


Contrôle du servomoteur avec Arduino et MPU6050
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Composants
- Arduino UNO
- MPU6050
- Servomoteur MG 996R
- Cavaliers
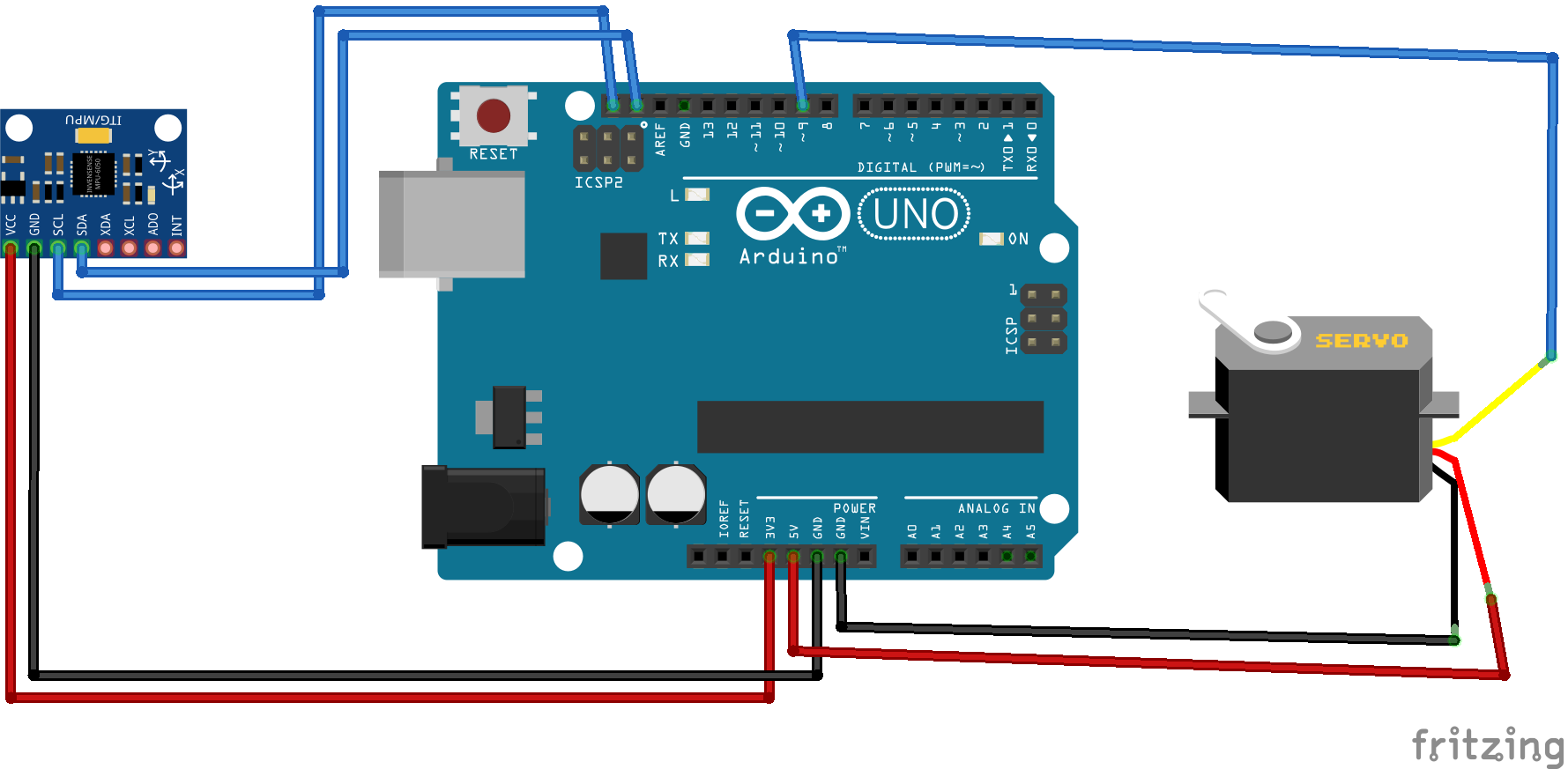
Connexions
Vérifiez le schéma joint pour les connexions
Remarque :Vous pouvez également connecter les broches SDA et SCL du MPU6050 aux broches A4 et A5 d'Arduino respectivement.
Programmation
Incluez la bibliothèque jointe dans votre IDE Arduino, puis téléchargez le code dans votre carte Arduino.
Remarque
Regardez la vidéo pour une compréhension complète et abonnez-vous à notre chaîne pour en savoir plus.
Merci.
Code
- Bibliothèque MPU6050
- Code pour le projet
Bibliothèque MPU6050C/C++
Aucun aperçu (téléchargement uniquement).
Code pour le projetC/C++
//hammadiqbal12@gmail.com//https://www.youtube.com/watch?v=Cvtr3LKdqvk#include//bibliothèque pour GYRO #include #include Servo monservo; // crée un objet servo pour contrôler un servoint X =0;int Y =0;GY6050 gyro(0x68); //pour enregistrer GYRO datavoid setup() { Wire.begin(); //initialisation de GYRO gyro.initialisation(); retard (100); myservo.attach(9);}boucle vide() { X =map(gyro.refresh('A', 'X'), -90, 90, 0, 180); // mappage des données du gyroscope en fonction de la limitation d'angle du servomoteur Y =map(gyro.refresh('A', 'Y'), -90, 90, 0, 180); monservo.write(Y); //le mouvement de l'axe Y contrôlera le délai d'asservissement (15) ;}
Schémas
Processus de fabrication
- Contrôler un effet avec de vrais capteurs
- Système de présence utilisant Arduino et RFID avec Python
- Capteur DHT11 avec LED et haut-parleur piézo
- Arduino Temp. Moniteur et horloge en temps réel avec affichage 3.2
- Obstacles pour éviter le robot avec servomoteur
- Contrôler un robot Roomba avec Arduino et un appareil Android
- Contrôle de la luminosité des LED à l'aide de Bolt et Arduino
- module GPS u-blox LEA-6H 02 avec Arduino et Python
- Qu'est-ce qu'un servomoteur ?