


Moteur pas-à-pas vs moteur DC - En quoi sont-ils différents
Les moteurs électriques sont des composants essentiels dans la conversion de l'énergie électrique en énergie mécanique. Cependant, alors que tous les moteurs remplissent la même fonction, choisir le bon est pratique pour fournir un couple maximal. Ainsi, dans cet article, nous ferons la distinction entre le moteur pas à pas et le moteur à courant continu. Nous identifierons également les propriétés critiques des servomoteurs.
Moteur pas à pas
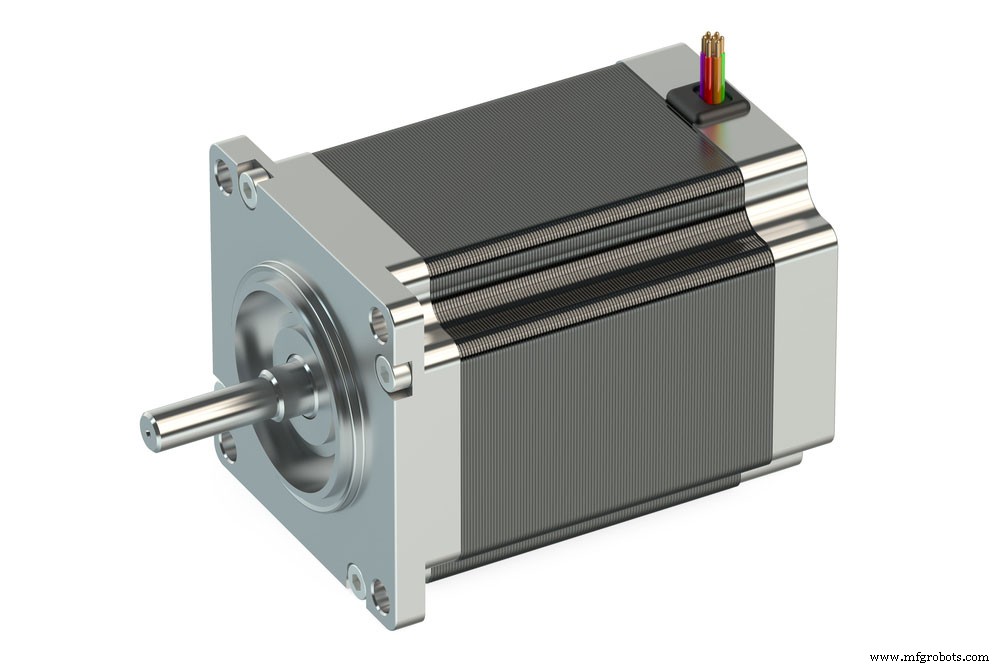
Fig 1 :Un moteur pas à pas
Définition
Il s'agit principalement d'un moteur à courant continu sans balais qui tourne par étapes discrètes.
De plus, avec le pas à pas contrôlé par ordinateur, il est possible de réaliser un contrôle de vitesse et un positionnement extrêmement précis. Par conséquent, les moteurs pas à pas sont populaires dans les utilisations de contrôle de mouvement de précision.
Composant
Il comporte plusieurs électroaimants dentés entourant un engrenage central. Cette disposition est pratique pour définir la position. De plus, un moteur pas à pas à aimant permanent utilise une alimentation en courant continu. Néanmoins, il lui manque les balais et le collecteur mécanique synonymes de moteurs à courant continu. Il s'agit donc d'un moteur à courant continu sans balais.
Principe de fonctionnement
Le moteur comporte un système de contrôle chargé d'envoyer des impulsions électriques à un conducteur. Par la suite, le conducteur décrypte les impulsions. À son tour, il transmet une tension proportionnelle au moteur.
Ensuite, le moteur tournera par incréments angulaires fixes. C'est de là qu'il tire le nom de moteur pas à pas. Notez également qu'un courant alternatif contrôle la polarité des bobines.
Avantages et limites
Les avantages du moteur pas à pas sont les suivants :

Fig 2 :Une imprimante 3D en métal
- Tout d'abord, ils sont pratiques pour faciliter les applications de positionnement précis telles que les traceurs X, Y et les imprimantes 3D.
- De plus, ils permettent un contrôle précis de la vitesse de rotation.
- Troisièmement, ils présentent un faible couple à bas régime.
- Enfin, ils sont faciles à contrôler.
Leurs limites fondamentales incluent
- Les moteurs ont un faible rendement. Ils tireront le plus de courant lorsqu'ils ne seront pas chargés.
- De plus, lorsque la vitesse du moteur est élevée, son couple est considérablement faible par rapport à un fonctionnement à basse vitesse.
- Et la plupart manquent de retour intégral sur la position. Ils sont relativement bruyants lors de leur utilisation.
- Enfin, lorsqu'ils fonctionnent à des charges élevées, ils peuvent sauter certaines étapes.
Applications
- Imprimantes 3D
- Applications d'imagerie médicale
- Caméras de sécurité
- Robotique
- Fraiseuses CNC
Servomoteur

Fig 3 :Illustration 3D d'un servomoteur
Définition
Il appartient aux types de moteurs à courant continu. Néanmoins, ce moteur synchrone ne fonctionne pas en continu pendant une période prolongée.
Composant
Principalement, ce moteur s'appuie sur un système de rétroaction pour détecter la différence entre la vitesse réelle et la vitesse souhaitée. Ainsi, la rétroaction facilite le réglage de la sortie en corrigeant une dérive par rapport à la position souhaitée. Il est pratique pour améliorer le positionnement précis.
Il existe deux types de servos, à savoir :
Servos de moteur à rotation continue
Ils peuvent tourner en continu dans le sens des aiguilles d'une montre ou dans le sens inverse des aiguilles d'une montre. En outre, ils peuvent se déplacer à différentes plages de vitesses, guidés par le signal de commande. Ainsi, ils sont utiles pour une gamme d'applications plus large que les moteurs positionnels.
Servos de rotation de position
Ils sont pratiques dans les projets à petite échelle pour obtenir un positionnement modérément précis. De plus, ils tournent à un angle de 180 degrés et n'aident pas à la rotation continue et au contrôle de la vitesse.
Principe de fonctionnement

Fig 4 :Un servomoteur
La conception du moteur intérieur présente une disposition unique des engrenages pratique pour atténuer la vitesse élevée des moteurs internes. Simultanément, il y a une augmentation significative du couple de sortie.
Par conséquent, la conception de l'engrenage des servos et la vitesse de rotation sont impératives pour générer un couple élevé. Il convient également de noter que le servo dispose d'un microcontrôleur utile pour corriger le signal d'erreur. Ces signaux de commande aident à déplacer le rotor vers la position finale.
Moteur pas à pas par rapport au moteur à courant continu – Avantages et limites
Mérite des servomoteurs
- Ils ont un couple de sortie élevé lorsqu'ils tournent à grande vitesse. Cela est principalement dû à leur système de contrôle de rétroaction en boucle fermée, qui est meilleur que le système en boucle ouverte du moteur pas à pas.
- De plus, ils sont disponibles dans une large gamme de couples nominaux et de tailles
- Enfin, ils sont relativement bon marché car certains sont en plastique, ce qui les rend également légers.
Inconvénients des servomoteurs
- Les moteurs de position ont une limitation de rotation. Ils ne peuvent tourner qu'à un angle de 180 degrés.
- En outre, ils sont synonymes de secousses lors du contrôle de position. C'est principalement à cause du mécanisme de rétroaction qui cherche à rectifier tout changement par rapport à la position prévue.
Applications
- Technologie des ascenseurs et robotique
- Télescopes et caméras
- Applications de contrôle industriel
Moteur pas à pas par rapport au moteur à courant continu – Moteurs à courant continu

Fig 5 :Nombreux moteurs à courant continu
Définition
Ce sont des dispositifs avec une bobine électromagnétique et des conducteurs dont les interactions transforment l'énergie électrique en énergie mécanique. Les deux types de moteurs à courant continu courants comprennent les moteurs sans balais et les moteurs à balais. De plus, il existe différentes tailles de moteurs à courant continu.
Composant
Il convient de noter que le nom brossé provient des deux brosses métalliques fixes qui fournissent le courant d'enroulement au moteur. Les autres composants principaux comprennent le stator statique et l'armature tournante
Moteur pas à pas contre moteur à courant continu – Principe de fonctionnement
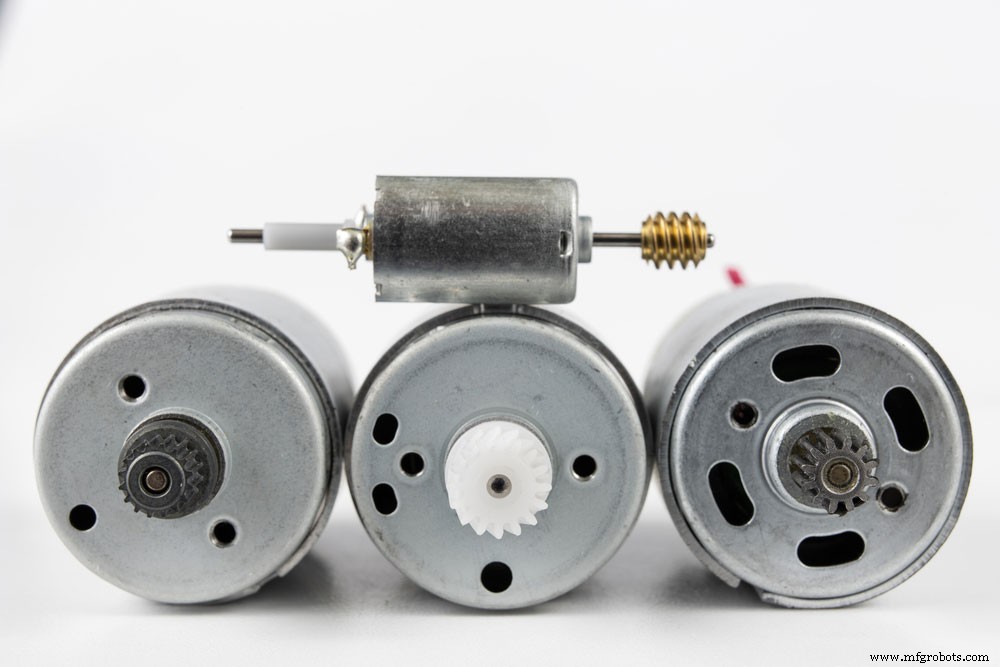
Fig 6 :Moteurs à courant continu
Le stator donne le champ magnétique tournant, qui provoque la rotation de l'induit. En outre, une paire d'aimants est pratique pour envelopper les bobines électromagnétiques en entourant les bobines. Ainsi, lorsque le courant d'enroulement dans le fil traverse un champ magnétique, il induit une force. À son tour, cela initie la rotation des bobines.
Moteur pas à pas par rapport au moteur à courant continu – Avantages et limites des moteurs à courant continu à balais
Avantages
- Ils sont faciles à contrôler car il suffit d'appliquer une tension.
- Deuxièmement, ils offrent une sortie de couple élevée à des vitesses relativement faibles. De plus, leur génération de puissance mécanique est élevée avec un rendement d'environ 75 à 80 %.
- Ils sont relativement bon marché et donc abordables.
Inconvénients
- Ils sont sujets au bruit électromagnétique et au bruit physique pendant la rotation.
- De plus, les moteurs nécessitent un entretien régulier car le taux de déchirure et d'usure des balais est considérablement élevé.
Applications
- Perceuses sans fil
- Applications industrielles
- Vibromasseurs pour téléphone portable
- Ventilateurs portables
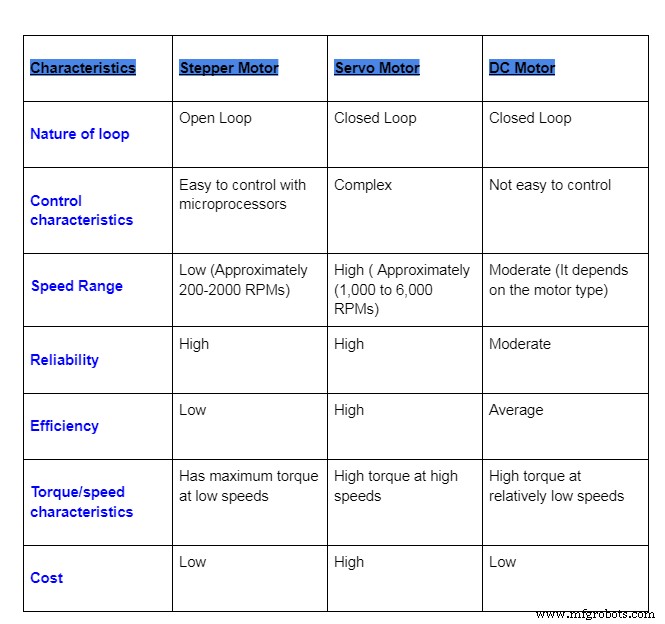
La différence entre le moteur pas à pas, le servomoteur et le moteur à courant continu
Conclusion
En un mot, ces trois moteurs sont adaptés à différentes fonctions comme nous l'avons élaboré. Vous avez maintenant toutes les principales différences entre les trois types de moteurs. Cependant, s'il y a des précisions supplémentaires que vous souhaitez apporter, parlez-nous.
Technologie industrielle
- Moteurs à induction monophasés
- Moteurs à collecteur AC
- Prototype Raspoulette
- Moteurs électriques surdimensionnés :faut-il les remplacer ?
- Comment vérifier un moteur CC
- Qu'est-ce qu'un planificateur de maintenance ?
- Qu'est-ce qu'un moteur linéaire ?
- Qu'est-ce qu'un servomoteur ?
- Qu'est-ce que la fabrication sous contrat ?