


Créer un robot mangeur avec Arduino Nano | Vis en or
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Outils et machines nécessaires
 |
|
Applications et services en ligne
 |
| |||
 |
|
À propos de ce projet
L'idée de ce projet est venue de ma fille.
Elle veut un robot, et ce robot peut ouvrir sa bouche pour pouvoir mettre de la nourriture dans sa bouche.
Du coup, j'ai cherché à l'intérieur des trucs qui étaient disponibles :carton, Arduino Nano, capteur à ultrasons, servomoteur...>
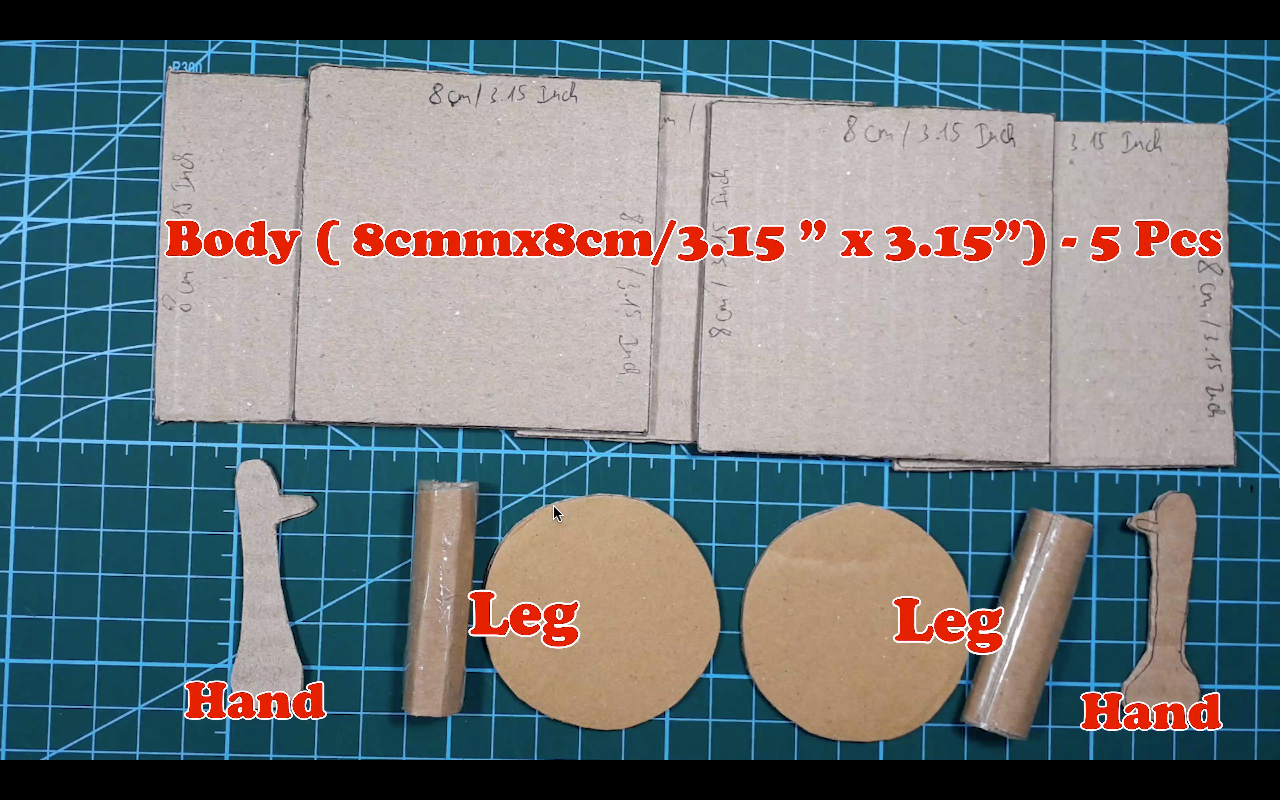
Créer un corps
J'utilise du carton pour faire le corps du robot
Utiliser de la colle chaude pour connecter toutes les pièces
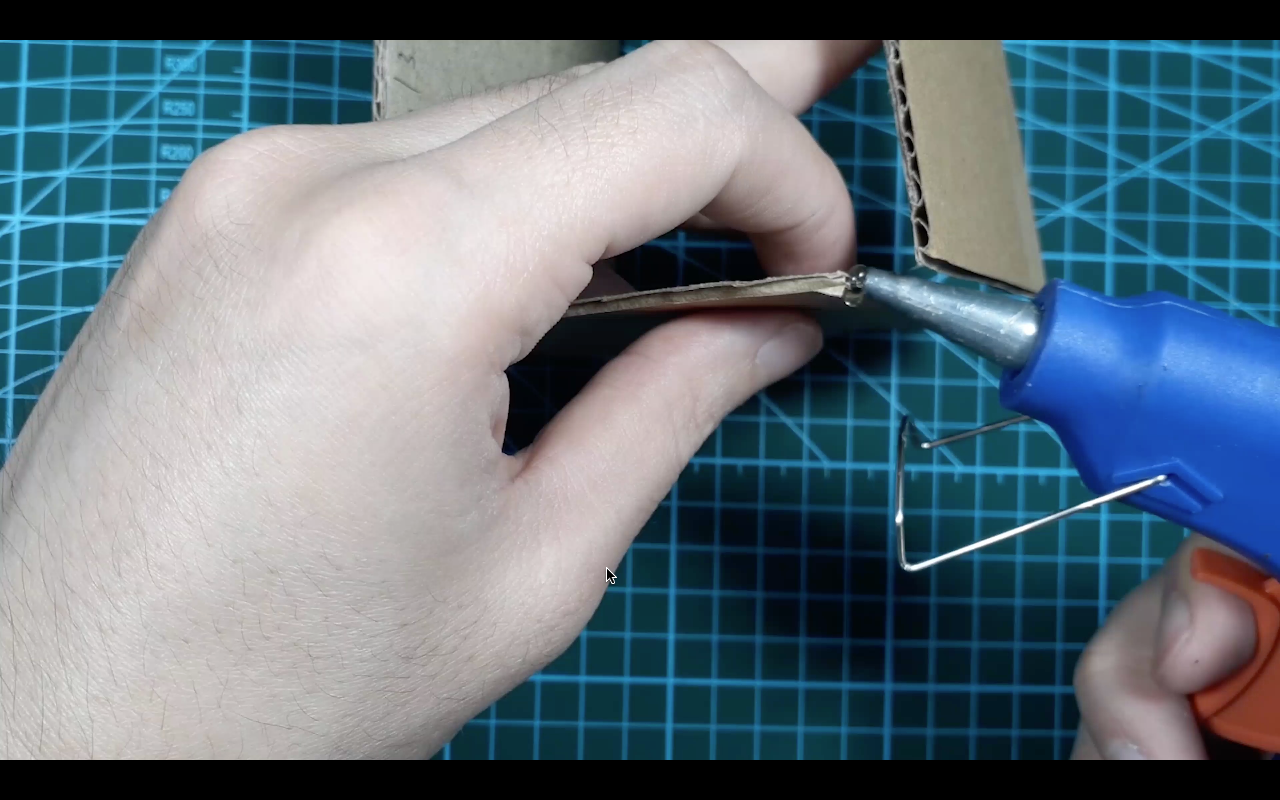
Le plus de corps fait

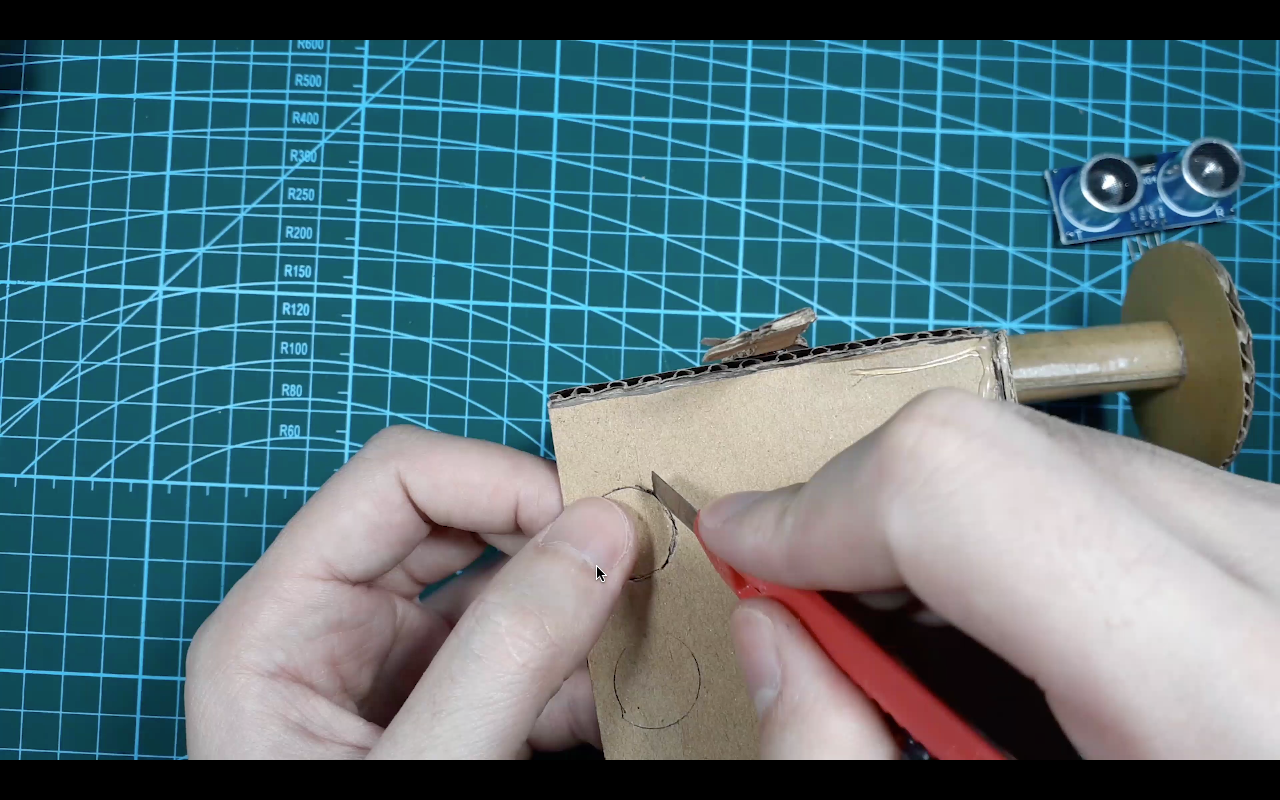
Faire des trous pour les yeux
Faire la gueule
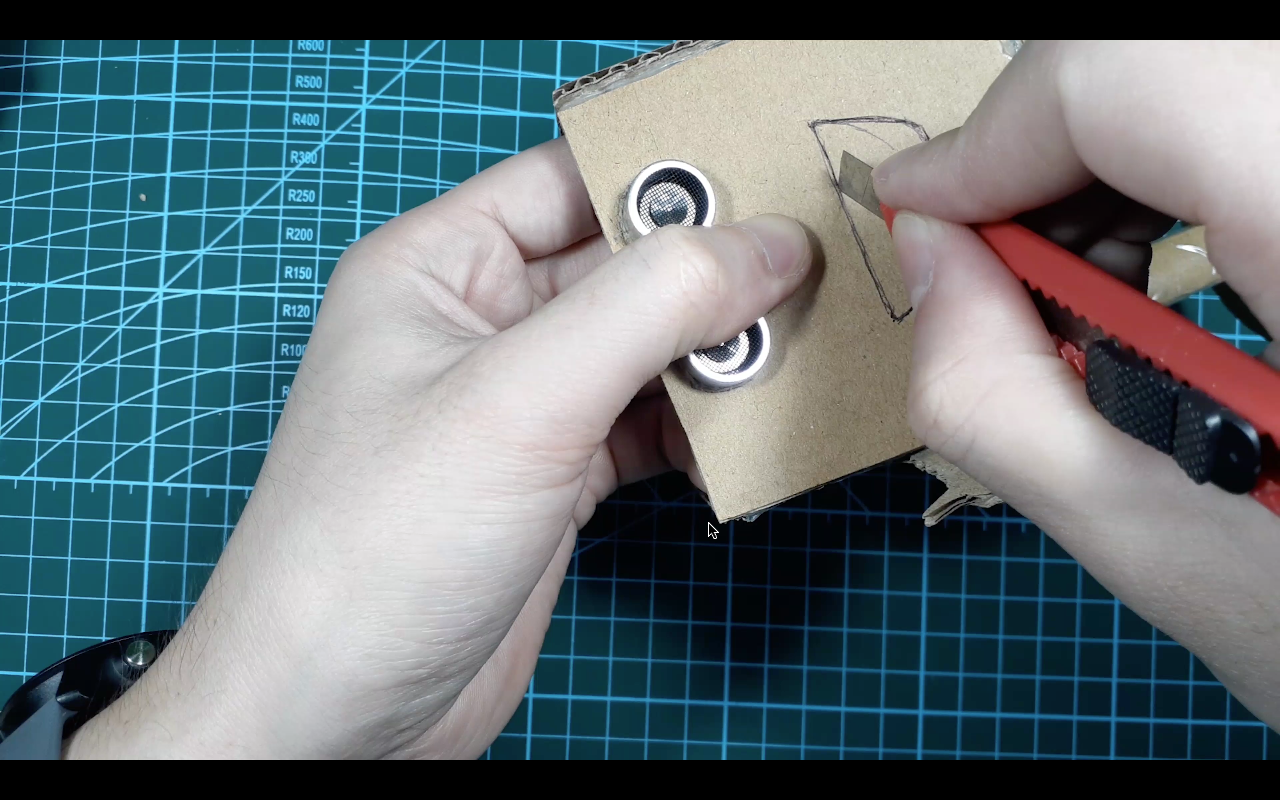
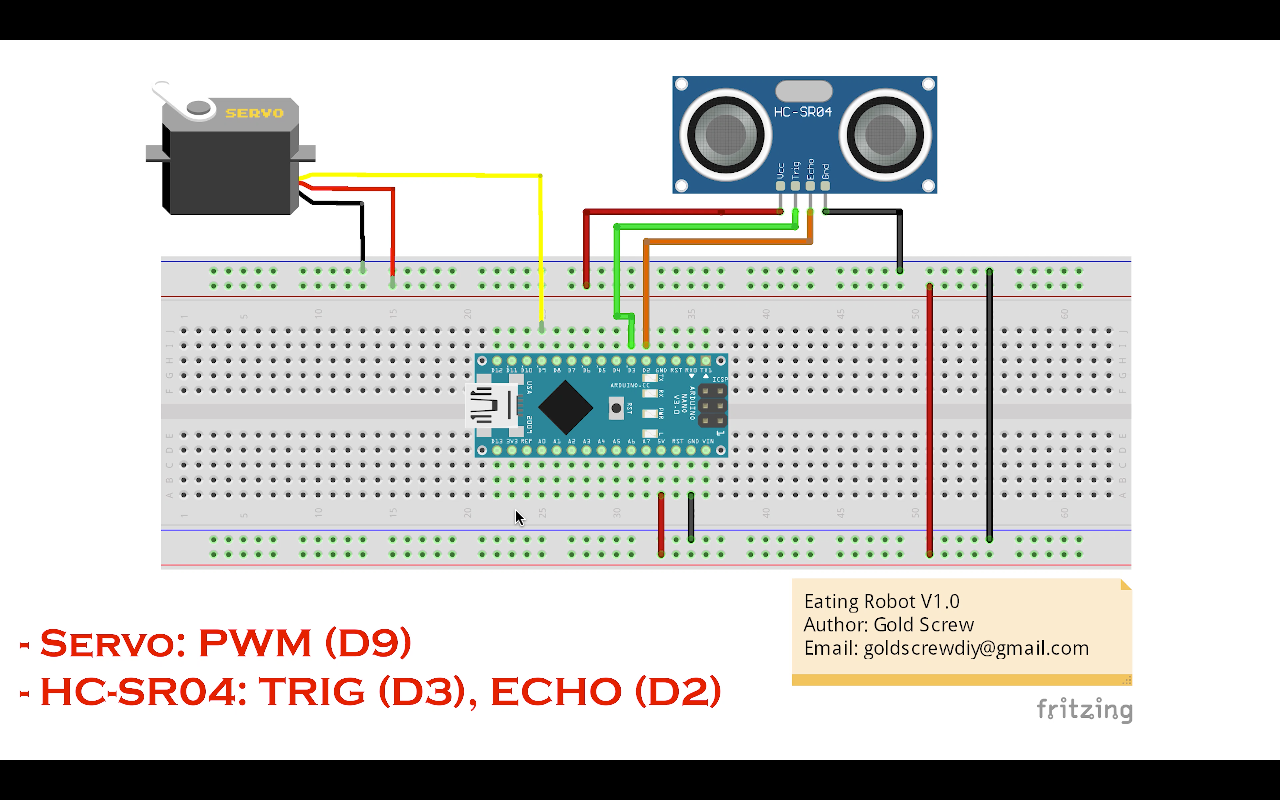
Schéma de connexion des composants/pièces
Connectez l'alimentation USB
Test et débogage
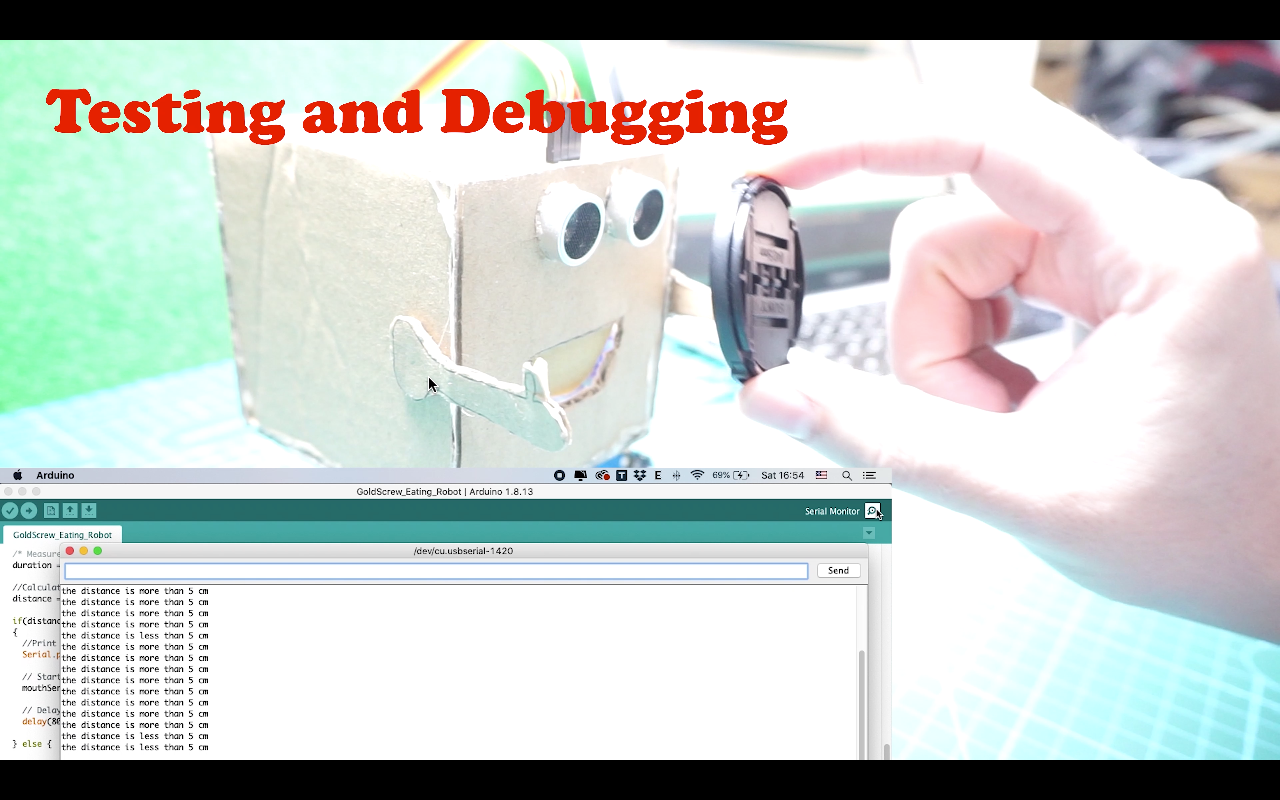
C'est fait !

Code
- GoldScrew_EatingRobot.ino
GoldScrew_EatingRobot.inoArduino
/* * Robot mangeur de carton * Auteur :GoldScrew * E-mail :goldscrewdiy@gmail.com * Description :Il utilise HC-SR04 (Détecter les aliments à distance <=5 cm) et Server (pour ouvrir et fermer la bouche) * / #include#define SERVO_PIN 9 // Définir la broche 9 pour le servo// HC-SR04 ultrasonic sensorconst int trig =3; // trig de HC-SR04const int echo =2; // echo de HC-SR04// ServoServo mouthServo;void setup(){ // Connexion série avec baudrate 960 Serial.begin(9600); // Envoie le signal avec TRIG pinMode(trig, OUTPUT); // Recevoir le signal avec ECHO pinMode(echo, INPUT); // Serveur de bouche boucheServo.attach(SERVO_PIN); boucheServo.write(90); }boucle vide (){ /* Durée */ longue durée non signée ; distance int; //Distance /* Envoi du signal depuis la broche TRIG */ digitalWrite(trig, 0); //Arrêter le délai de la broche de déclenchementMicroseconds(2) ; //Délai de 2 microsecondes digitalWrite(trig, 1); //Envoyer le signal de la broche TRIG delayMicroseconds(10) ; //Délai de 10 microsecondes digitalWrite(trig, 0); //Arrêter la broche de déclenchement /* Mesurer la largeur d'impulsion HAUTE à la broche ECHO */ duration =pulseIn(echo, HIGH); //Calculer la distance distance =int(duration/2/29.412); if(distance <=5) { //Print distance Serial.println("la distance est inférieure à 5 cm"); // Lancer la bouche ouverte mouthServo.write(0); // Delay delay(1200); } else { //Print distance Serial.println("la distance est supérieure à 5 cm"); // Ferme la bouche mouthServo.write(90); } // Delay delay(200);}
Schémas
Processus de fabrication
- Jeu de gyroscope Arduino avec MPU-6050
- Unopad - Contrôleur MIDI Arduino avec Ableton
- Obstacles pour éviter le robot avec servomoteur
- Capteur d'obstacles simple avec Arduino
- Arduino Nano :contrôler 2 moteurs pas à pas avec joystick
- Robot piano contrôlé par Arduino :PiBot
- Compteur Geiger portable avec Arduino Nano
- Comment faire de la musique avec un Arduino
- Comment créer une ouverture de porte automatique basée sur Arduino