


Mangeoire télécommandée pour animaux de compagnie
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Outils et machines nécessaires
| ||||
 |
|
Applications et services en ligne
 |
|
À propos de ce projet
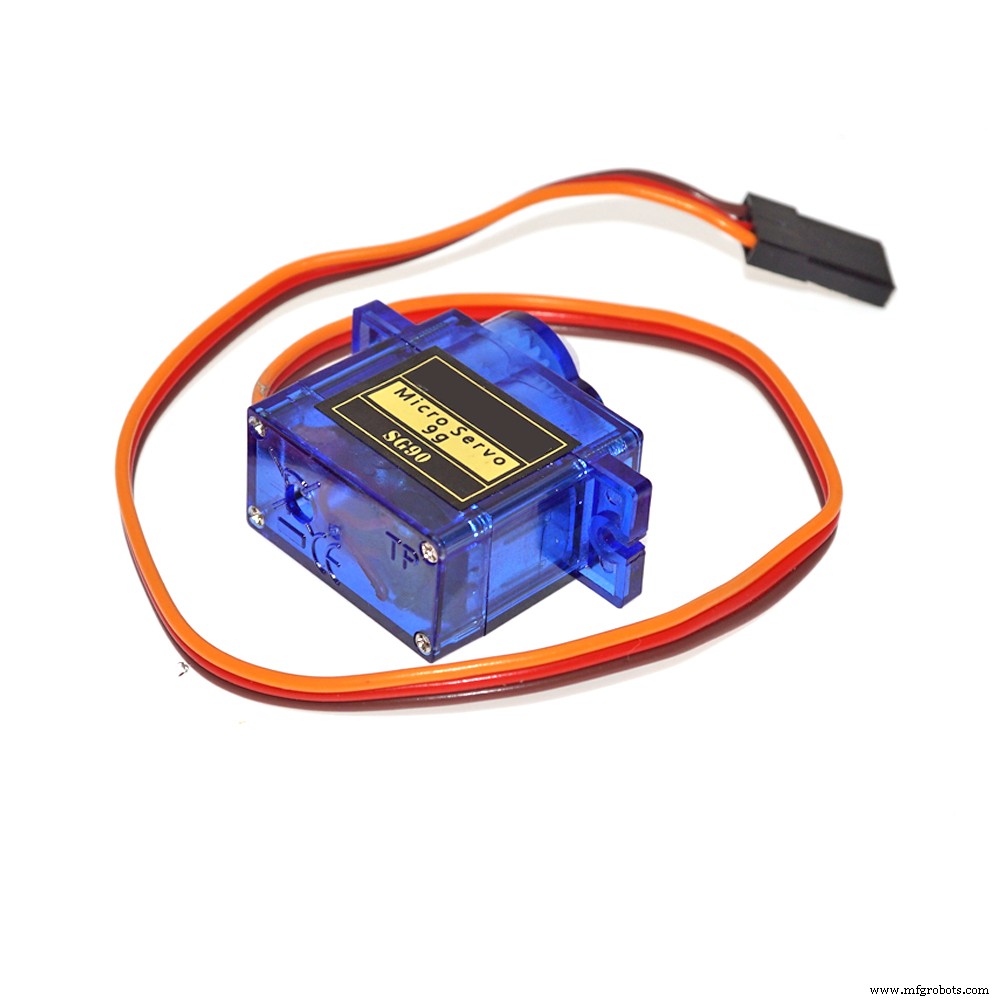
Avec ce projet Arduino simple, vous pouvez nourrir votre animal de compagnie à l'aide d'une télécommande. Tout ce dont vous avez besoin est une carte Arduino Uno (ou similaire), une bouteille en plastique, un servomoteur (n'a pas besoin d'être très puissant), une télécommande TV, un récepteur IR (TS0P1738) et un petit morceau de carton.
Commençons !
Installation de la bibliothèque infrarouge :
La toute première chose que nous devons faire pour nous associer à Arduino est de télécharger la bibliothèque IR.
Téléchargez la bibliothèque IR à partir du lien ci-dessous et installez-la :https://github.com/z3t0/Arduino-IRremote
Si vous ne savez pas comment installer une bibliothèque, suivez le lien ci-dessous :https://www.arduino.cc/en/guide/libraries
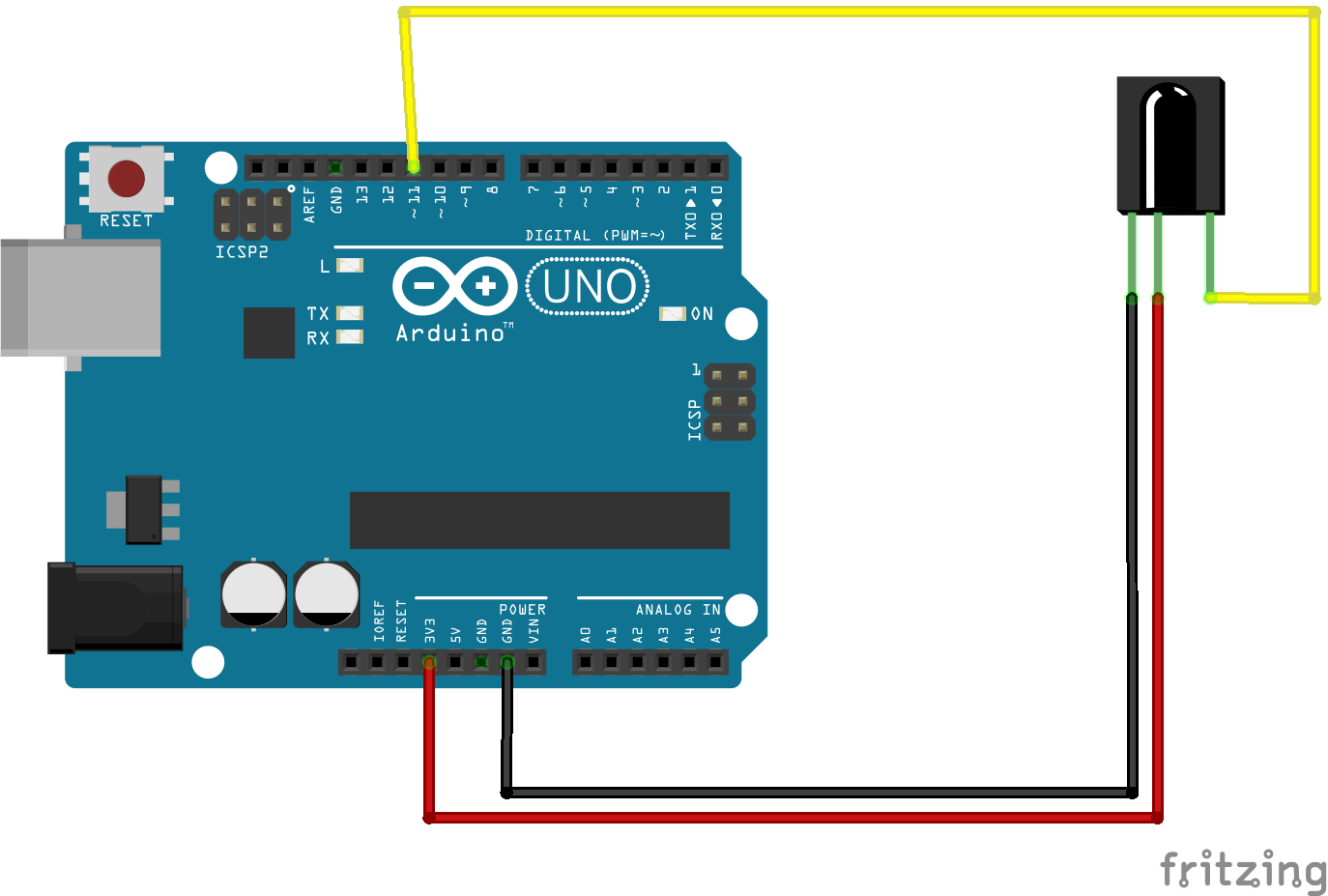
Décodage des signaux IR :
Vous devez d'abord connecter les pièces selon le schéma de circuit donné :
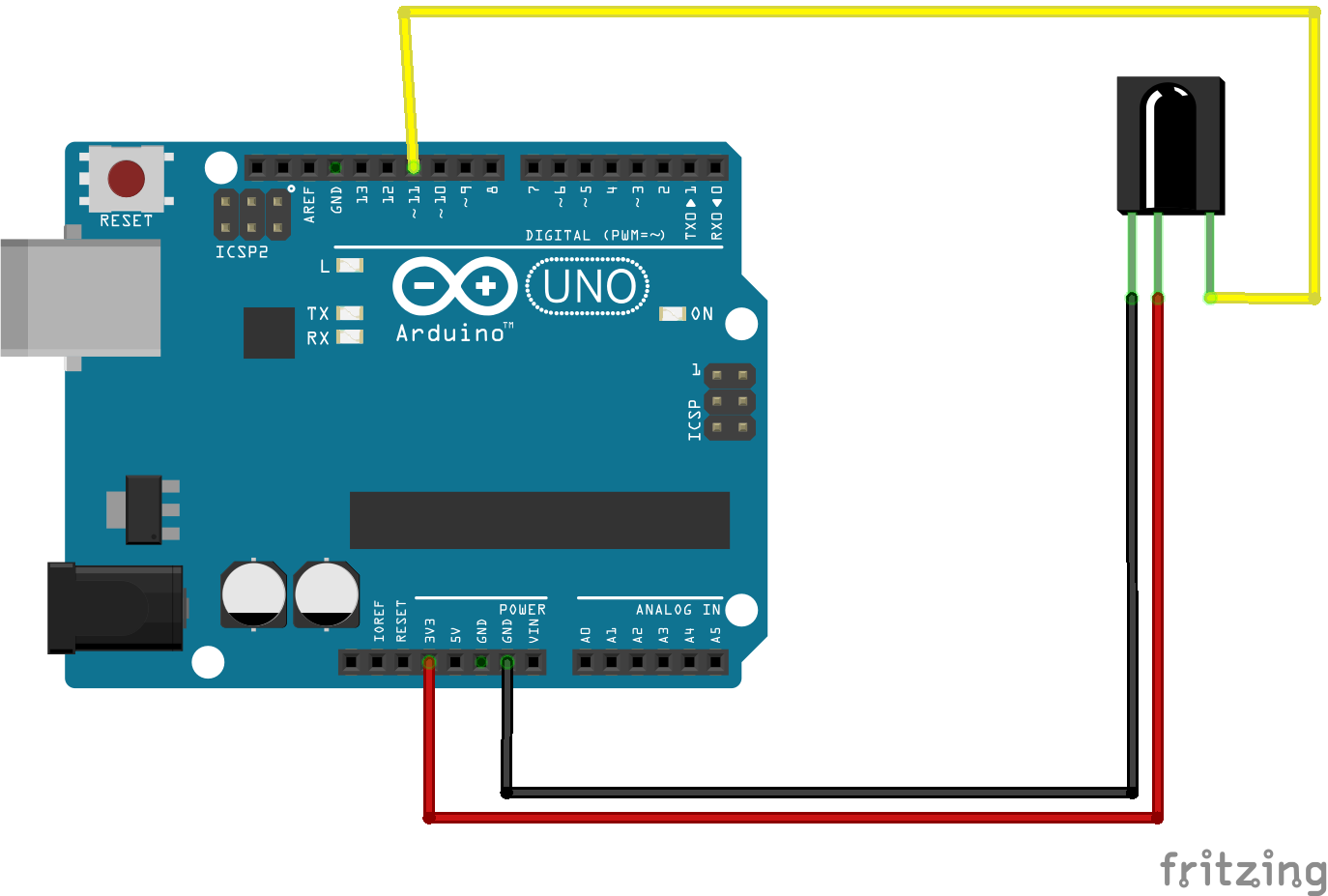
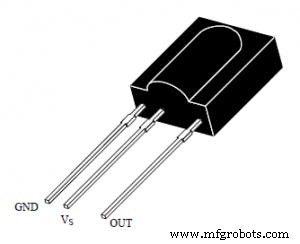
Vous pouvez extraire l'épingle de TSOP1738 ci-dessous :
Utilisez le code suivant pour décoder la télécommande IR :
/*Les broches du capteur IR sont attachées à Arduino ainsi : Broche 1 à Vout (broche 11 sur Arduino)Broche 2 à GNDPin 3 à Vcc (+5v d'Arduino)*/#include int IRpin =11;IRrecv irrecv(IRpin);résultats decode_results;void setup(){ Serial.begin(9600); irrecv.enableIRIn(); // Lancer le récepteur}void loop() { if (irrecv.decode(&results)) { Serial.println(results.value, DEC); // Affiche le Serial 'results.value' irrecv.resume(); // Recevoir la valeur suivante }} - Ouvrez l'IDE Arduino et téléchargez le code
- Ouvrir le moniteur série
- Dirigez votre télécommande vers le capteur et appuyez sur chaque bouton
- Vous pouvez voir des numéros différents pour chaque bouton
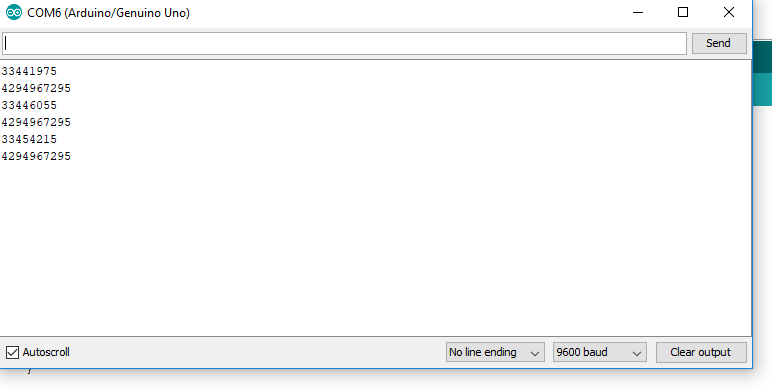
Considérez deux boutons quelconques et notez les valeurs décodées. Dans mon cas, j'ai choisi le bouton d'alimentation et le bouton de mode.
J'ai les valeurs suivantes :
- Bouton d'alimentation=33441975
- Bouton Mode =33446055
Nous utiliserons ces deux valeurs pour contrôler la rotation du servomoteur. Vous devez ajouter ces deux valeurs dans le programme qui est donné à l'étape suivante :

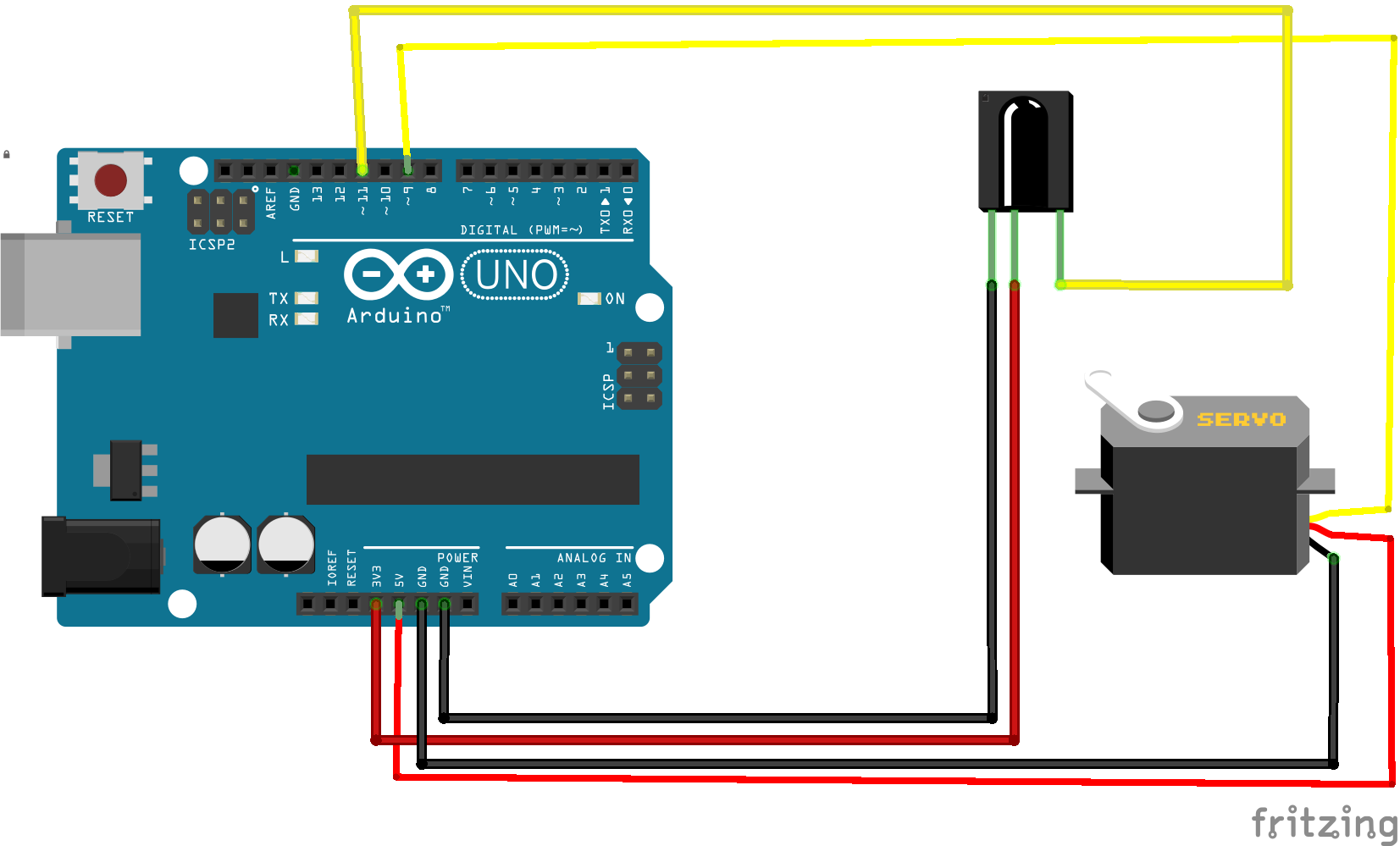
Configurons le matériel final !
Le circuit final !
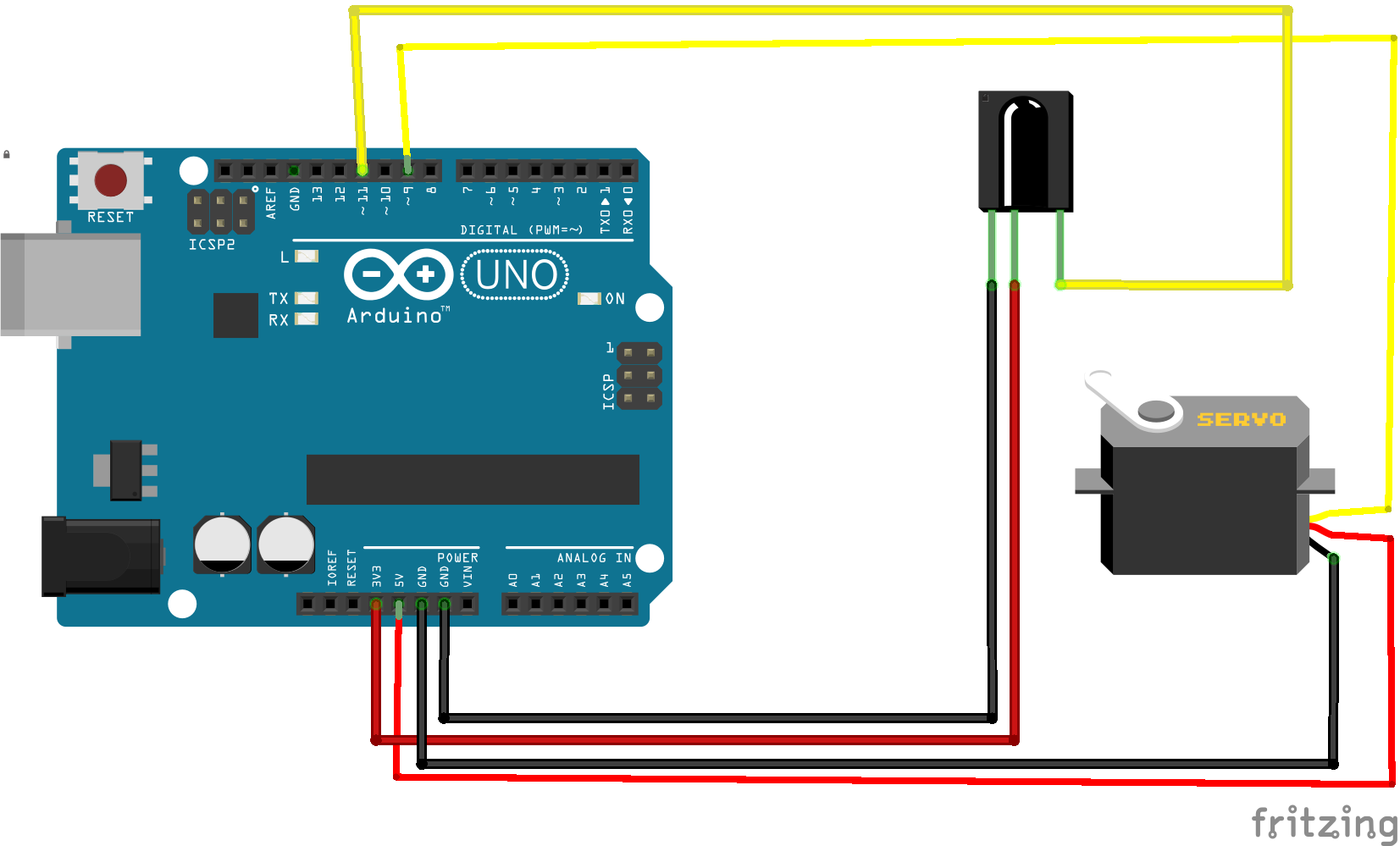
- Connectez la broche de signal du servo à la broche n°9 de l'arduino
- connectez les broches VCC et GND du servo à 5V VCC et GND sur l'arduino
- Le servo sera collé à une extrémité de la bouteille en plastique et fera pivoter un morceau de carton suffisamment petit pour fermer l'ouverture de la bouteille afin que la nourriture soit bloquée.
- Si toute la configuration matérielle est correctement connectée, vous pouvez simplement compiler et télécharger le croquis suivant sur la carte.
#include #include int IRpin =11 ; // broche pour le capteur IRIRrecv irrecv(IRpin);decode_results results;Servo myservo;void setup(){ Serial.begin(9600); irrecv.enableIRIn(); // Démarre le récepteur myservo.attach(9) ; // attache le servo sur la broche 9 à l'objet servo}boucle vide() { if (irrecv.decode(&results)) { irrecv.resume(); // Recevez la valeur suivante } if (results.value ==33441975) // changez en fonction du numéro de votre bouton de télécommande IR { myservo.write(0); retard (15); } if (results.value ==33446055) // change en fonction du numéro de bouton de votre télécommande IR { myservo.write(30); retard (15); }} Vous pouvez maintenant contrôler l'ouverture de votre distributeur de mangeoires pour animaux de compagnie avec télécommande grâce à ce projet simple. :-)
Bonne fabrication !
Code
- Decode_IR
- IRremote_Servo_Control
Decode_IRArduino
Utilisez ce code pour décoder la télécommande IR/* Les broches du capteur IR sont attachées à Arduino ainsi : Broche 1 à Vout (broche 11 sur Arduino) Broche 2 à GND Broche 3 à Vcc (+5v d'Arduino)*/# inclureint IRpin =11;IRrecv irrecv(IRpin);decode_results results;void setup(){ Serial.begin(9600); irrecv.enableIRIn(); // Lancer le récepteur}void loop() { if (irrecv.decode(&results)) { Serial.println(results.value, DEC); // Affiche le Serial 'results.value' irrecv.resume(); // Recevoir la valeur suivante } }
IRremote_Servo_ControlArduino
Ajoutez la valeur décodée de votre télécommande dans ce code#include#include int IRpin =11; // broche pour le capteur IRIRrecv irrecv(IRpin);decode_results results;Servo myservo;void setup(){ Serial.begin(9600); irrecv.enableIRIn(); // Démarre le récepteur myservo.attach(9) ; // attache le servo sur la broche 9 à l'objet servo } void loop() { if (irrecv.decode(&results)) { irrecv.resume(); // Recevez la valeur suivante } if (results.value ==33441975) // changez en fonction du numéro de votre bouton de télécommande IR { myservo.write(0); retard (15); } if (results.value ==33446055) // change en fonction du numéro de bouton de votre télécommande IR { myservo.write(30); retard (15); } }
Schémas
Processus de fabrication
- Ventilateur à température contrôlée
- Aquaponie contrôlée Raspberry Pi
- Surveillance à distance de la météo à l'aide de Raspberry Pi
- Télécommande universelle Raspberry Pi
- Bouton AWS IoT à contrôle de mouvement
- Moniteur de fréquence cardiaque à distance
- Interrupteur d'alimentation AC contrôlé par SMS Raspberry Pi/Hologram
- Robot contrôlé par Wi-Fi utilisant Raspberry Pi
- ROObockey :robot de hockey de rue télécommandé et assisté