


Arduino Nano :contrôler 2 moteurs pas à pas avec joystick
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 |
Applications et services en ligne
 |
| |||
 |
|
À propos de ce projet
Lors de la construction de Arduino projets avec moteurs pas à pas , tels que CNC machine, traceur , ou Art animé , il arrive un moment où les steppers doivent être contrôlés manuellement. Joysticks analogiques sont des modules bon marché et faciles à contrôler manuellement, à vitesse variable. Ils semblent être un bon choix pour contrôler les steppers . Résoudre le problème avec l'Arduino traditionnel le code n'est cependant pas trivial.
Dans ce tutoriel, je vais vous montrer à quel point il est facile de programmer Arduino Nano avec Visuino pour contrôler 2 moteurs pas à pas avec Joystick .
Étape 1 : Composants
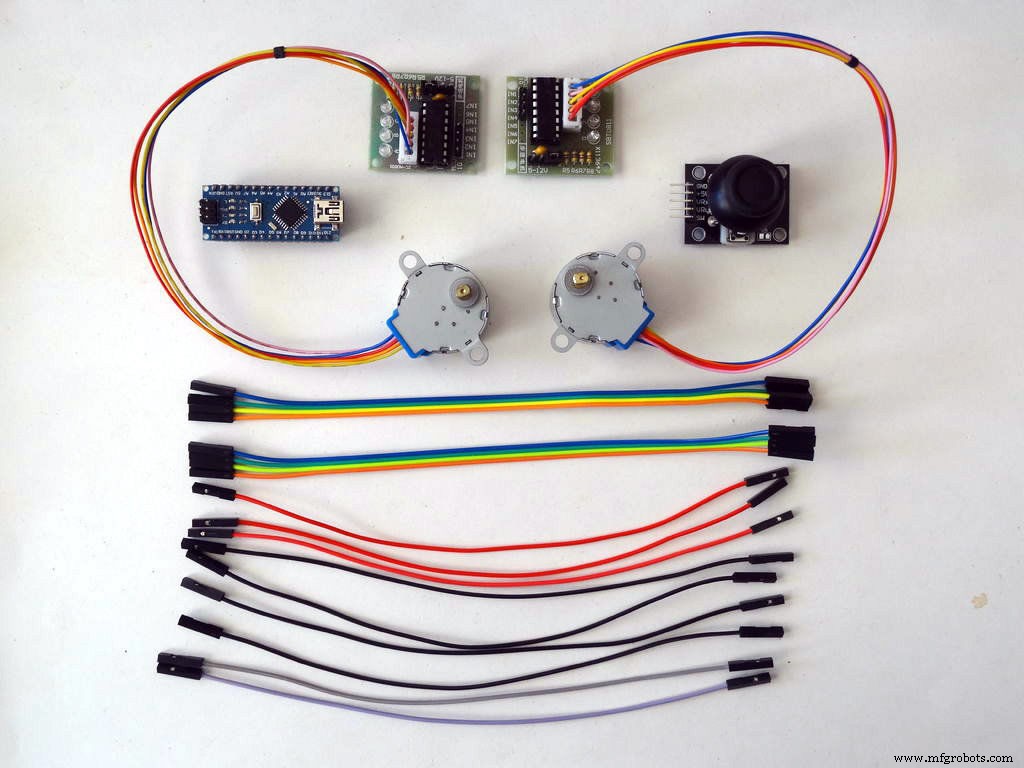
- Un Arduino carte compatible (j'utilise Arduino Nano, car j'en ai une, mais toute autre ira très bien)
- Un Joystick que j'ai obtenu de cet ensemble de 37 capteurs bon marché
- Deux moteurs pas à pas 5 V avec Cartes de pilotage (J'ai utilisé le moteur pas à pas 28BYJ-48 avec la carte pilote ULN2003)
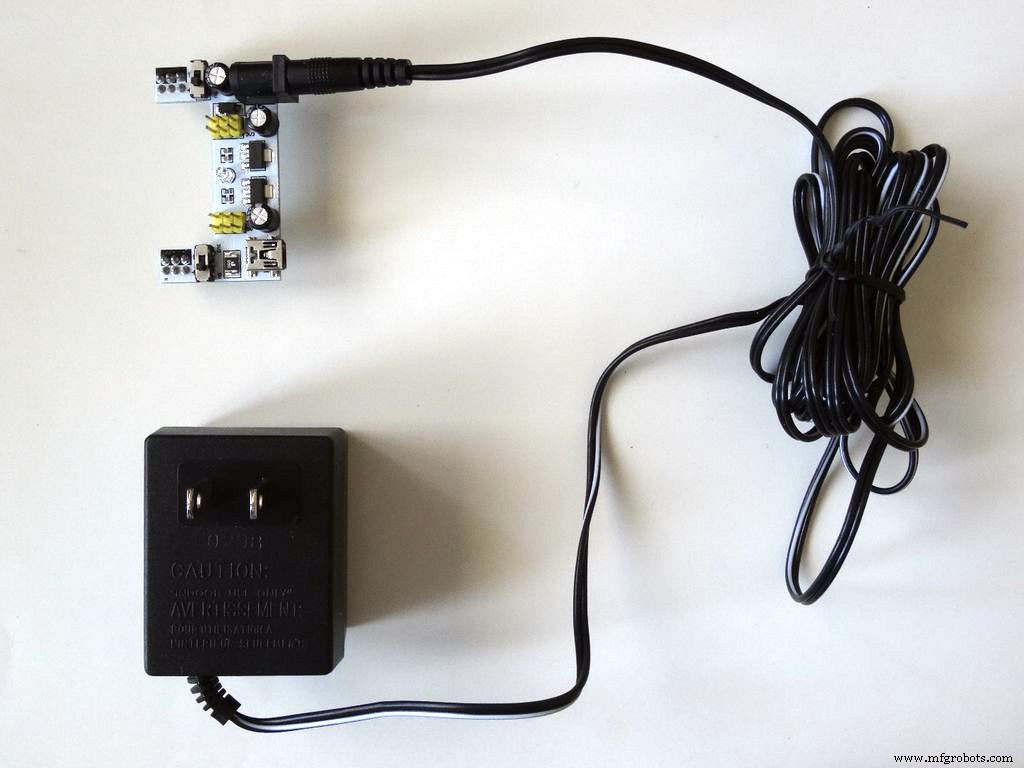
- Une alimentation électrique K2 Breadboard avec adaptateur (Photo 2 ), ou autre source d'alimentation 5V pour les Steppers
- 17 femmes-femmes fils de liaison
Étape 2 : Connectez l'alimentation et mettez à la terre les moteurs pas à pas
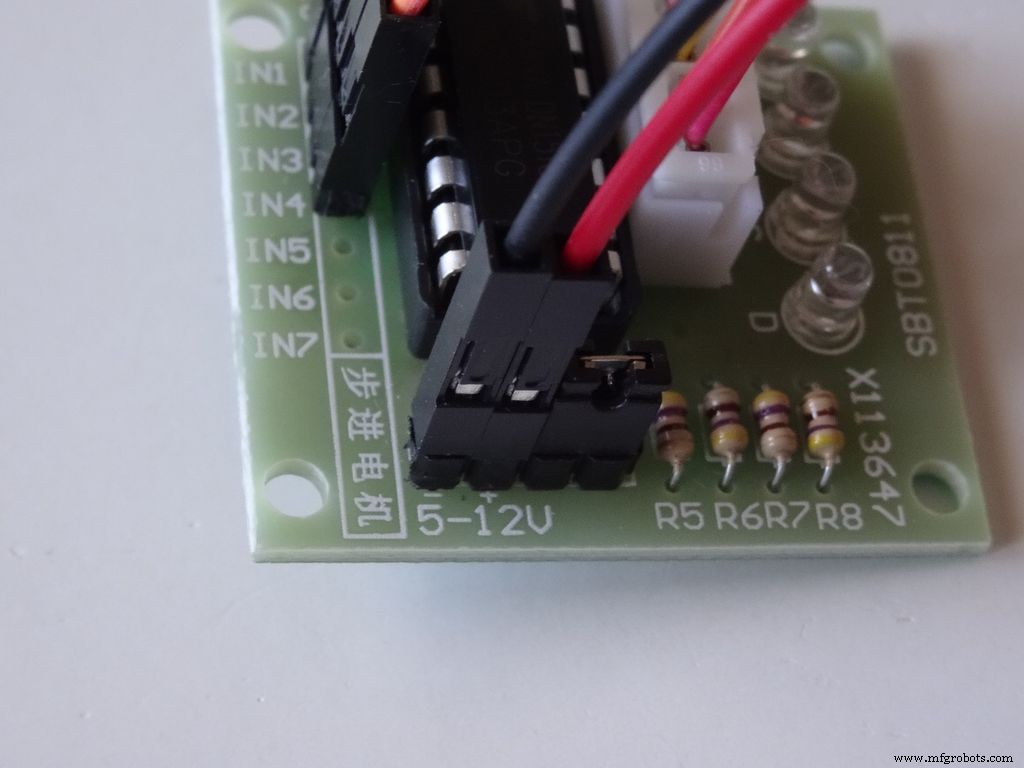

- Connecter Terre (Fil noir ) et Puissance (Fil rouge ), à chacun des modules de pilote pas à pas (Image 1 )
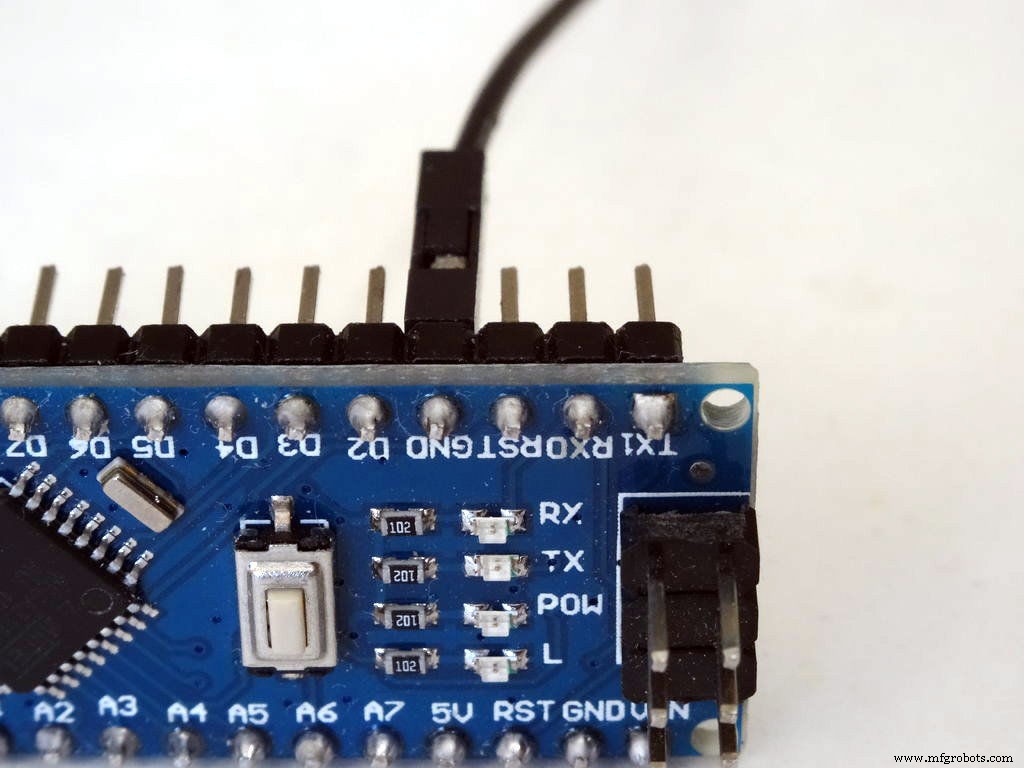
- Connectez une autre terre (Fil noir ) à Sol broche de l'Arduino tableau (Image 2 )
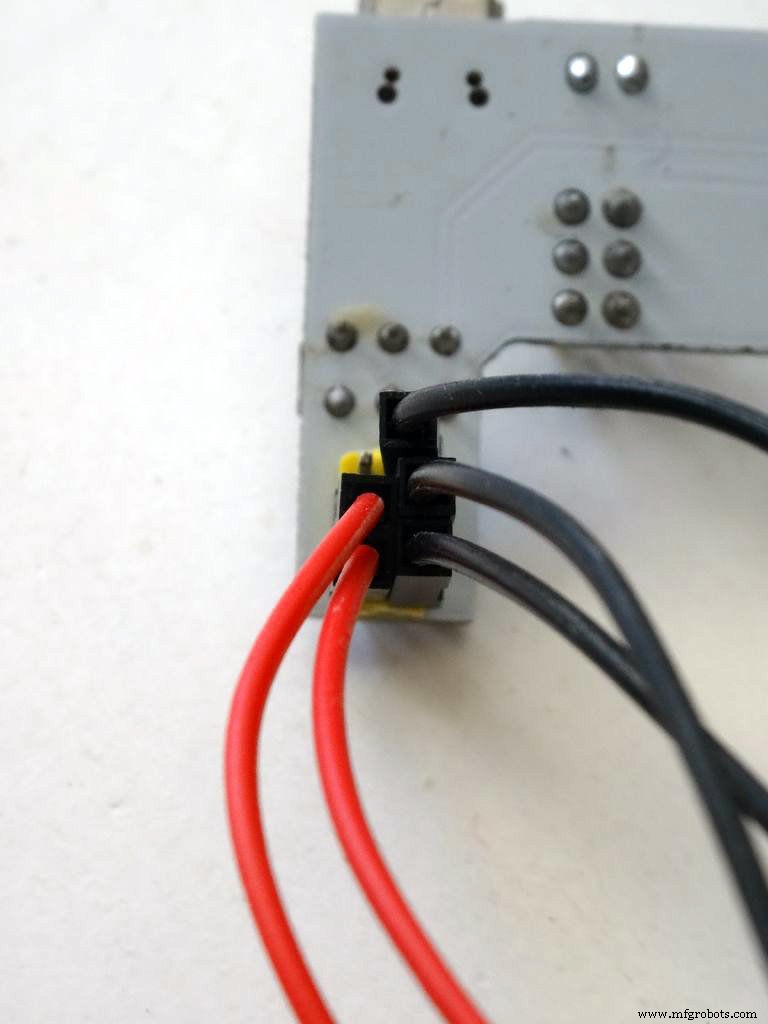
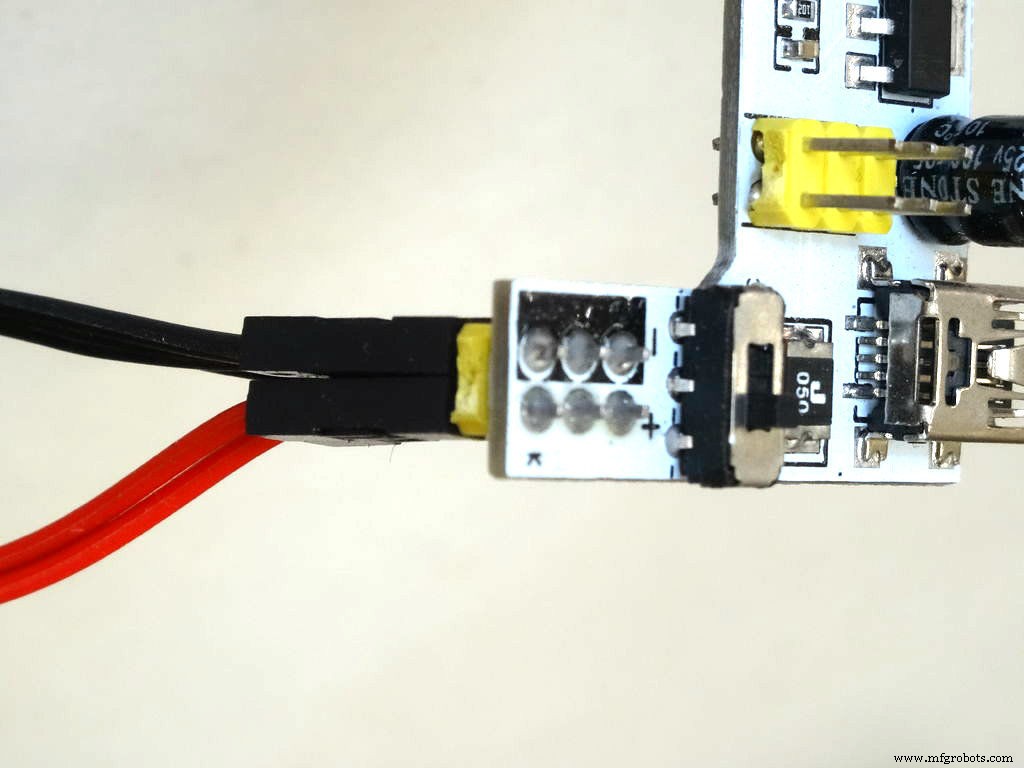
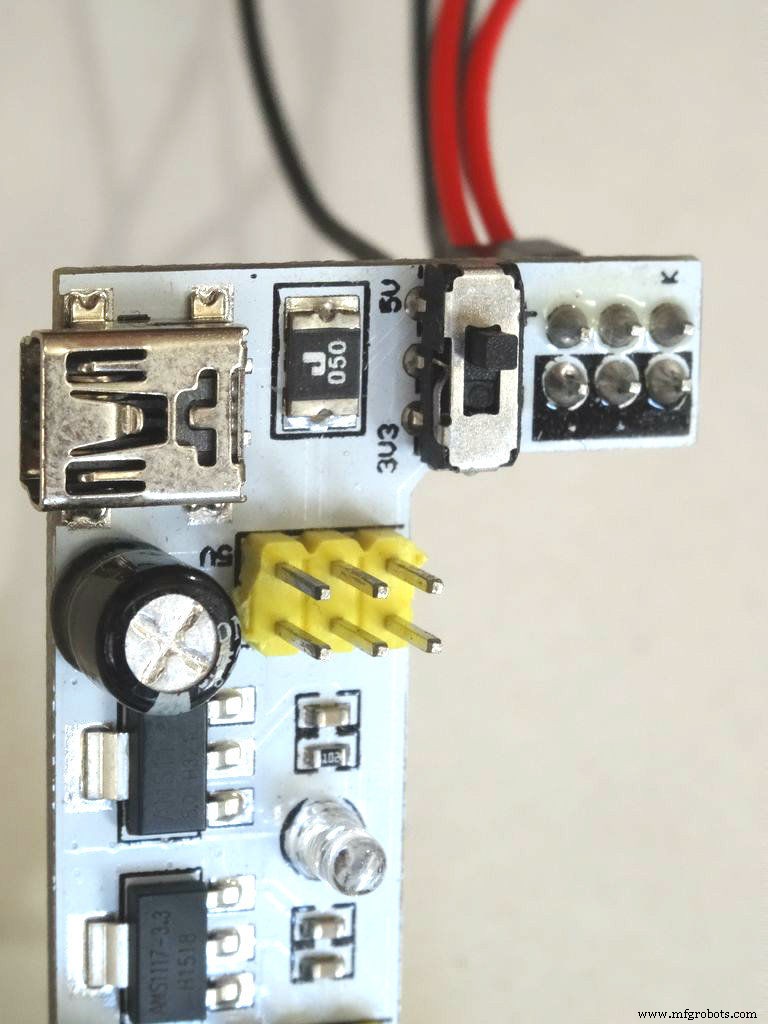
- Connectez l'autre extrémité du Power (Fils rouges ) à partir des modules Motor Driver au "" Puissance broches de l'alimentation K2 (Images 3 et 4 )
- Connectez l'autre extrémité de la terre (Fils noirs ) à partir des modules Motor Driver et de l'Arduino au "- " Terre broches de l'alimentation K2 (Images 3 et 4 )
- Assurez-vous que la sélection d'alimentation Switch de l'alimentation K2 est réglé sur 5 V (Image 5 )
- Image 6 montre où se trouve le Terre broche de l'Arduino Nano
Étape 3 :connectez les moteurs pas à pas à l'Arduino

- Si ce n'est déjà fait, branchez les connecteurs du moteur pas à pas dans les cartes de commande
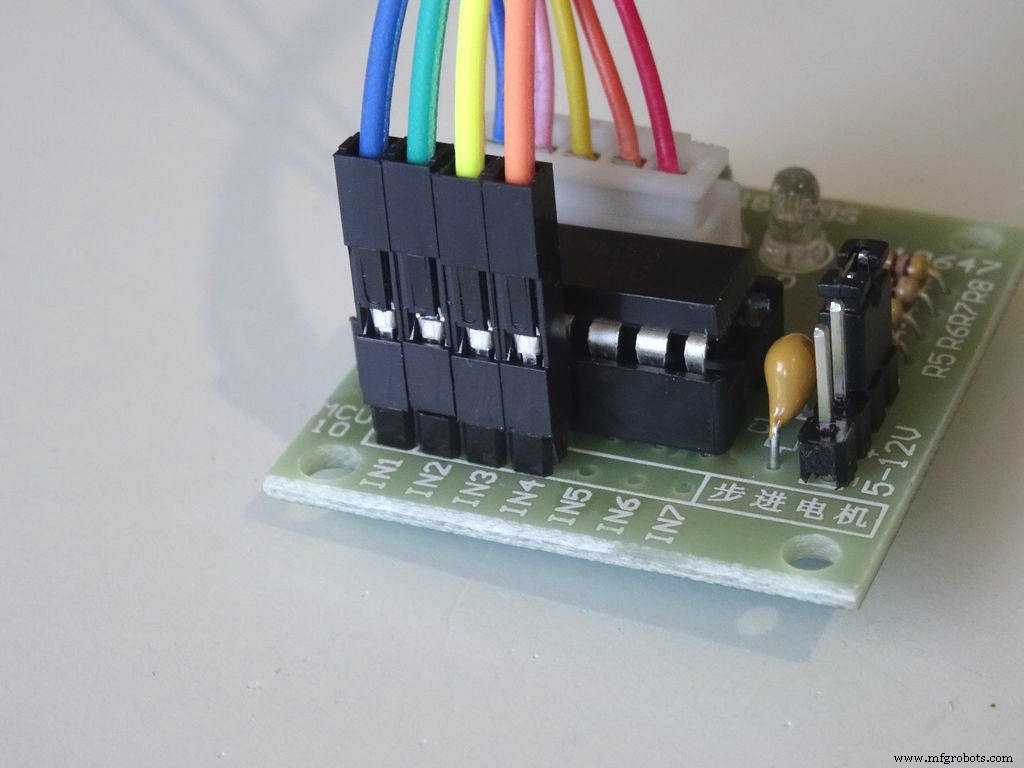
- Connectez une extrémité des fils de raccordement femelle-femelle (Fils Bleu, Vert, Jaune et Orange ) aux broches IN1 à IN4 du pilote pas à pas pour le Premier Moteur (Image 1 )
- Connectez une extrémité des fils de raccordement femelle-femelle (Fils Bleu, Vert, Jaune et Orange ) aux broches IN1 à IN4 du pilote pas à pas pour le deuxième moteur (Image 1 )
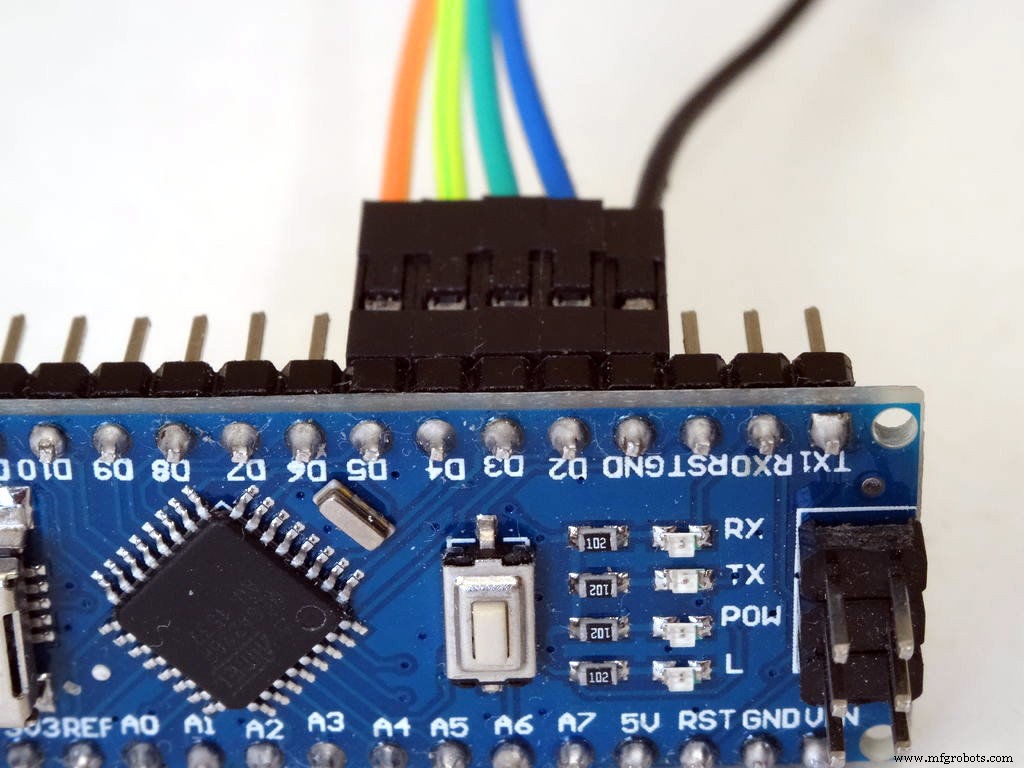
- Connectez le fil IN1 du Premier Moteur (Fil bleu ) à la broche numérique 2 de l'Arduino tableau (Image 2 )
- Connectez le fil IN2 du Premier Moteur (Fil vert ) à la broche numérique 3 de l'Arduino tableau (Image 2 )
- Connectez le fil IN3 du Premier Moteur (Fil jaune ) à la broche numérique 4 de l'Arduino tableau (Image 2 )
- Connectez le fil IN4 du Premier Moteur (Fil orange ) à la broche numérique 5 de l'Arduino tableau (Image 2 )
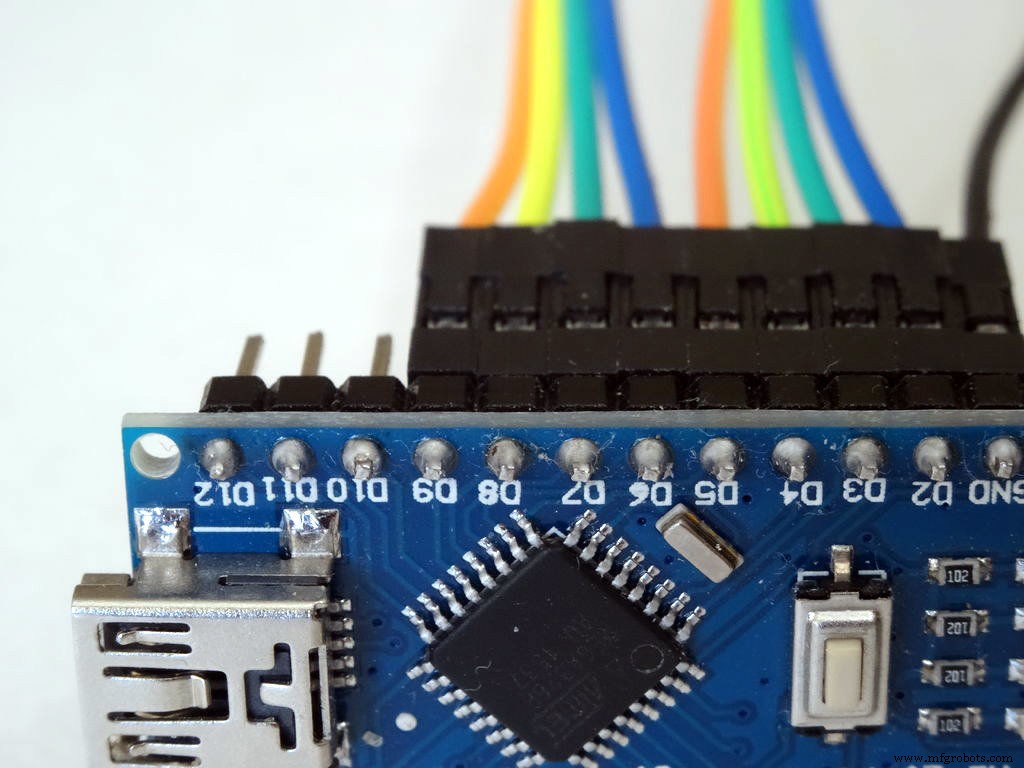
- Connectez le fil IN1 du deuxième moteur (Fil bleu ) à la broche numérique 6 de l'Arduino tableau (Image 3 )
- Connectez le fil IN2 du deuxième moteur (Fil vert ) à la broche numérique 7 de l'Arduino tableau (Image 3 )
- Connectez le fil IN3 du deuxième moteur (Fil jaune ) à la broche numérique 8 de l'Arduino tableau (Image 3 )
- Connectez le fil IN4 du deuxième moteur (Fil orange ) à la broche numérique 9 de l'Arduino tableau (Image 3 )
- Image 4 s'affiche en rouge où sont les Digital 2 à Digital 9 broches de l'Arduino Nano. En bleu s'affiche la connexion effectuée à l'étape précédente.
Étape 4 :connectez le joystick à l'Arduino
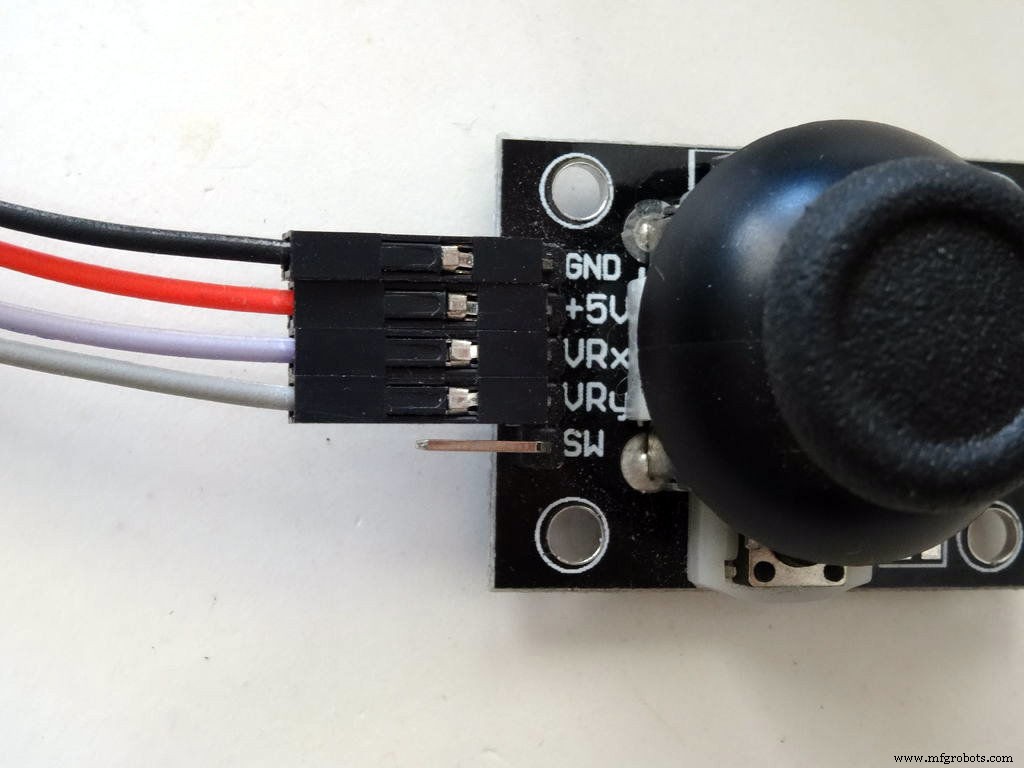
- Connecter Femme-Femme fils à la Masse (Fil noir ), Puissance (Fil rouge ), VRx (Fil violet ), et VRy (Fil gris ) du Joystick comme le montre l'Image 1
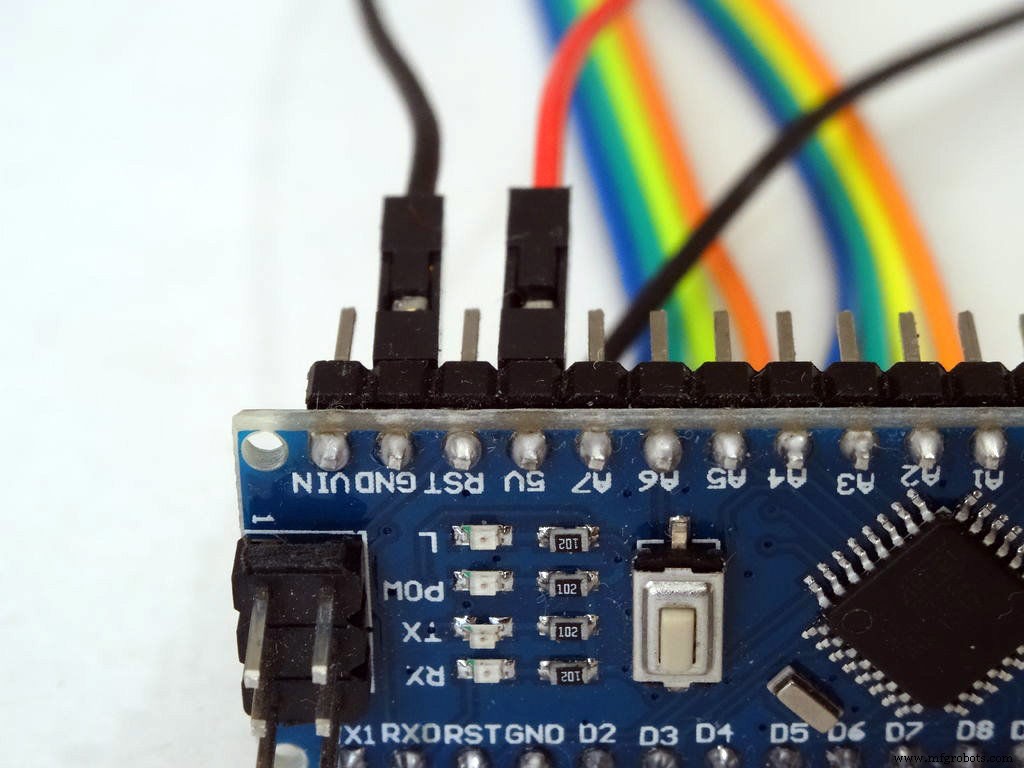
- Connectez le fil de terre (Fil noir ) au Terre broche de l'Arduino tableau (Image 2 )
- Connectez le fil d'alimentation (Fil rouge ) au 5V Pin d'alimentation de l'Arduino (Image 2 )
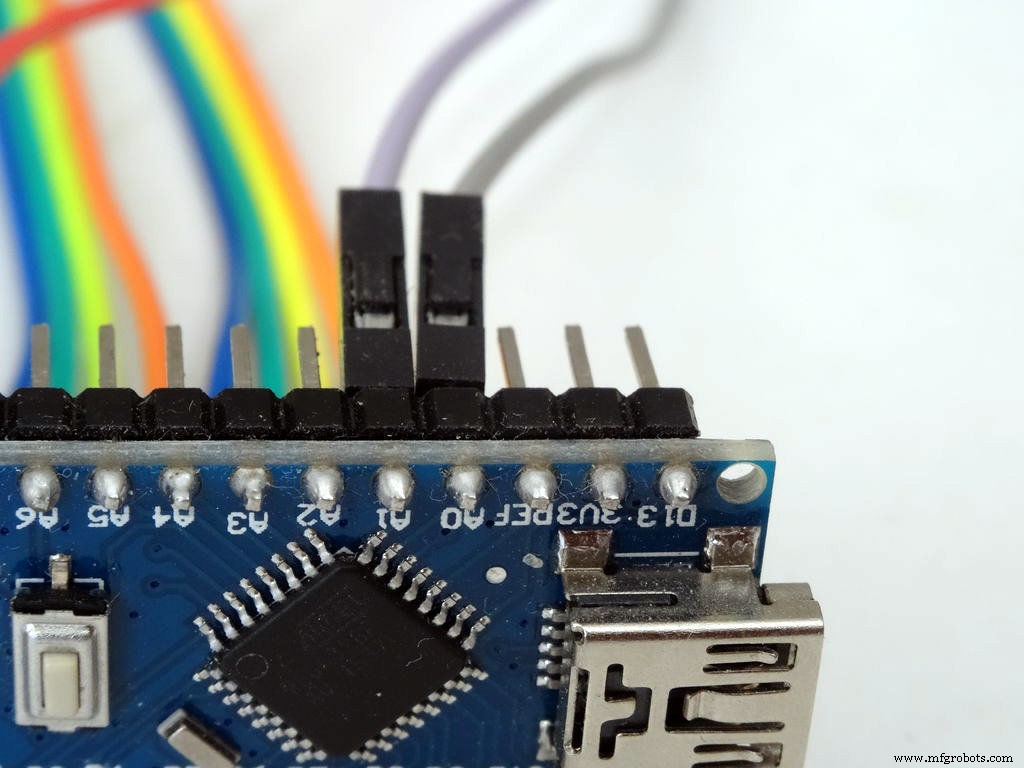
- Connectez le fil VRx (Fil marron ) le Analogique 1 broche de l'Arduino tableau (Image 3 )
- Connectez le fil VRy (Fil gris ) le Analogique 0 broche de l'Arduino tableau (Image 3 )
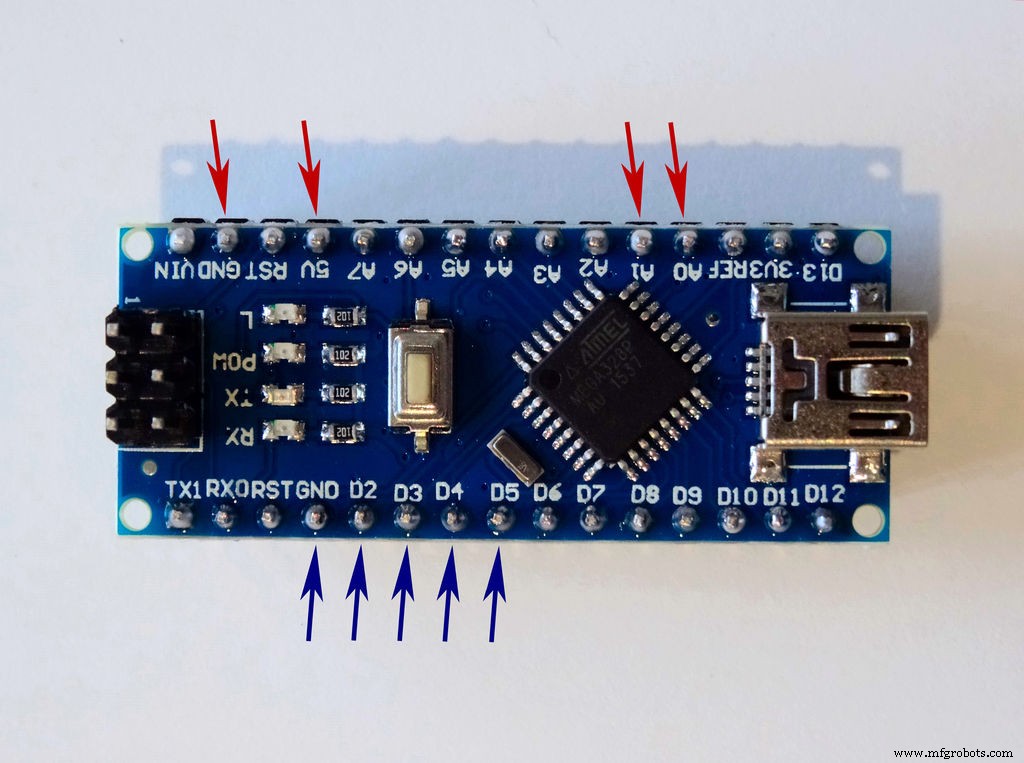
- Image 4 s'affiche en rouge où sont les Terre , 5V Puissance, Analogique 0 , et Analogique 1 broches de l'Arduino Nano. En bleu est montré la connexion effectuée dans les étapes précédentes.
Étape 5 :Démarrez Visuino et sélectionnez le type de carte Arduino
Pour commencer à programmer l'Arduino, vous aurez besoin de l'Arduino IDE installé à partir d'ici :http://www.arduino.cc/ .
Assurez-vous d'installer la version 1.6.7 supérieure, sinon ce tutoriel ne fonctionnera pas !
Le Visuino :https://www.visuino.com doit également être installé.
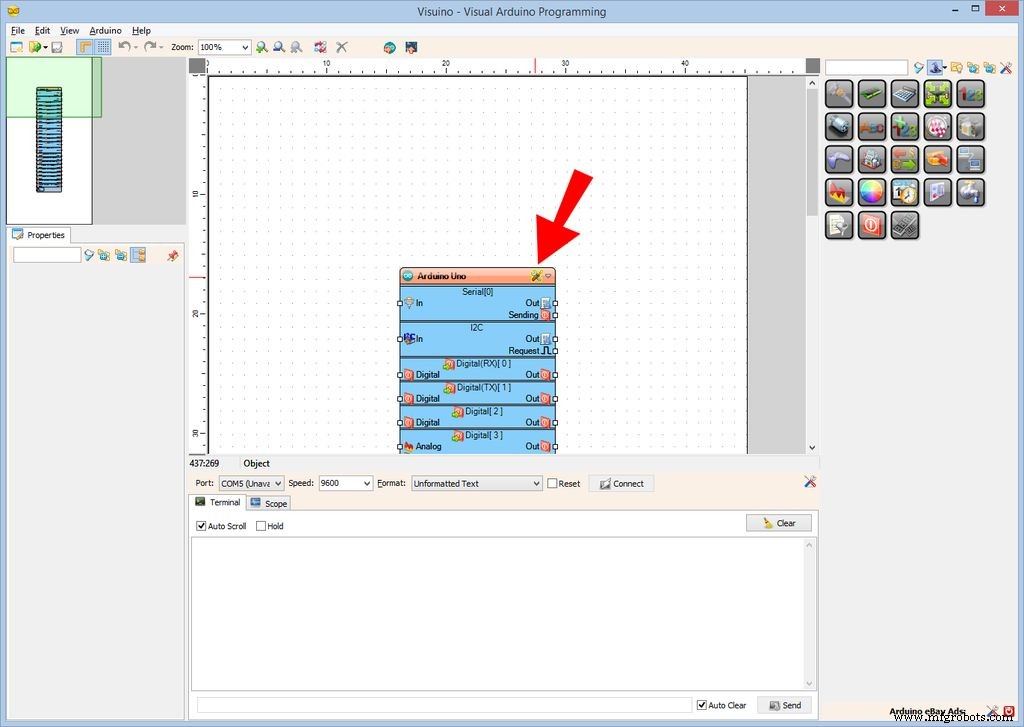
- Démarrer Visuino comme le montre la première image
- Cliquez sur "Outils " sur le composant Arduino (Image 1 ) dans Visuino
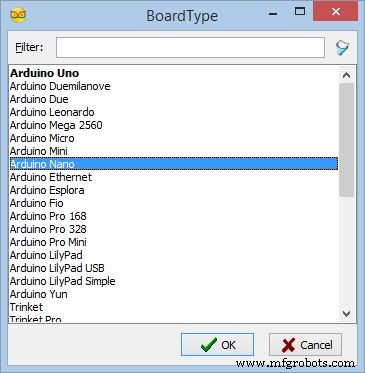
- Lorsque la boîte de dialogue apparaît, sélectionnez Arduino Nano comme le montre l'Image 2
Étape 6 :Dans Visuino :ajoutez et connectez les composants du moteur pas à pas

Nous devons d'abord ajouter des composants pour contrôler les moteurs pas à pas :
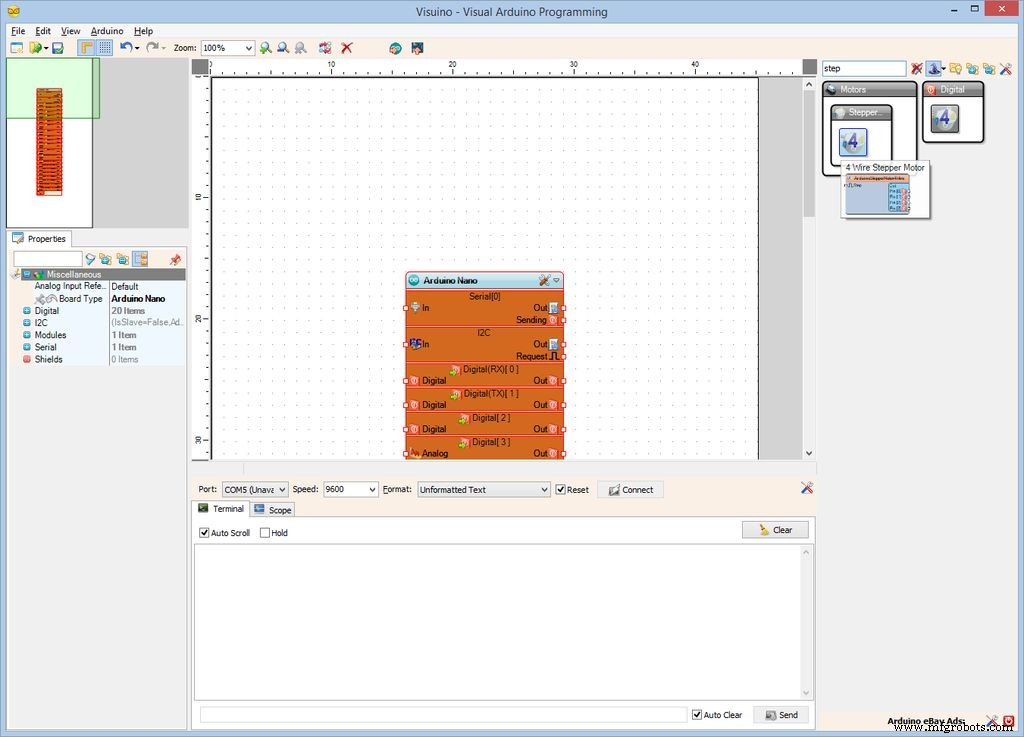
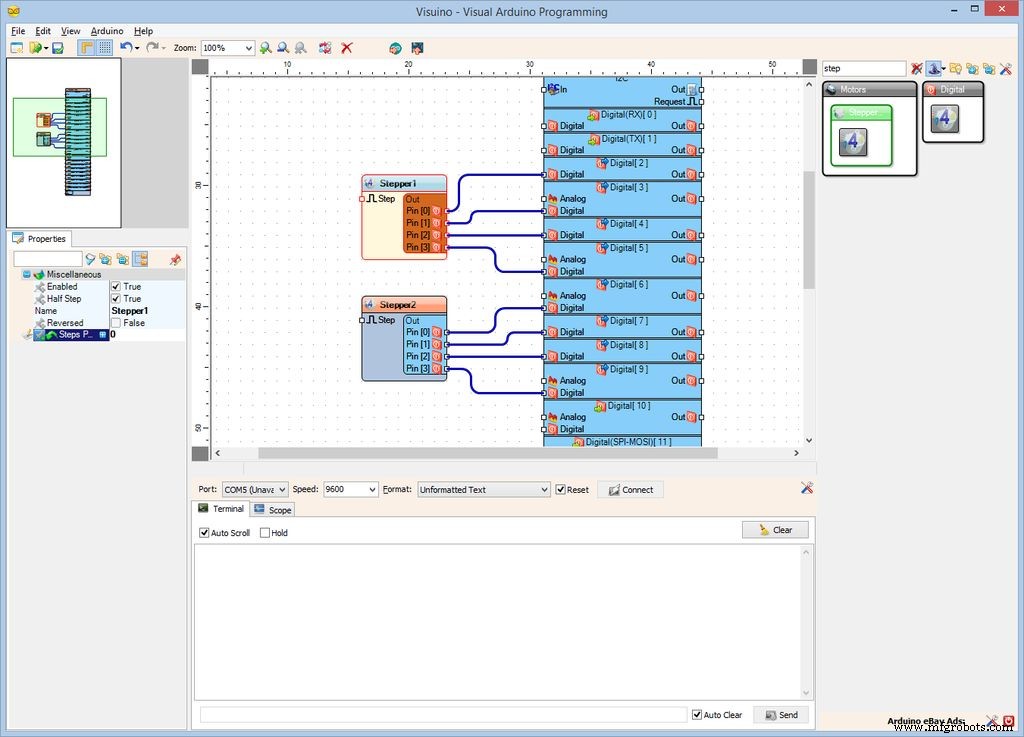
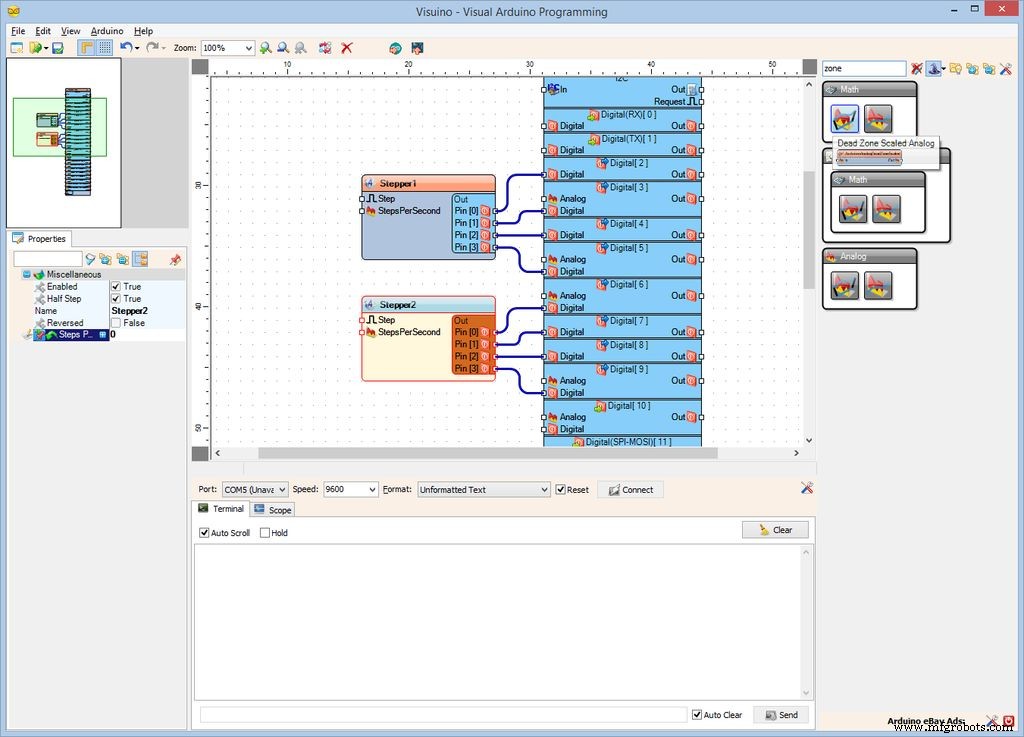
- Tapez "étape " dans la zone Filtre de la boîte à outils des composants, puis sélectionnez le "Moteur pas à pas à 4 fils composant " (Image 1 ), et supprimez deux d'entre eux dans la zone de conception
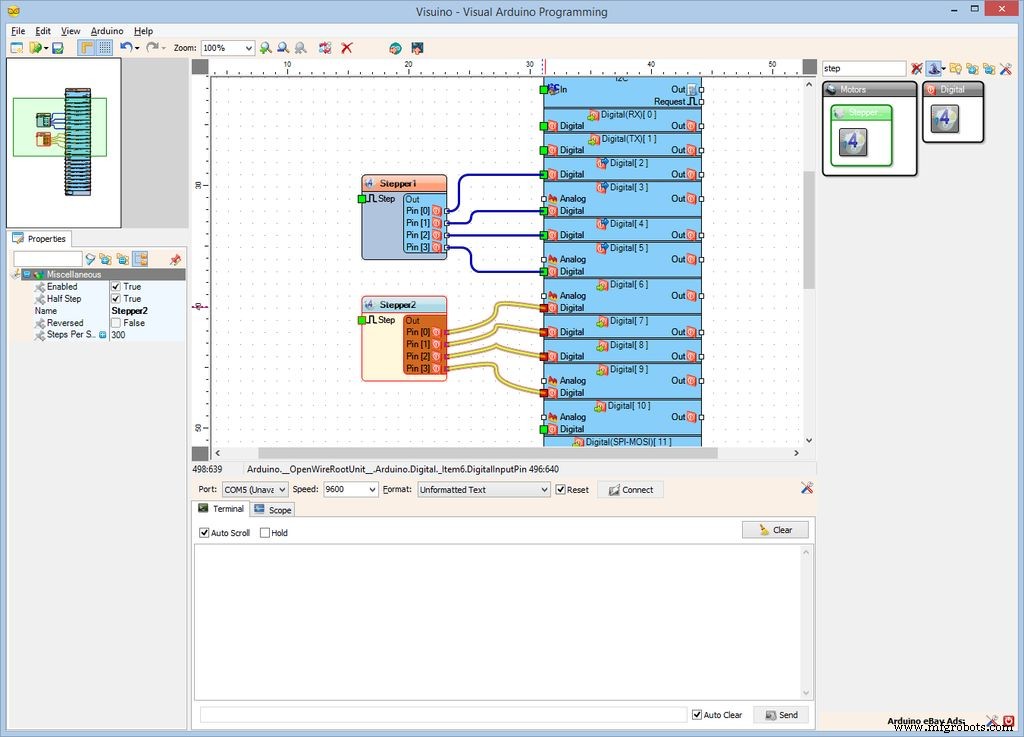
- Cliquez sur "Sortie " boîte contenant les broches du Stepper1 composant pour commencer à connecter toutes les broches de sortie à la fois (Image 2 )
- Déplacez la souris sur le "Digital " broche d'entrée du "Digital[ 2 ] " canal de l'Arduino composant. Le Visuino étendra automatiquement les fils afin qu'ils se connectent correctement au reste des broches (Image 2 )
- Cliquez sur "Sortie " boîte contenant les broches du Stepper2 composant pour commencer à connecter toutes les broches de sortie à la fois (Image 3 )
- Déplacez la souris sur le "Digital " broche d'entrée du "Digital[ 6 ] " canal de l'Arduino composant. Le Visuino étendra automatiquement les fils afin qu'ils se connectent correctement au reste des broches (Image 3 )
Étape 7 :Dans Visuino :définissez les propriétés du composant du moteur pas à pas et ajoutez des broches pour contrôler la vitesse
Puisque nous voulons contrôler la vitesse des steppers, nous devons ajouter des broches à la propriété "Pas par seconde":
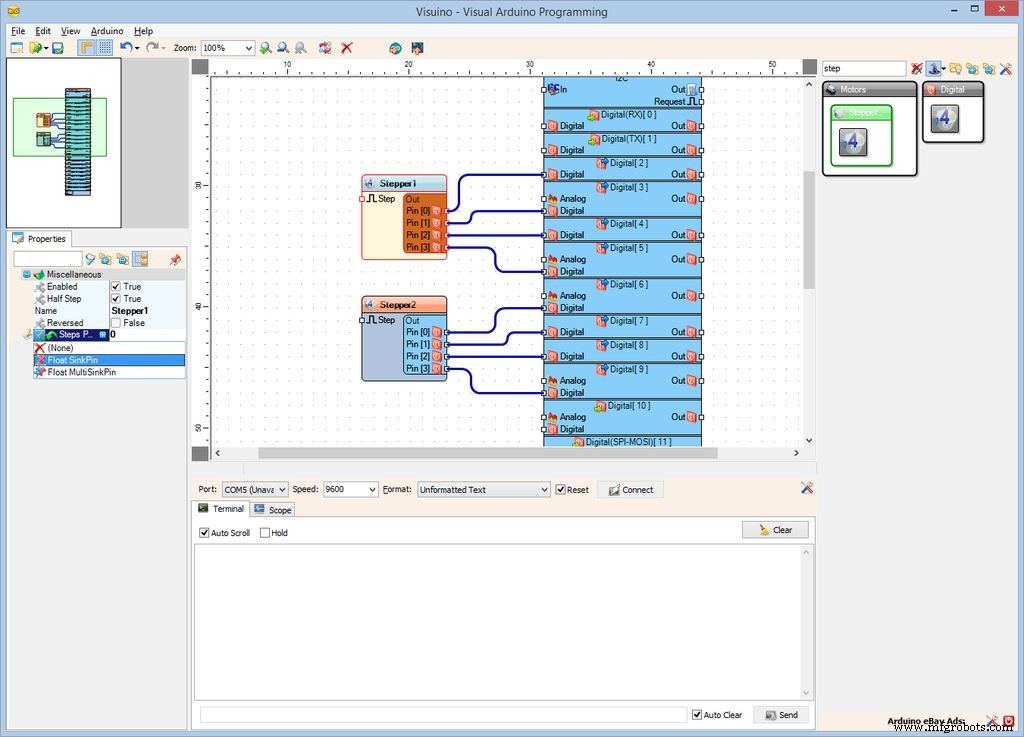
- Sélectionnez le Stepper1 composant (Image 1 )
- Dans l'inspecteur d'objets, définissez la valeur des "Pas par seconde " propriété à "0 " (Image 1 )
- Dans l'inspecteur d'objets, cliquez sur l'Épingle devant le bouton "Pas par seconde " et sélectionnez "Float SinkPin " (Image 2 )
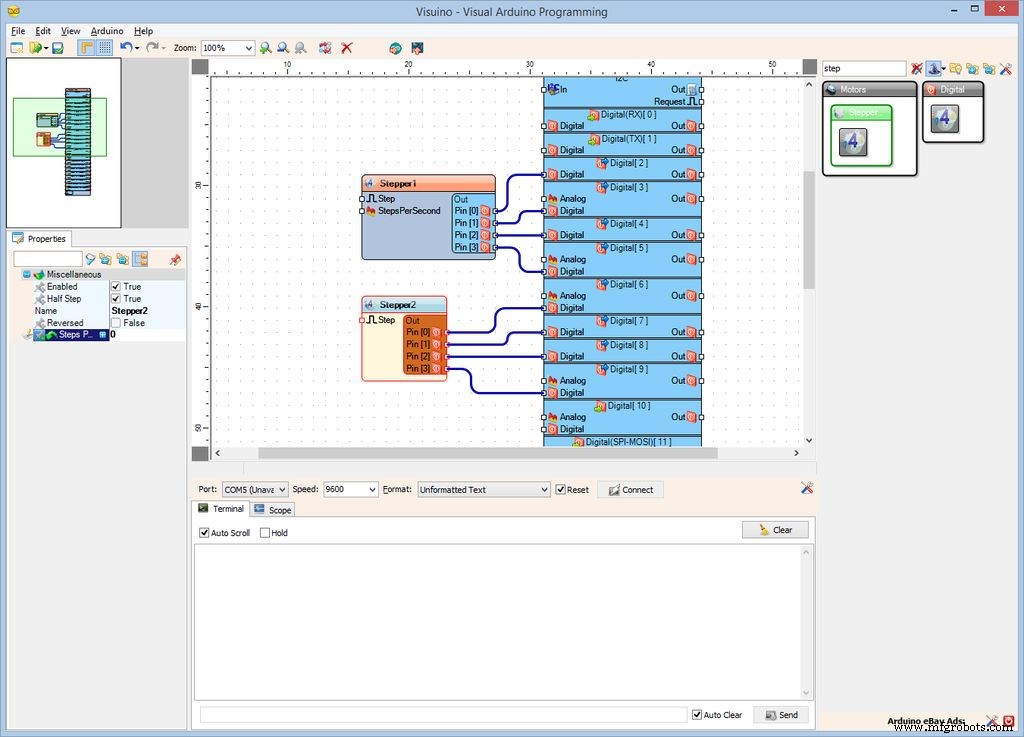
- Sélectionnez le stepper2 composant (Image 3 )
- Dans l'inspecteur d'objets, définissez la valeur des "Pas par seconde " propriété à "0 " (Image 3 )
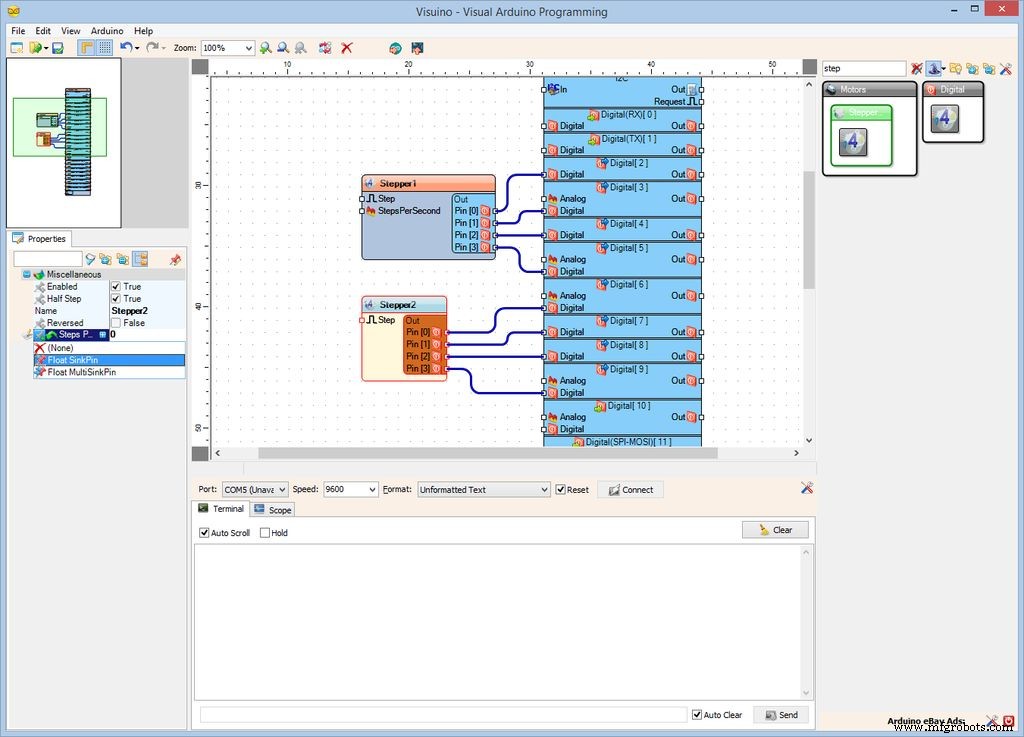
- Dans l'inspecteur d'objets, cliquez sur l'Épingle devant le bouton "Pas par seconde " et sélectionnez "Float SinkPin " (Image 4 )
Étape 8 :Dans Visuino :ajoutez et connectez des composants analogiques à l'échelle de la zone morte
Les broches analogiques où le joystick est connecté génèrent des valeurs normalisées entre 0,0 et 1,0. Nous devons les convertir en +/-300 pas par seconde. Étant donné que le joystick n'est pas très précis lorsqu'il est en position centrale relâchée, nous voulons qu'une petite zone autour du centre soit considérée comme 0,5, nous devons donc introduire la "zone morte" :
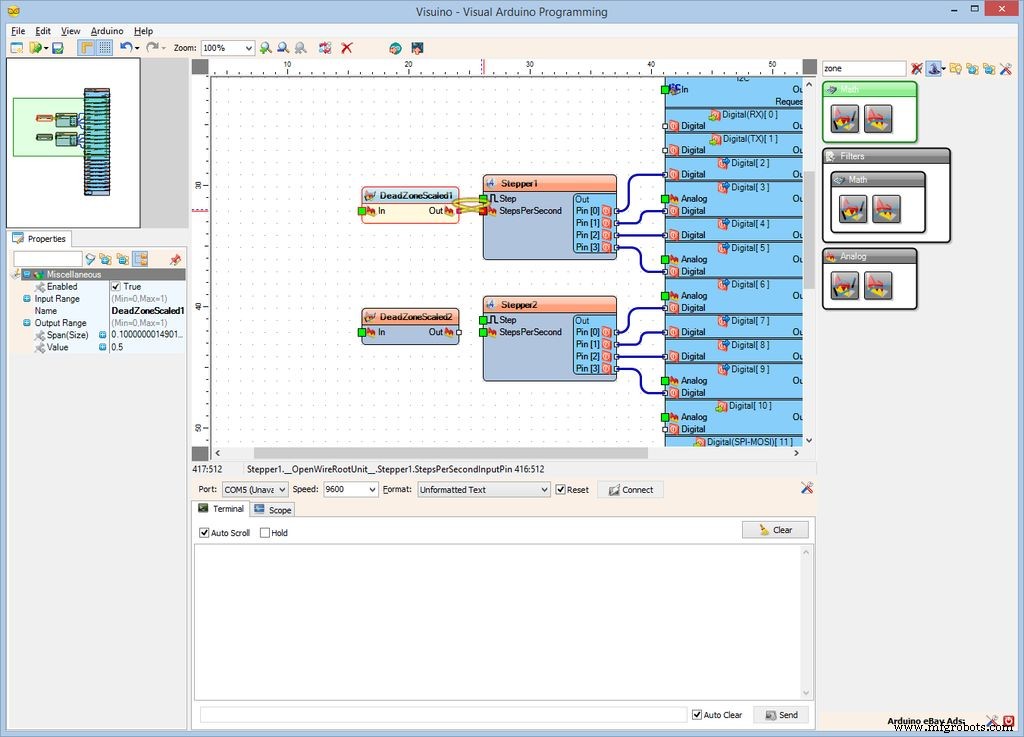
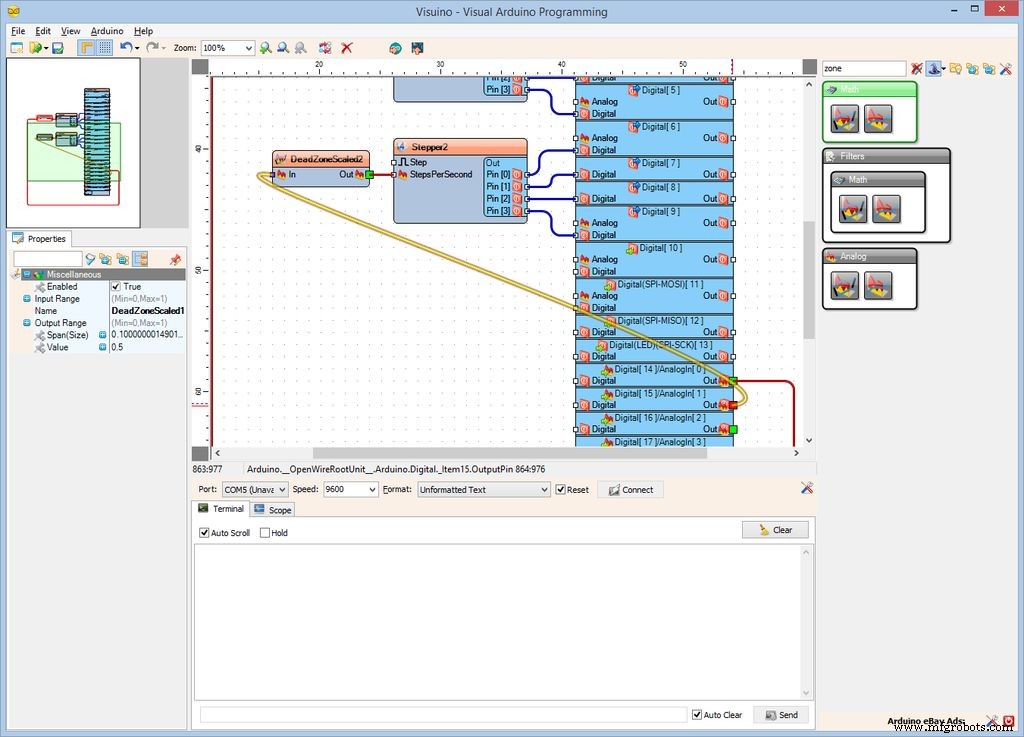
- Tapez "zone " dans la zone Filtre de la boîte à outils des composants, puis sélectionnez "Analogique à l'échelle de la zone morte composant " (Image 1 ), et supprimez deux d'entre eux dans la zone de conception
- Connectez le "Sortie " broche de sortie de la DeadZoneScaled1 composant au "StepsPerSecond " broche d'entrée du Stepper1 composant (Image 2 )
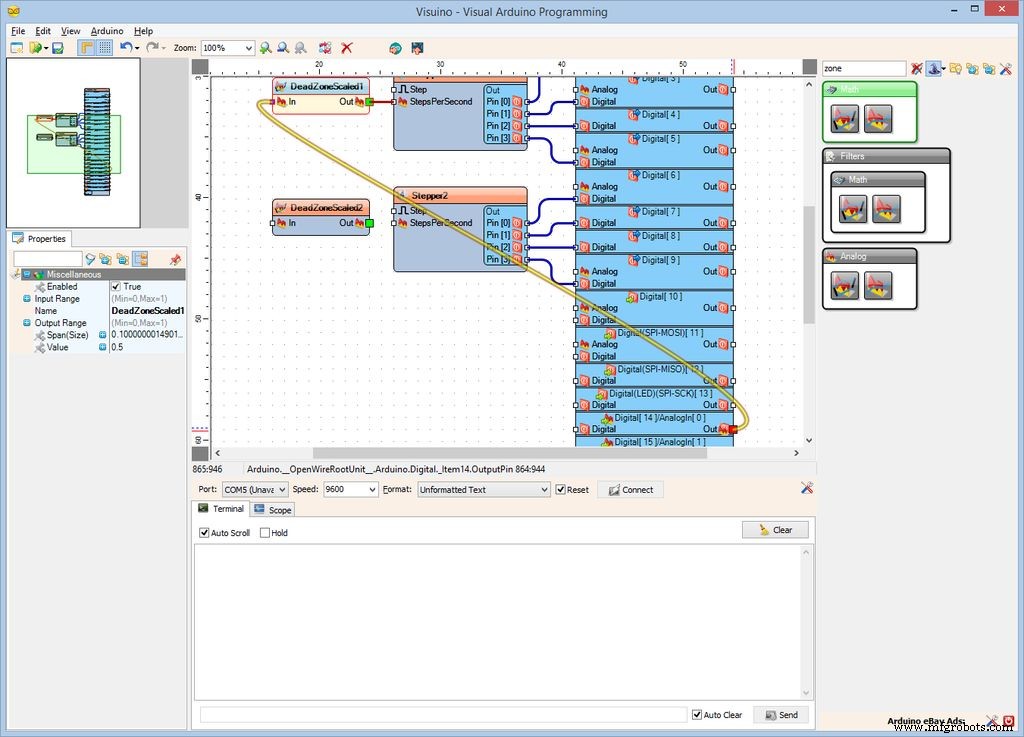
- Connectez le "Sortie " broche de sortie du "Digital[ 14 ]/Analog[ 0 ] " canal de l'Arduino composant au "In " broche d'entrée de la DeadZoneScaled1 composant (Image 3 )
- Connectez le "Sortie " broche de sortie du DeadZoneScaled2 composant au "StepsPerSecond " broche d'entrée du Stepper2 composant (Image 4 )
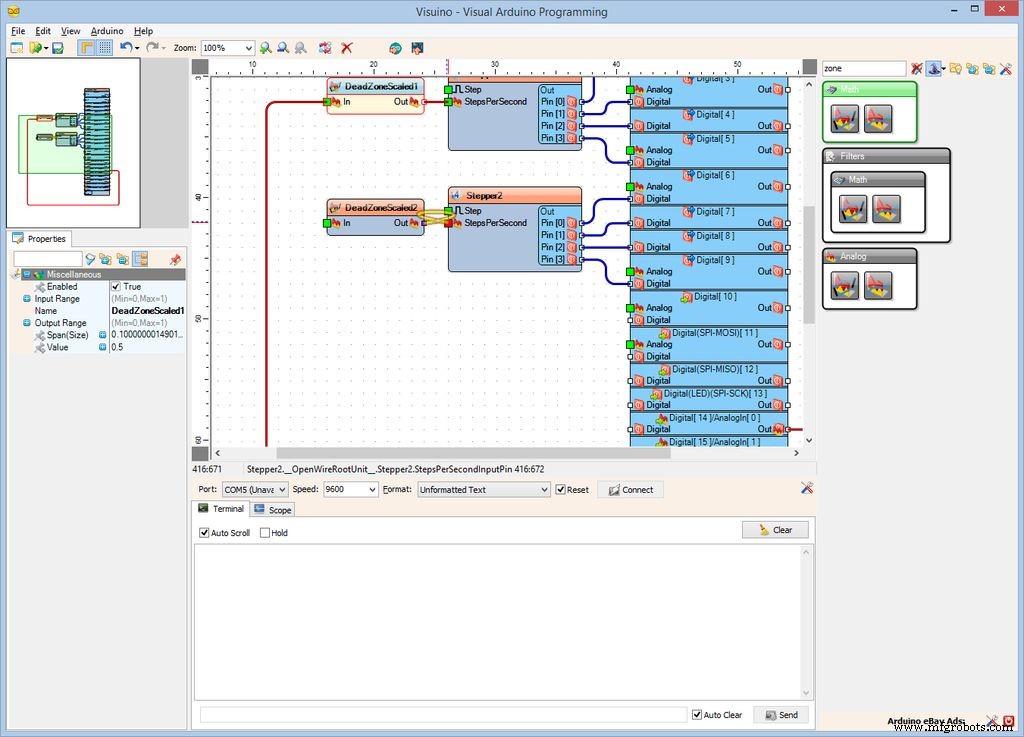
- Connectez le "Sortie " broche de sortie du "Digital[ 15 ]/Analog[ 1 ] " canal de l'Arduino composant au "In " broche d'entrée de la DeadZoneScaled2 composant (Image 5 )
Étape 9 :Dans Visuino :définissez les propriétés des composants analogiques à l'échelle de la zone morte
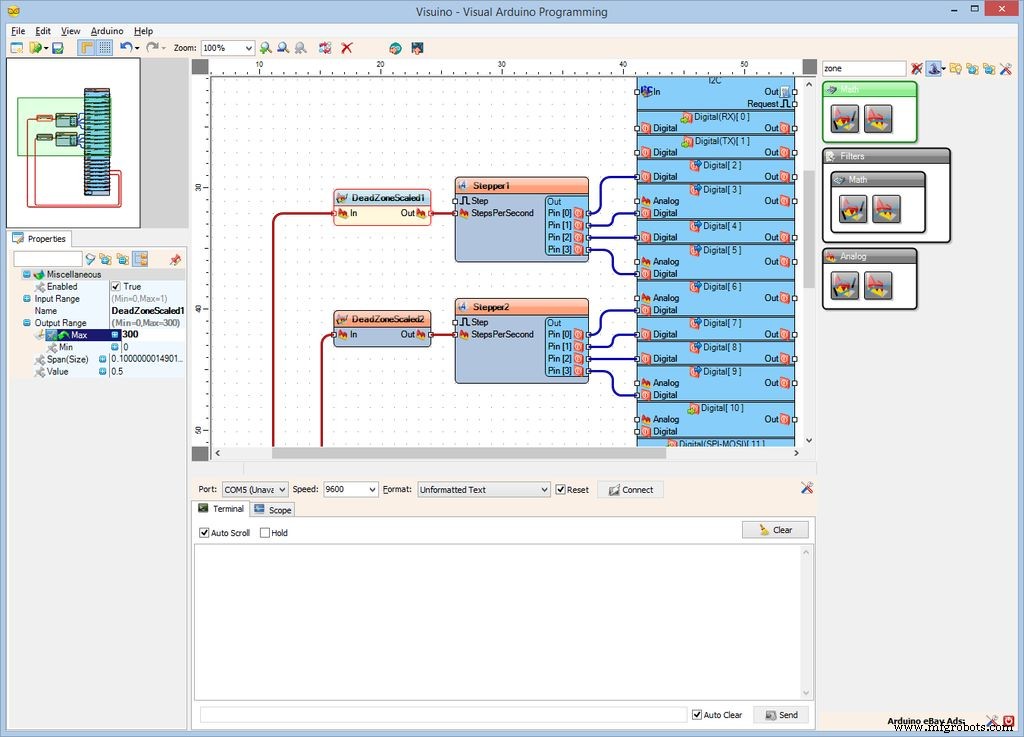
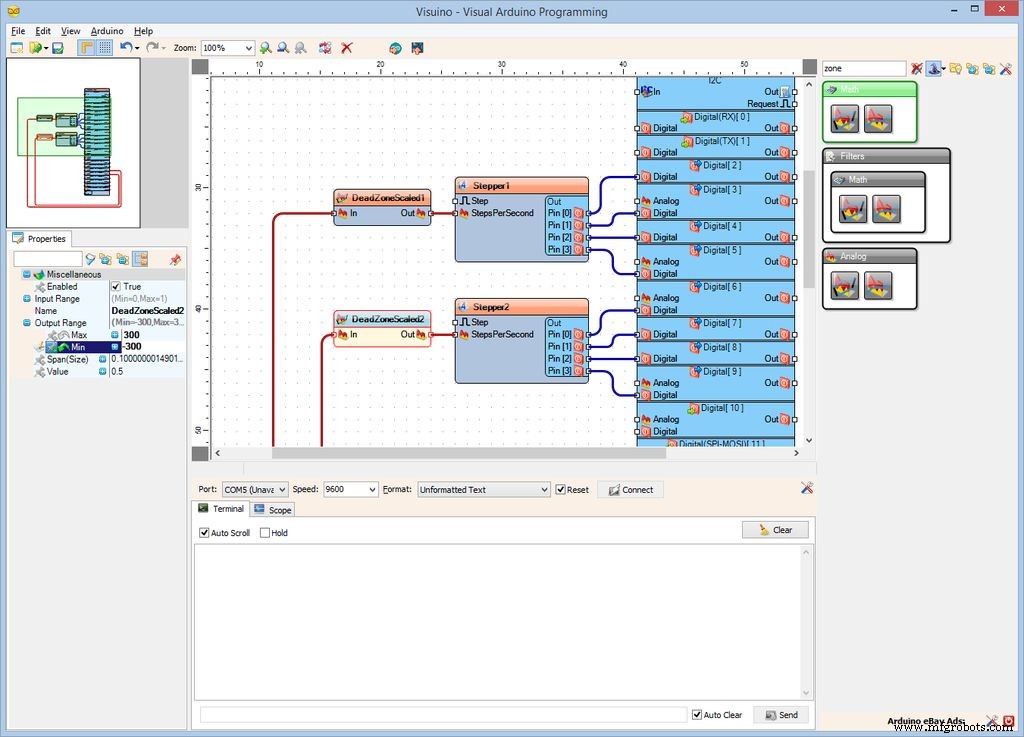
- Dans la zone de conception, sélectionnez la DeadZoneScaled1 composant (Image 1 )
- Dans l'inspecteur d'objets, développez la "Plage de sortie " propriété (Image 1 )
- Dans l'inspecteur d'objets, définissez la valeur de "Max " sous-propriété de la " Plage de sortie " propriété à "300 " (Image 1 )
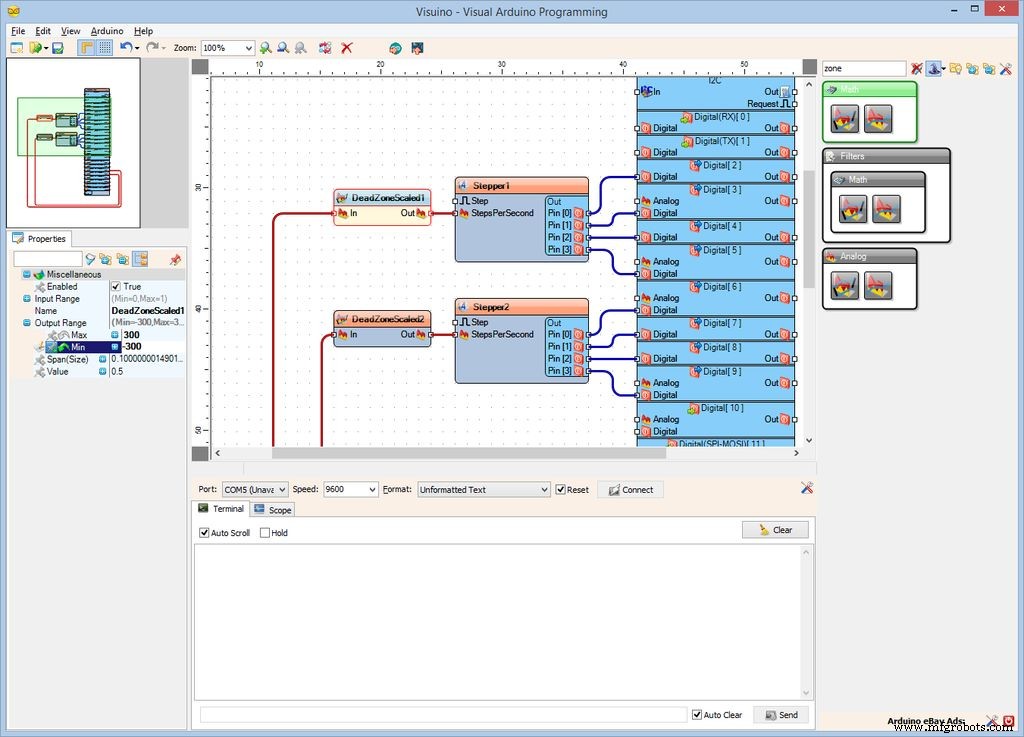
- Dans l'inspecteur d'objets, définissez la valeur de "Min " sous-propriété de la " Plage de sortie " propriété à "-300 " (Image 2 )
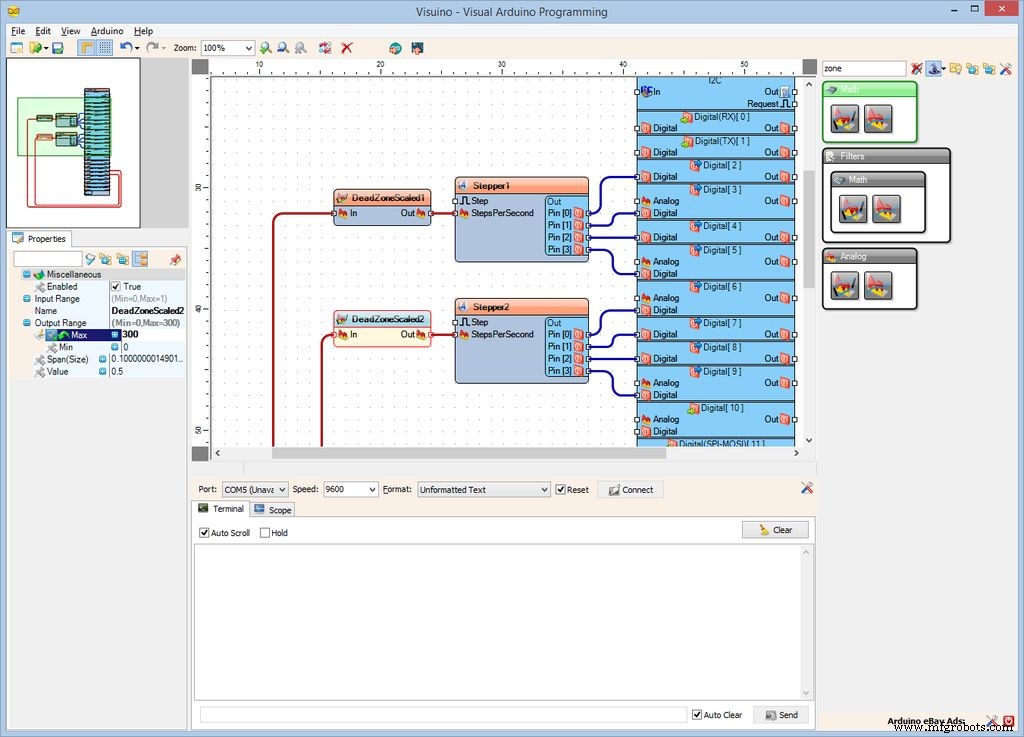
- Dans la zone de conception, sélectionnez la DeadZoneScaled2 composant (Image 3 )
- Dans l'inspecteur d'objets, développez la "Plage de sortie " propriété (Image 3 )
- Dans l'inspecteur d'objets, définissez la valeur de "Max " sous-propriété de la " Plage de sortie " propriété à "300 " (Image 3 )
- Dans l'inspecteur d'objets, définissez la valeur de "Min " sous-propriété de la " Plage de sortie " propriété à "-300 " (Image 4 )
Étape 10 :générer, compiler et télécharger le code Arduino
- En Visuino , Appuyez sur F9 ou cliquez sur le bouton affiché sur Image 1 pour générer le code Arduino et ouvrir l'IDE Arduino
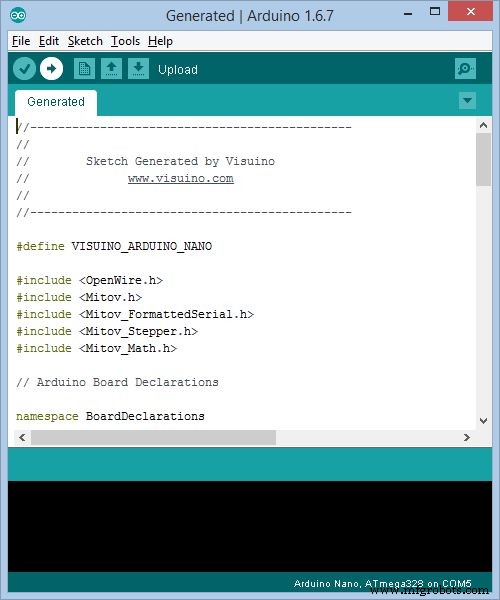
- Dans l'IDE Arduino , cliquez sur Télécharger bouton, pour compiler et télécharger le code (Image 2 )
Étape 11 :Et jouez...

Félicitations ! Vous avez terminé le projet.
Image 1 et la Vidéo afficher le projet connecté et sous tension.
Vous pouvez contrôler les pas à pas avec le Joystick comme on le voit dans la Vidéo . Déplacer le Joystick vers le haut et Bas contrôlera le Forward et En arrière rotation de l'un des pas à pas . Déplacer le joystick vers la gauche et Droit contrôlera l'autre Stepper .
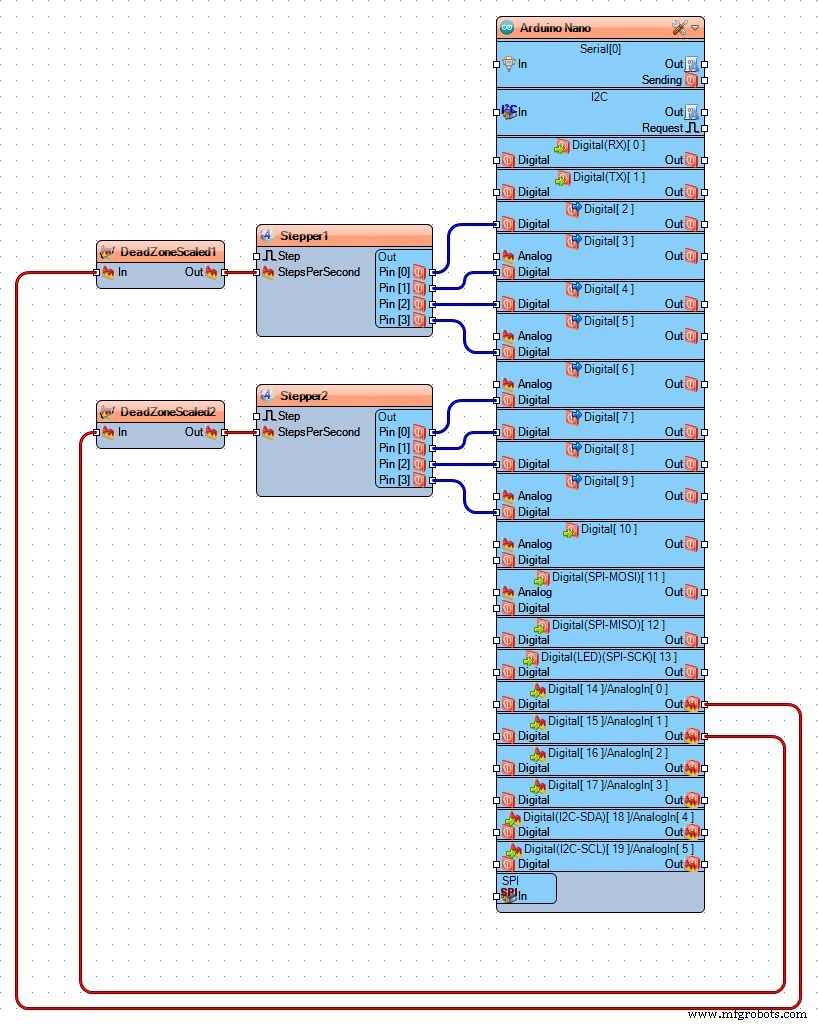
Sur Image 2 vous pouvez voir le Visuino complet schéma.
Le Visuino est également joint projet, que j'ai créé pour ce tutoriel. Vous pouvez le télécharger et l'ouvrir dans Visuino :https://www.visuino.com
FQM7EG7IPOA2W5T.zip
Processus de fabrication
- Contrôler l'accepteur de pièces avec Arduino
- Arduino avec Bluetooth pour contrôler une LED !
- Détermination de la santé des plantes avec TinyML
- Compteur Geiger portable avec Arduino Nano
- Dé à coudre - Contrôle de la souris avec vos doigts
- Joystick Arduino
- Contrôler un cafard avec Arduino pour moins de 30 $
- Contrôle de voiture avec Arduino Uno et Bluetooth
- Contrôle de ventilateur PWM 4 broches 25 kHz avec Arduino Uno