


Kravox ! Instrument sans fil, à détection de mouvement et tactile
Composants et fournitures
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 5 | ||||
 |
| × | 2 | |||
| × | 2 | ||||
 |
| × | 3 | |||
| × | 5 | ||||
| × | 3 | ||||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Outils et machines nécessaires
 |
| |||
| ||||
| ||||
| ||||
| ||||
| ||||
| ||||
 |
| |||
|
Applications et services en ligne
 |
| |||
|
À propos de ce projet
Un nouveau Type d'instrument
Kravox a été créé dans le cadre d'un projet de recherche à l'Université de Lund (Suède) dans le but de donner aux contrôleurs d'instruments de musique numériques la sensation d'instruments mécaniques conventionnels.
Kravox doit maintenant être rendu accessible à tous et servir de plate-forme d'expérimentation musicale. Ce tutoriel détaillé a donc été créé pour permettre au plus grand nombre d'utiliser ce nouvel instrument passionnant !
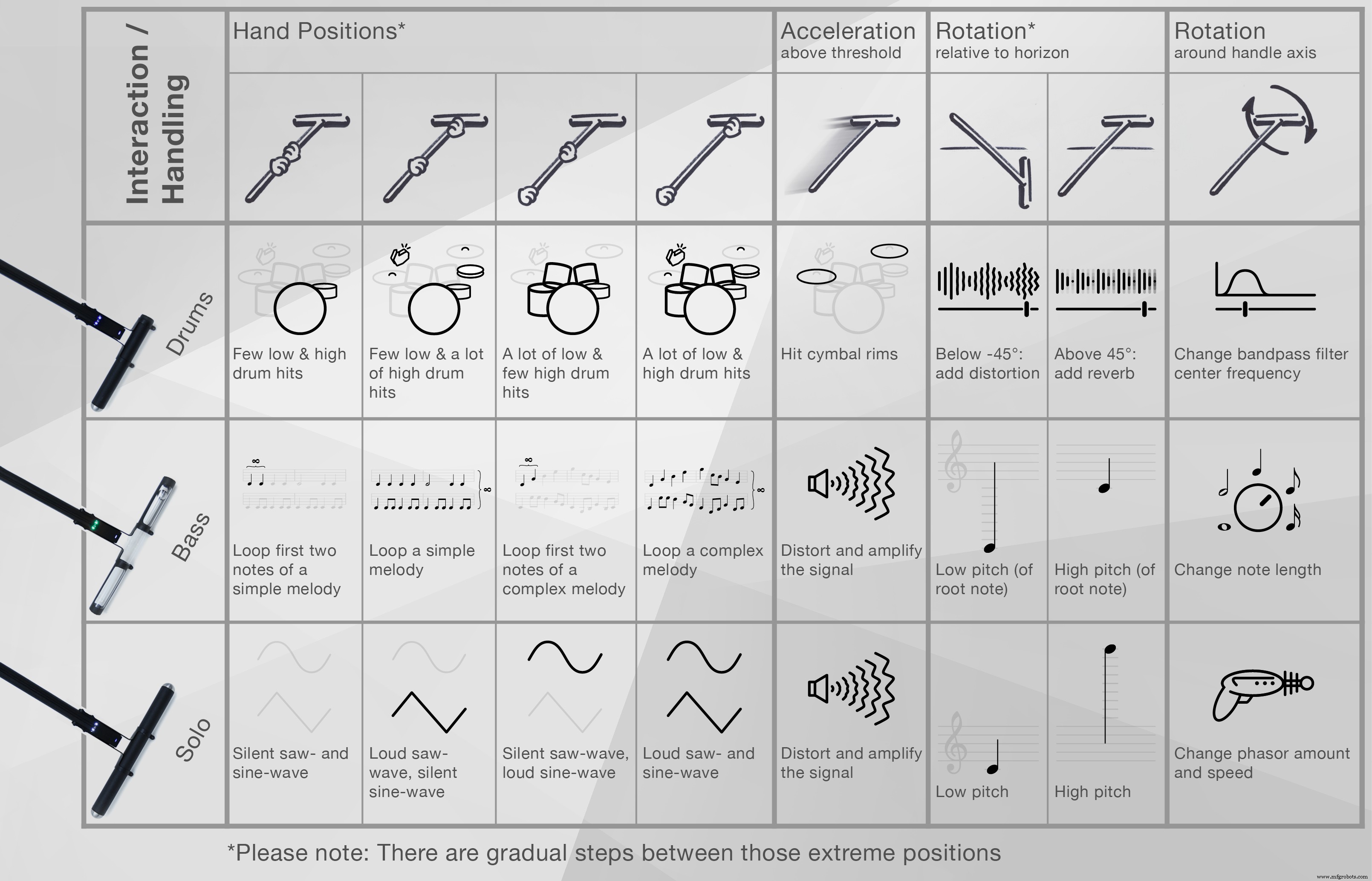
Comment jouer à Kravox
Jouer à Kravox est tout aussi simple. Imaginez simplement que vous jouez avec un objet ordinaire comme un balai et que la façon dont vous le touchez et le déplacez dans l'espace contrôle la façon dont le son est généré. Découvrez et écoutez comment jouer à Kravox dans cette vidéo.
Qu'est-ce que Kravox ?
Kravox est un instrument de musique numérique open source compatible multiplateforme qui se compose de trois composants :contrôleur(s), récepteur et logiciel.

Contrôleur(s)
Jusqu'à trois contrôleurs sans fil peuvent être connectés. Chaque contrôleur traite les données d'orientation et d'accélération d'un gyroscope numérique MPU-6050 et les données tactiles de deux cartes de capteurs tactiles MPR121 connectées à un Arduino Nano. Le ou les contrôleurs envoient les données à un périphérique récepteur via le ou les émetteurs-récepteurs radio nRF24L01.
Si plusieurs contrôleurs doivent être utilisés, les deuxième et troisième contrôleurs doivent se voir attribuer des adresses individuelles. Pour plus d'informations sur l'attribution de l'adresse, voir les informations dans la section DÉCLARATIONS / NRF24L01 du code du contrôleur.
Récepteur
Le récepteur transmet les données reçues du ou des contrôleurs via USB à un ordinateur connecté, ainsi que les données collectées à partir de plusieurs potentiomètres. Le code de l'appareil récepteur fourni permet la communication avec jusqu'à trois contrôleurs, mais fonctionnera également avec seulement un ou deux sans réglages.
Logiciel
Les données du récepteur sont traitées dans un programme écrit en Pure Data Vanilla qui produit du son.
Ce que nous allons construire dans ce didacticiel - Guide pas à pas

La beauté de Kravox est que sa forme, son son et la façon dont il est joué peuvent être ajustés. Cela m'a donné l'opportunité de concevoir une version de Kravox facile à reproduire pour ce tutoriel.
(Au cas où vous seriez curieux :sur ma chaîne YouTube, vous pouvez également trouver un timelapse de la façon dont j'ai fait la version plus grande de Kravox)
La vidéo ci-dessus et ce didacticiel vous montreront toutes les étapes nécessaires pour créer des contrôleurs entièrement fonctionnels et un récepteur à partir de composants électriques et de carton facilement disponibles.
Partie 1 - Rassembler des composants et des outils
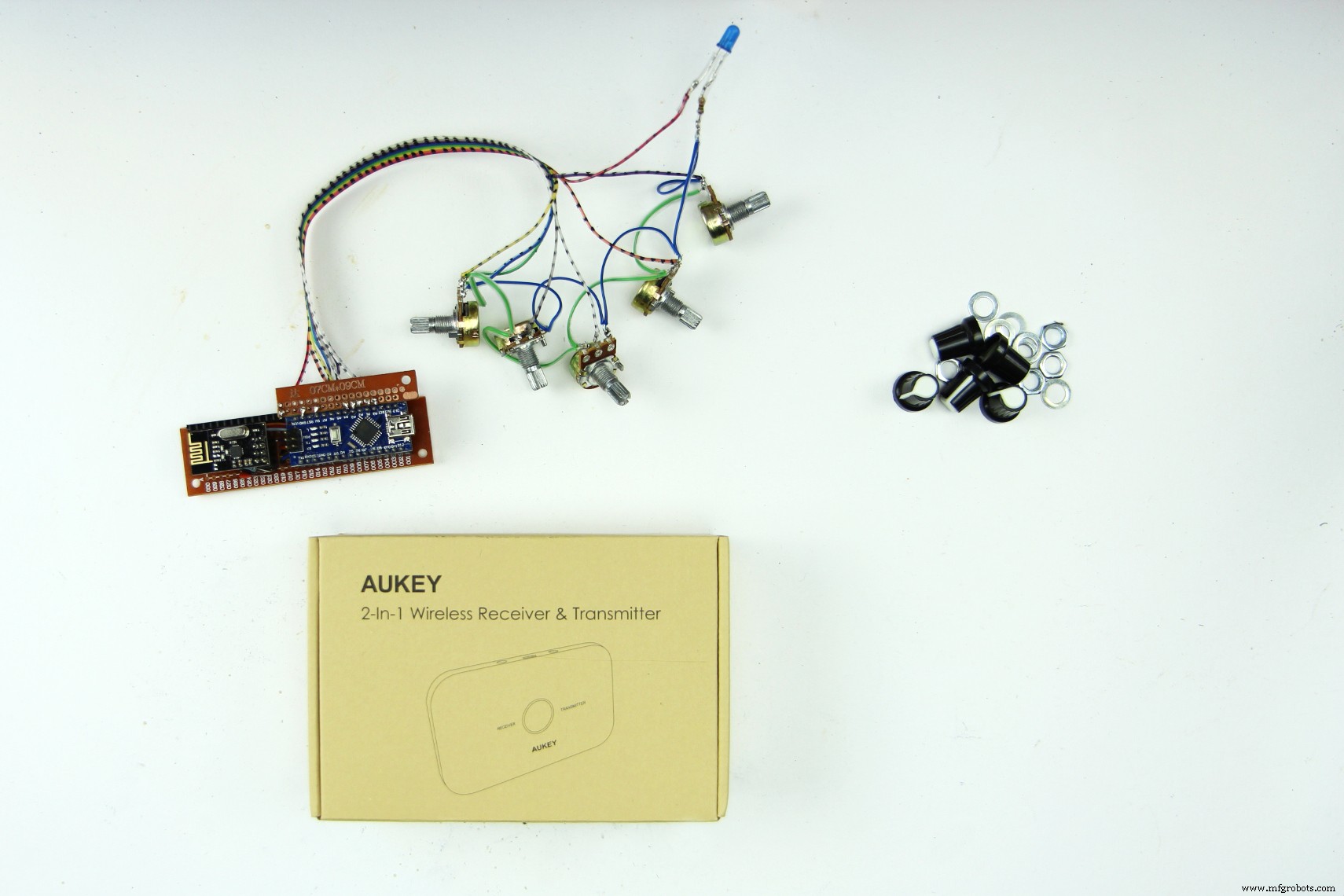
Vous aurez besoin des composants suivants pour construire un contrôleur Kravox + une station de réception :

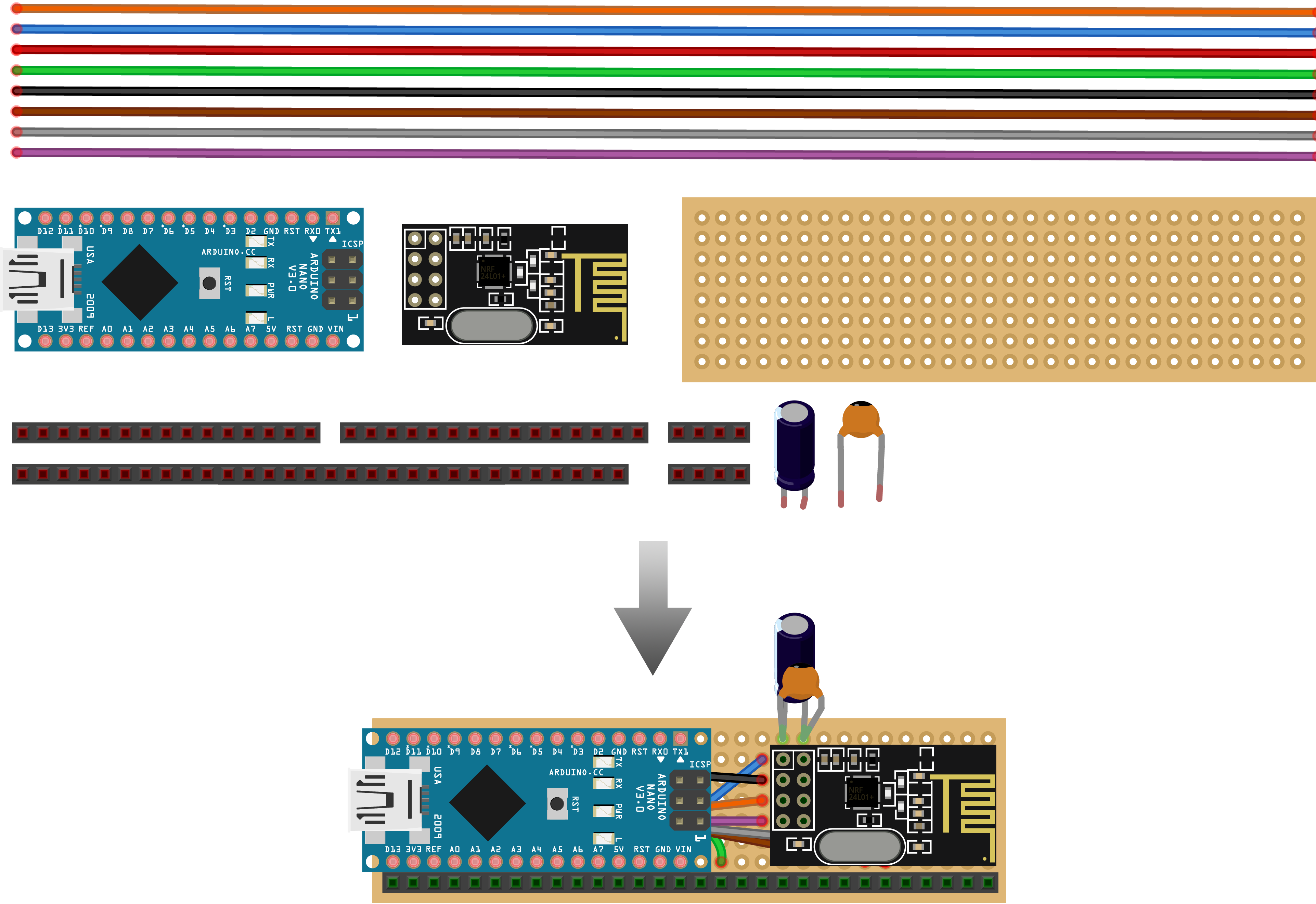
{1x} 50 * 24 trous (taille minimale) Perfboard, {5x} embases femelles 40 broches, {5x} embases mâles 40 broches, {5x} potentiomètres 10 kilo-ohms et boutons pour eux, {3x} standard bleu 5 mm LED, {3x} résistances 150 Ohm, {2x} 10 condensateurs micro-farad, {2x} 100 condensateurs nano-farad, {2x} émetteurs-récepteurs radio NRF24L01, {2x} nanos Arduino, {3x} résistances 220 Ohm, {2x} Cartes à capteur tactile MPR121, {1x} gyroscope numérique GY-521 MPU 6050, {2x} câbles USB-A vers USB-C, {1x} 4 mètres (minimum) de ruban de cuivre de 1 cm de large, {1x} powerbank, {2x } 7 mètres (minimum) de fil dans de nombreuses couleurs et en option {1x} 0,2 mètres de gaine thermorétractable ø=3mm.
De plus, vous avez besoin d'outils pour assembler les composants :
et plus tard aussi des cartons vides ou similaires :

Et de la colle, un pistolet à colle, du ruban adhésif, une ou plusieurs pinces et élastiques pour faire les enclos :

Partie 2 – Fabrication de la carte contrôleur
Ensuite, j'expliquerai comment fabriquer l'électronique du contrôleur étape par étape à partir des pièces mentionnées ci-dessus
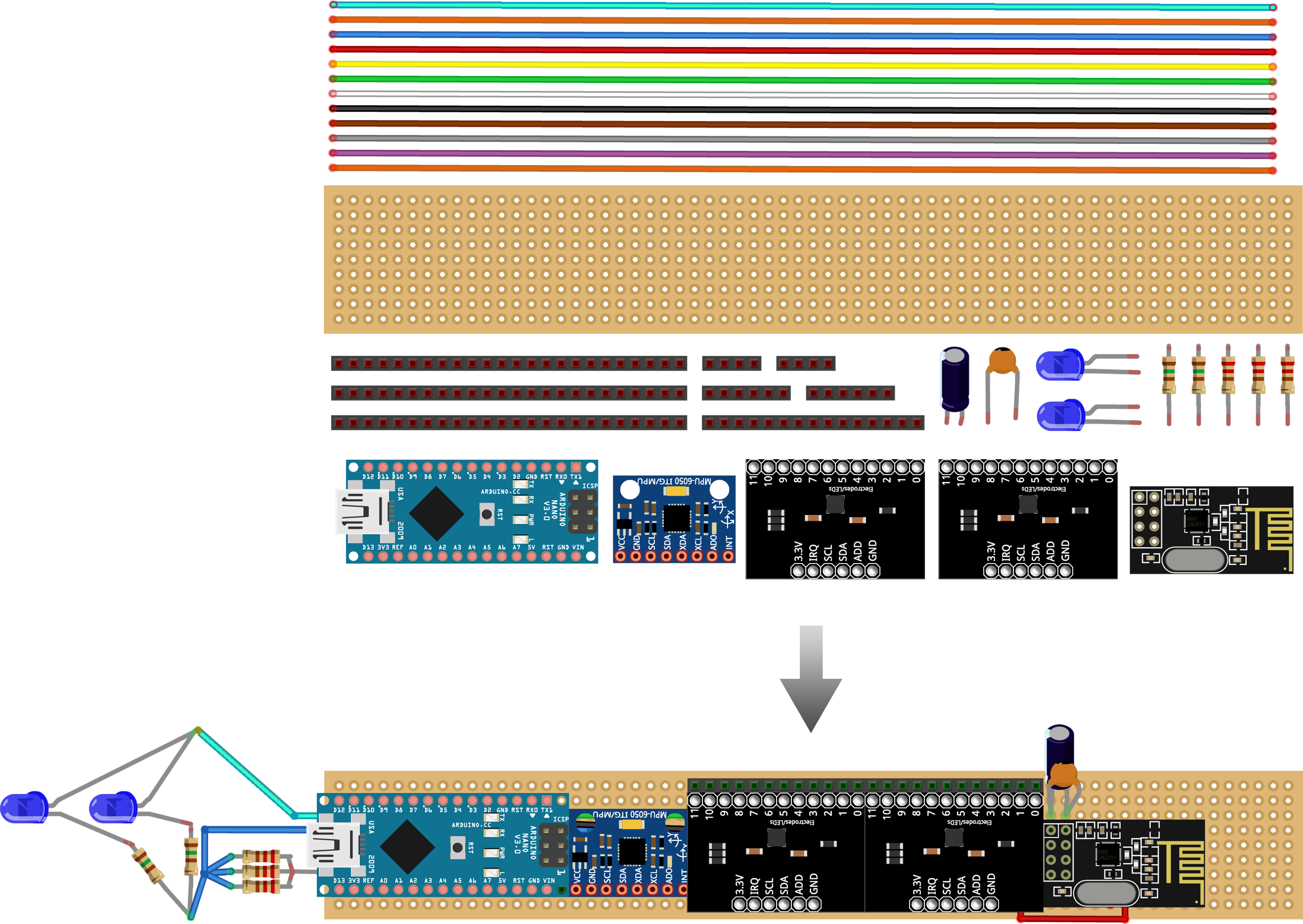
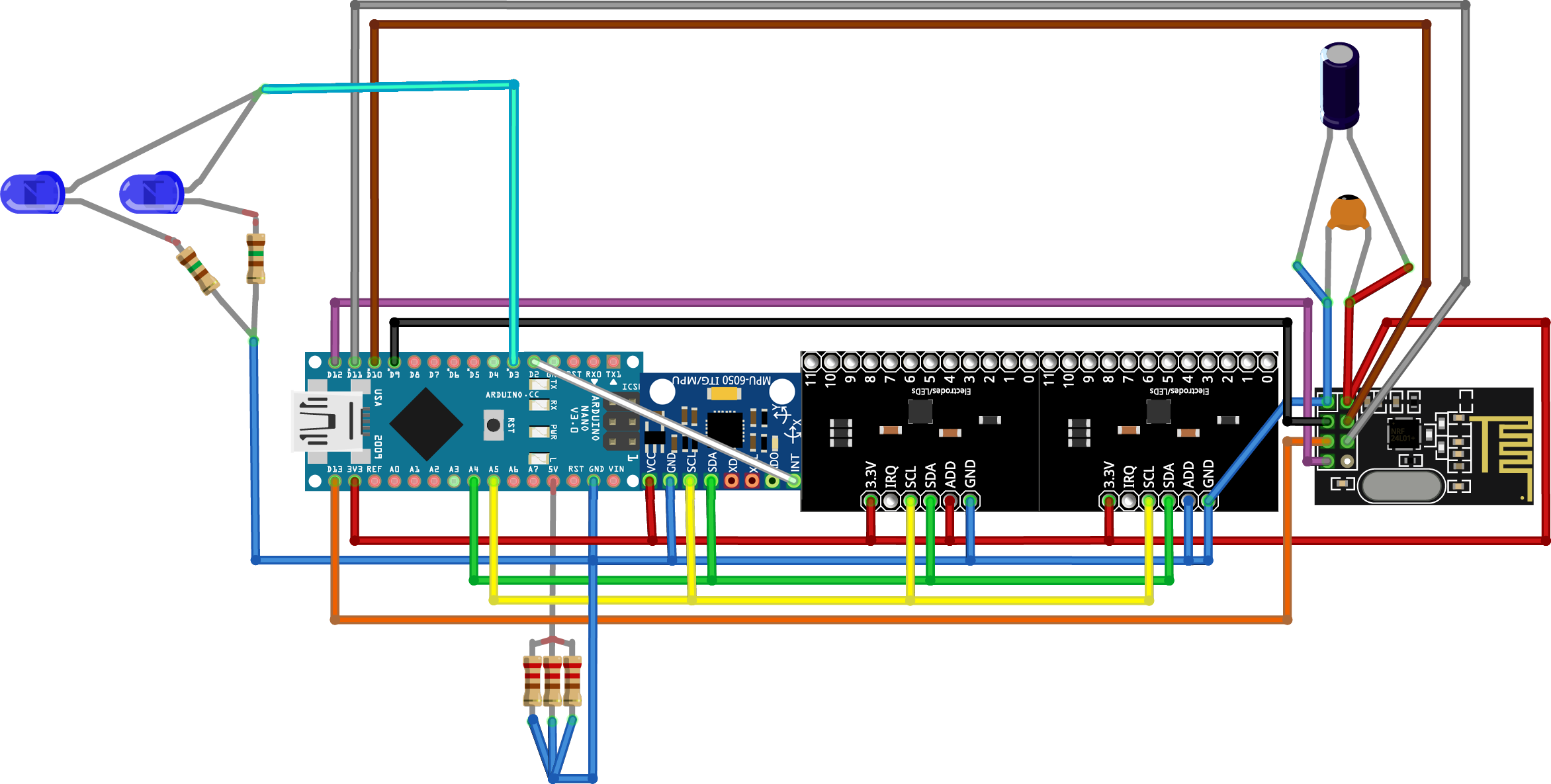
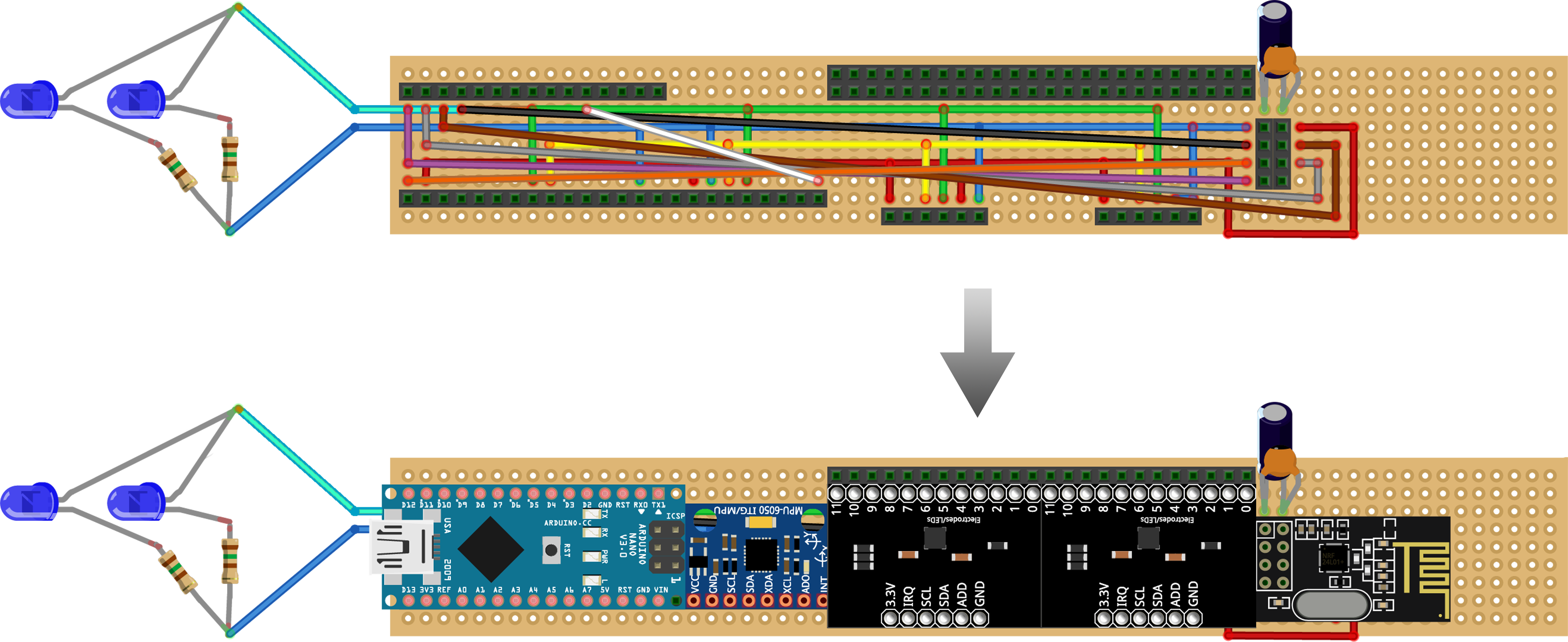
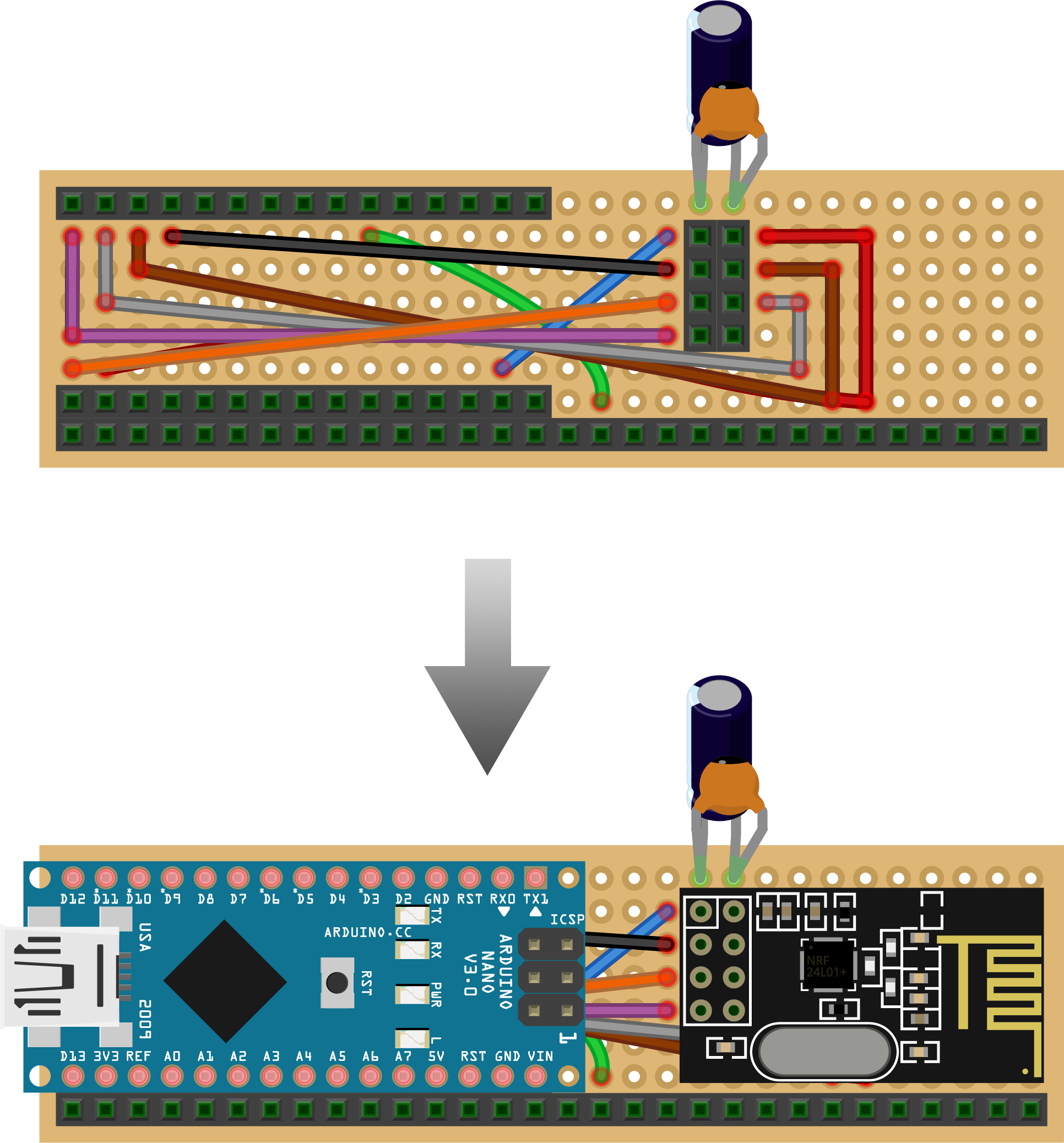
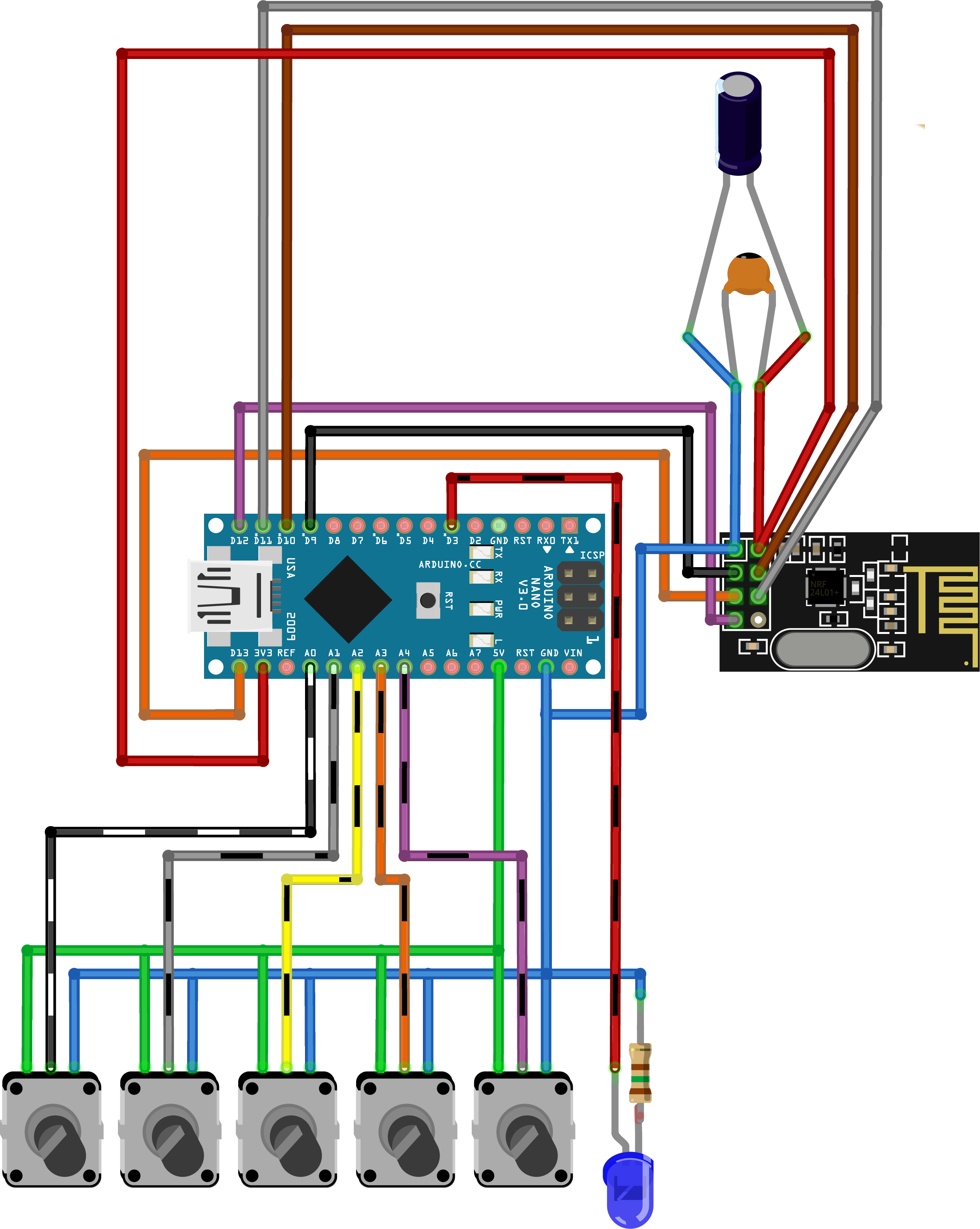
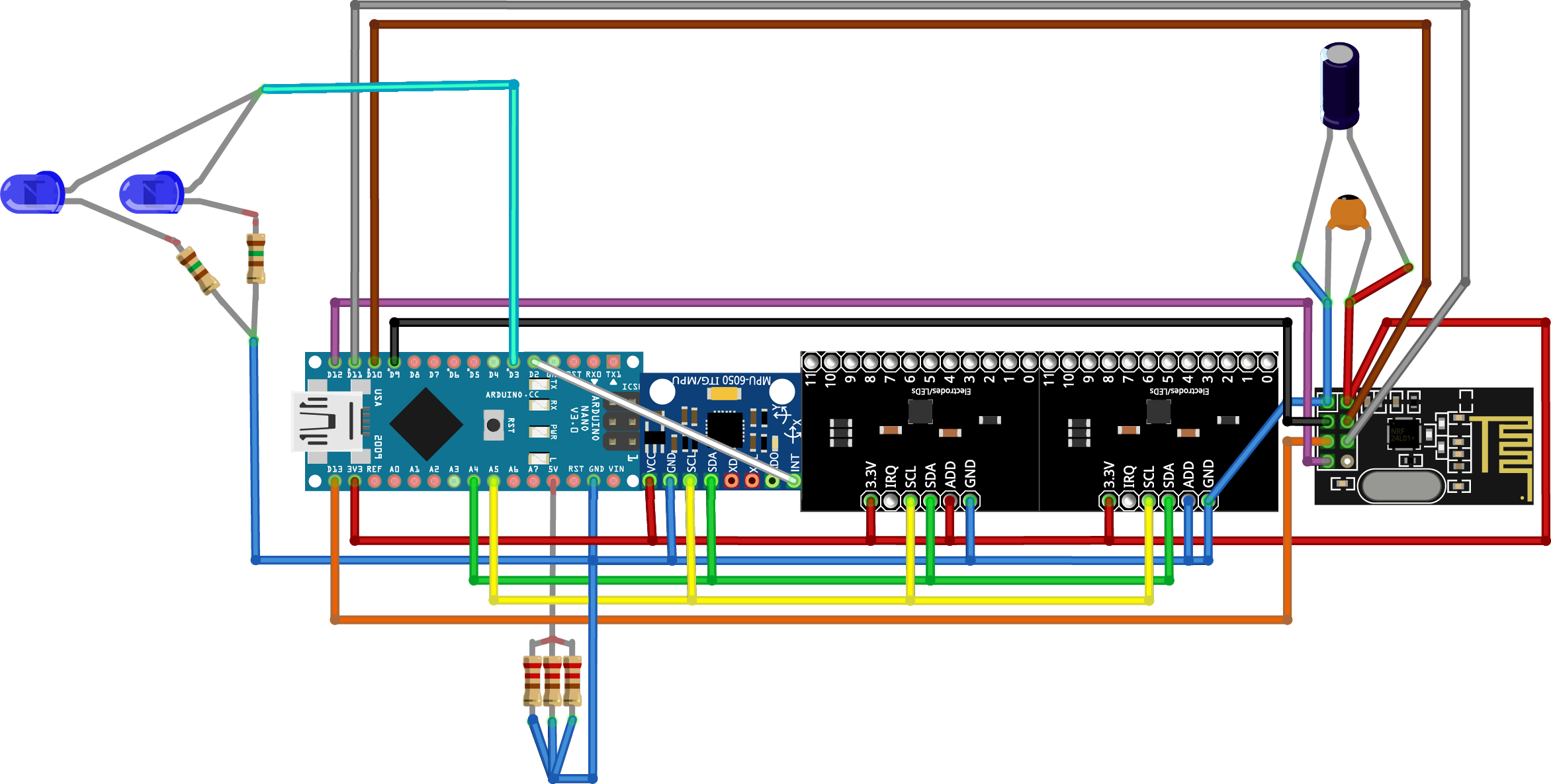
En cas de doute, où souder un câble, vous pouvez toujours revenir au schéma de circuit ci-dessous et vérifier si les composants seront correctement connectés, une fois que vous aurez attaché les cartes arduino et capteurs à la carte de circuit que nous créons.
2.1
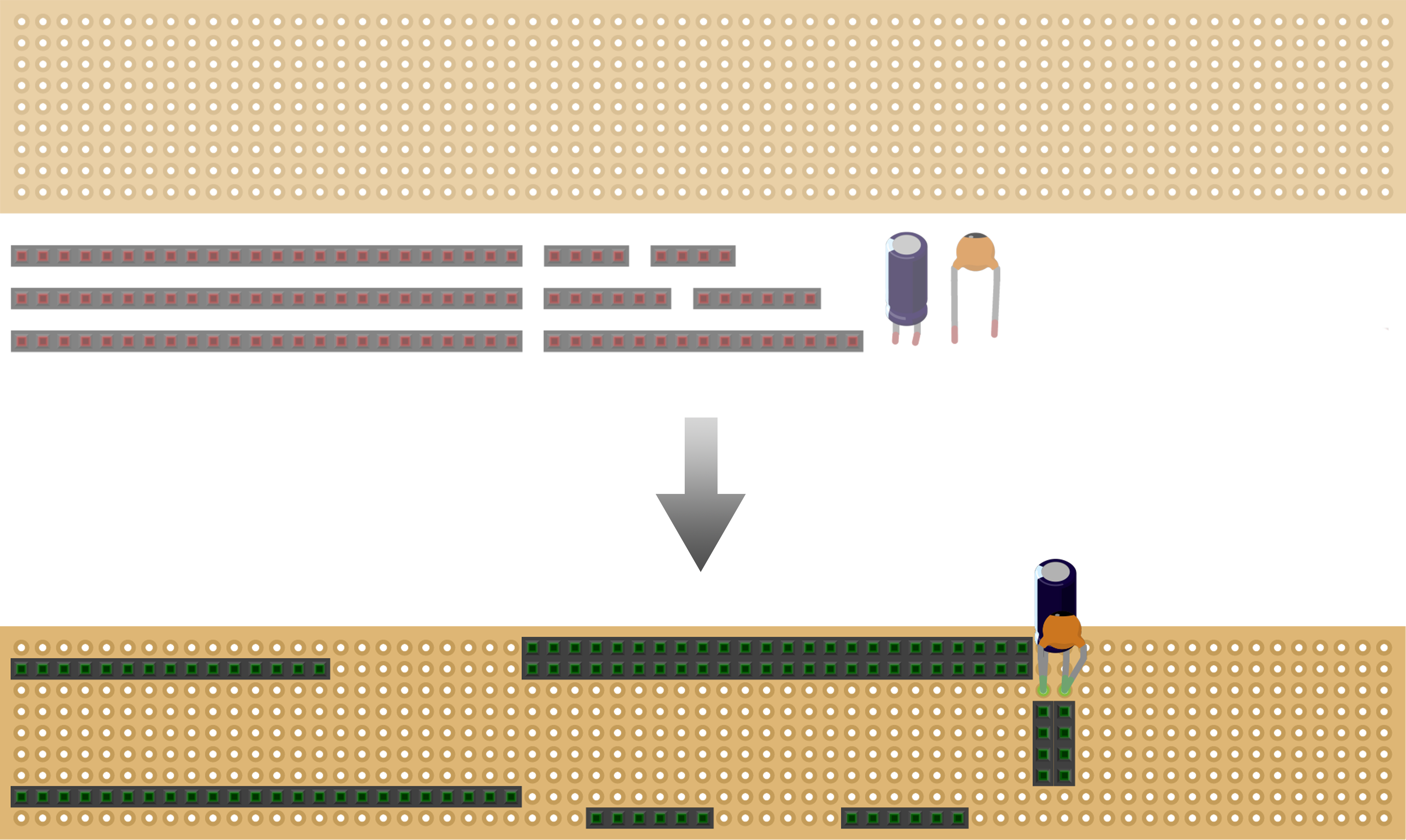
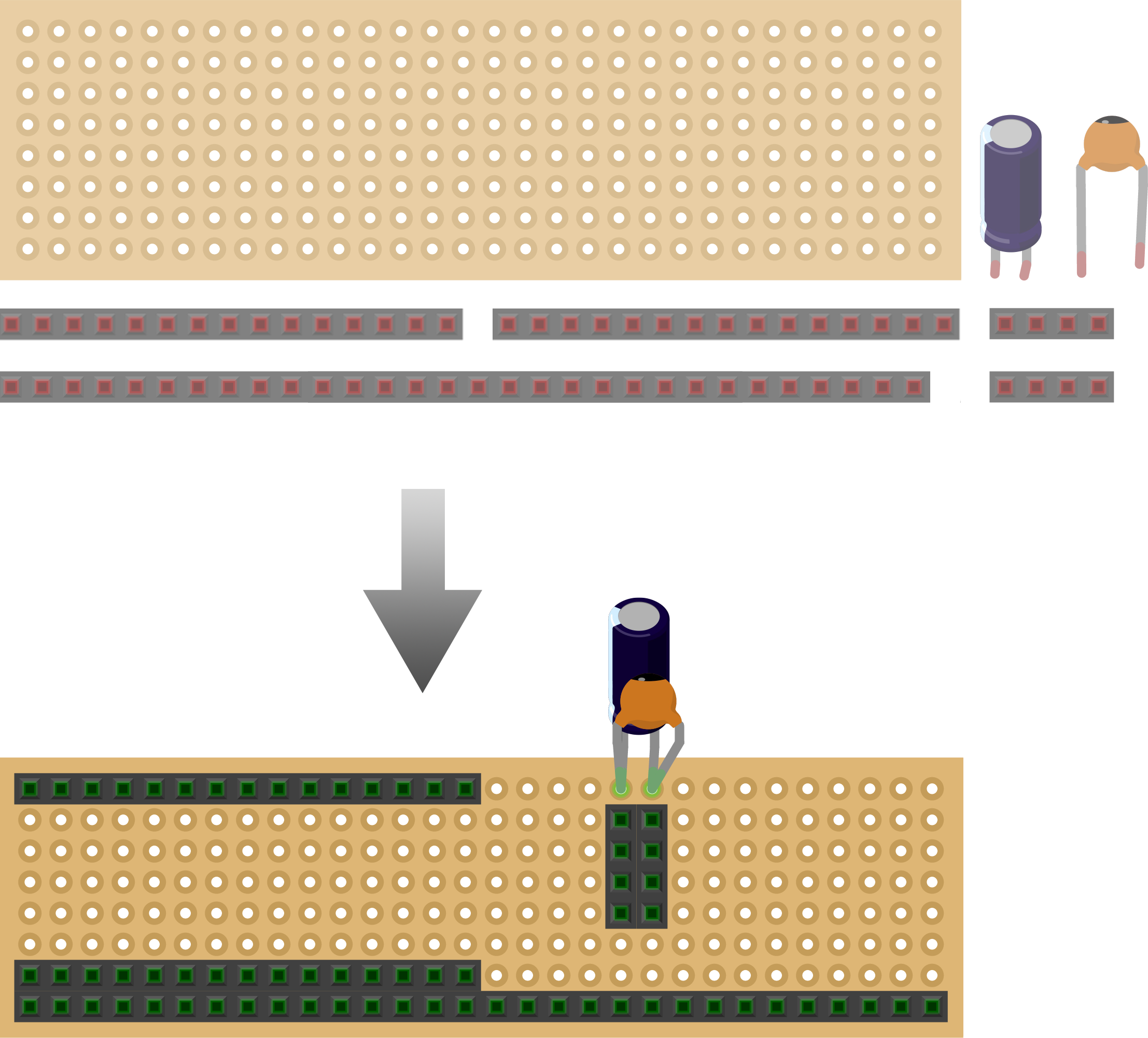
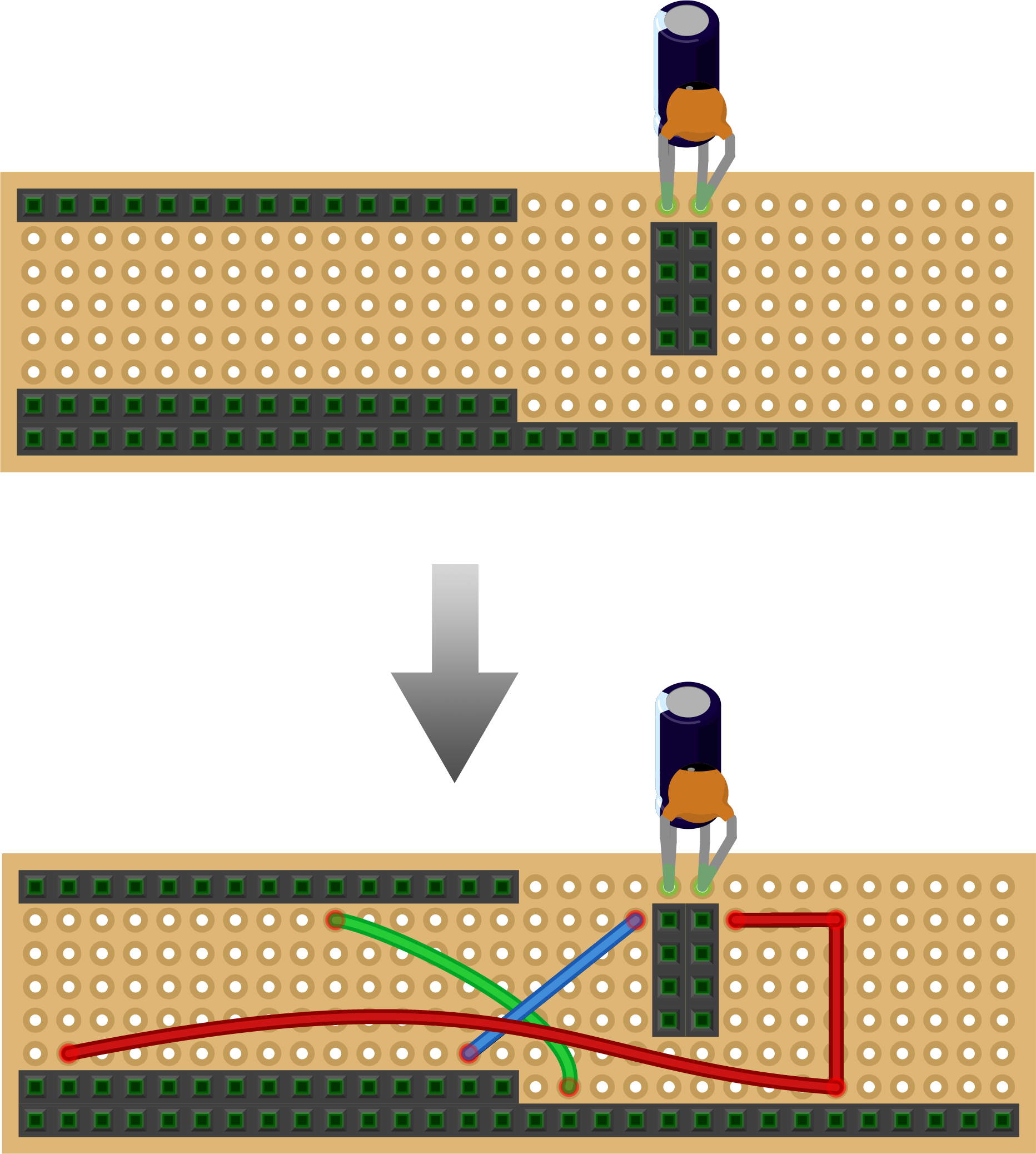
La première étape consiste à couper le panneau perforé et les embases femelles à la bonne taille et à les assembler avec un petit et un grand condensateur qui contribuent à augmenter la fiabilité de l'émetteur-récepteur radio :
Coupez le panneau perforé avec un couteau tout usage :

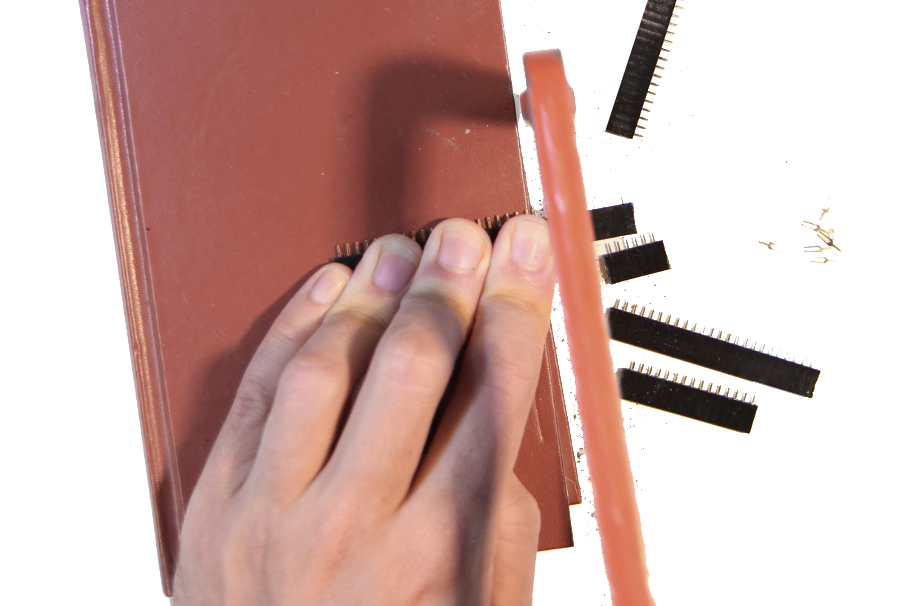
Coupez les en-têtes des broches femelles avec une scie sauteuse (je les ai mis sur un livre pour les mettre à niveau depuis la table) :
Soudure dans les pièces. Vous pouvez déjà connecter chaque paire de broches des deux longs connecteurs femelles qui se trouvent l'un à côté de l'autre. Pour les en-têtes restants, il suffit de les attacher simplement avec un peu de soudure - de préférence les broches qui n'auront, selon le schéma de circuit, aucune connexion plus tard de toute façon. Lors de la soudure des condensateurs, faites attention à la polarité du condensateur électrolytique de 10 micro-farads (le plus gros des deux). Un côté aura une rayure et généralement aussi une jambe plus courte. Ce côté doit être relié à la terre. Le plus petit condensateur 100 nano-farad n'est pas polarisé et peut être soudé dans les deux sens.
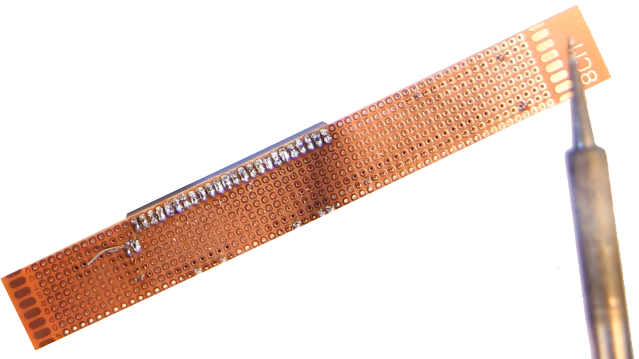
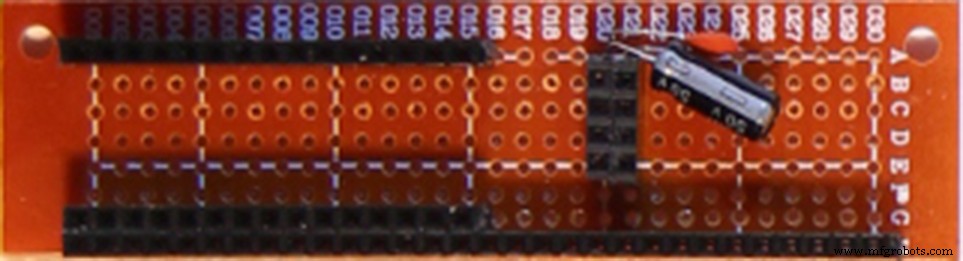
Le résultat devrait ressembler à ceci :

2.2
La deuxième étape consiste à souder les deux LED avec leurs résistances de limitation de courant.
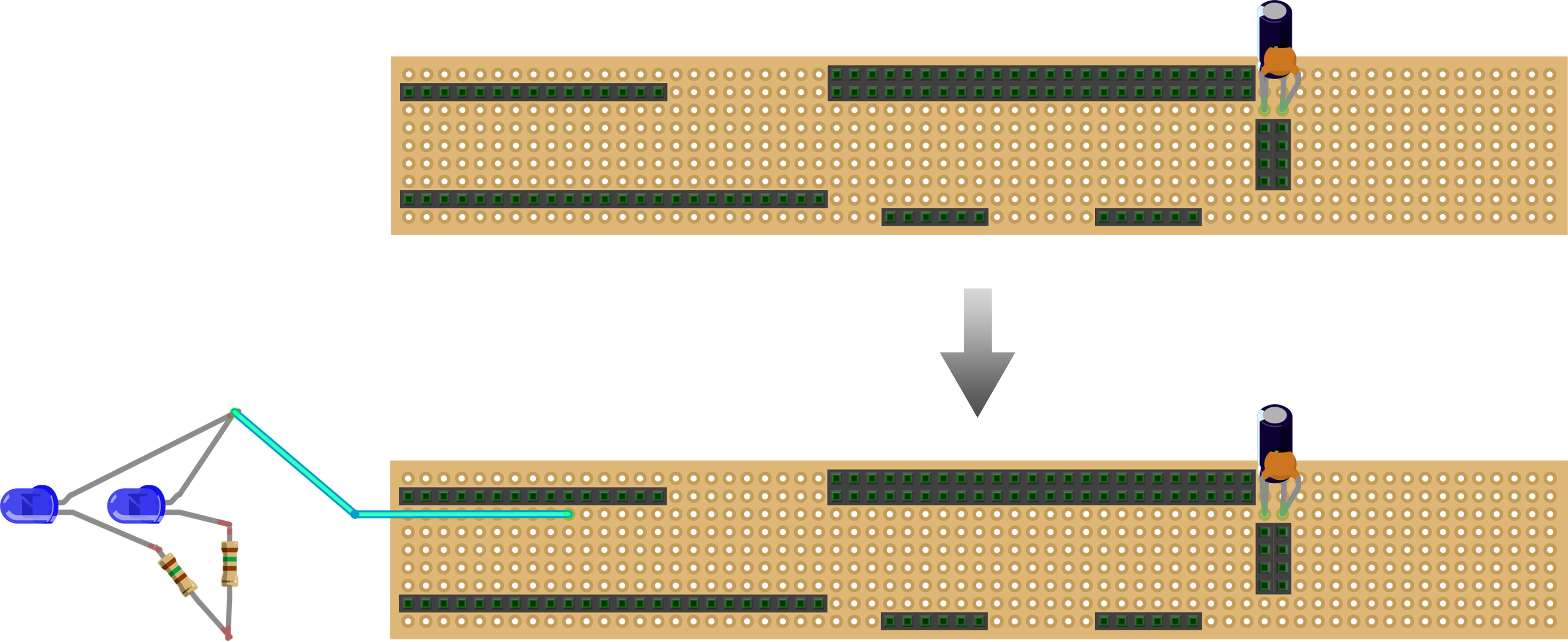
Faites attention à la polarité de la LED :un côté est aplati et aura généralement aussi une jambe plus courte. Ce côté doit être connecté à la terre à l'étape 2.3. De l'autre côté, nous allons maintenant nous connecter avec un câble de couleur cyan à la prise où la broche Arduino D3 reposera plus tard lorsqu'elle sera branchée :
2.3
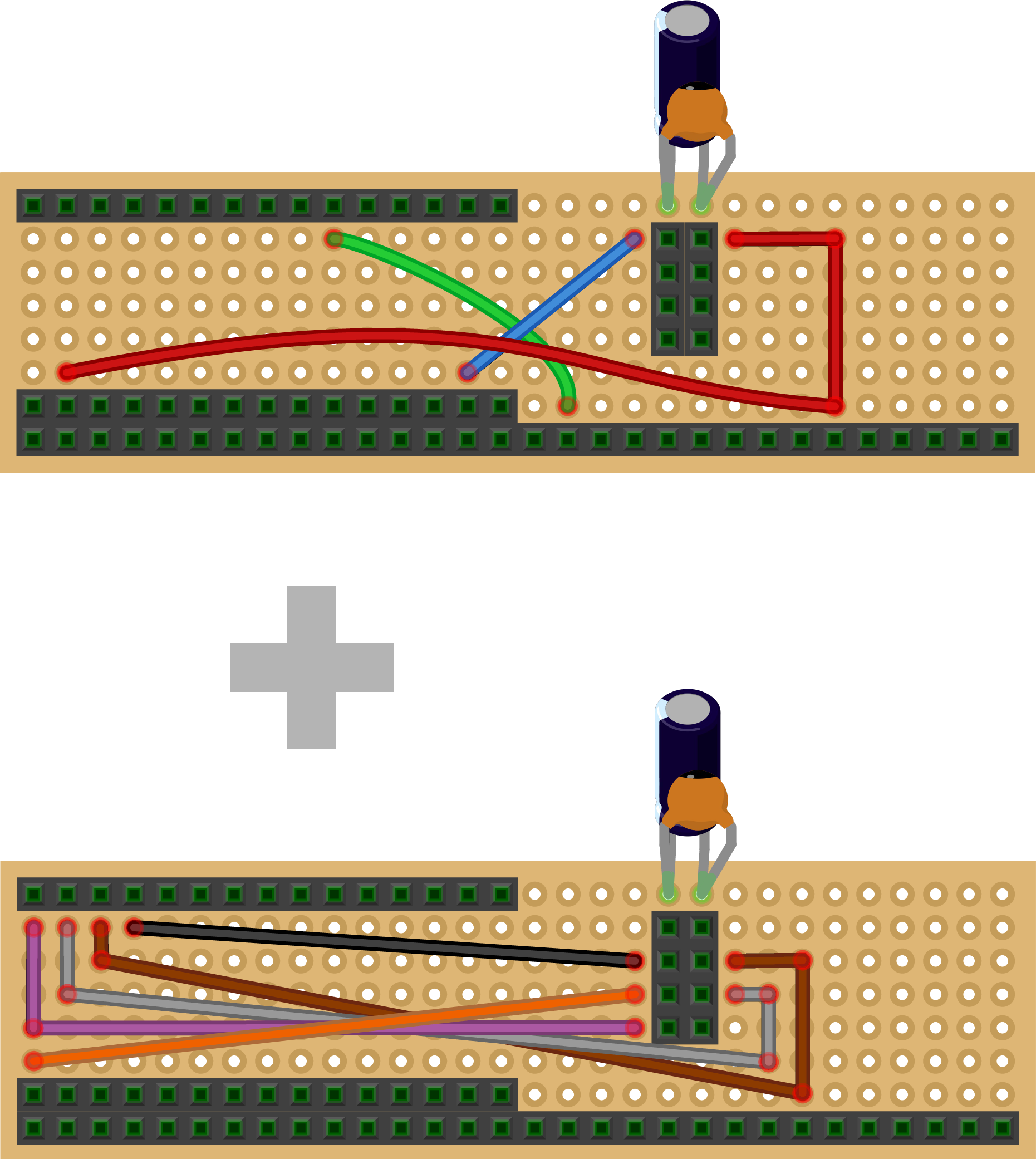
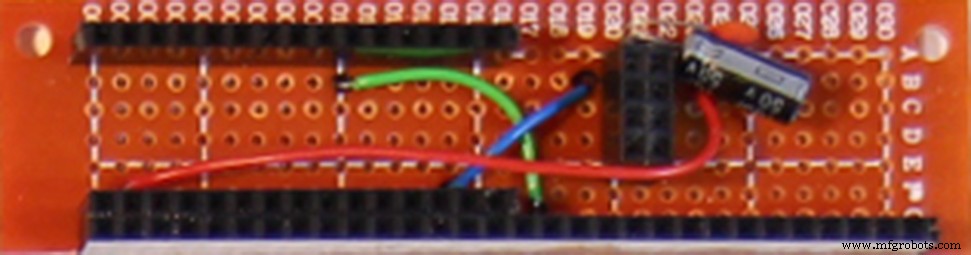
Ensuite, nous ajoutons tous les câbles d'alimentation rouge et bleu. Le rouge correspond à 3,3 V et le bleu à la masse (GND)
Le résultat devrait ressembler à ceci :
2.4
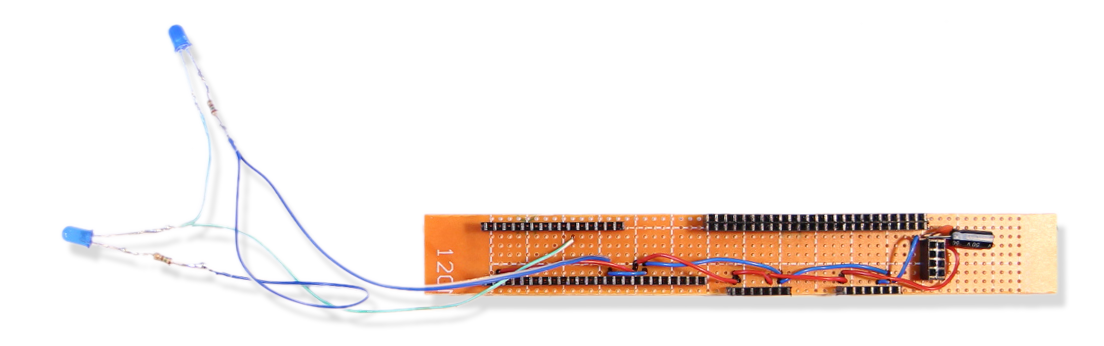
Dans la quatrième étape, il y a déjà un peu de monde sur le plateau. Les trois cartes de capteurs communiquent via le protocole I2C (circuit inter-intégré). Cela signifie qu'ils peuvent tous être connectés aux deux mêmes broches Arduino, nous soudons donc des câbles jaunes et verts entre eux et les broches Arduino A4 et A5. Nous ajoutons également un câble blanc pour la connexion de la broche d'interruption du gyroscope.
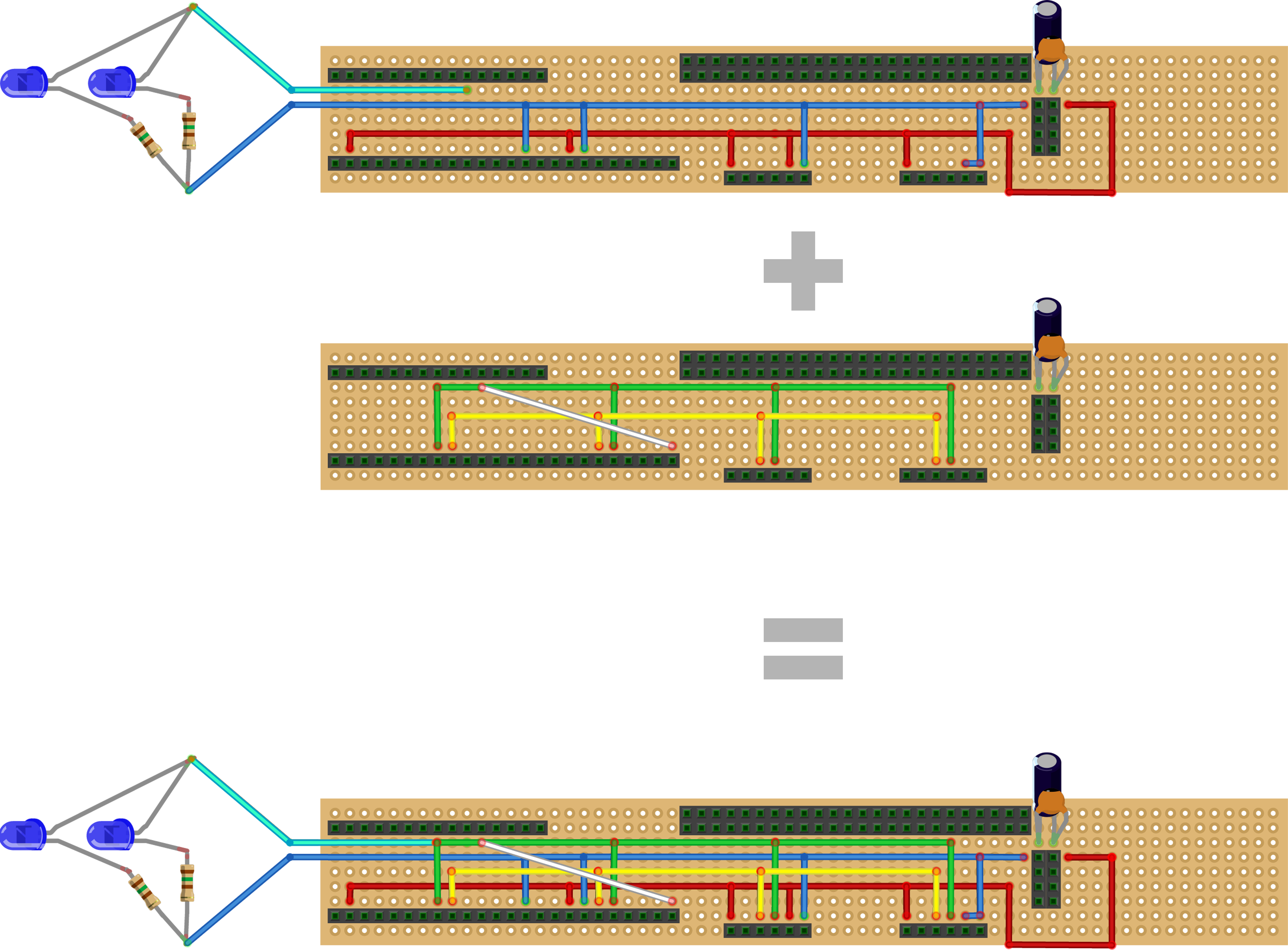
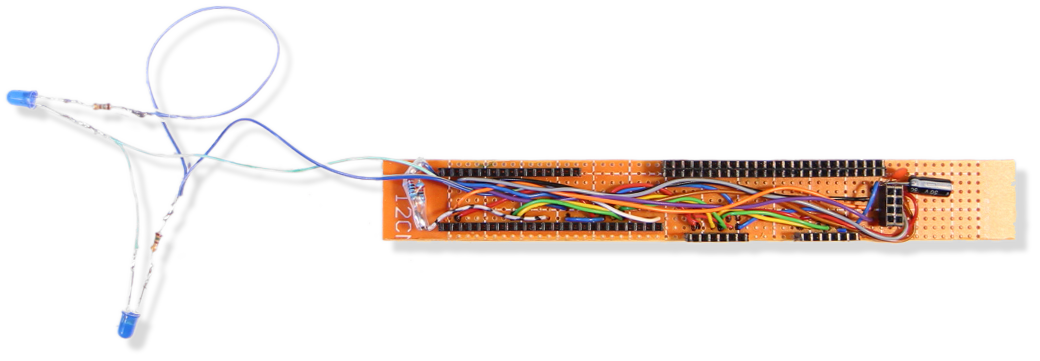
Lorsque cela est fait, le tableau ressemble à ceci :
2.5
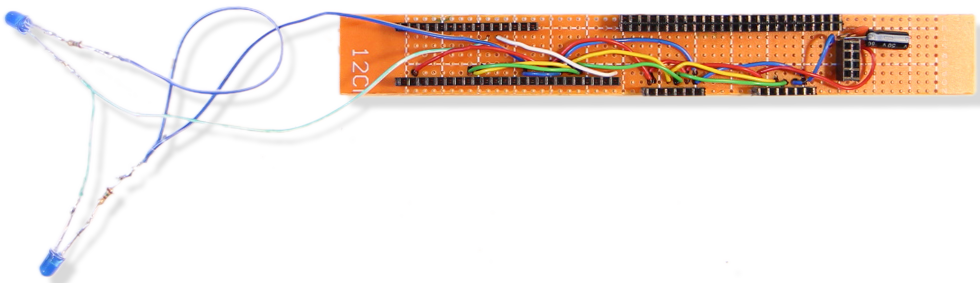
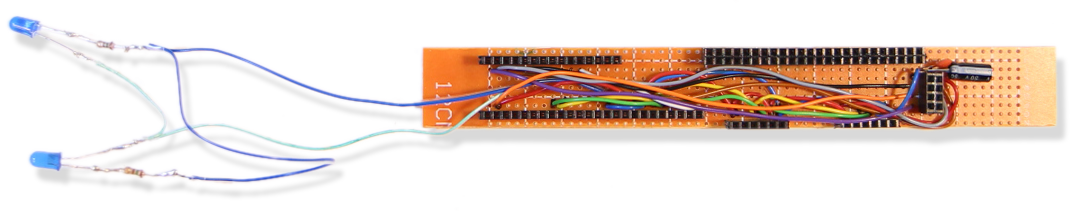
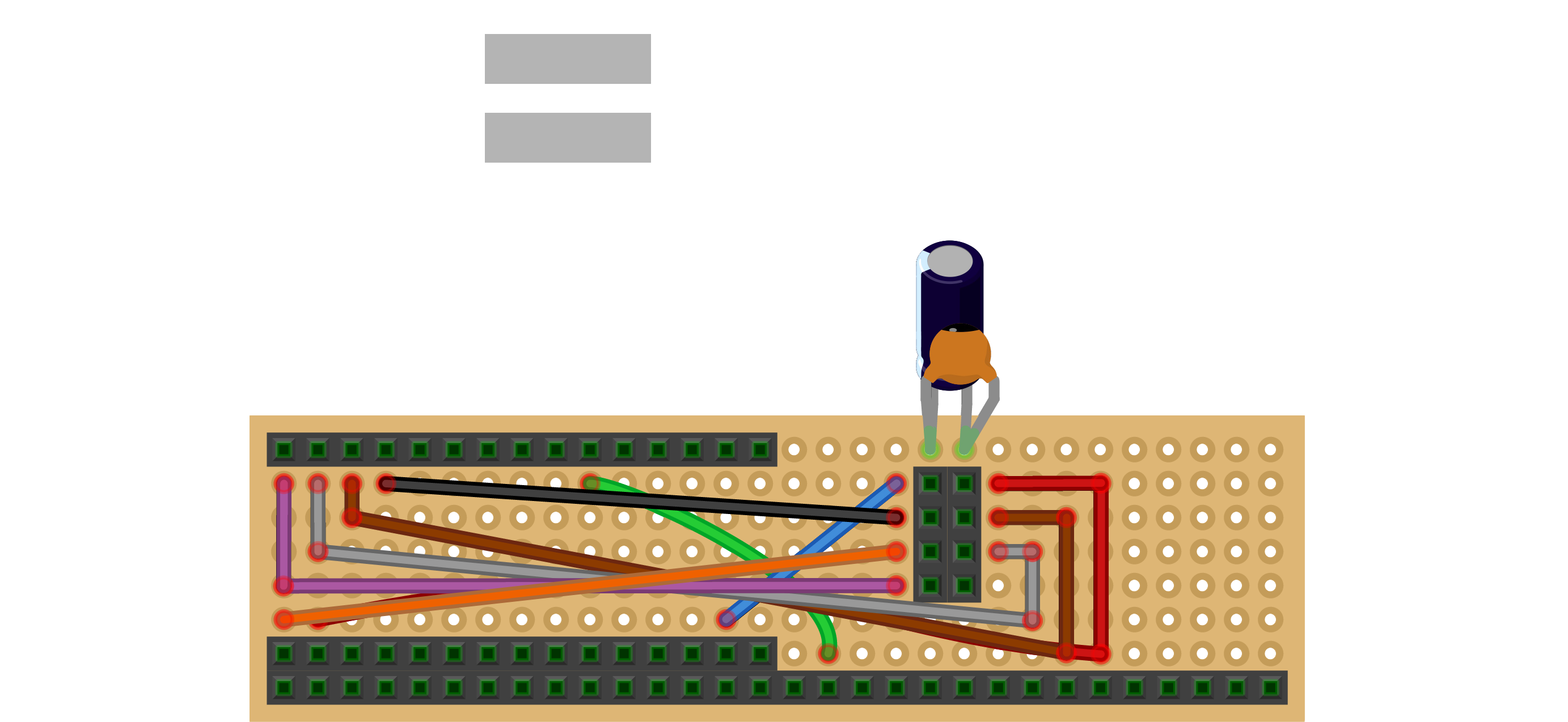
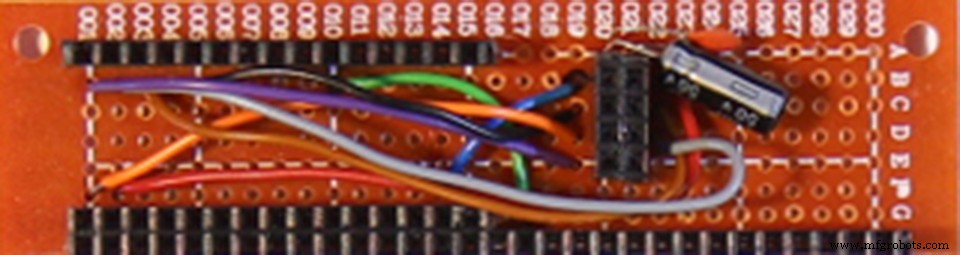
L'émetteur-récepteur radio communique via le protocole SPI (interface périphérique série) qui nécessite plus de connexions que I2C, nous ajoutons donc des câbles noir, gris, marron, violet et orange :
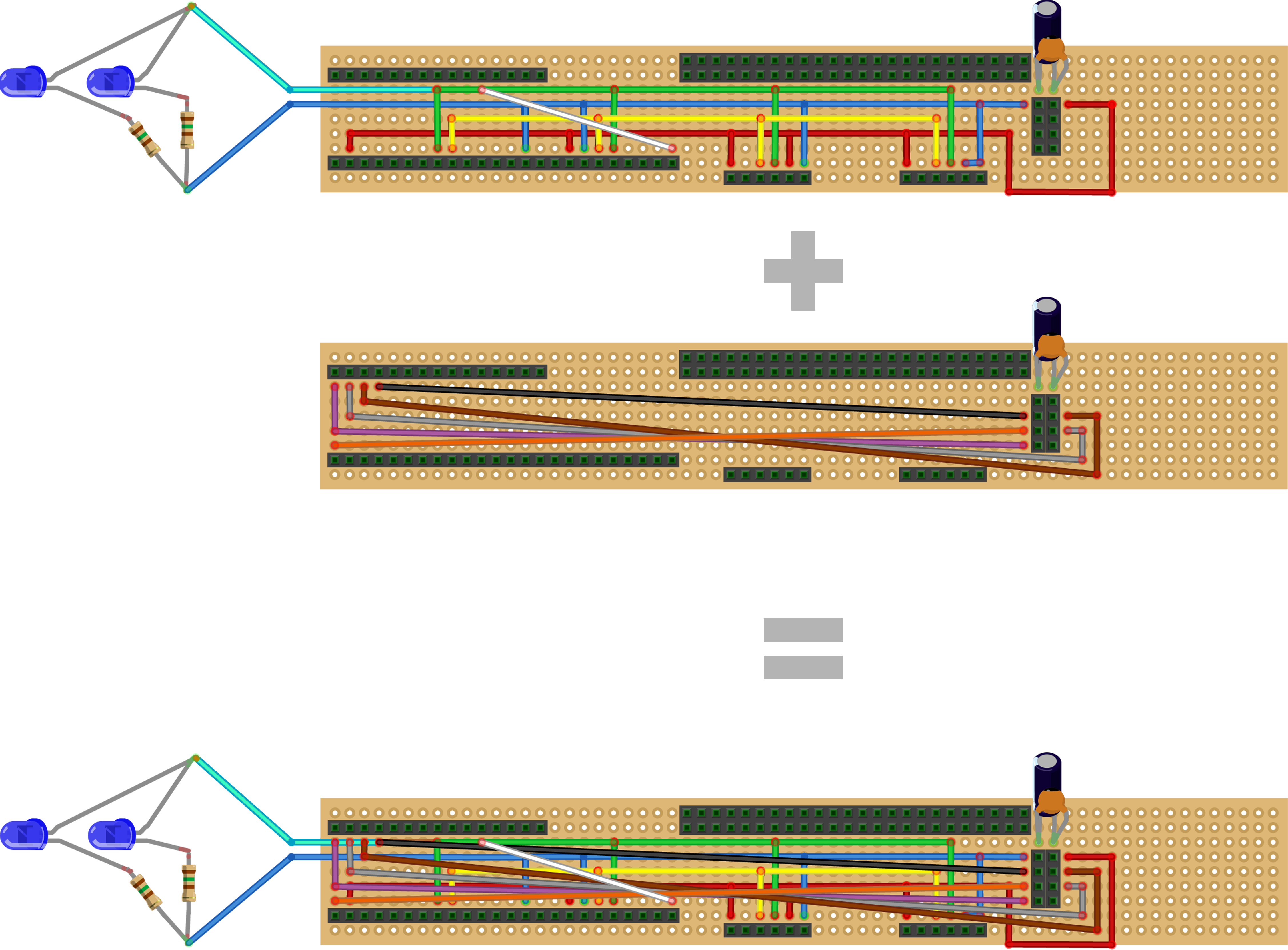
Voici ce que vous obtiendrez :
2.6
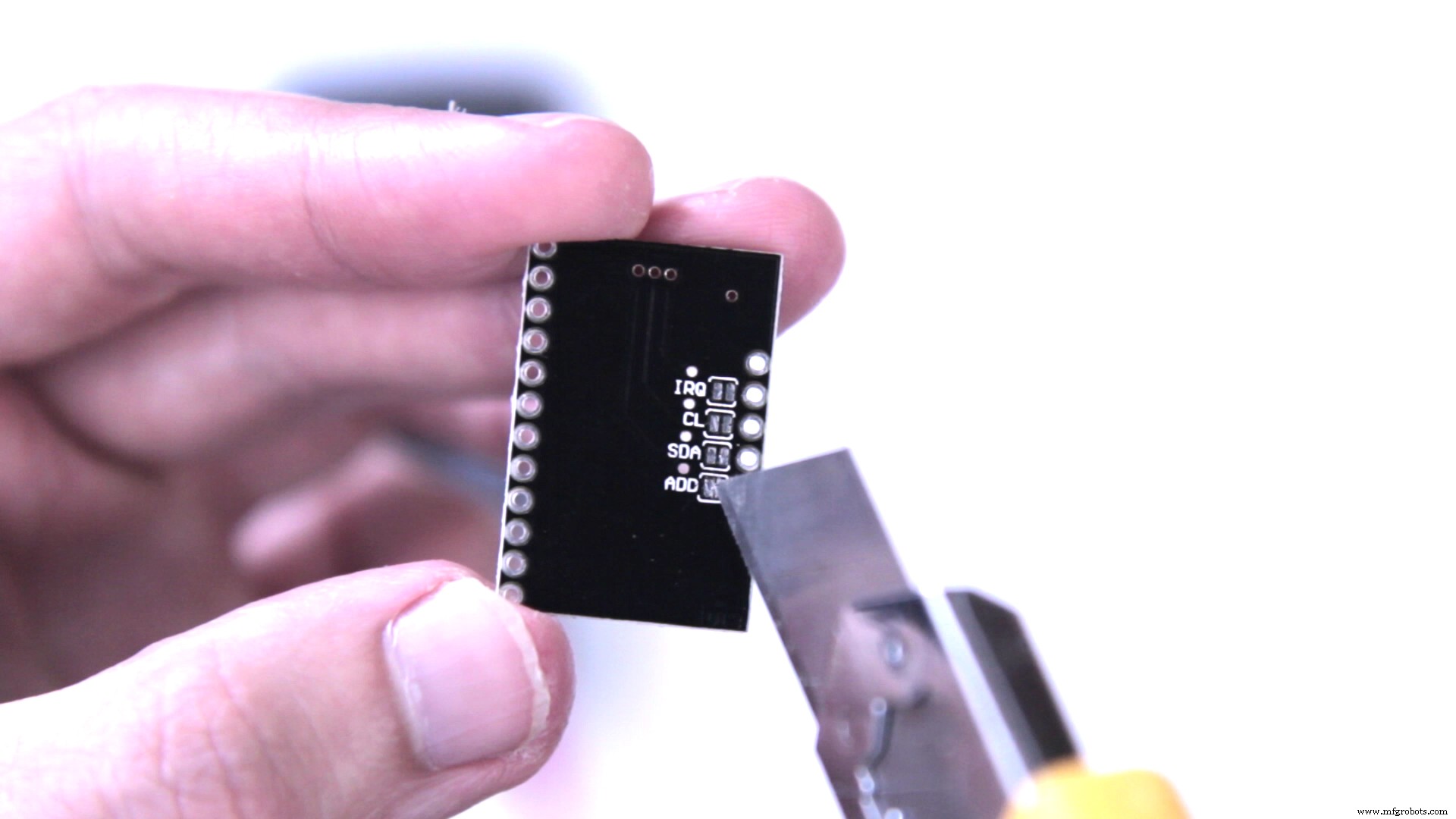
Il est maintenant temps de préparer les composants.
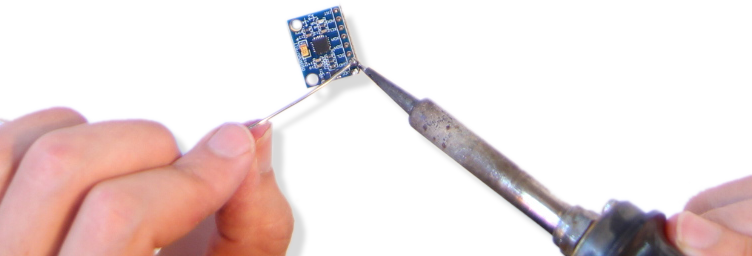
En dehors de la soudure sur les embases mâles si elles ne sont pas pré-soudées, faites particulièrement attention aux cartes des capteurs tactiles ! Les modèles bon marché en provenance de Chine ont leur broche d'adresse câblée à la terre sans résistance de rappel entre les deux, vous devez donc couper physiquement cette connexion au bas de la carte avec un couteau utilitaire. Coupez entre les deux plots de soudure à côté de l'endroit où ADD est écrit. Je recommande d'utiliser un multimètre pour vérifier qu'aucune connexion n'est laissée entre les plaquettes par la suite :
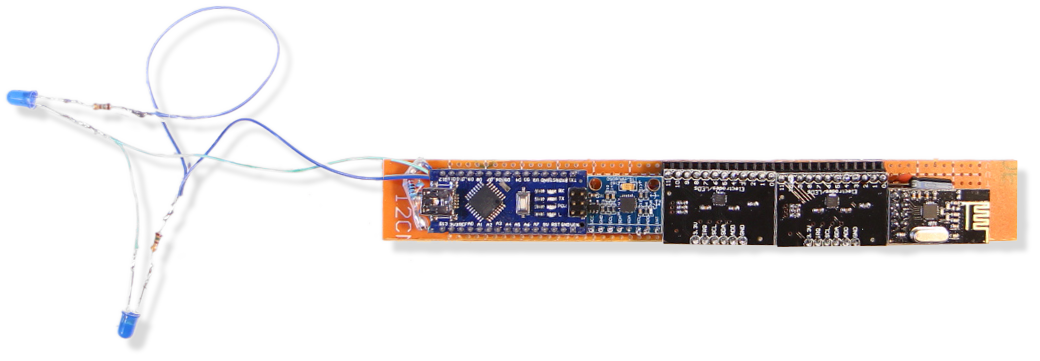
Lorsque tous les composants ont leurs en-têtes de broche soudés et que les cartes de capteur tactile sont préparées, vous pouvez brancher l'Arduino Nano, le gyroscope, les deux cartes de capteur tactile et l'émetteur-récepteur radio dans la carte contrôleur :
La carte contrôleur (peut-être) terminée :

2.7
Après une double vérification, si tout est câblé correctement, l'étape suivante consiste à télécharger le code Kravox-Controller fourni (voir les pièces jointes) sur l'Arduino nano, mais avant de pouvoir le faire, vous devrez installer des bibliothèques pour le gyroscope, le capteurs tactiles et l'émetteur-récepteur radio. Si vous êtes nouveau sur les bibliothèques Arduino, découvrez comment les installer ici.
- Le gyroscope MPU-6050 nécessite les bibliothèques "I2Cdev.h" et "MPU6050_6Axis_MotionApps20.h" de Jeff Rowberg qui peuvent être téléchargées ici.
- Les cartes à capteurs tactiles MPR121 nécessitent la bibliothèque "MPR121.h" de Bare Conductive que vous pouvez trouver ici. Il existe au moins deux versions de la bibliothèque. Assurez-vous d'installer la version développée par Bare Conductive et non celle développée par Adafruit.
- La carte émetteur-récepteur radio NRF24L01 nécessite les bibliothèques "nRF24L01.h" et "RF24.h" de TMRh20 qui peuvent être téléchargées ici. Veuillez noter :Il existe également au moins deux versions de ces bibliothèques avec des noms identiques. Assurez-vous d'installer ceux développés par TMRh20 et non ceux de maniacbug.
Dès que les bibliothèques sont installées, vous pouvez télécharger le code Kravox-Controller. Si vous souhaitez déjà vérifier si le contrôleur fonctionne, vous pouvez le laisser sortir les données des capteurs tactiles et du gyroscope via le moniteur série. Pour cela, vous devez décommenter la dernière section du code du récepteur avant de télécharger :

en supprimant les marques de commentaire au début ( /* ) et à la fin ( */ ) de sorte que le code ressemble à ceci :
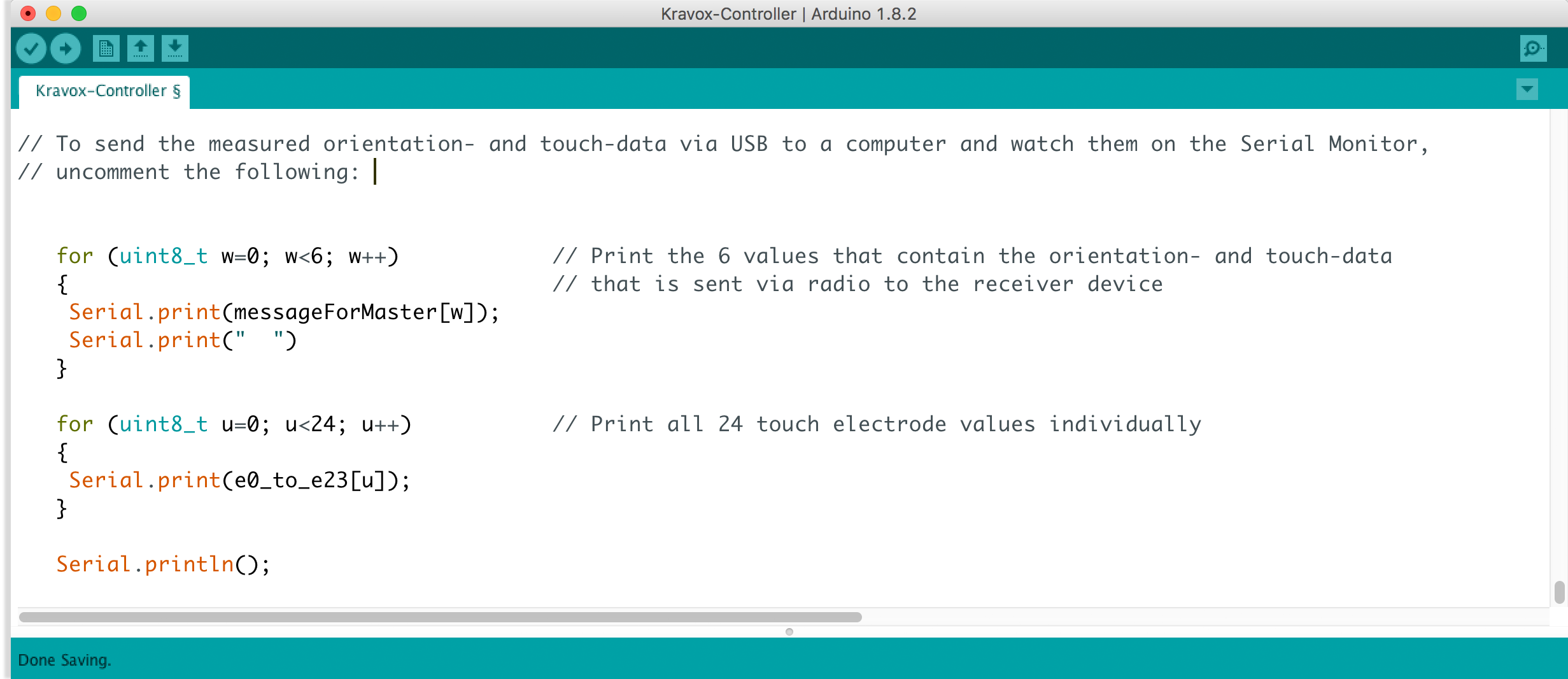
Après avoir téléchargé le code avec cette variation, ouvrez le moniteur série et réglez-le sur un débit en bauds (vitesse de transfert de données) de 115200. Vous devriez maintenant pouvoir voir les données des capteurs qui changent lorsque vous déplacez la carte contrôleur et touchez les broches des cartes MPR121 qui sont étiquetées de 0 à 11.
Si rien ne fonctionne ou si vous n'obtenez que des zéros, vérifiez soigneusement votre câblage et comparez-le au schéma de circuit ci-dessus. Si vous obtenez une sortie amusante du moniteur série, vérifiez si vous l'avez réglé sur la bonne vitesse de transmission.
2.8
Connectez votre carte contrôleur à la banque d'alimentation que vous souhaitez utiliser avec elle.
Si la carte (ou plus précisément le powerbank) ne s'éteint pas automatiquement après un certain temps, votre carte contrôleur est terminée et vous pouvez passer à la partie 3 ! Sinon, effectuez l'étape 2.9
2.9
En principe, la carte contrôleur est terminée, mais certains powerbanks s'éteignent automatiquement après quelques secondes lorsqu'ils sont connectés à la carte contrôleur comme c'est le cas actuellement car ils consomment si peu d'énergie
Comme solution sale, nous pouvons simplement ajouter trois résistances de 220 Ohm en parallèle entre les broches 5V et GND de l'Arduino. Ces résistances dissiperont de l'énergie supplémentaire et les transformeront en chaleur, de sorte que le contrôleur consomme suffisamment pour que la banque d'alimentation reste allumée. Ne vous inquiétez pas :même avec une petite banque d'alimentation, il fonctionnera encore pendant des jours sans se recharger
Retirez l'Arduino Nano et soudez les résistances comme ceci :

Le tableau ressemble donc à ceci :
et après avoir refixé les composants, la carte contrôleur (définitivement) finie ressemble à ça :
Partie 3 - Fabrication de la carte du récepteur
Dans cette partie du tutoriel, je vais vous montrer comment faire la carte du récepteur. Le processus est assez similaire à la fabrication de la carte contrôleur
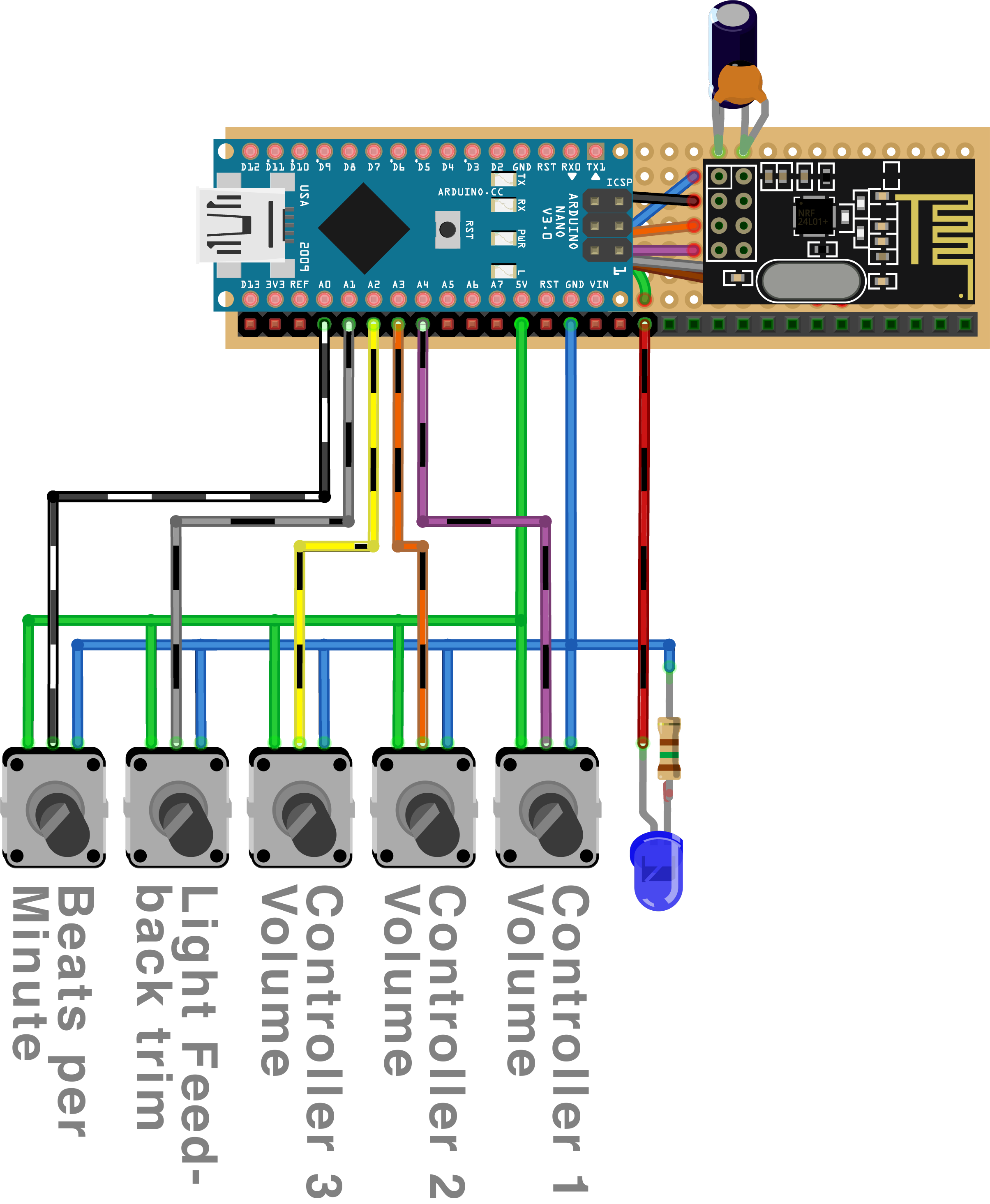
Si vous voulez vérifier où un certain câble doit être connecté, vous pouvez vous référer à ce schéma de circuit :
3.1
La première étape consiste à nouveau à découper le panneau perforé et les embases femelles à la bonne taille et à les assembler avec un petit et un grand condensateur qui contribuent à augmenter la fiabilité de l'émetteur-récepteur radio. L'en-tête de broche femelle le plus bas est intentionnellement laissé plus longtemps que nécessaire, vous pouvez donc potentiellement l'utiliser pour d'autres projets comme un synthétiseur granulaire Arduino plus tard. Vous pouvez comparer cette étape avec l'étape 2.1 pour plus d'informations
Une photo du tableau à la fin de l'étape 3.1 :
3.2
Ensuite, nous ajoutons tous les câbles d'alimentation rouge et bleu. Le rouge correspond à 3,3 V et le bleu à la masse (GND)
Voici à quoi cela devrait ressembler :
3.3
Soudure dans les câbles pour la communication SPI :
3.4
Fixation des composants :

La carte du récepteur est maintenant terminée, mais avant de pouvoir télécharger le code Kravox-Receiver des pièces jointes vers l'Arduino Nano, nous devons d'abord créer une interface pour le récepteur
Partie 4 - Création de l'interface du récepteur
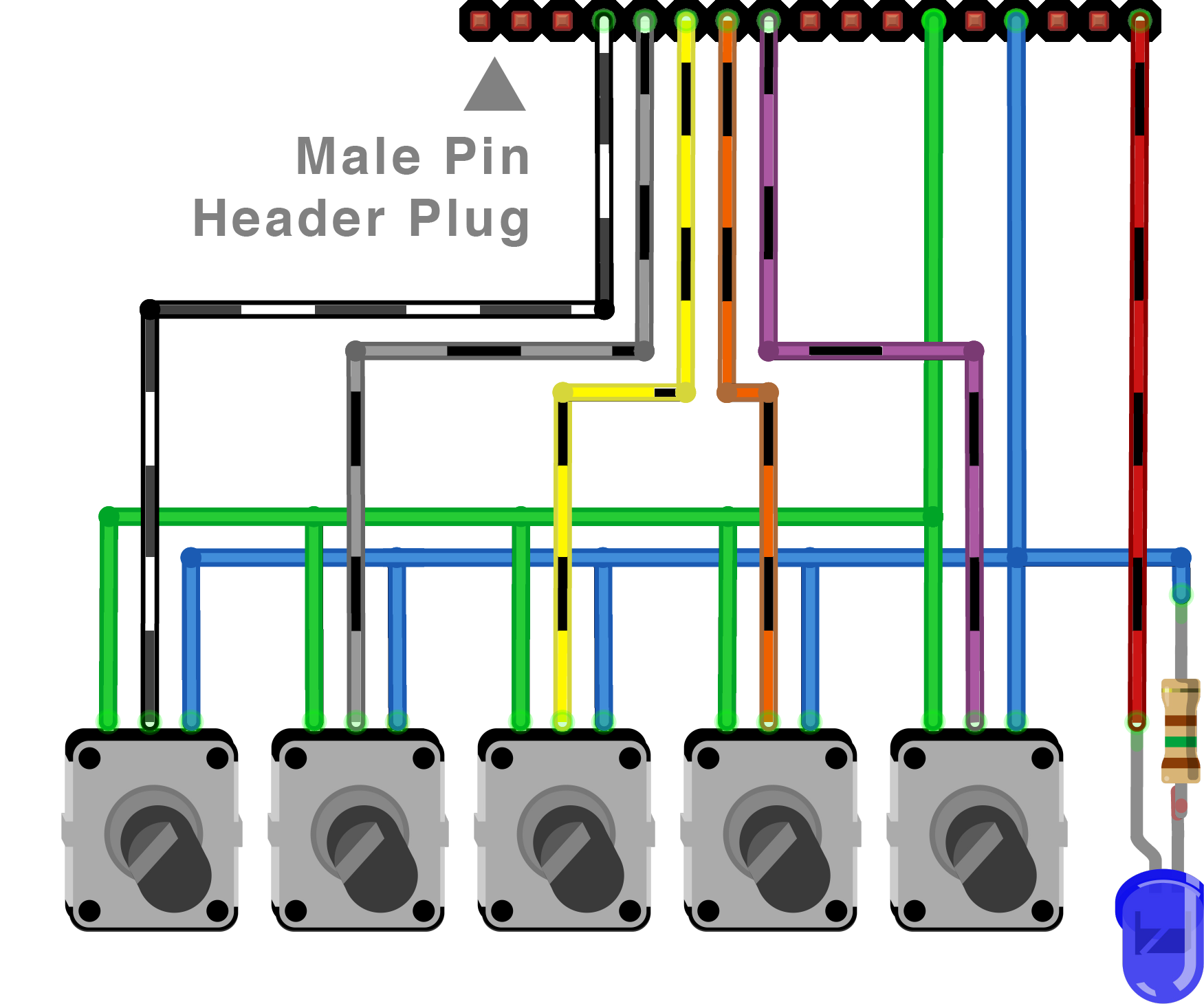
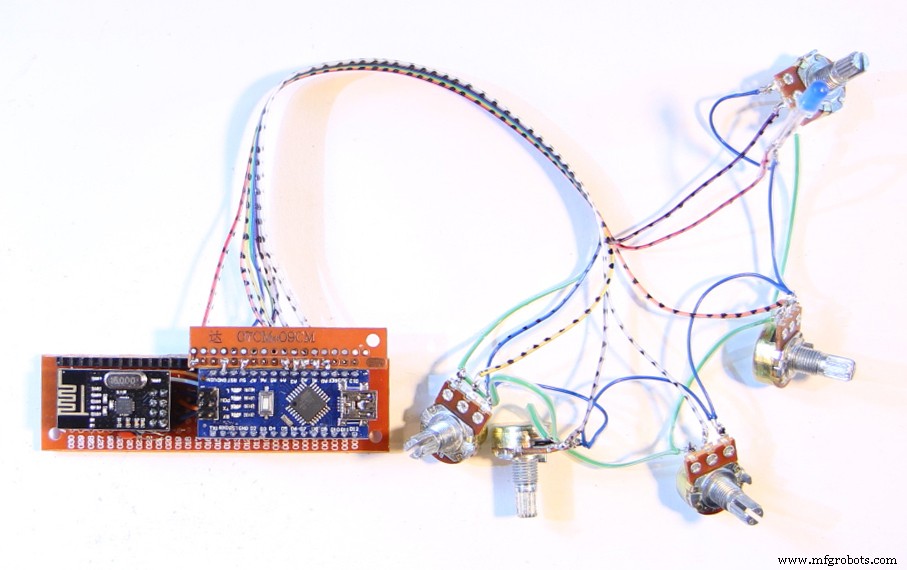
Dans cette partie du tuto je vous montre comment faire une interface avec 4 potentiomètres et une LED pour le récepteur. L'interface est câblée comme ceci :
Et sera branché sur la carte réceptrice comme ça :
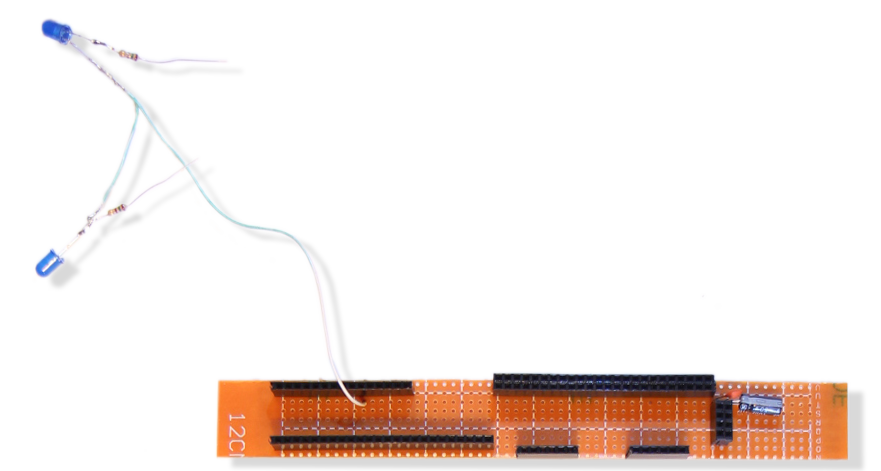
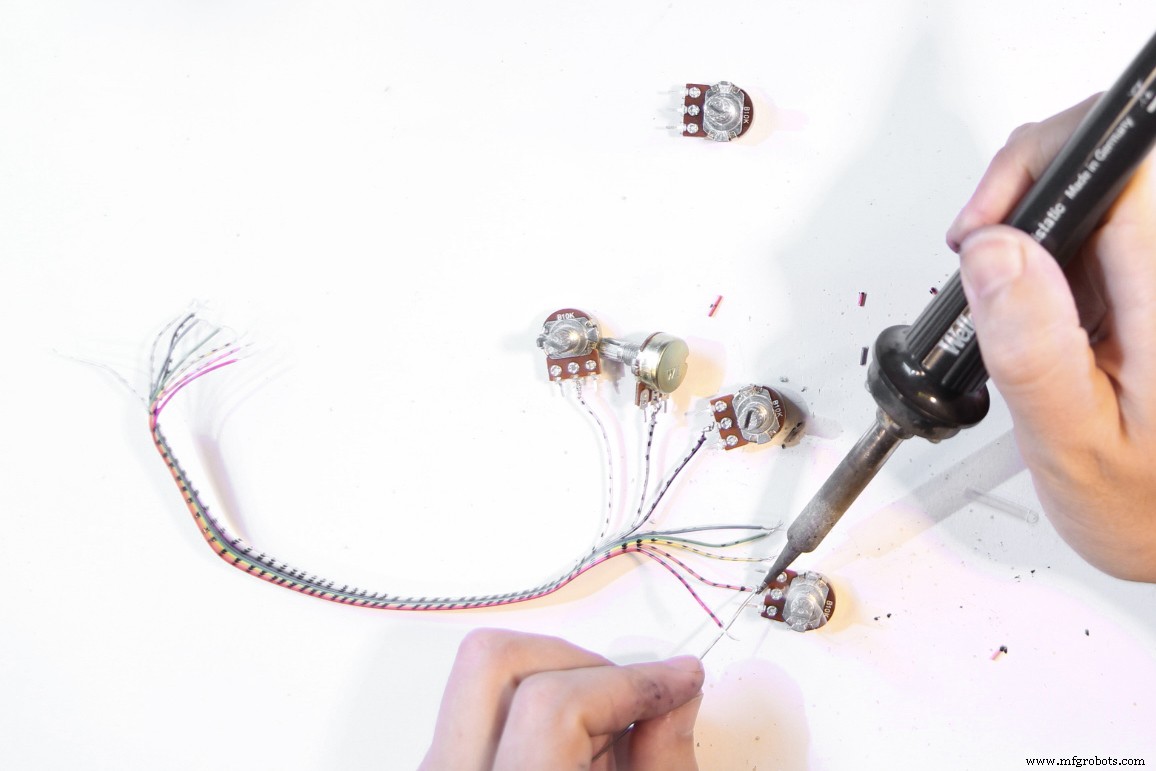
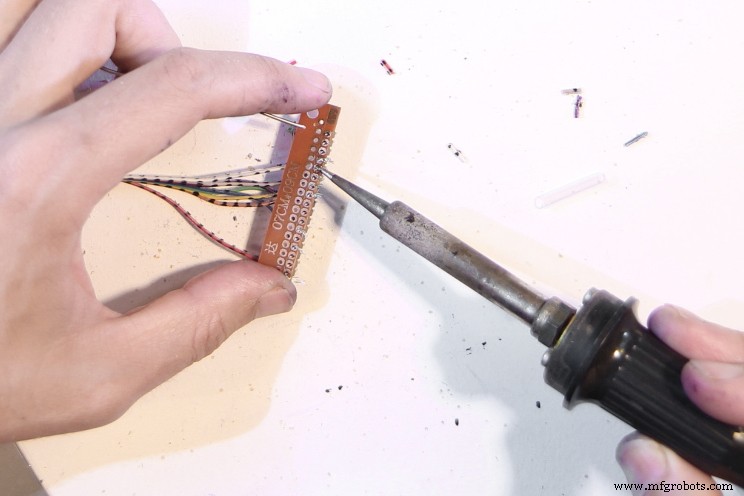
Procédez comme ceci :Prenez d'abord un toron de câble de 8 câbles et soudez-en 5 aux broches du milieu des potentiomètres. Utilisez de préférence les mêmes couleurs pour ne pas vous tromper :
Ensuite, coupez un panneau perforé de 2 * 17 trous de large et un en-tête de broche mâle à 17 broches à la taille

Fixez les câbles et l'en-tête de broche à la carte. Faites attention au schéma de circuit ci-dessus pour vous assurer que vous connectez les câbles aux bons endroits
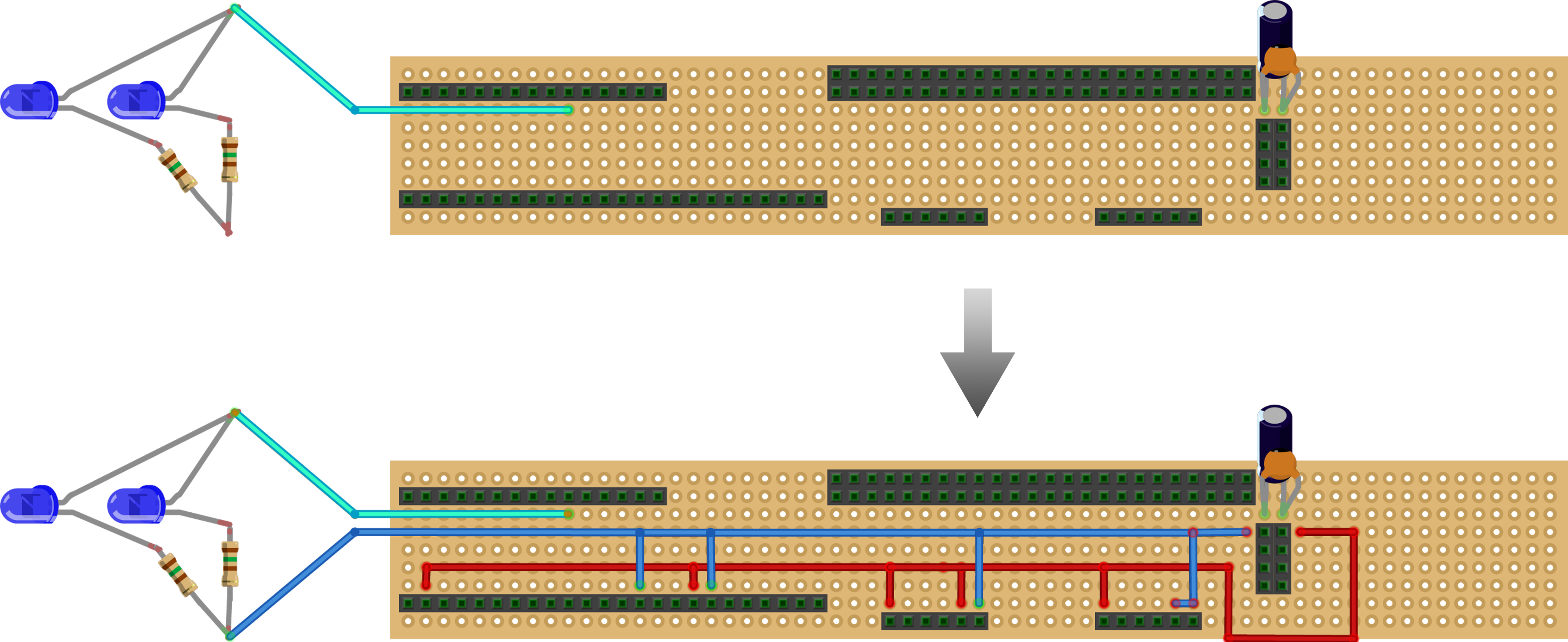
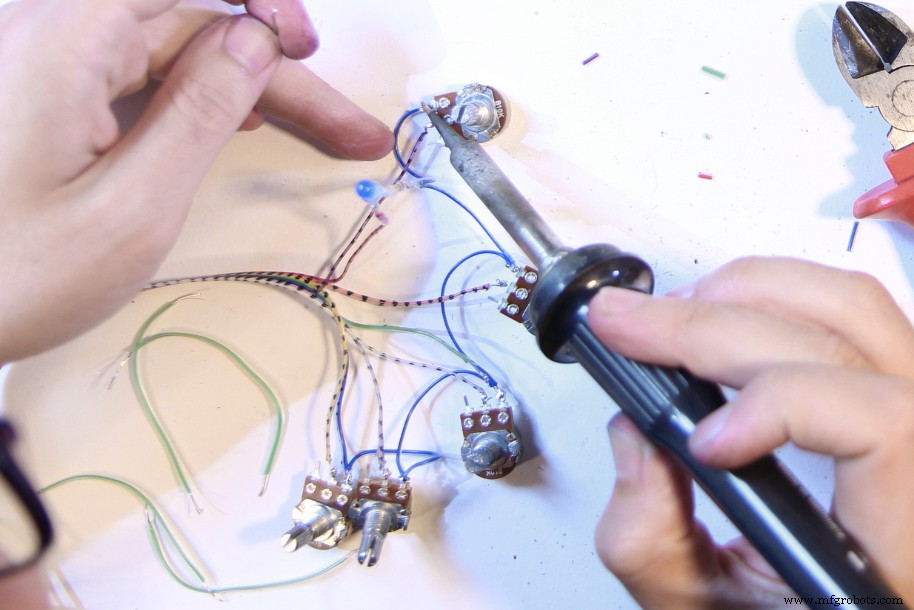
Connectez maintenant un côté de tous les potentiomètres avec des câbles de connexion à la terre bleus (et utilisez peut-être des câbles légèrement plus longs que moi). Ajoutez également la LED bleue avec sa résistance de limitation de courant de 150 Ohm. Faites à nouveau attention à la polarité de la LED (comparez à l'étape 2.2)
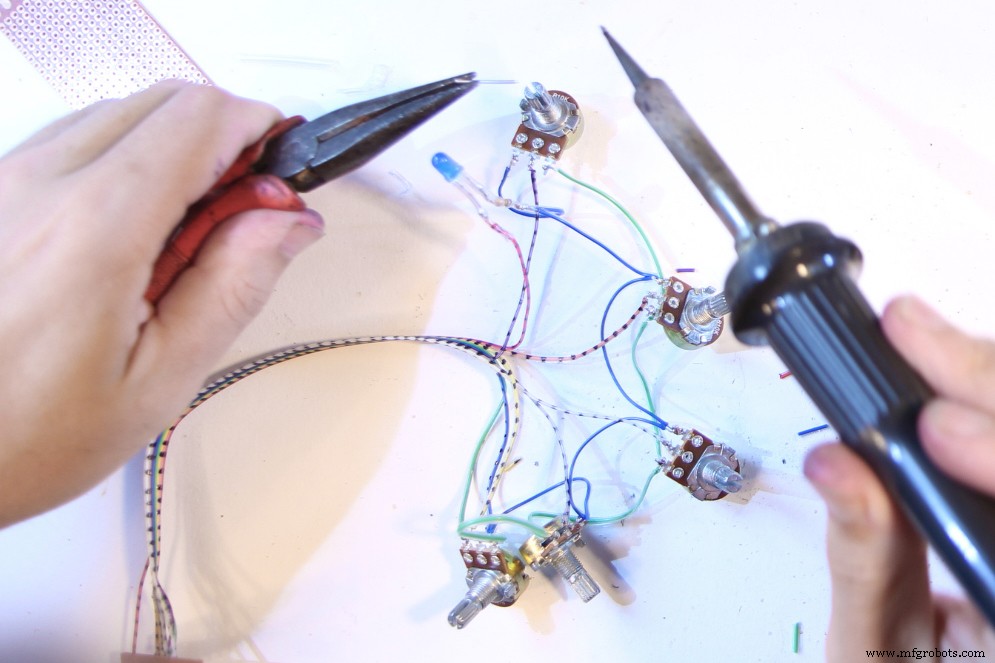
Ensuite, connectez l'autre côté de tous les potentiomètres avec des câbles de connexion verts 5V (et utilisez peut-être des câbles légèrement plus longs que moi).
L'interface terminée devrait ressembler à ceci...
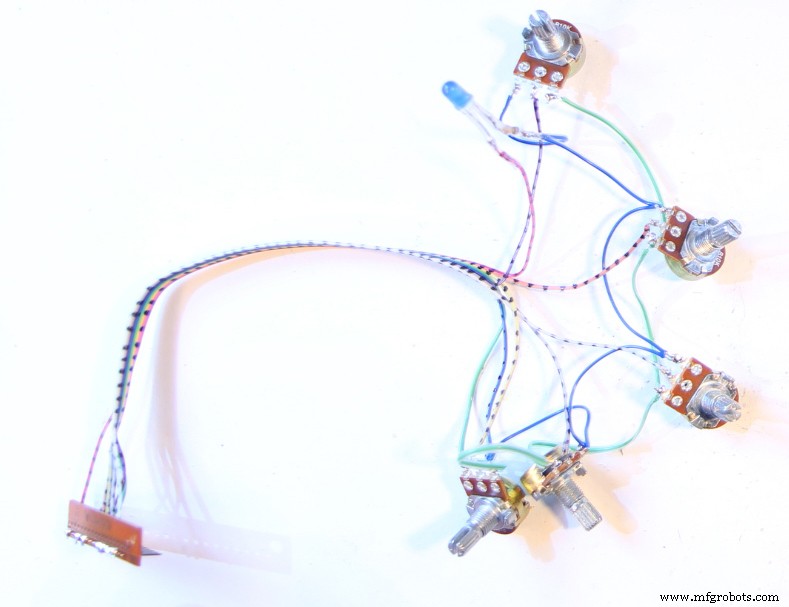
...et peut être branché sur la carte réceptrice comme ça :
Now you can also upload the Kravox Receiver code to the receiver's Arduino Nano.
If you want to see if it is working and receiving data from the controller, you again need to make a slight adjustment to the code before uploading. By default the Receiver will output it's data in a format that can be interpreted by pure data, but will not show useful information on the Serial Monitor. However you can change this behaviour in the code by commenting (adding // in front of) the line that says:
#define WRITE_AS_BYTES
and uncommenting (removing // in front of) the line that says:
// #define PRINT_VIA_SERIAL_MONITOR
So you turn this:
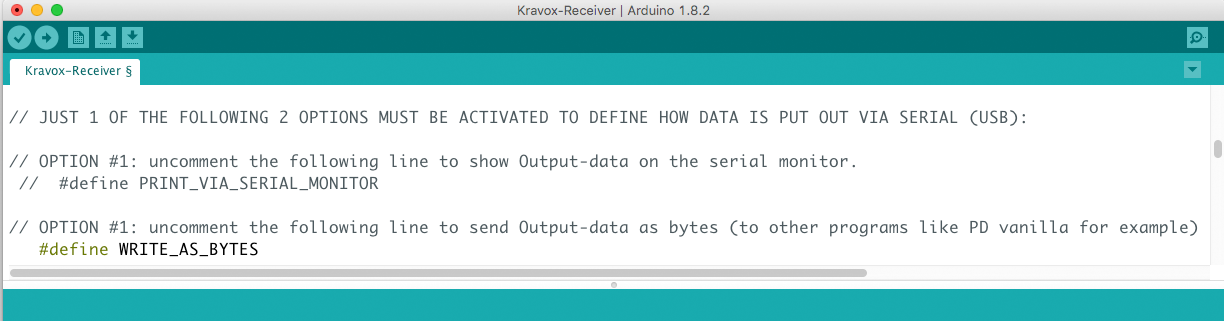
into that:
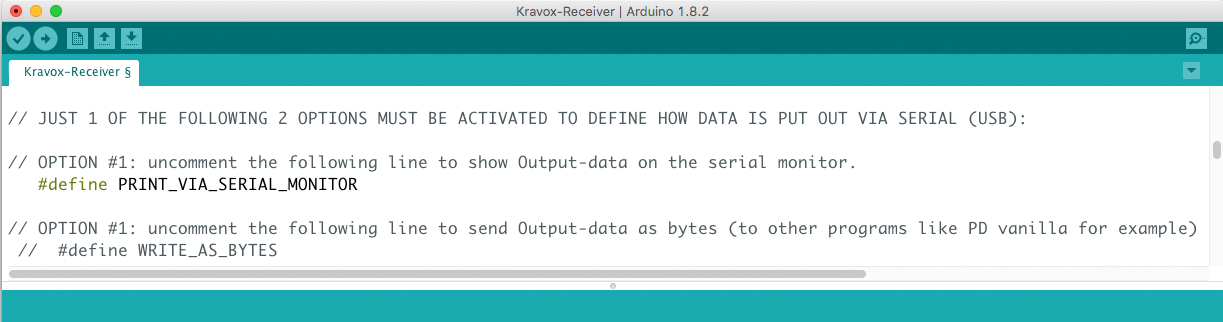
After uploading the altered code you will be able to see data from the controller and 4 of the potentiometers on the Serial Monitor as I demonstrate in this video:
Part 5 – Making the Controller Interface + Enclosure
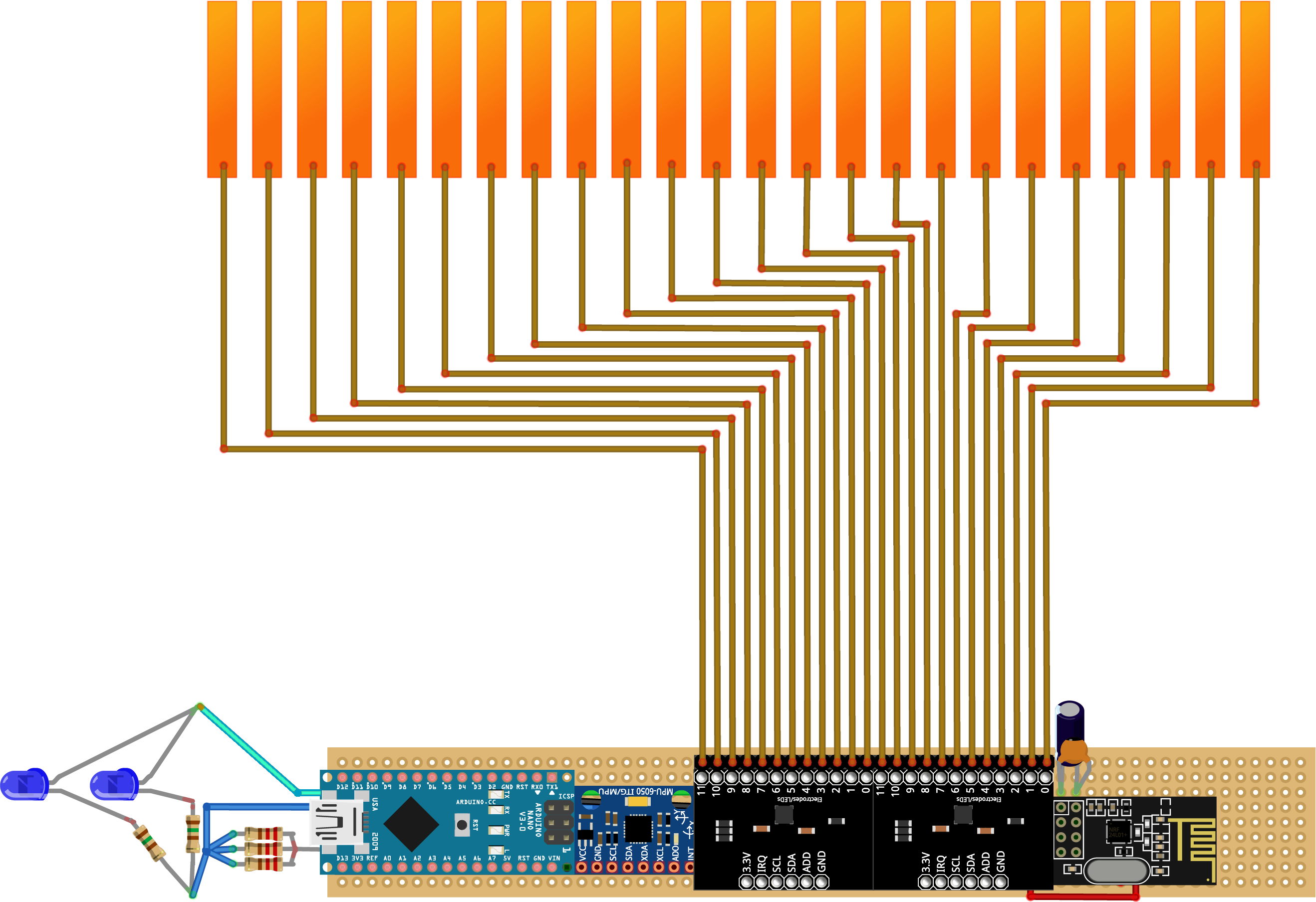
Like the receiver the controller also gets an interface – a touch interface that we will make from copper tape:
It will be connected to the controller board like this:
As we directly want to attach the touch interface to the controller's enclosure, you should already have the (non-conductive) material at hand that you want to make the enclosure from. I used empty boxes that cling film and plastic bags came in:

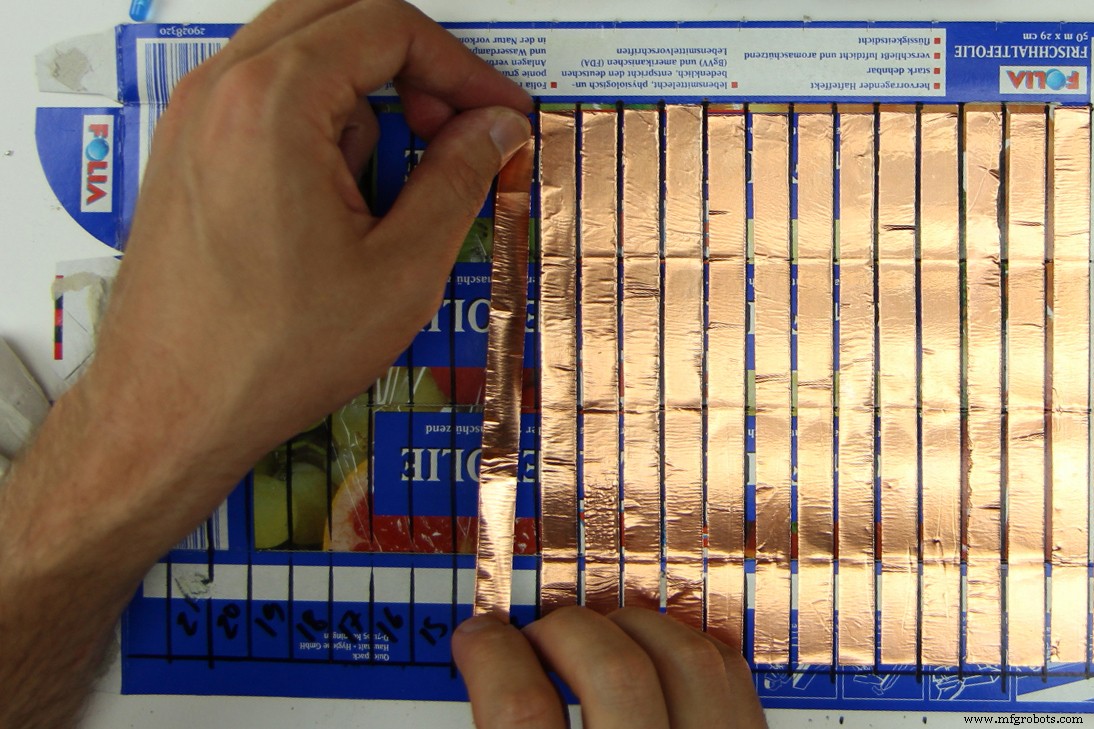
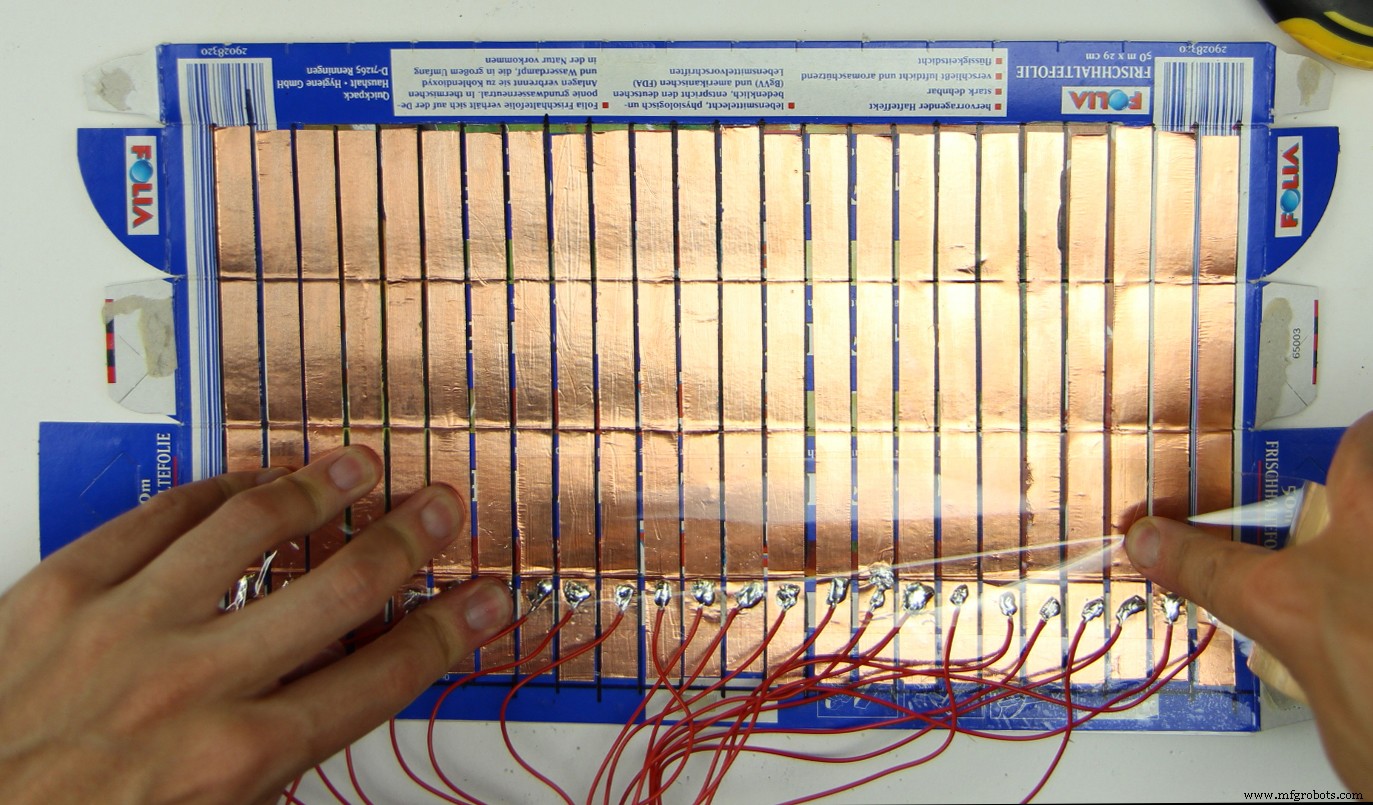
Start making the controller interface by marking where you want to attach the touch electrodes. Please note that they must not touch or overlap each other:

Next, cut the 24 copper electrodes to size...

...and attach them to the enclosure:
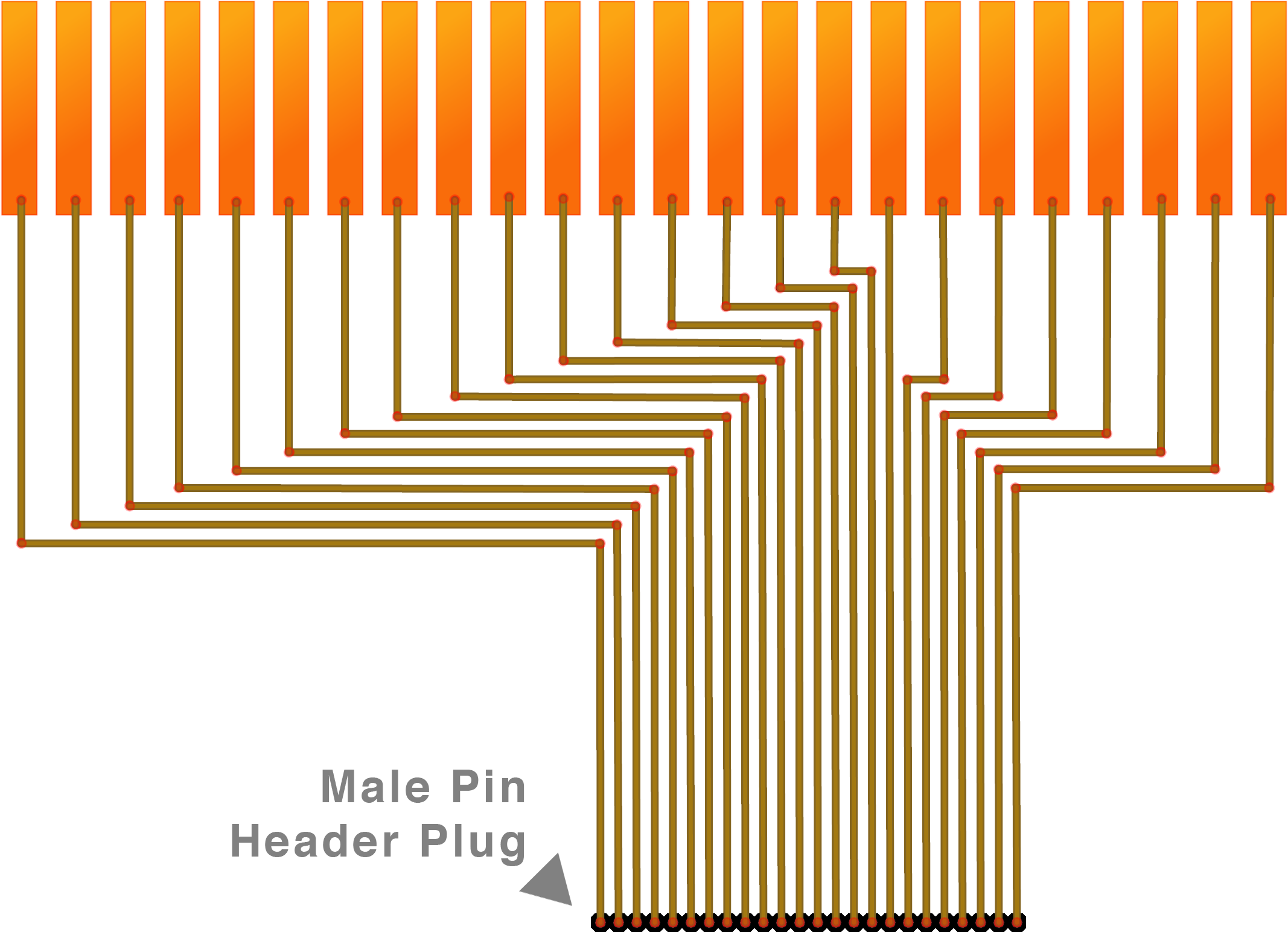
Now we can make the plug. For that cut a 2 * 24 hole wide perfboard and a 24 pin male header to size and solder 24 cables to it. The cables in the middle should be at least 10 cm long. To the outside add the width of your electrodes plus the spacing in between for each cable. If for example you use 1 cm wide copper tape and leave 3 mm between the electrodes, your cable length should increase by 1.3 cm like this 10 / 11.3 / 12.6 / 13.9 / 15.2...
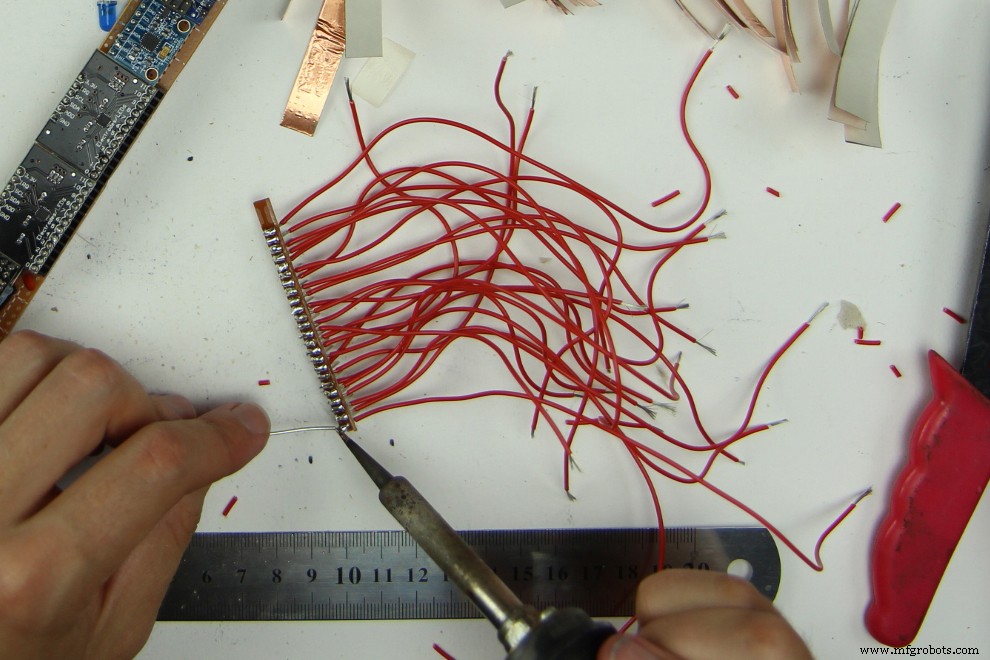
and solder the other ends of the cables to the electrodes like this:
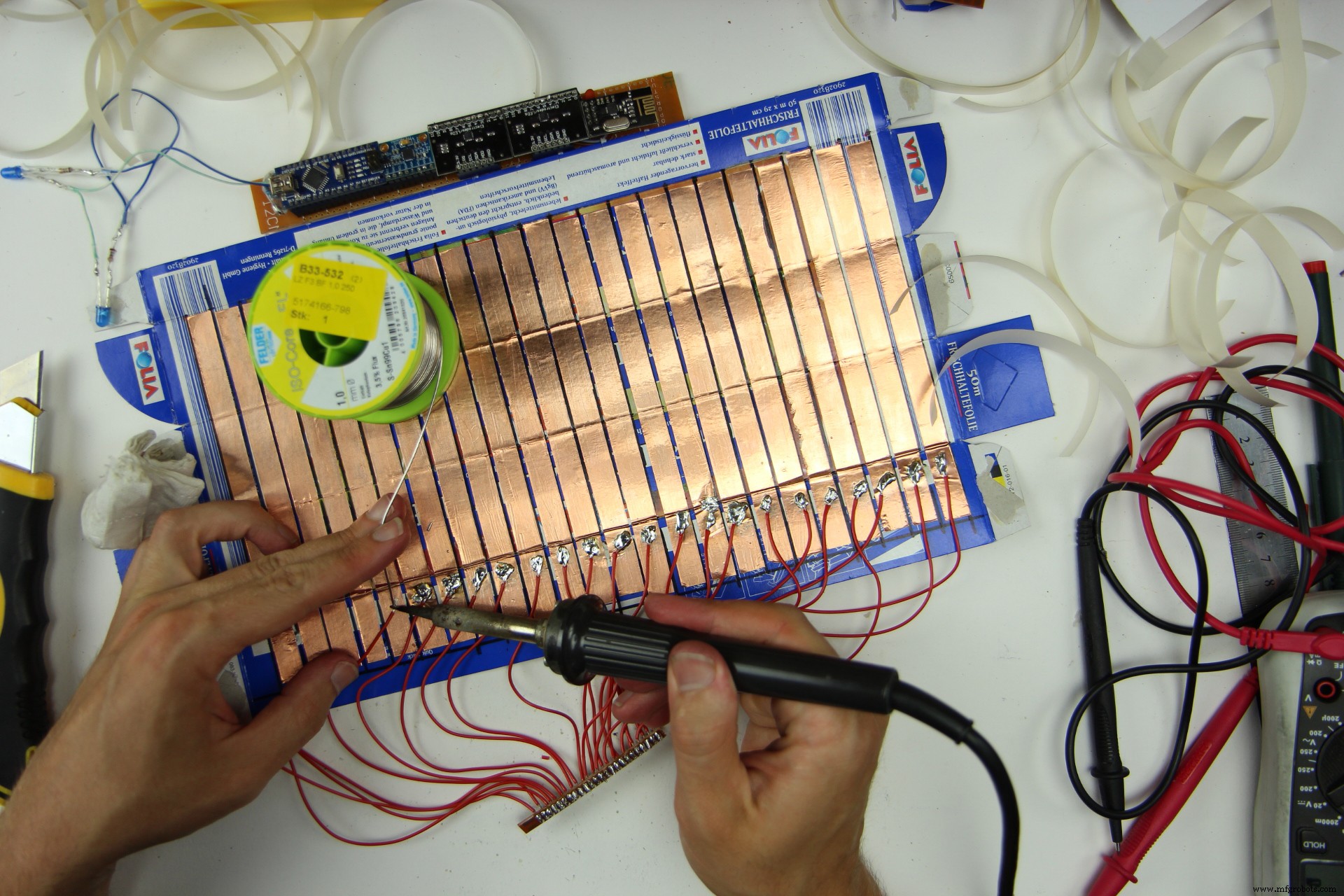
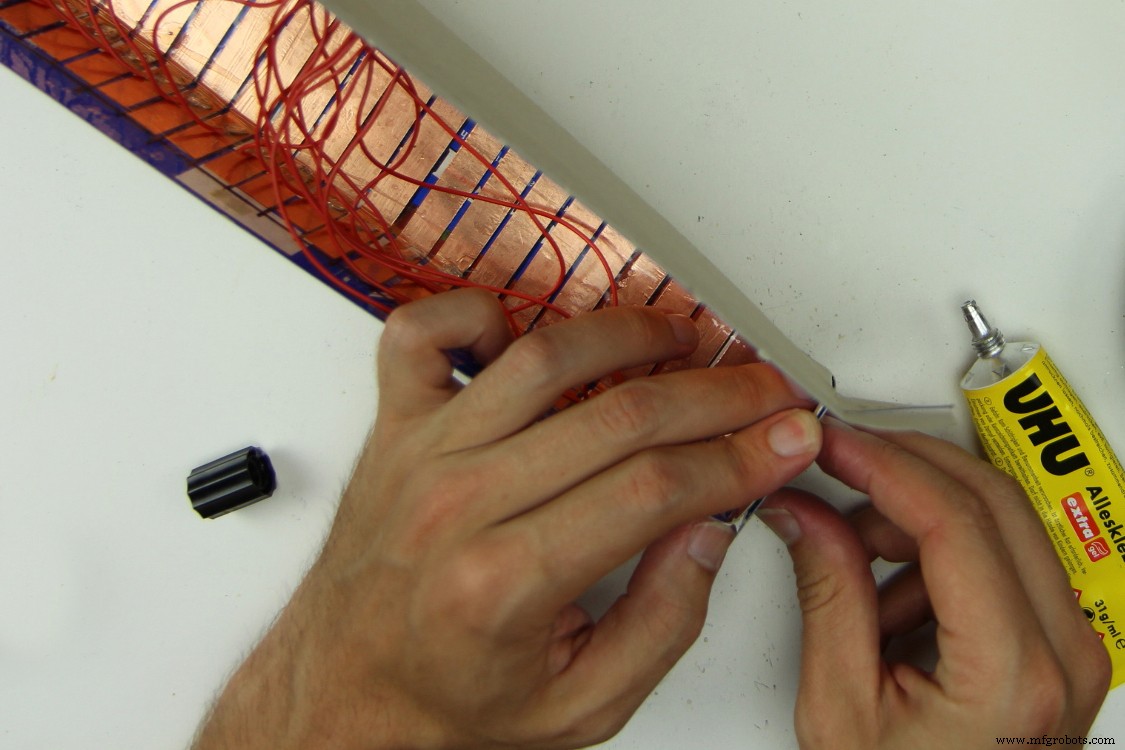
Finish the interface by covering the copper surface with non-conductive adhesive tape:
Next fold the interface into a box and glue it:
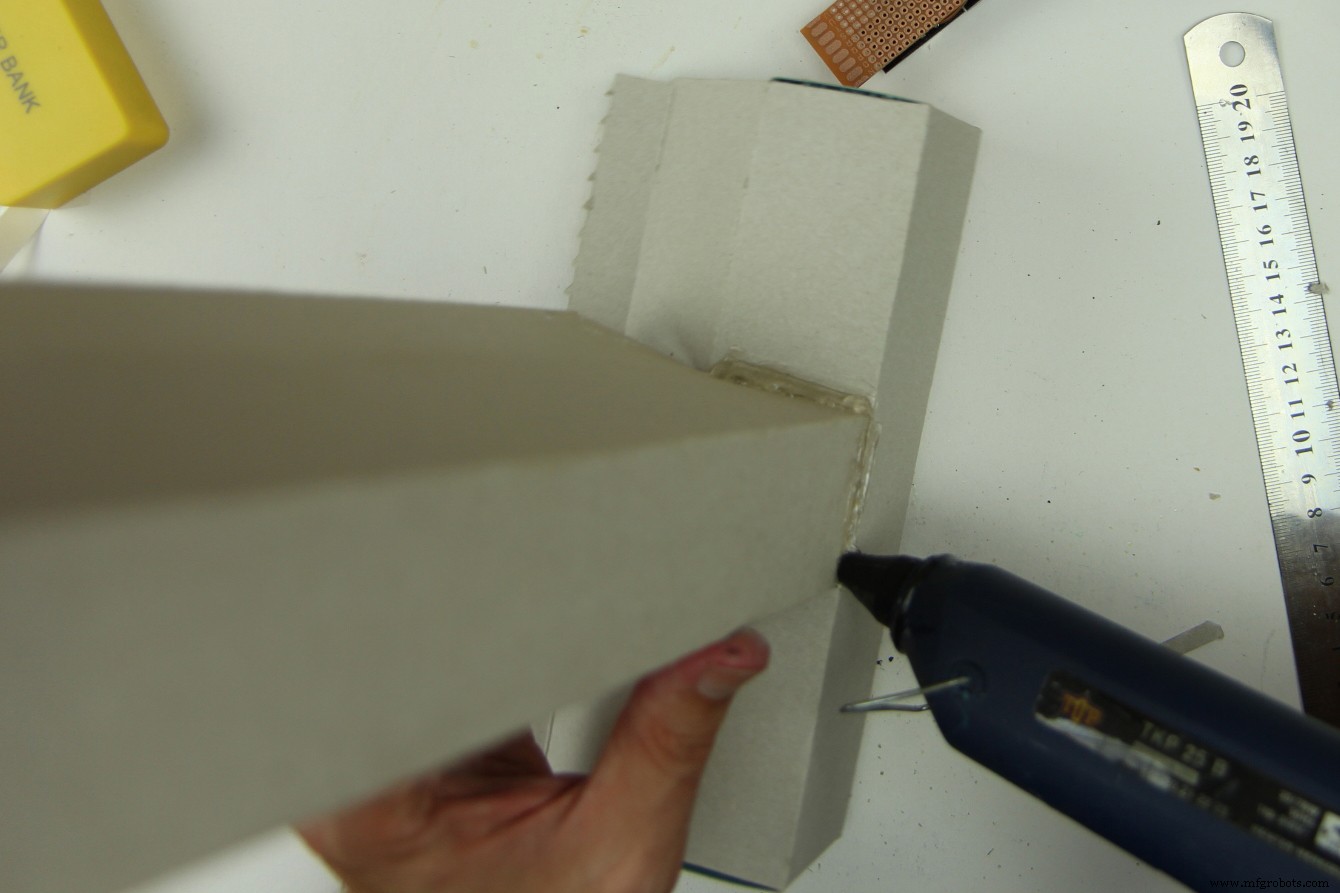
Glue a smaller box to the box we made in the previous step. It later will contain the powerbank:
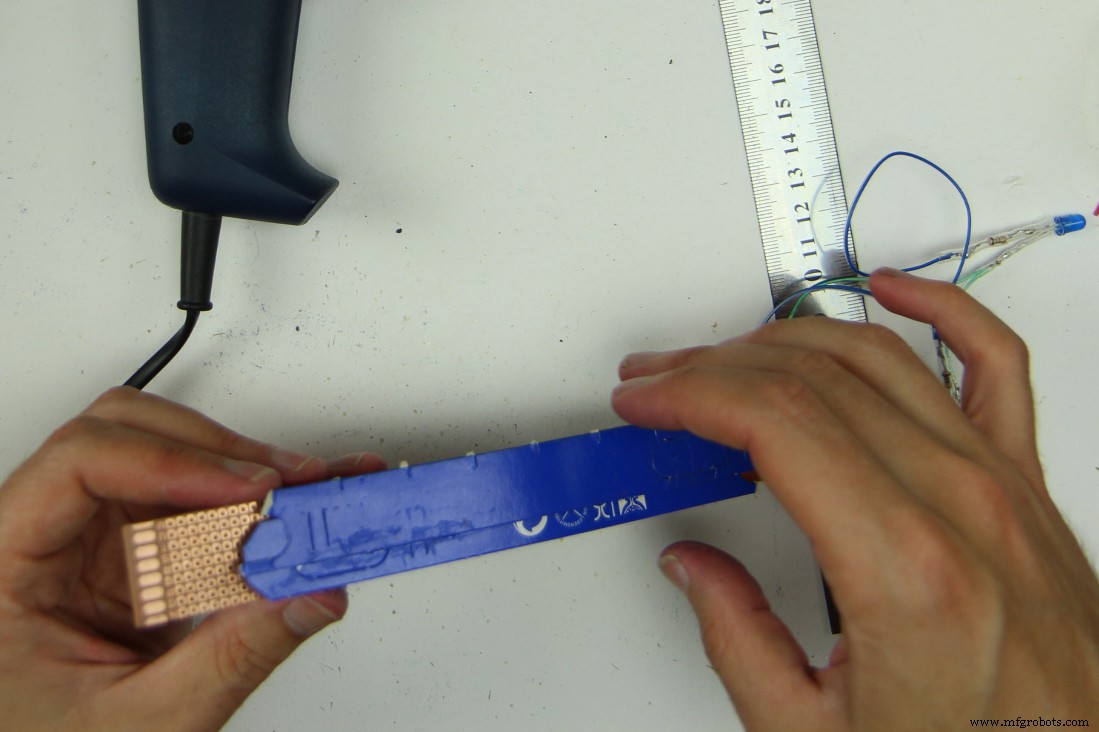
Cover the back of the controller board with some leftover cardboard orother slightly thicker non-conductive material:
Cut out holes for the LEDs and glue them and the powerbank (yellow object in the picture) in place. Make sure to place the powerbank in a way that you can still plug in and remove the USB-cable because that is how you turn your controller on and off. Also connect the touch-interface to the controller board and put it in the box. Most likely it will not move much, so you do not need to glue it in.
Make a cut out for the USB-A to USB-C cable at the junction of the two boxes, pull it through and connect it to the Arduino Nano:
Now the Controller is done!
You can close it with some rubber bands. If you later have problems with the sensors recognizing touch when there is none, try to put some non-conductive material like clingfilm or the like between the touch sensitive enclosure and the board and meandering cables. Also make sure to connect the powerbank when the touch sensitive part of the enclosure does not touch your hands or anything else. See Part 7 for more info.
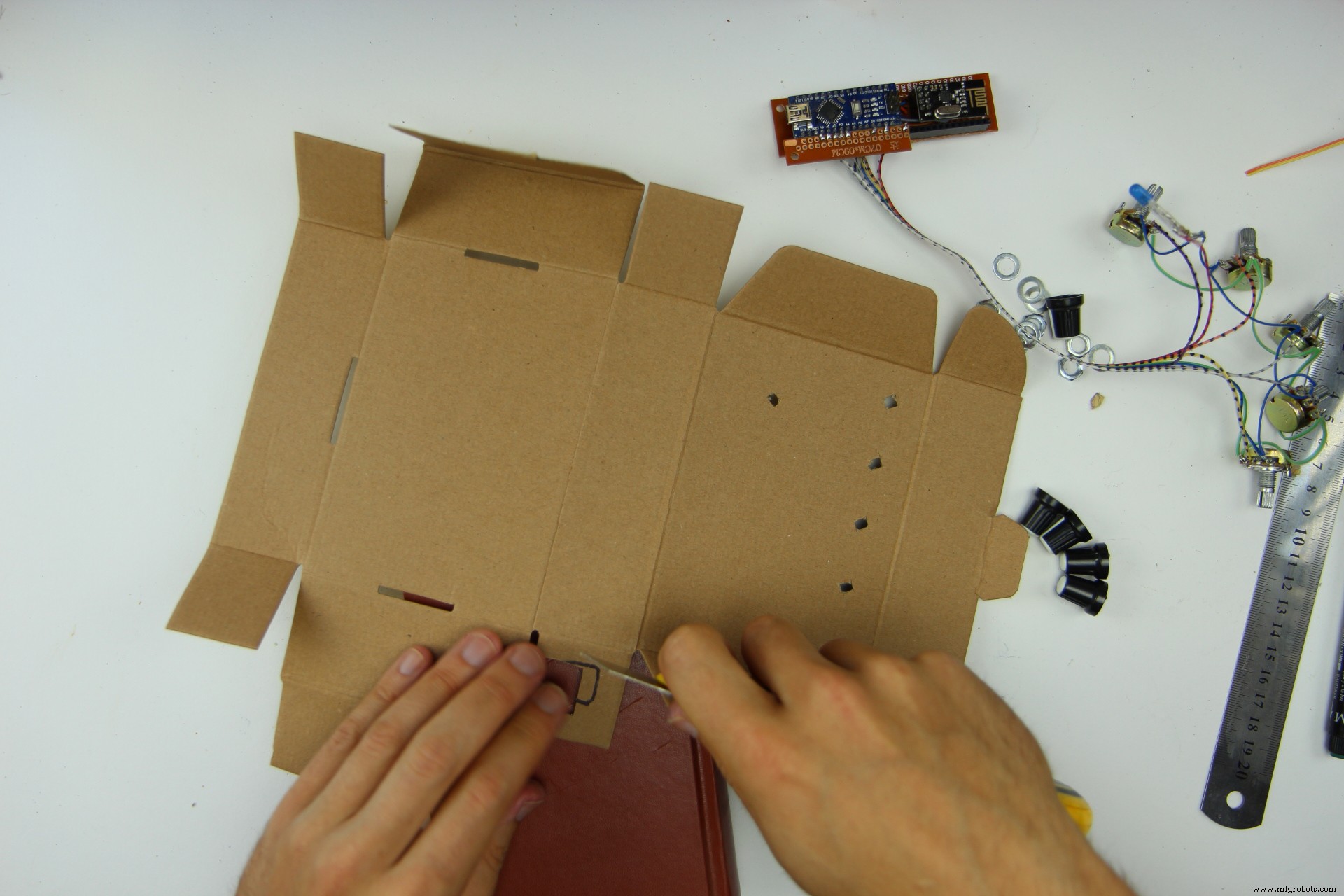
Part 6 – Making the Receiver Enclosure
In part six we will make an enclosure for the receiver as well. You will need another cardboard box (I chose one that contained a bluetooth transceiver before – fitting huh?) and some knobs for the potentiometers
First cut out some circular holes for the potentiometers the LED. Also mak a cut out where you want to connect the USB-Cable to the Arduino Nano
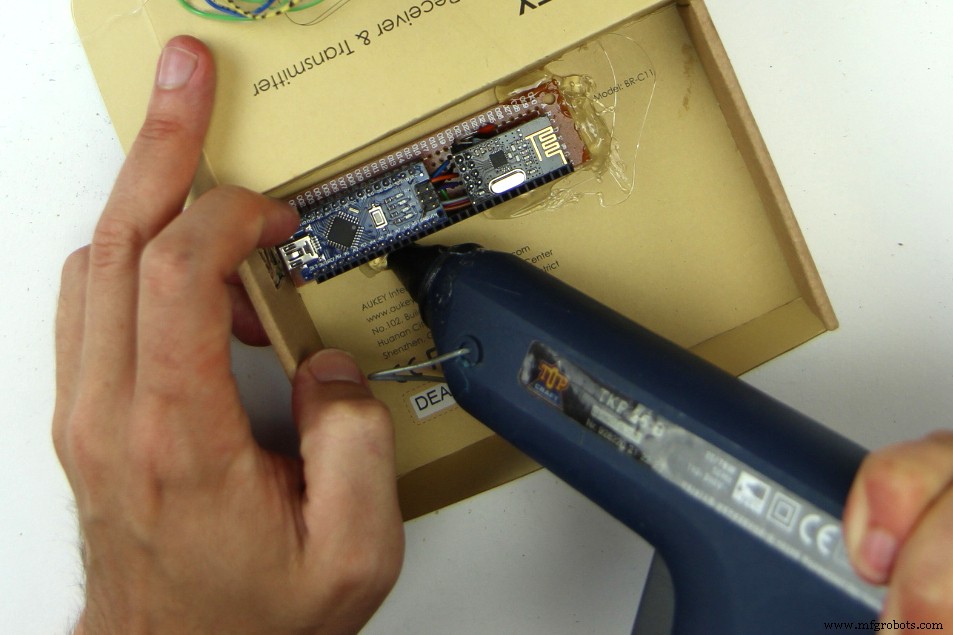
Glue the Receiver board in. Make shure that the USB-C Jack of the Arduino Nano is aligned with the hole that you cut out for the cable connection in the step before.
Next glue in the LED and screw in all the potentiometers. The order how to put them in is the same as in the circuit diagram above:
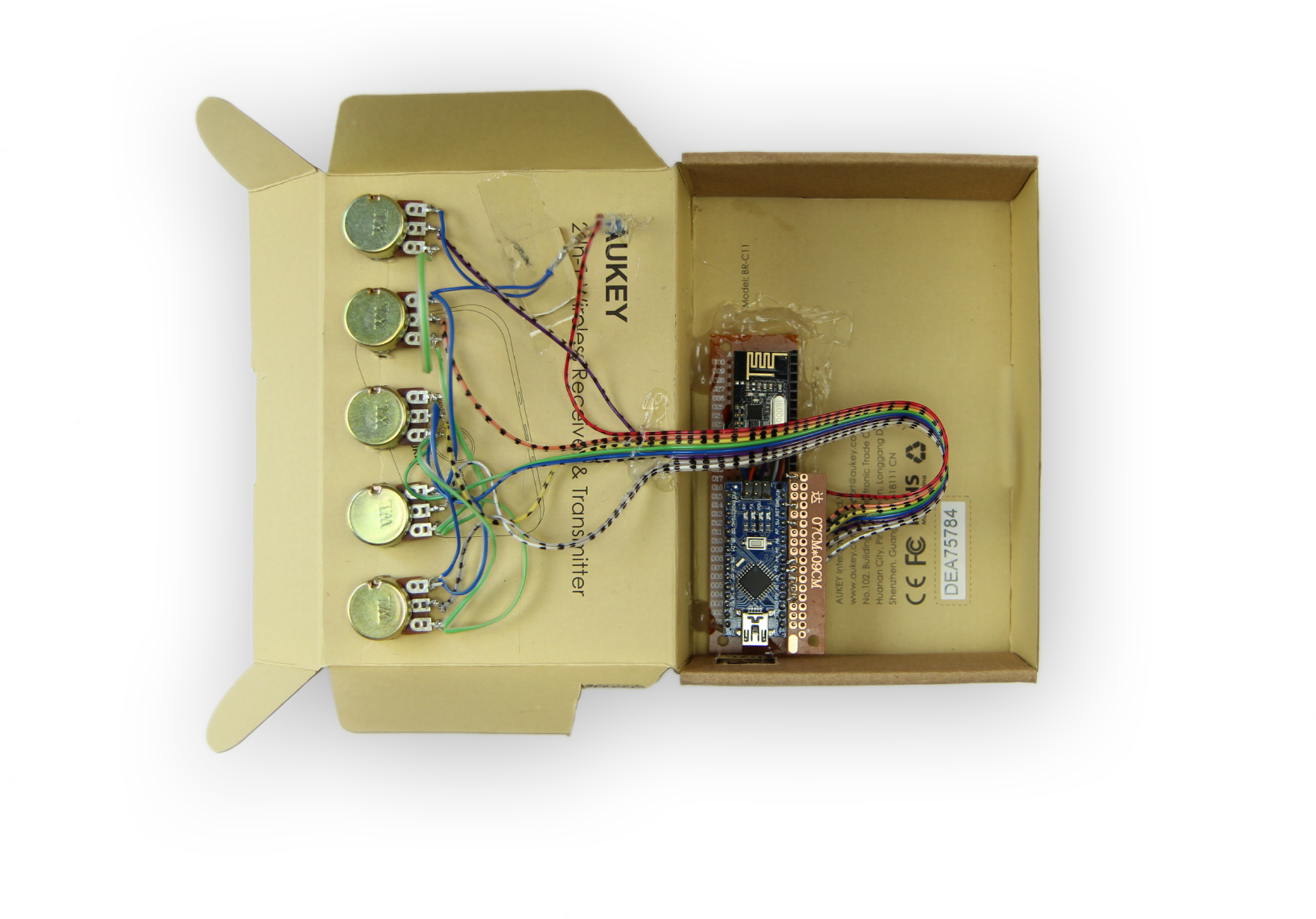
Now you only need to attach the knobs....
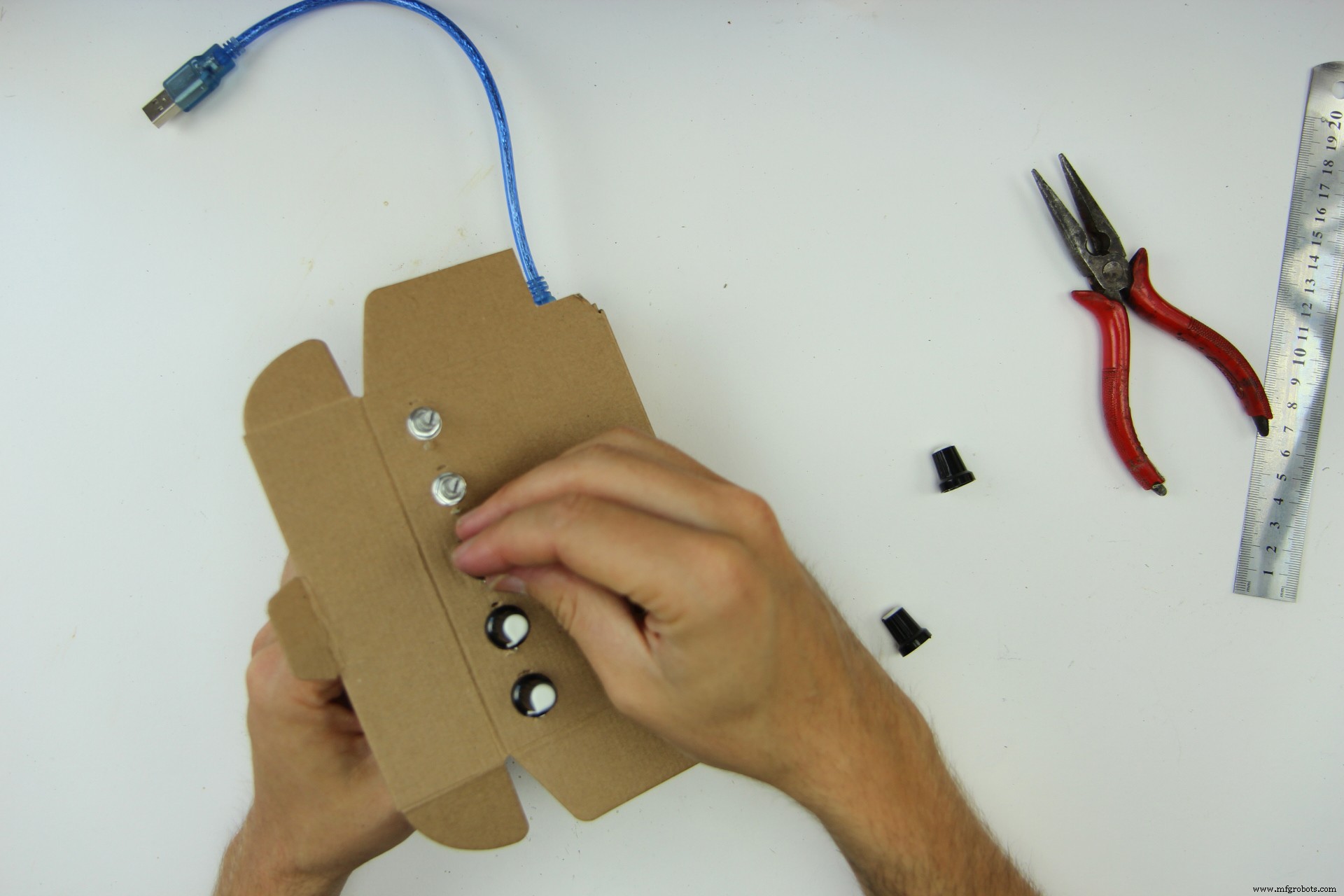
...and the receiver is finished!

Part 7 – Connecting the Receiver to Pure Data
Now that all the hardware is finished, it's time to play some music with it! For that you need software that you can connect the hardware to. For Kravox that software is Pure Data Vanilla that you can download here for free
After installing Pure Data to your computer, start it and open the Kravox.pd file from the attachments. Please note that it needs to be saved on your computer in the same place as the drumsamples folder it comes with - otherwise Pure Data cannot find the samples
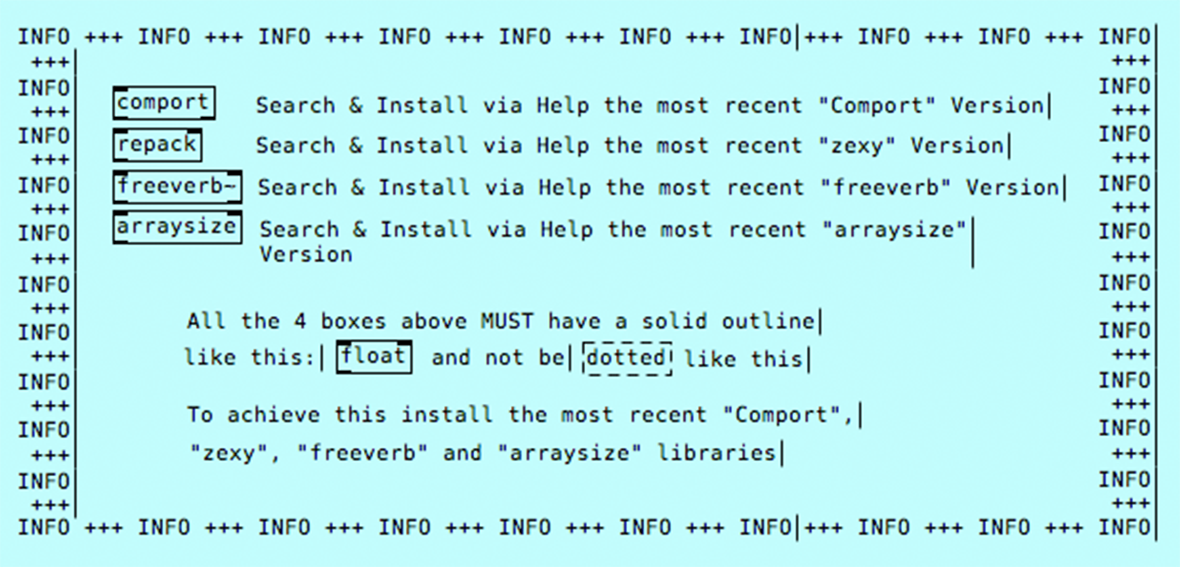
As soon as the Kravox.pd software interface has opened, look for a blue-info box and install the four so-called externals that are listed in the box. Installing them is straightforward:Just click on "help" in the Pure Data Menu, choose "Find additional objects on the internet" (might be phrased slightly different), search for "comport", "zexy", "freeverb" and "arraysize" one by one and install the most recent version. Now the four objects labeled, comport, repack, freeverb and arraysize should have a solid outline like in the picture below. You might need to restart Pure Data for that though
After installing the necessary externals you can connect the Receiver Box via USB. If you altered the code in Part 4 to use the Receiver with the Arduino Serial Monitor you need to undo this change first and upload the original code to the receiver's Arduino Nano before connecting and close the Arduino Serial Monitor, so the receiver is not busy trying to talk to it.
Now have a look at Pure Data's log / info window. If you see a rapidly updating data stream that's great because it means that pure data has already found the receiver, but most likely it will instead show you a red message like the one below that refreshes every other moment:
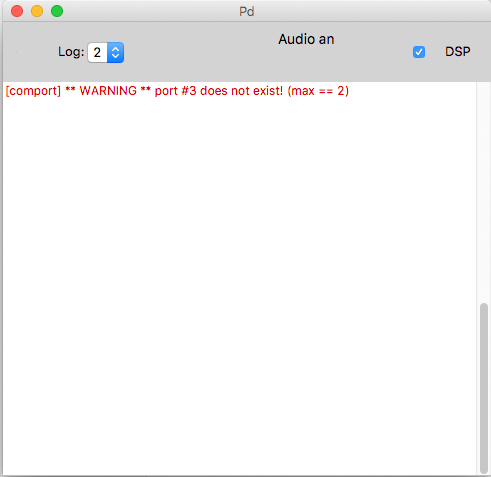
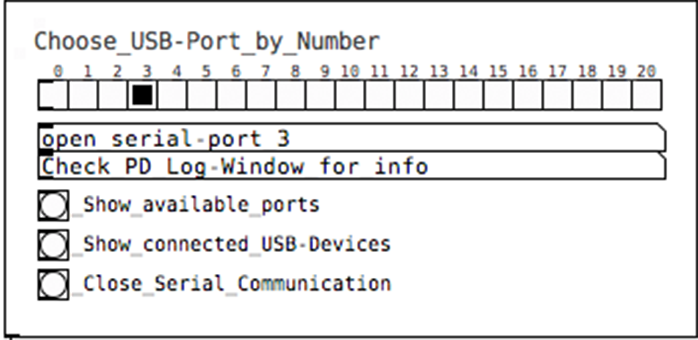
The red message might be a little different, but the result is the same:Pure Data did not yet succeed to connect to your receiver. That is because the program needs to be told, which USB port to listen to. USB-ports are sometimes a bit of a funny thing though:On a 2014 macbook Pro, Pure Data recognizes both USB ports as Serial Port 3, no matter to which you connect the receiver. In Milan I used Kravox with a Lenovo Yoga Pad with only one working USB-Port, that needed to be contacted as Serial Port 6, and recently installed it to another Windows Notebook with two USB-Ports, that wished to be addressed as Serial Ports 8 and 9... So my advice is just to try which number works with your USB-Port. For that I created a simple dialog as part of the Kravox.pd interface, where you can just click through the numbers until one works. You can also try the "Show available ports" and "Show connected USB-devices" buttons – Sometimes, but not very often that also provides useful information. However it takes a while until you get a response in the info window.
You will notice that you have found the right port number and that a connection has been established when the info window shows a data stream like this that updates rapidly:
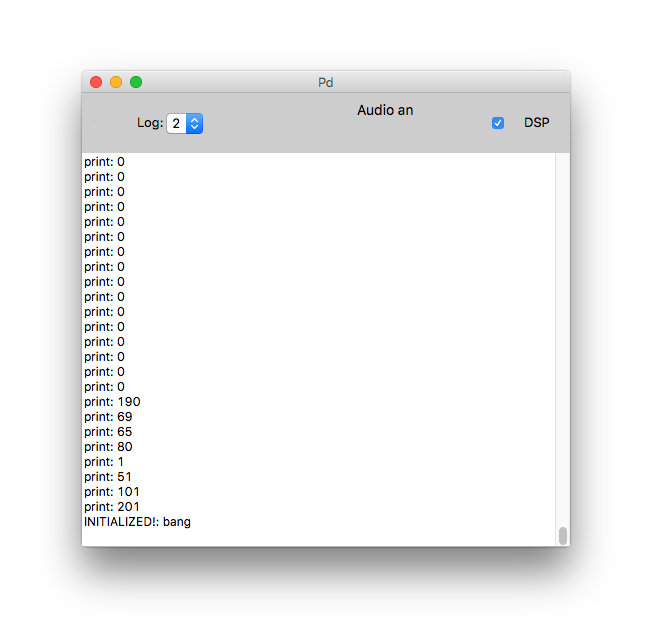
Very good so far! Click save, so Pure Data will attempt to connect to this port the next time it opens automatically.
However we still need to turn the controller on. If you uncommented the last section of the Kravox Controller code in step 2.7 to connect the controller to the Serial Monitor you should upload the original Version again now.
Connect the controller board to the powerbank. When you do this, the touch-interface-enclosure around the the board should be closed and the touch sensitive part of the enclosure should not touch your hands or anything else, as the touch sensors sense their environment when powered up and assume it to be the untouched state
Congratulations – You are done!
Have much fun playing Kravox!
Code
Kravox Code for Arduino and Pure Data
Under this link you can download a Zip-File that contains the Arduino Code for the Kravox controller and the Kravox receiver, the Kravox.pd-file for Pure Data and the necessary drumsamples for the instrument. Please refer to the tutorial for instructions how to use the files.https://github.com/timkrahmer/KravoxSchémas
Processus de fabrication
- Canal et écluse
- Saxophone
- Dulcimer
- Rutronik :SoC et modules sans fil multiprotocoles de Redpine Signals
- Capteur de mouvement utilisant Raspberry Pi
- Les réseaux sans fil 5G pourraient transformer l'IoT et les taxes
- Le contrôle de mouvement intégré à la sécurité permet à la sécurité et à la productivité de coexister
- Connexions pour le contrôle :interfaces de communication pour les capteurs de position et de mouvement
- Comment choisir entre une scie à ruban et une scie circulaire en fonction de ma pièce ?