


bot de suivi humain
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Salut Guyzz...
Dans cette pandémie, j'espère que tout le monde est à la maison en sécurité.
J'ai créé un nouveau projet nommé Human Follow Bot.
regardez toute la vidéo pour réaliser ce projet chez vous.
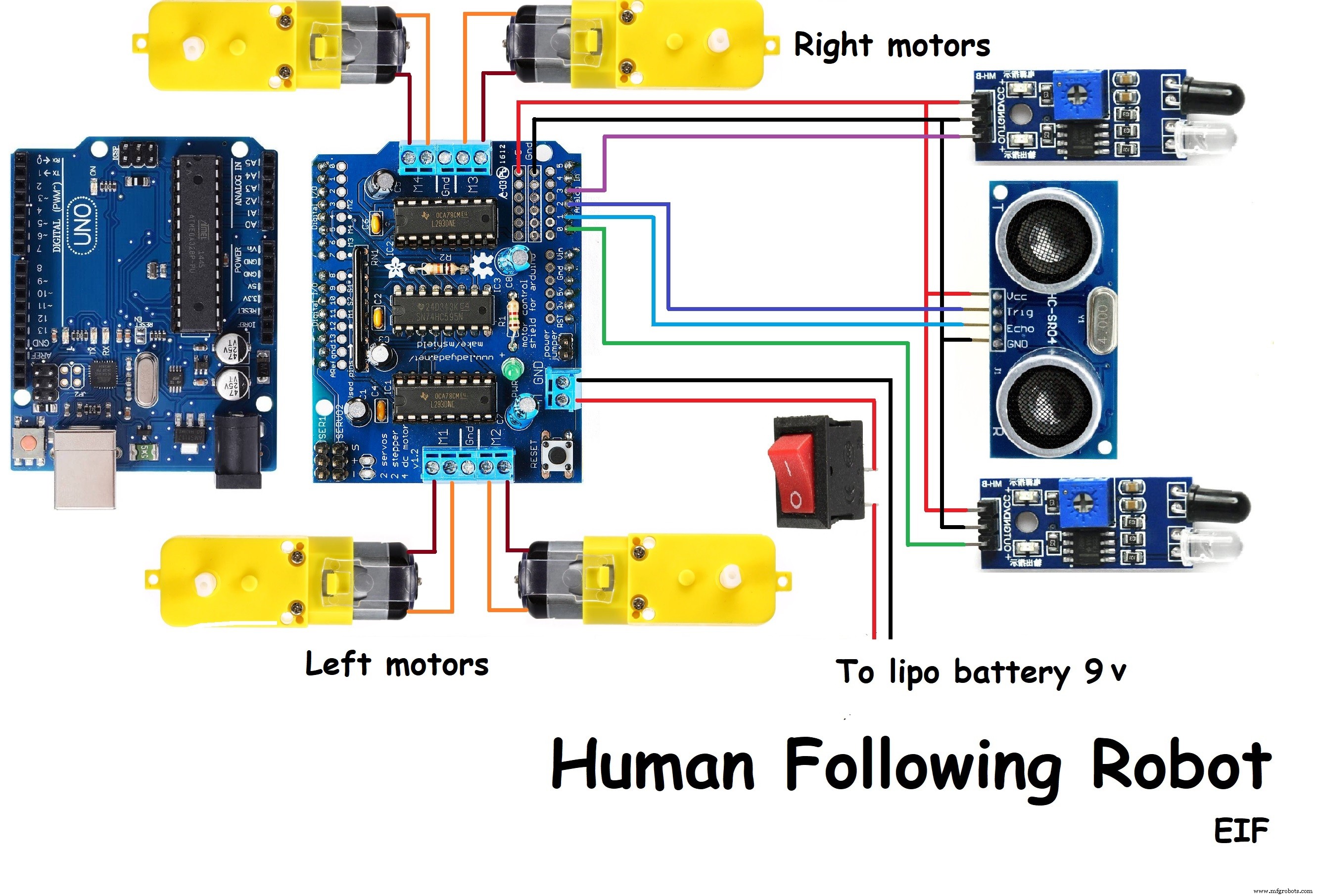
Il utilisait 2 capteurs IR et un capteur à ultrasons. Des capteurs IR sont utilisés pour suivre l'humain ou l'objet et un capteur à ultrasons est utilisé pour faire reculer le robot.
Si vous aimez ce projet respectez-le.
Donnez-moi des suggestions pour que je puisse l'améliorer ou tout commentaire que vous souhaitez donner à ma chaîne YouTube.
le lien est :https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Vous pouvez également me donner des suggestions sur "Qu'est-ce que j'ai fait le prochain projet. ?"
Étapespourfaireceprojet :
1. Rassemblez des composants tels qu'Arduino, des motoréducteurs à courant continu avec roues, 2 capteurs IR, un capteur à ultrasons, un servomoteur, du carton, un bouclier de pilote de moteur l293d, une batterie 9 v, un interrupteur, des câbles de raccordement, etc.
2. Prenez du carton et placez les 4 moteurs avec des roues dessus pour faire une voiture.
3. Placez des capteurs IR sur la voiture.
4. Collez le servomoteur sur la voiture.
5. Placez le capteur à ultrasons dans la boîte et ajoutez-y une poignée, puis connectez-le au servomoteur.
6. Connectez l'arduino et le blindage du moteur l293d sur la voiture.
7. Effectuez les connexions comme indiqué dans le schéma de circuit.
8. Téléchargez le code et connectez le commutateur avec la batterie au blindage du pilote de moteur l293d.
Réglez la sensibilité des capteurs IR.
Votre projet est prêt...!!!
Visitez ma chaîne YouTube une fois et découvrez des projets plus intéressants.
« L'électronique, c'est amusant »
Si vous aimez ma chaîne, abonnez-vous s'il vous plaît.
lien :https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Code
- Code
CodeArduino
// www.YouTube.com/Electronics is Fun //#include#include #define LEFT A0#define echopin A1 // echo pin#define trigpin A2 // Trigger pin #define DROIT A3AF_DCMotor Motor1(1,MOTOR12_1KHZ);AF_DCMotor Motor2(2,MOTOR12_1KHZ);AF_DCMotor Motor3(3,MOTOR34_1KHZ);AF_DCMotor Motor4(4,MOTOR34_1KHZ);Servo myservo; int pos =0;long time;void setup(){Serial.begin(9600);myservo.attach(10);for(pos =90; pos <=180; pos +=1){myservo.write(pos);delay(15);} for(pos =180; pos>=0; pos-=1) {myservo.write(pos);delay(15);}for(pos =0; pos<=90; pos + =1) {myservo.write(pos);delay(15);}pinMode(RIGHT, INPUT);pinMode(LEFT, INPUT);pinMode(trigpin, OUTPUT);pinMode(echopin, INPUT);}void loop() {unsigned int distance =read_cm();int Right_Value =digitalRead(RIGHT);int Left_Value =digitalRead(LEFT);Serial.print("R=");Serial.print(Right_Value);Serial.print(" L=" );Serial.print(Left_Value);Serial.print(" D=");Serial.println(distance); if((Right_Value==1) &&(distance>=10 &&distance<=30)&&(Left_Value==1)){forword();}else if((Right_Value==0) &&(Left_Value==1) ){turnRight();}else if((Right_Value==1) &&(Left_Value==0)){turnLeft();}else if((Right_Value==1) &&(Left_Value==1)){stop( );}else if(distance> 5 &&distance <10){stop();}else if(distance <5){backword();}delay(50);}long read_cm(){ digitalWrite(trigpin, LOW); délaiMicrosecondes(2) ; digitalWrite(triggin, HAUT); délaiMicrosecondes(10) ; temps =pulseIn (échopin, HAUT); temps de retour / 29 / 2;}void forword(){// l'activer en avantMotor1.setSpeed(120);Motor1.run(FORWARD);Motor2.setSpeed(120);Motor2.run(FORWARD);Motor3.setSpeed (120);Motor3.run(FORWARD);Motor4.setSpeed(120);Motor4.run(FORWARD);}void backword(){ // dans l'autre sensMotor1.setSpeed(120);Motor1.run(BACKWARD); Motor2.setSpeed(120);Motor2.run(BACKWARD);Motor3.setSpeed(120);Motor3.run(BACKWARD); Motor4.setSpeed(120);Motor4.run(BACKWARD); }void turnRight(){ // l'autre rightMotor1.setSpeed(200);Motor1.run(FORWARD);Motor2.setSpeed(200);Motor2.run(FORWARD);Motor3.setSpeed(100);Motor3.run(BACKWARD );Motor4.setSpeed(100);Motor4.run(BACKWARD);}void turnLeft(){ // l'allumer en allant à gaucheMotor1.setSpeed(100);Motor1.run(BACKWARD);Motor2.setSpeed(100);Motor2 .run(BACKWARD);Motor3.setSpeed(200);Motor3.run(FORWARD);Motor4.setSpeed(200);Motor4.run(FORWARD);}void stop(){ // stopMotor1.setSpeed(0); Motor1.run(RELEASE);Motor2.setSpeed(0);Motor2.run(RELEASE);Motor3.setSpeed(0);Motor3.run(RELEASE);Motor4.setSpeed(0);Motor4.run(RELEASE); }
Schémas
Processus de fabrication