


Compteur RPM basé sur Arduino avec un nouvel algorithme plus rapide
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Outils et machines nécessaires
 |
| |||
 |
|
Applications et services en ligne
 |
|
À propos de ce projet
Ce projet est développé à partir de grattage comme une tentative de mesurer le RPM exact (Rotations par Minute)valeur de divers moteurs utilisant un seul IR capteur, une carte Arduino et un essentiel ingrédient clé -un pointeur laser (nécessairement rouge).
Ce projet utilise le fait que le capteur IR lit également le faible nombre de rayonnements IR émis par le laser rouge. Cependant, lorsqu'un laser bleu/vert est utilisé, ces rayonnements IR diminuent et la tension de lecture analogique chute à env. 0.
Lorsqu'une pale du ventilateur fixée au moteur entre dans le trajet du faisceau laser, elle bloque le chemin et la lecture tombe à 0. La pale du ventilateur continue de tourner et sa position continue de changer avec une alimentation constante. Un changement constant de chemin se produit. Lorsque le chemin redevient clair, le faisceau du pointeur laser frappe à nouveau le capteur.
NOUVEAU CODE BASÉ SUR UN ALGORITHME SINGLE SHOT, POUR DES MESURES ADAPTATIVES DE CHANGEMENT PLUS RAPIDES ET BEAUCOUP PLUS :-
Le code de ce projet que j'ai développé utilise un algorithme nouvellement développé pour ce projet. Le l'algorithme est en effet unique et est conçu pour effectuer des mesures en moins de 40 millisecondes et fournir des résultats précis. Une caractéristique très importante de ce programme est qu'il utilise une méthode que j'appelle Single Shot Detection for Arduino. Il calcule le régime du moteur à chaque fois que la pale du ventilateur crée une obstruction dans le trajet du faisceau laser. En effet, l'obstruction du trajet du faisceau laser marque un tour complet de 1/n pour n nombre de pales dans le ventilateur. Alors, le programme est très sensible à changements d'une minute même dans le RPM ( jusqu'à 2 décimales) dans chaque 1/n le révolution de le fan lame encore où n est le numéro de lames de le fan. Par conséquent, cet algorithme unique de détection de tir unique offre une précision extrême valeur de RPM et sensibilité plus élevée aux changements de mesures.
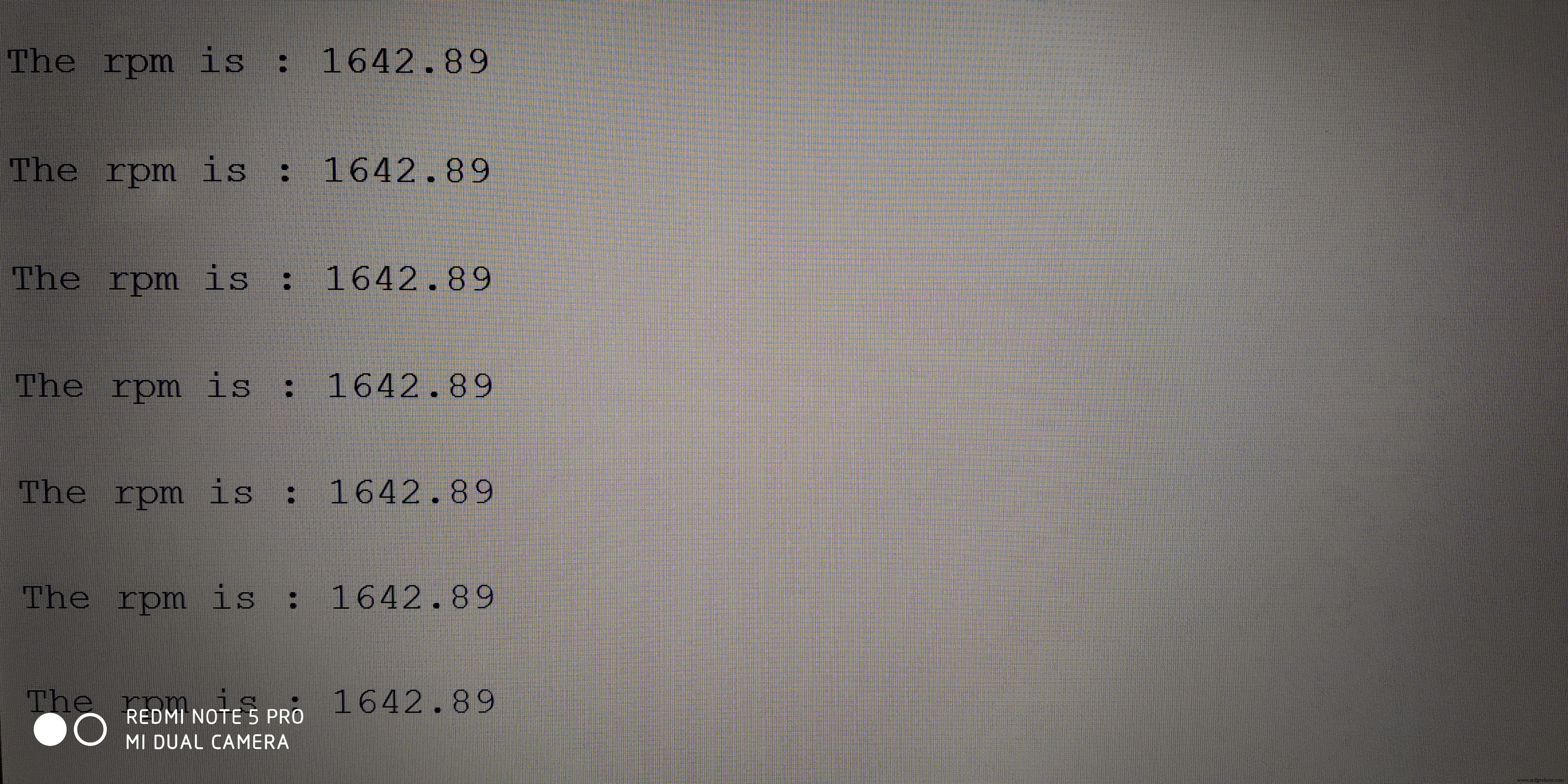
Dans le ci-dessus affiché image de un sortie échantillon de le série surveiller dans un tester exécuter, le taux de sortie dépistage peut clairement être vu qui est à propos 2 fois un seconde. Le RPM valeurs sont calculé jusqu'à deux lieux de décimales chacun temps.
Tout le monde qui regarde cela doit essayer ce projet une fois et partager vos précieuses critiques. Parlez de vos expériences et de leurs résultats liés à cet algorithme. Les suggestions de nouveaux projets sont les bienvenues dans la section commentaires. Si vous aimez le projet, respectez-le.
Suivez mon profil en appuyant sur ce lien (https://create.arduino.cc/projecthub/YASH36) @YASH36 pour quelques nouvelles mises à jour du projet.
D'ici là, restez en sécurité et profitez d'Arduino !!
Code
- RPM_counter_101
RPM_counter_101Arduino
C'est le code du compteur RPM.//code by YaSh.int sen =A0;const float wid =0.012; // ajustez la largeur de la pale du ventilateur en fonction de vos besoins.const float rad =0.045; // ajuste le rayon du point de détection dans la pale du ventilateur.const float konst =6.2832; // 2*pi.float time_1;float time_2;float vel;float diff;float tnet;float rpm;void setup() { Serial.begin(9600); pinMode(sen,ENTRÉE); Serial.print(" \n veuillez démarrer le moteur au moins 3 secondes avant.\n"); delay(3000);}void loop(){ if(analogRead(sen)<950) { time_1 =millis(); retard(30); } if(analogRead(sen)>950) { time_2 =millis(); diff =(heure_2-heure_1); vel =largeur/diff; //vitesse de rotation tnet =(konst*rad)/vel; //temps =(2*pi*rayon)/vitesse. tr/min =(60000)/tnet ; // temps en ms en minutes puis en pas de conversion rpm. }Serial.print("\n Le rpm est :"); Serial.println( rpm );} Schémas
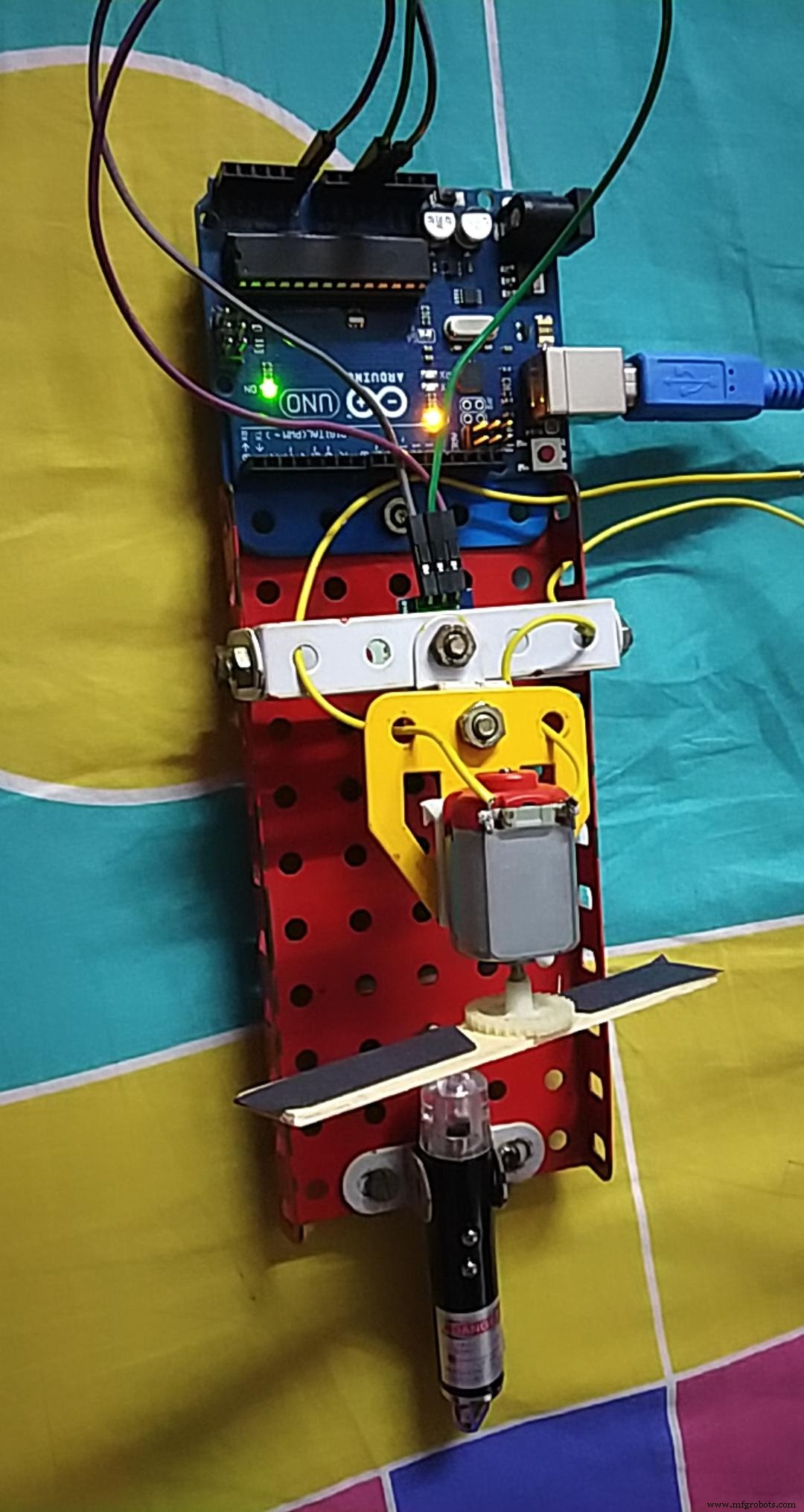
c'est l'image pour le placement de la base et des autres composants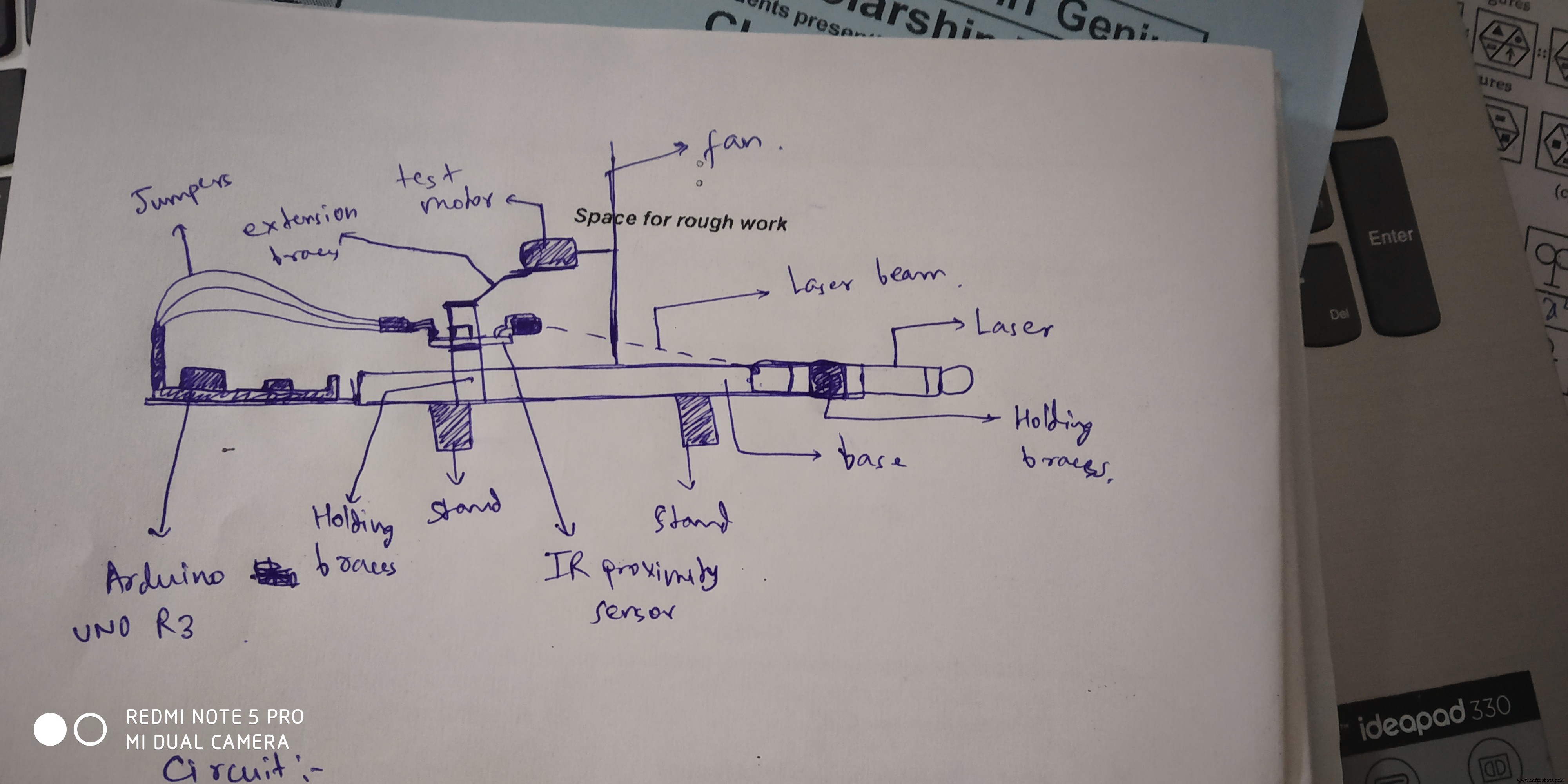 schéma pour connecter le capteur à la carte arduino
schéma pour connecter le capteur à la carte arduino 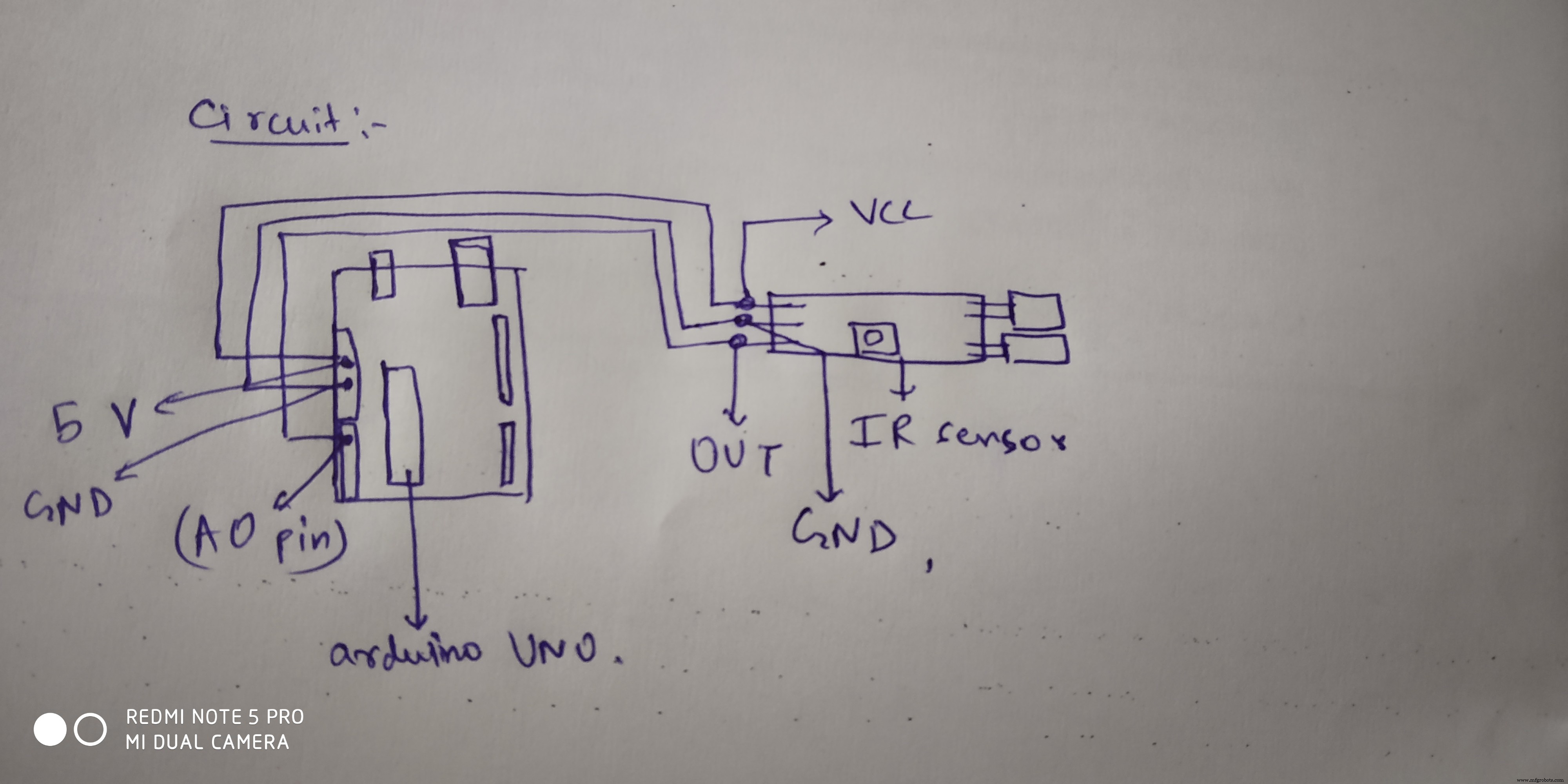
Processus de fabrication
- Aéroponie avec Raspberry Pi et capteur d'humidité
- Capteur Portenta et thermocouple (avec MAX6675)
- Jeu de gyroscope Arduino avec MPU-6050
- Capteur DHT11 avec LED et haut-parleur piézo
- Surveillance du CO2 avec le capteur K30
- Unopad - Contrôleur MIDI Arduino avec Ableton
- Enregistreur de données de température et d'humidité
- IOT - Smart Jar utilisant ESP8266, Arduino et capteur à ultrasons
- Automates cellulaires basés sur Arduino et OLED