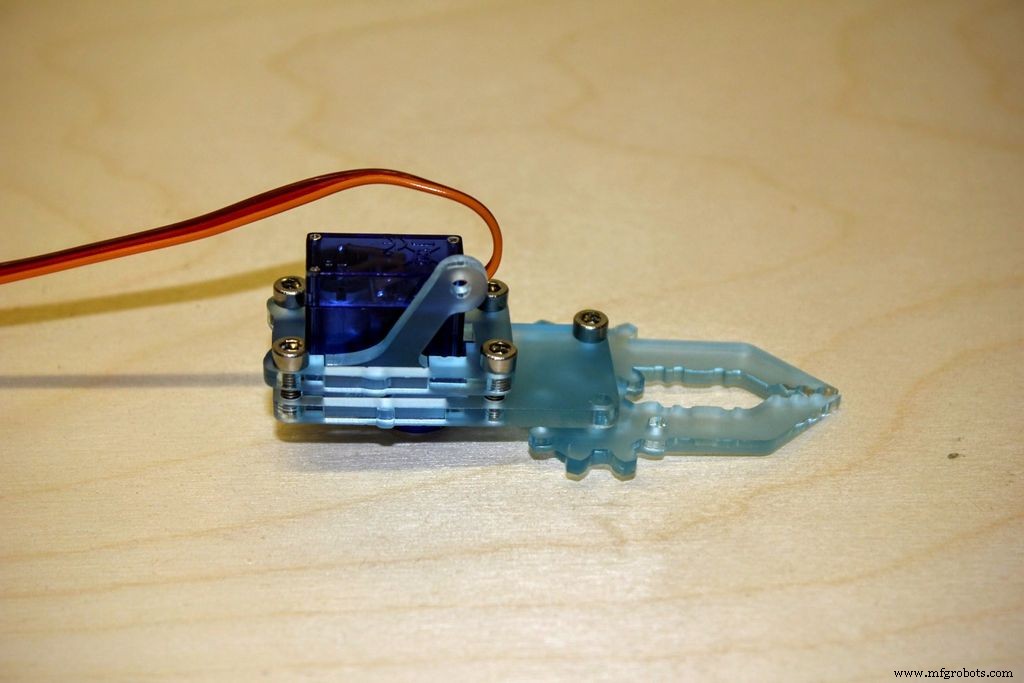
Fixez maintenant la fixation du servo (la chose blanche, ils s'appellent des cornes) au bras du servo (#6) à l'aide des vis pointues du pack de fixation du servo. Ceux-ci s'enfonceront automatiquement dans le palonnier en plastique blanc. Ils peuvent être un peu délicats, alors soyez prudent ici. Si vous construisez avec un enfant, c'est à temps que vous voudrez vous impliquer.
Fixez la fixation du servo à votre servo calibré comme indiqué, elle doit être parallèle au côté le plus long de la pièce n° 4 et les lignes que vous avez dessinées plus tôt doivent toujours correspondre. À l'aide de la petite vis mécanique du pack servo, fixez-le au servo, mais encore une fois, ne serrez pas trop !
Étape 5 : Côté droit
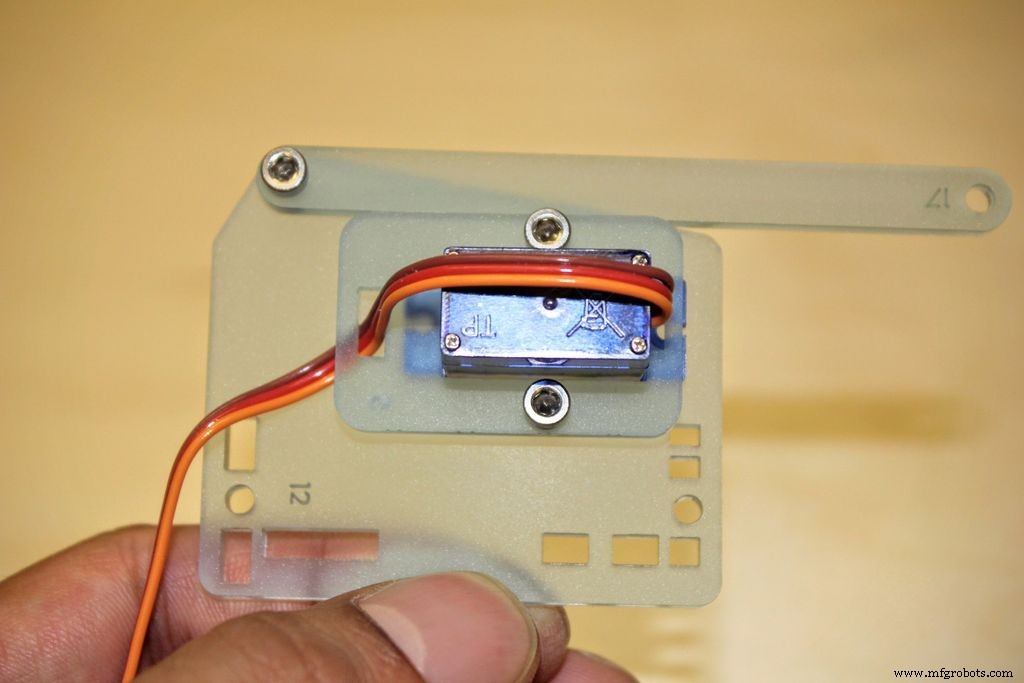
Les pièces que nous voulons ici sont :
#5, #12, #13, #17, deux vis de 8 mm, une vis de 6 mm, le servo droit et un pack de fixations de servo.
Faites passer le servo à travers le collier et le câble à travers le passe-câbles comme auparavant, fixez-le à la plaque latérale avec les vis de 8 mm, en faisant encore une fois attention à ne pas casser la plaque en serrant trop fort. Fixez le palonnier blanc au bras de servo (#13) à l'aide des vis pointues comme précédemment. Attachez-le au servo avec le bras à 90 degrés du côté le plus long de la plaque latérale. Encore une fois, les lignes noires que vous avez tracées doivent s'aligner.
Enfin, à cette étape, fixez la pièce #17 à la plaque latérale à l'aide de la vis de 6 mm.
Étape 6 : Construisez le milieu
Ces pièces relient les sections gauche et droite ensemble. Nous les appelons la base et le cochon.
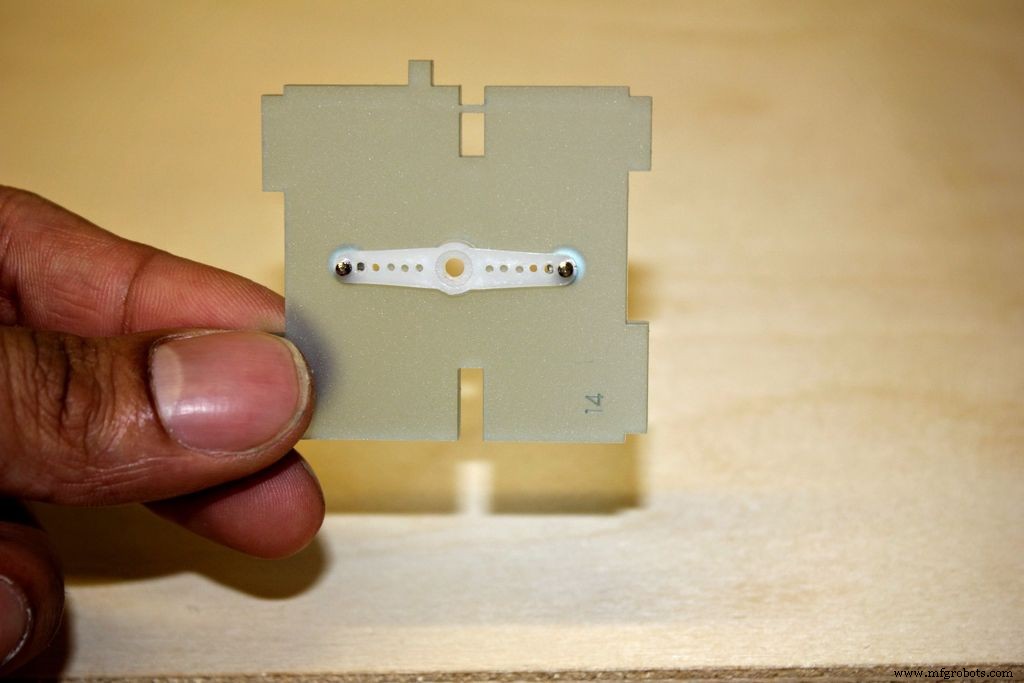
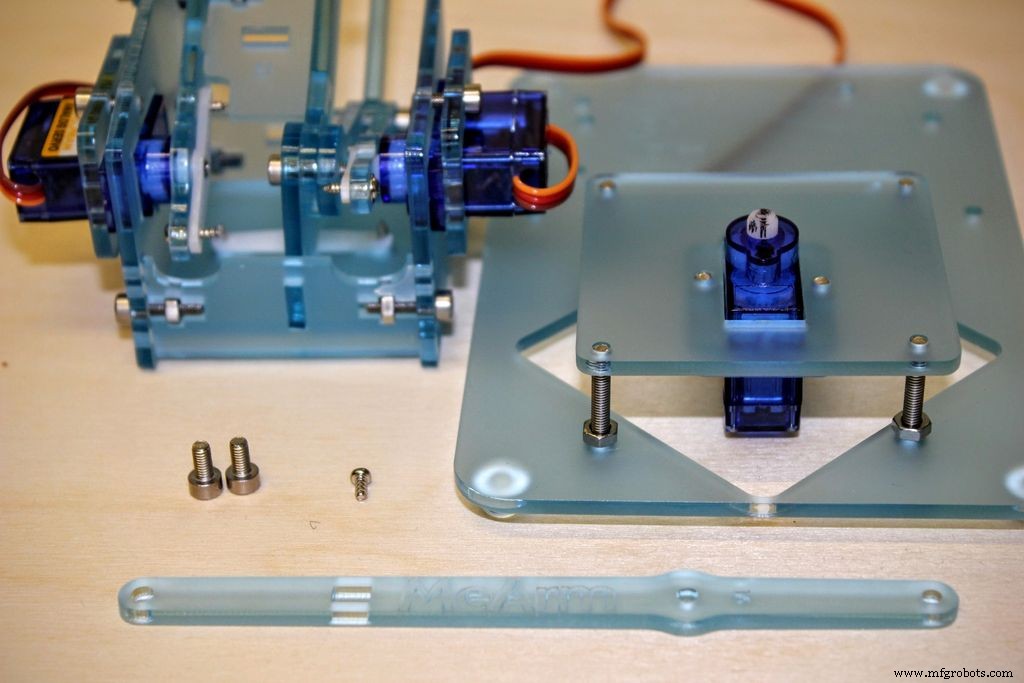
Pour la base, trouvez la pièce #14 et un pack de fixations de servo. En notant soigneusement l'orientation, fixez le palonnier à l'aide des vis pointues. À ce stade, offrez-le à la pièce latérale gauche pour voir si vous avez les choses dans le bon sens. Le Poka-yoking devrait vous montrer le chemin ici.
Pour le cochon, trouvez les pièces n°8, n°9, n°10 et une vis de 10 mm. Vissez-les ensemble dans l'ordre indiqué, qui devrait être #9, #10, #8 avec la vis venant du côté #8 et autotaraudante dans #9. Désolé, l'ordre est déroutant, mais c'est honnêtement la première fois que j'écris cela avec les chiffres ! Il est important que ceux-ci se déplacent autour de l'axe (la vis) en ligne droite et qu'ils se déplacent librement. S'ils ne se déplacent pas en ligne droite, dévissez-les, maintenez-les ensemble et revissez-les pour qu'ils soient tous aussi parallèles que possible.
Étape 7 :De gauche au milieu
Maintenant, nous voulons commencer à rassembler les parties gauche et droite en utilisant les parties centrales.
Fixez d'abord l'assemblage de gauche à la pièce n° 7 avec une vis et un écrou de 12 mm. La façon la plus simple de le faire est de pousser la vis de 12 mm à travers l'assemblage de gauche et de mettre l'écrou sur un demi-tour environ. Placez la fente de la pièce #7 sur l'écrou et commencez à serrer la vis. Ne pas trop serrer.
Vous devriez voir la fente pour le cochon sur la pièce #7 (la jambe de force avant). Placez le racleur dans la fente, puis insérez la partie de base dans les fentes de l'assemblage de gauche et faites levier vers le haut pour rejoindre les fentes sur le racleur. Vérifiez le palonnier ici, si vous l'avez à l'envers, vous allez être vraiment ennuyé plus tard.
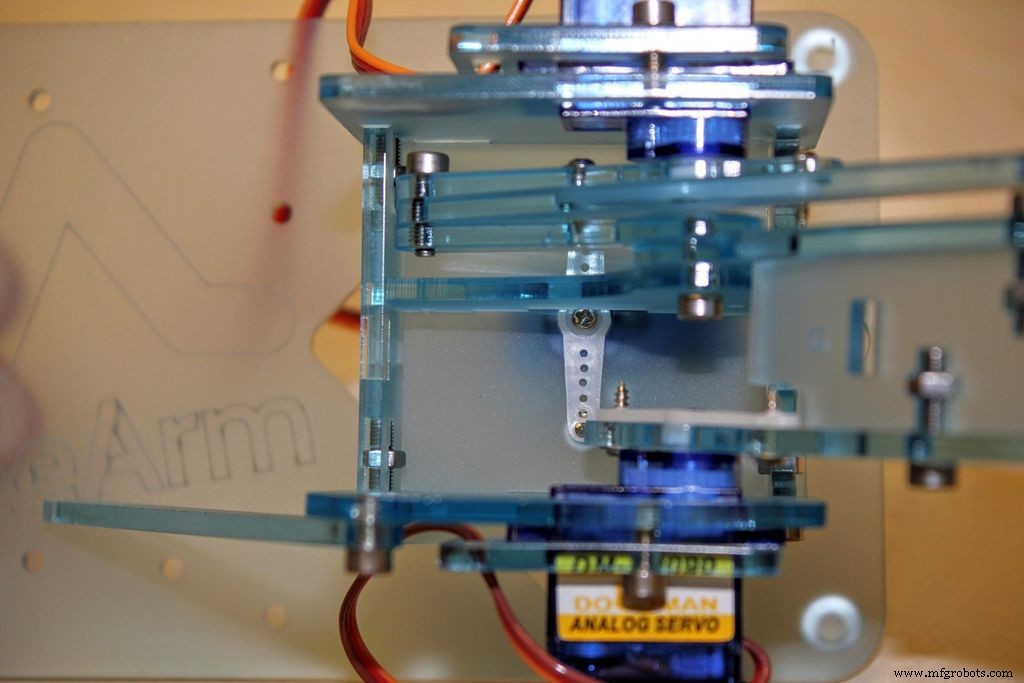
Avec le racleur en place, vous pouvez attacher un levier (#17), une entretoise en option (#20) au levier du servo (#6) et au levier sur le racleur (#9) avec une vis de 12 mm ou 10 mm selon que vous avez besoin de l'entretoise. Les servos Doman vus ici ne nécessitent pas d'entretoise, mais les derniers servos que nous utilisons le font. Il y a des pièces de rechange dans notre pack à cet effet.
Fixez maintenant la jambe de force arrière, pièce #11 à l'aide d'une vis et d'un écrou de 12 mm comme sur la jambe de force avant. Il doit s'emboîter sur l'arrière du porc et aussi sur la bosse de la plaque de base. Serrez ceci mais laissez un peu de mou car le réglage sera utile lorsque vous accouplerez la partie droite.
Étape 8 :Attachez à droite
Maintenant, nous accouplons le côté droit de notre assemblage complexe, cela implique également de mettre la partie en sangle n°15.
Fixez la pièce n°15 à la pièce n°10 (sur le cochon) à l'aide d'une vis et d'un écrou de 12 mm.
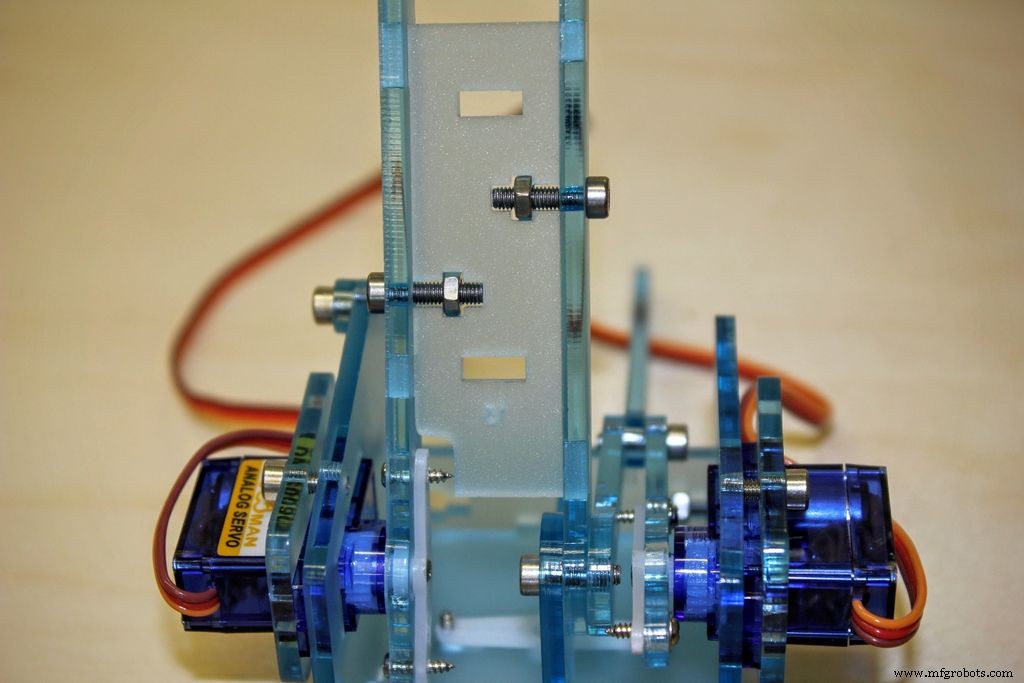
Vient maintenant la fixation du côté droit au reste de l'assemblage. Vous pouvez mettre les vis et les écrous de 12 mm à travers le côté droit avant d'essayer d'assembler les pièces, ou vous pouvez les laisser de côté et les remettre en place par la suite. Ici, vous essayez d'obtenir un certain nombre de pièces dans les emplacements en même temps et cela peut être délicat
Prenez votre temps et soyez patient s'il vous plaît. Cette étape est la plus délicate de toute la construction. Une fois que vous avez fait cela, cela devient plus facile, je vous le promets !
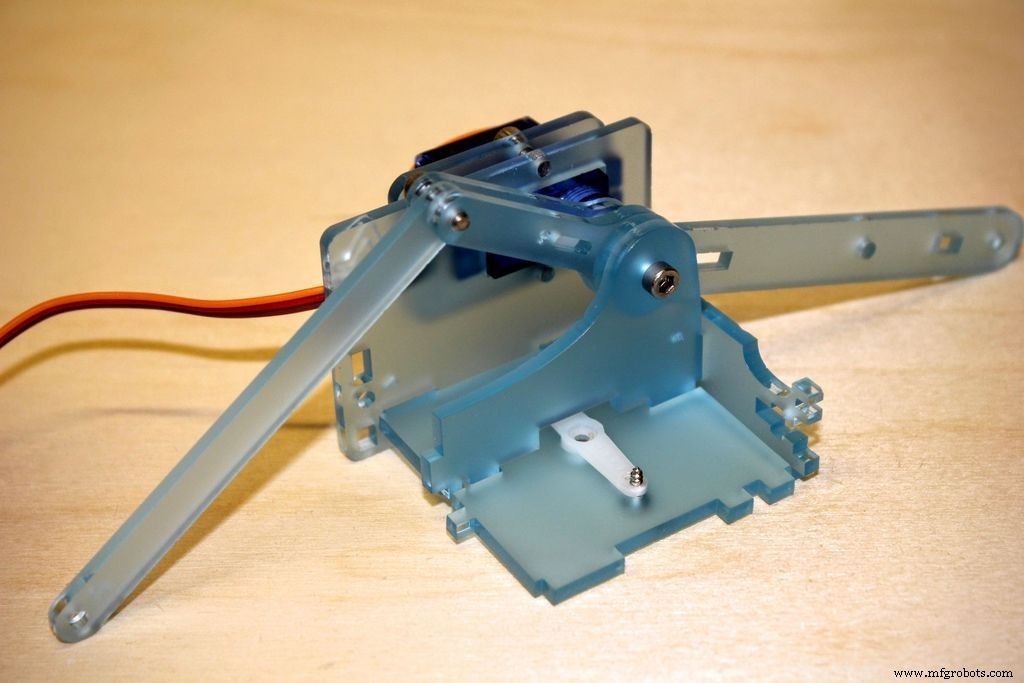
Étape 9 :Fixez à la base, ajoutez l'avant-bras gauche
Maintenant que nous avons le bel assemblage central terminé, nous pouvons le visser à la base.
Il s'agit d'accoupler le palonnier du servo au servo central et de le fixer avec une vis.
Nous pouvons maintenant ajouter la pièce #16 à l'aide de deux vis de 6 mm. Celui-ci se vissera sur la pièce #10 et sur la #17. Vous devriez pouvoir déplacer le servo facilement avec cette nouvelle pièce !
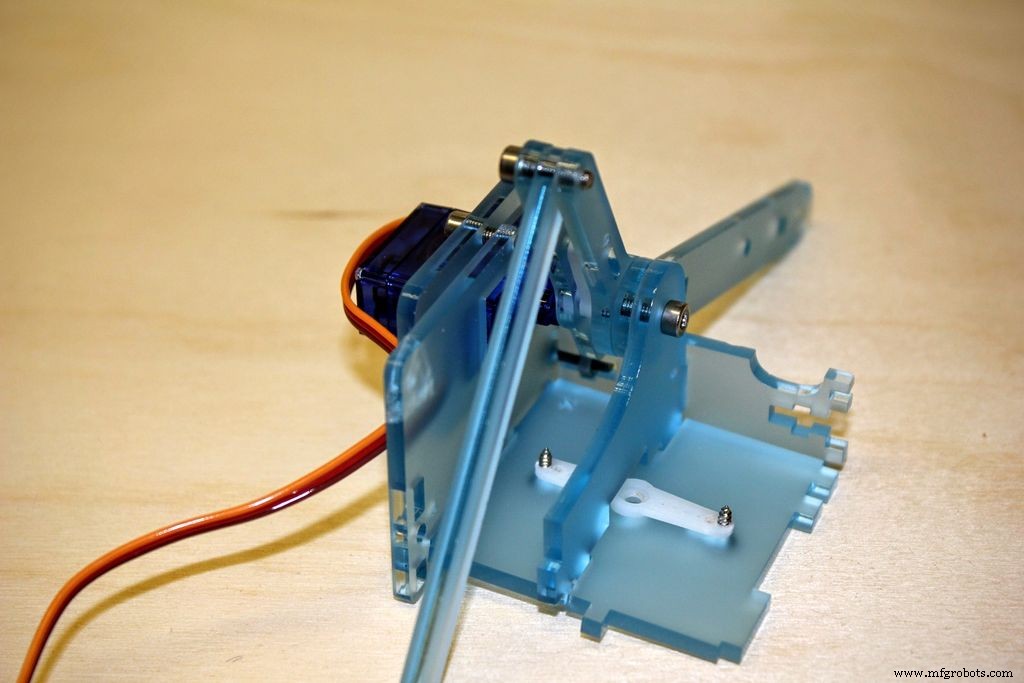
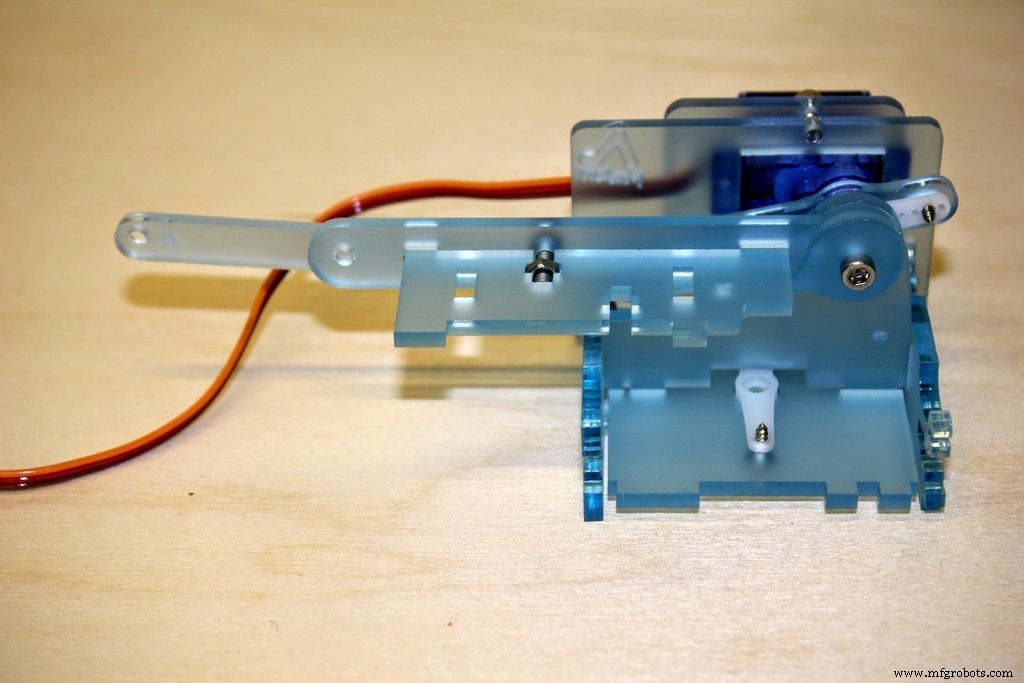
Étape 10 :Avant-bras droit


Ensuite, nous construisons l'avant-bras droit.
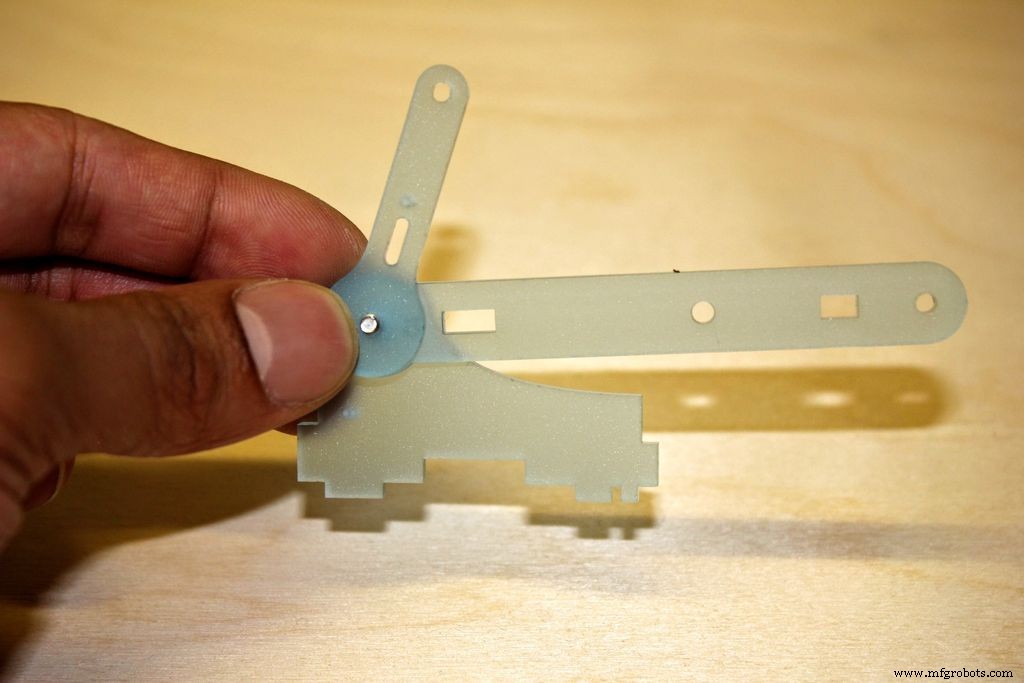
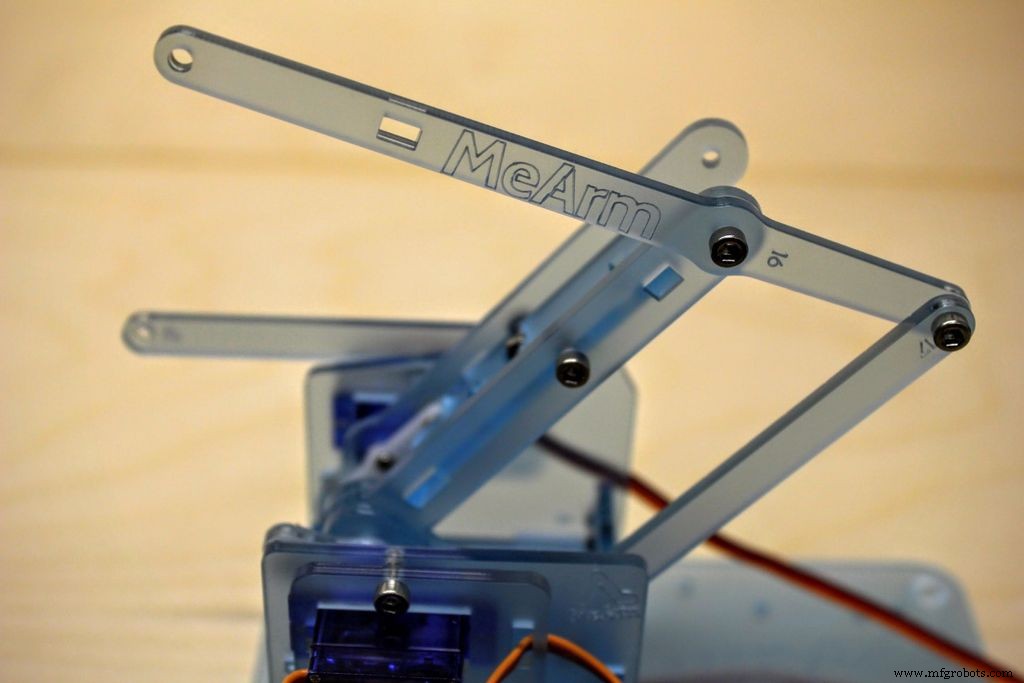
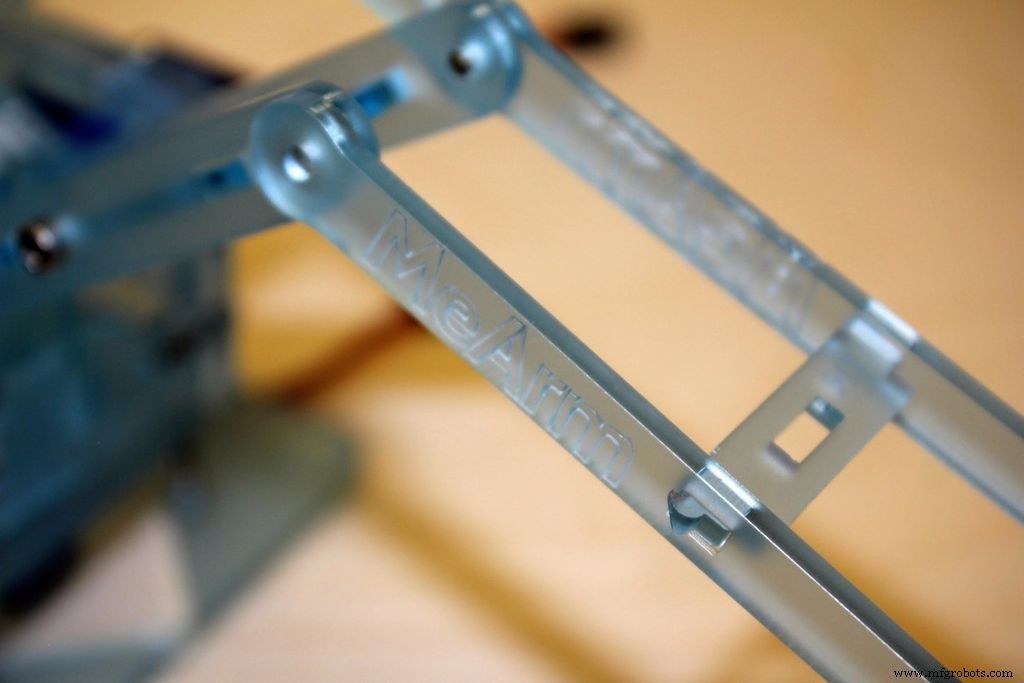
La première chose à faire est d'accrocher la pièce #18 sur la pièce d'avant-bras gauche que vous venez d'attacher puis sur l'avant-bras droit que nous appellerons pièce #31 car il semble qu'elle ne soit pas numérotée !
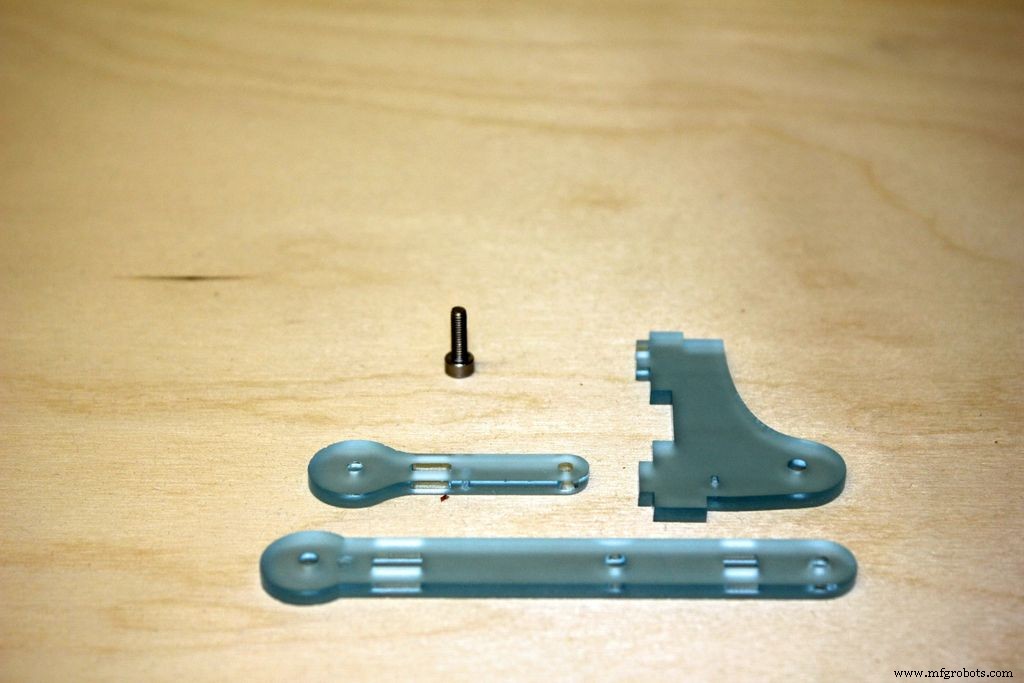
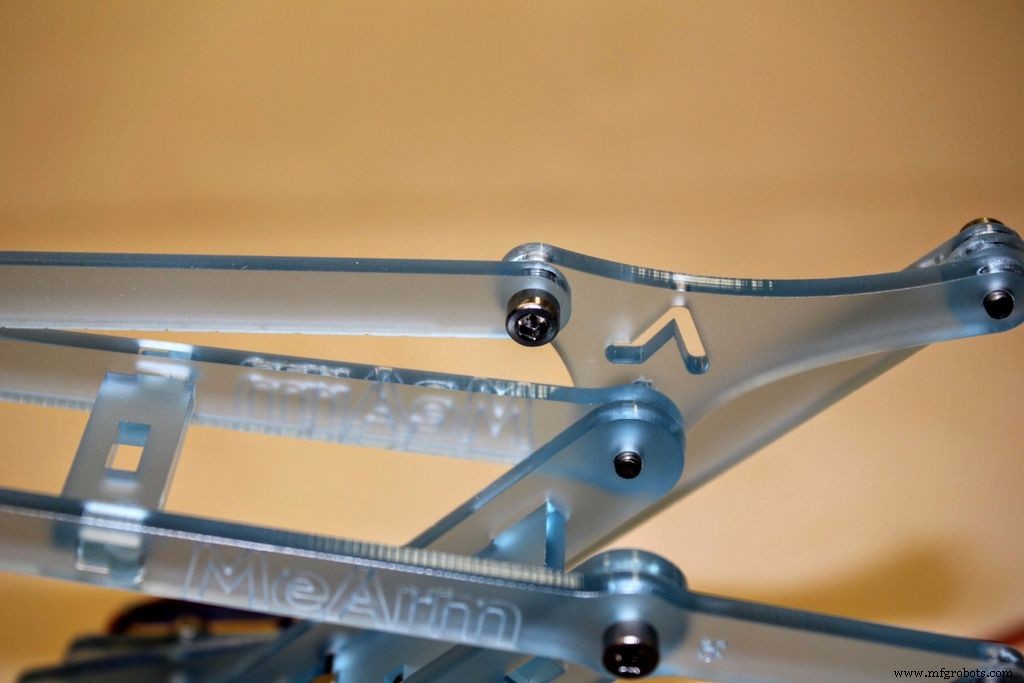
Fixez la pièce triangulaire n°19 à la pièce n°31 et à la pièce n°13 (le bit qui est attaché au servo) avec une vis de 10 mm. Ne serrez pas trop car nous avons besoin que toutes ces pièces bougent librement.
Fixez l'arrière de la pièce n°19 à la pièce n°17 attachée à la plaque latérale droite, utilisez une vis de 10 mm et une entretoise (n°20) entre les deux.
Fixez ensuite la dernière pièce #17 à l'intérieur avant de la pièce #19 avec une vis de 6 mm.
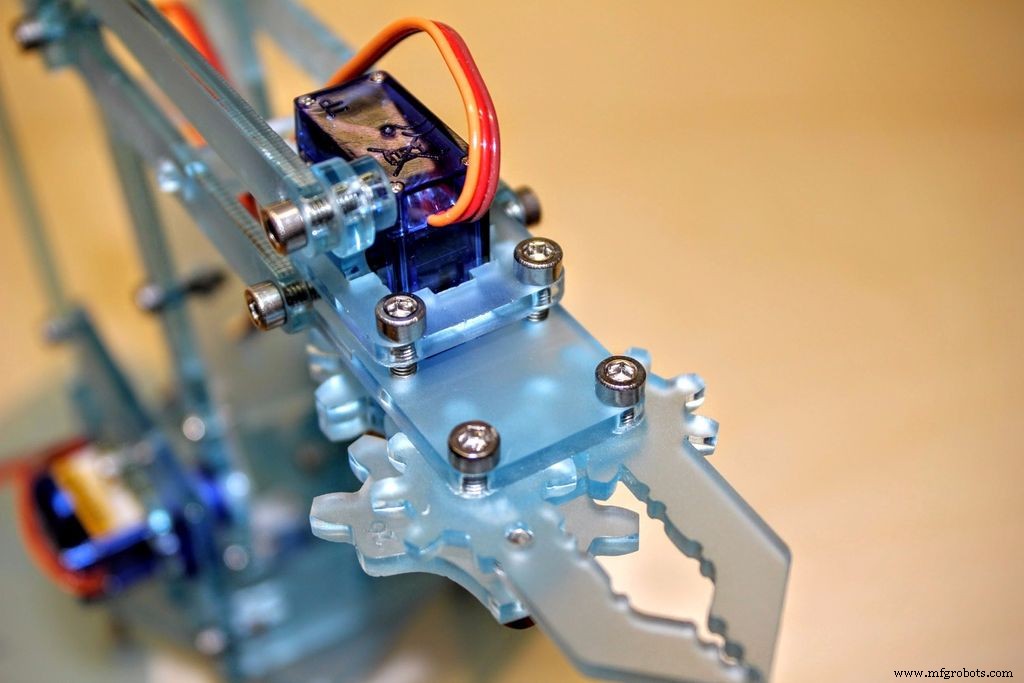
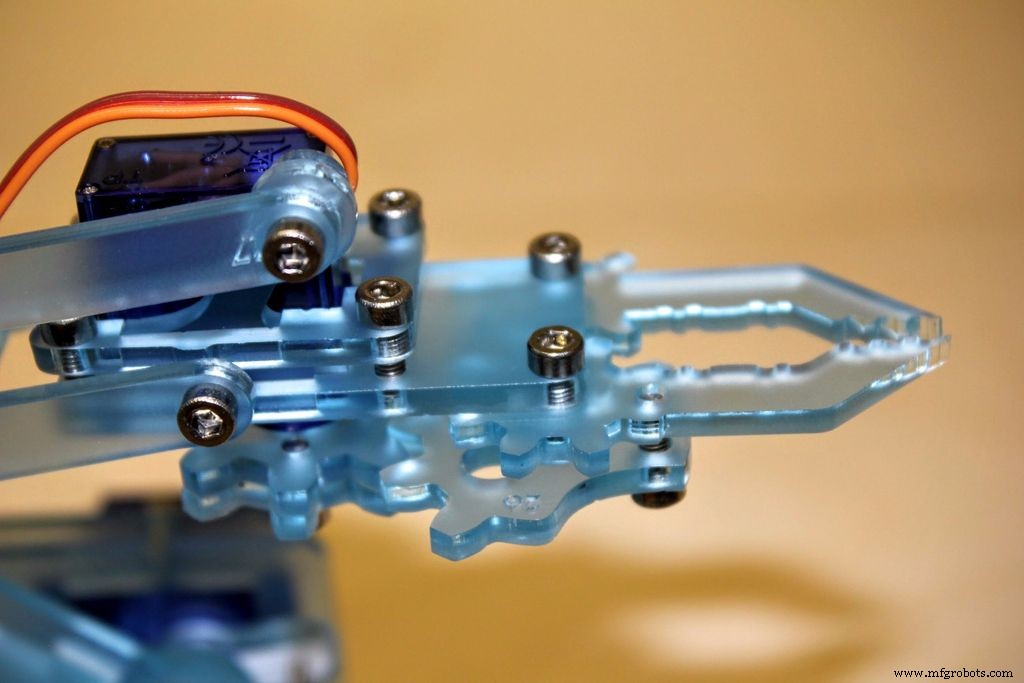
Étape 11 :Construisez la griffe !
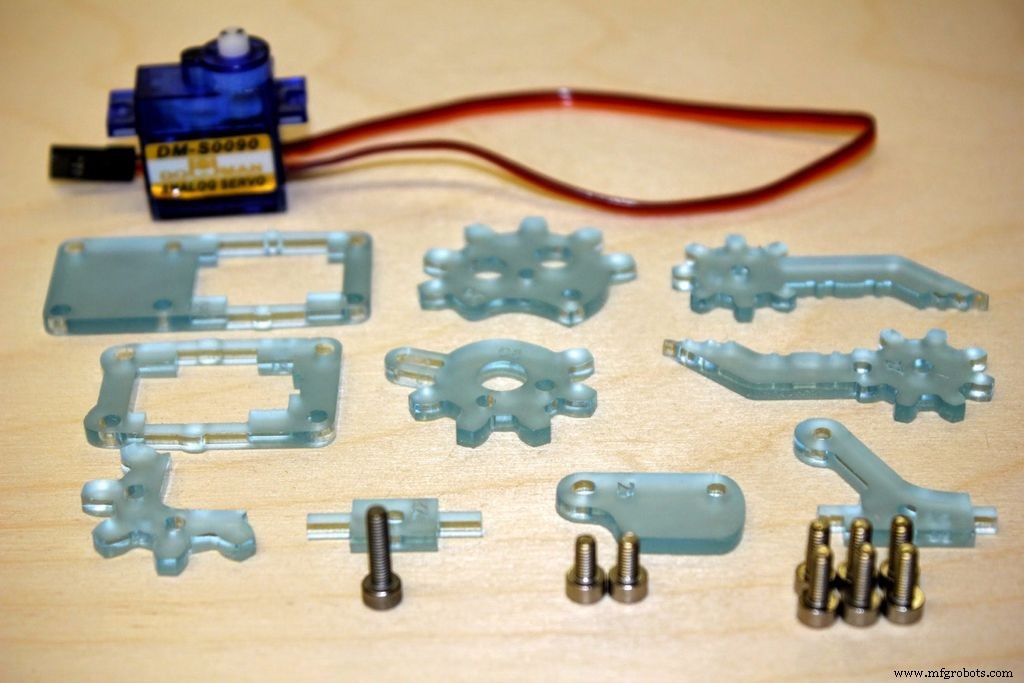
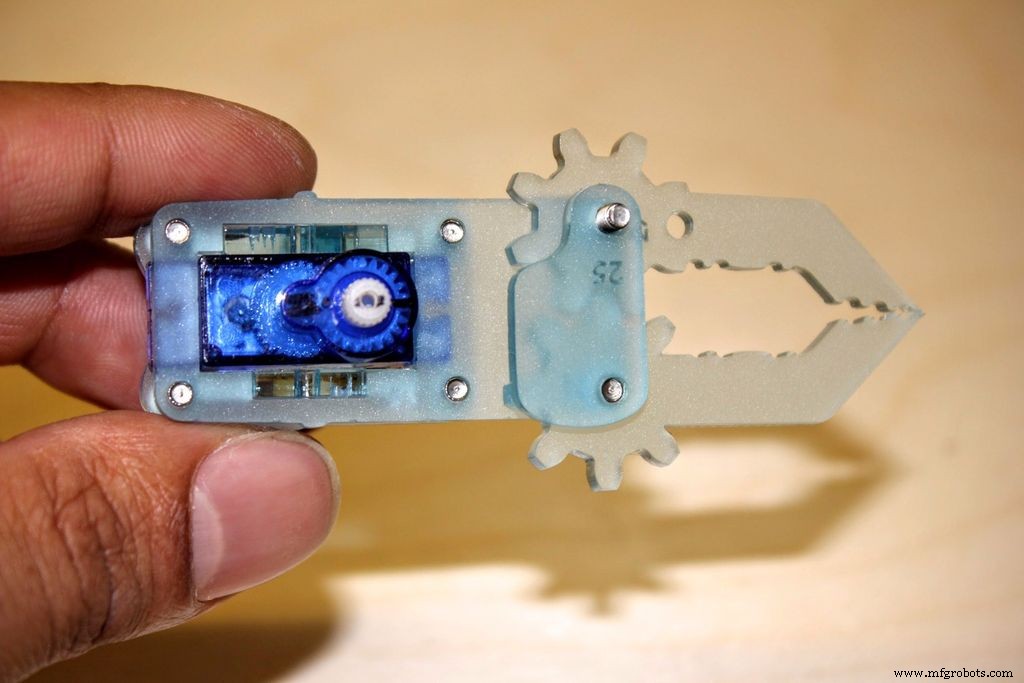
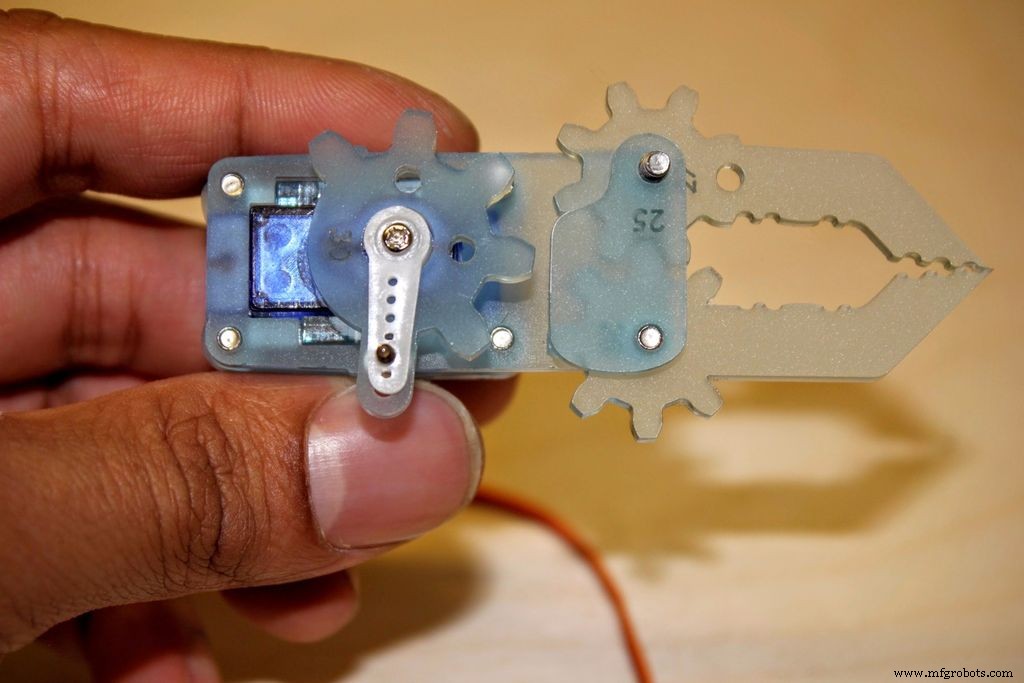
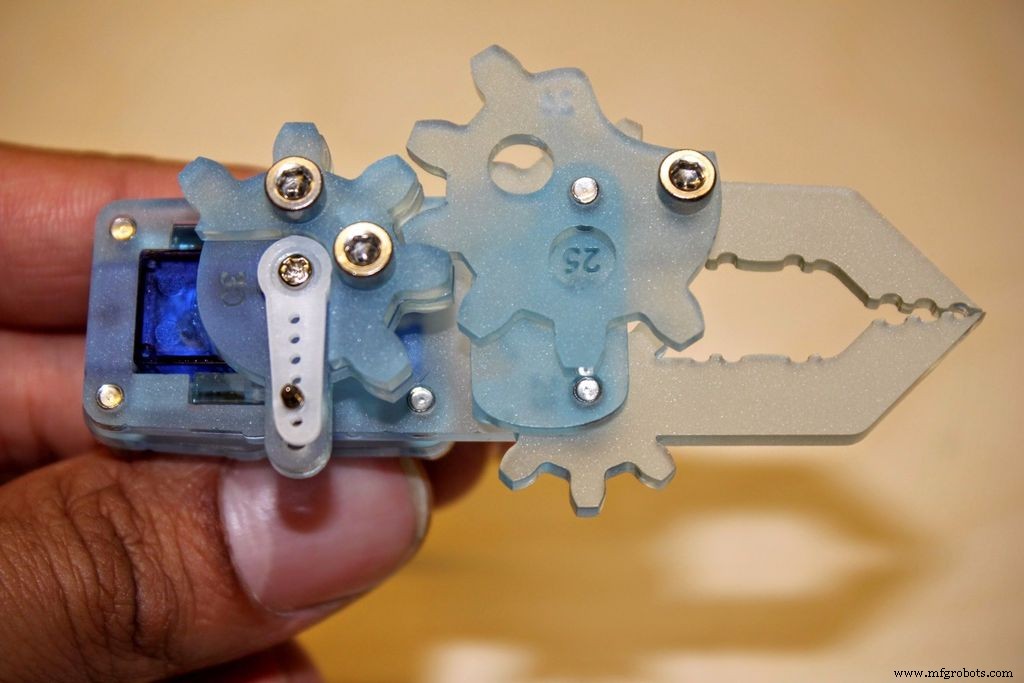
Enfilez le servo dans le collier restant, #21. Insérez les pièces #22 et #23 dans les fentes latérales faites par le servo et la pièce #21, puis à l'aide de la pièce #24, fixez-les avec quatre écrous de 8 mm. Encore une fois attention, nous y sommes presque, vous ne voulez rien casser.
Les pièces suivantes seront un peu non sécurisées jusqu'à ce que la dernière vis soit en place, alors ne vous inquiétez pas si vous laissez tomber quelque chose maintenant. Fixez la pièce #28 à travers le trou de gauche sur l'assemblage de la tête avec une vis de 8 mm dans la pièce #25. Ensuite, engrenez les engrenages sur la pièce #27 et placez une vis de 12 mm à travers elle, l'assemblage de la tête et la pièce #25. Ce ne sera pas encore sécurisé, mais le gardera ensemble.
Attachez un palonnier à la pièce #30 et fixez-le au servo à l'aide de la vis à métaux. Fixez le #29 sur le #30 à l'aide de deux vis de 6 mm.
Vous pouvez maintenant attacher #26 à la vis desserrée de 12 mm et la fixer au trou supplémentaire de la pièce #27 avec une vis de 8 mm.
Étape 12 :Ajoutez la tête
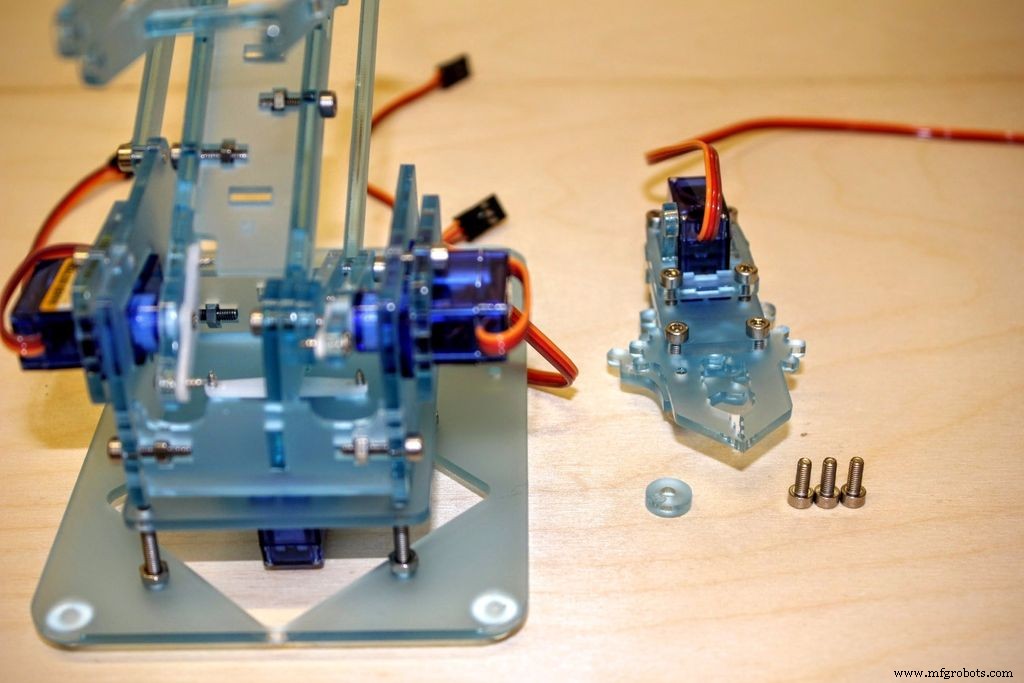
La dernière partie consiste à attacher la tête.
Ceci est fixé par deux vis de 8 mm à travers les avant-bras dans les pièces #22 et #23 sur la tête. Cela peut faciliter le desserrage des vis de 8 mm sur la bride du servo de tête.
Maintenant, allumez et jouez !
Étape 13 :Dépannage
Cette section sera remplie au fil du temps avec des problèmes communs. Si vous en avez un, faites-le nous savoir et nous pourrons l'ajouter.
Le bras de servo gauche semble bloqué. En règle générale, cela est dû à une articulation raide. L'accessoire d'assemblage de tête est celui que les gens oublient.
Code
- Fichier sans titre
Fichier sans titreArduino
#includeServo milieu, gauche, droite, griffe; // crée 4 "objets servo" void setup() { Serial.begin(9600); milieu.attache(11); // attache le servo sur la broche 11 à l'objet du milieu left.attach(10); // attache le servo sur la broche 10 à l'objet gauche right.attach(9); // attache le servo sur la broche 9 à l'objet droit claw.attach(6); // attache le servo sur la broche 6 à l'objet griffe} void loop() { middle.write(90); // définit la position du servo en fonction de la valeur (degrés) left.write(90); // fait la même chose right.write(90); // et encore claw.write(25); // oui vous l'avez deviné delay(300); // ne met pas constamment à jour les servos qui peuvent les griller}
Codebender
https://codebender.cc/sketch:148456Pièces et boîtiers personnalisés
Processus de fabrication
- Robot portique :automatisez vos plus grandes applications
- Livre blanc :Comment trouver le potentiel de votre robot
- L'importance de la sécurité des robots dans votre usine
- Construire votre propre bras robotique :devez-vous prendre le risque ?
- Robot SCARA à double bras
- Arme de robot contrôlée via Ethernet
- Webinaire :Automatisez votre processus avec Techman Robot
- Centre de tournage équipé d'un bras robotisé
- Le robot associe un bras robotisé collaboratif à une plate-forme mobile