Pédale de vitesse et pédale pour guitare !
Composants et fournitures
 | | Texas Instruments Dual H-Bridge Motor Drivers L293D |
| × | 1 | |
 | | × | 1 | |
| | Moteur à courant continu (générique) |
| × | 1 | |
 | | × | 1 | |
 | | Potentiomètre rotatif (générique) |
| × | 1 | |
 | | Planche à pain (générique) |
| × | 1 | |
 | | Câbles de raccordement (générique) |
| × | 1 | |
Applications et services en ligne
À propos de ce projet
Créez votre propre choix de vitesse et revenez à la maison avec ce projet simple imprimé en 3D et Arduino !
Créer et assembler
Logiciel - Conception du modèle :Autodesk Fusion 360 https://www.autodesk.com/products/fusion-360/overview
- Logiciel de trancheuse d'impression 3D :Simplify3D https://www.simplify3d.com
- Logiciel de codage :Arduino IDE https://www.arduino.cc/en/Main/Software
Imprimante 3D utilisée
Téléchargements - Profil Simplify3D FFF :https://drive.google.com/open?id=1an5pNq8Q5vVltrBfKb08eP2k33RQ4BWq
- Pièces du modèle 3D :https://www.thingverse.com/thing:3058807
Composants
- 1 x pilote de moteur L293D
- 1 moteur 6 V CC – couple moyen
- 1 x bouton de rotation du potentiomètre
- 1 x bouton poussoir (pas de mécanisme de verrouillage)
- 1 x petits fils de planche à pain
- 1 x adaptateur secteur à tension réglable
Code
- Code Arduino pour contrôler la vitesse du moteur via la pédale
Code Arduino pour contrôler la vitesse du moteur via la pédaleArduino
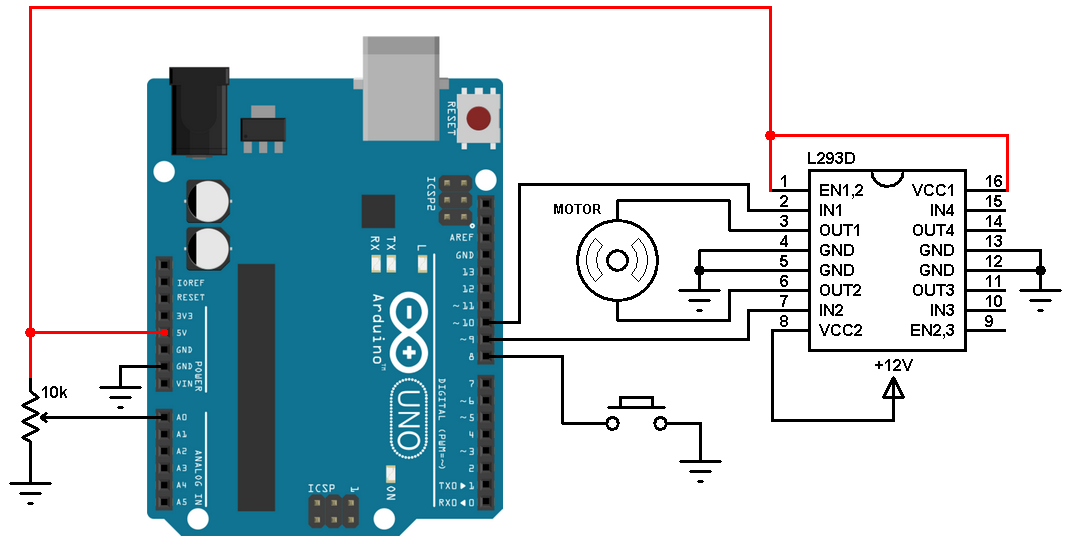
#define PIN_Pot A0#define PIN_LED 9#define PIN_Input1 2 //L293D broche 2#define PIN_Input2 7 //L293D broche 7#define PIN_Speed 3 //L293D broche 1int sensorValue =0;void setup(){ pinMode(PIN_Speed , SORTIR); pinMode(PIN_LED, SORTIE); pinMode(PIN_Input1, OUTPUT); pinMode(PIN_Input2, OUTPUT);}boucle vide(){ sensorValue =analogRead(PIN_Pot)/4 ; analogWrite(PIN_LED, map(sensorValue, 0, 255, 10, 255)); analogWrite(PIN_Speed, map(sensorValue, 0, 255, 50, 220)); //Définition de la direction du moteur à courant continu digitalWrite(PIN_Input1, LOW); digitalWrite(PIN_Input2, HIGH);} Schémas
Des schémas plus mis à jour seront bientôt téléchargés.