


Logique à relais dans la programmation d'automates :principes fondamentaux et exemples concrets
La logique à relais est l'un des cinq langages de programmation définis par la norme CEI 61131‑3. Il reste le plus largement adopté en raison de sa représentation intuitive de style schématique qui reflète la logique de relais câblée.
À la fin de cet article, vous serez en mesure de lire un programme industriel typique et de comprendre précisément comment fonctionne la logique de contrôle d'une machine.
Vous préférez une présentation visuelle ? Regardez la vidéo ci-dessous ou continuez à lire pour une explication détaillée, étape par étape.
Schéma électrique
Le premier langage API a été créé pour ressembler à un schéma à contacts électrique, le rendant immédiatement familier aux électriciens et aux techniciens de maintenance. Au-delà de l'esthétique, ce format facilite un dépannage rapide :voir un réseau évalué à Vrai ou Faux est beaucoup plus rapide que le débogage du code ligne par ligne.
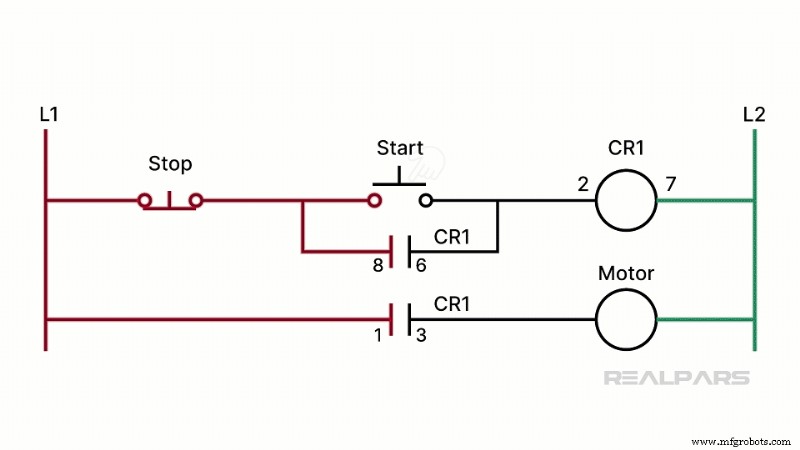
Vous trouverez ci-dessous un circuit classique de démarrage/arrêt d’un moteur. Le bouton de démarrage, le bouton d'arrêt et le relais de commande (CR1) sont câblés ensemble de sorte qu'appuyer sur le bouton de démarrage alimente CR1. Une fois CR1 sous tension, les contacts 8 et 6 se ferment, gardant CR1 alimenté même après le relâchement du bouton de démarrage. Les contacts 1 et 3 se ferment alors pour alimenter le moteur. Le relâchement du bouton d'arrêt ouvre le chemin vers CR1, provoquant l'arrêt du moteur.
Dans la pratique industrielle, la version échelle de relais de ce circuit est préférée car elle cartographie clairement les actions du circuit. Les anciennes conceptions câblées nécessitaient un recâblage en cas de panne d'un composant :les automates éliminent ce besoin en supprimant le câblage physique et la plupart du matériel.
Fonctionnement de la logique à relais
Dans une séquence de démarrage/arrêt de moteur basée sur un API, les boutons de démarrage et d'arrêt deviennent des entrées API distinctes. Le moteur lui-même est piloté par une sortie PLC. Le programme de logique à relais évalue l'état des entrées et contrôle la sortie en conséquence.
Instructions de base de l'automate
Tous les fournisseurs d'automates utilisent des symboles graphiques largement identiques, bien que les noms diffèrent. Les trois instructions les plus courantes sont :
- Contact normalement ouvert (NO) – Siemens dit NON; Allen‑Bradley utilise XIC (Examine If Closed). Un contact fermé renvoie TRUE , un contact ouvert FAUX .
- Contact normalement fermé (NC) – Siemens l'appelle NC; Allen‑Bradley utilise XIO (Examine If Open). Fermé est égal à TRUE , ouvert est égal à FALSE .
- Bobine (énergie de sortie) – Siemens appelle cela une bobine ; Allen‑Bradley l'appelle OTE. La bobine change l'état d'une sortie lorsque la ligne est évaluée à TRUE .
Ces symboles sont purement visuels; ils ne représentent pas des contacts physiques.
Construction d'un barreau d'échelle
Considérez les lignes verticales gauche et droite comme des rails d'alimentation. Un échelon relie le rail gauche au rail droit via une série d'instructions. Le rail gauche fournit l'alimentation logique; pour une sortie sur le rail droit à alimenter, un chemin continu de VRAI des instructions doivent exister.
Dans l'exemple de démarrage du moteur, l'échelon peut indiquer :Start_Button → Bouton_Stop → Démarrage_Moteur . Lorsque le bouton de démarrage est enfoncé, l'instruction Start_Button devient TRUE , créant un chemin logique qui dynamise Motor_Start. La bobine Motor_Start écrit alors un TRUE valeur à son emplacement mémoire désigné, qui à son tour entraîne le moteur.
L'instruction Motor_Start étant une bobine, elle reste VRAI une fois le bouton de démarrage relâché, création d'un verrou qui maintient le moteur en marche jusqu'à ce que le bouton d'arrêt soit enfoncé, ce qui définit l'instruction Stop_Button sur FALSE et brise le chemin logique.
Analyse d'une logique d'échelle de porte basculante
Examinons un exemple plus complexe :un contrôleur de porte basculante. La console dispose de trois boutons poussoirs et de trois voyants lumineux. La logique d'échelon montre que le Door_Shut l'instruction est VRAIE (donc le voyant SHUT est allumé) pendant que Door_Ajar est FAUX (Le voyant AJAR est éteint).
Notez que l'instruction STOP est un XIO (normalement fermé). Puisque c'est actuellement VRAI , la mémoire de l'automate contient un 0 logique , indiquant que l'interrupteur physique STOP est normalement ouvert.
Cours connexe
Programmation API
Apprenez à programmer des automates dans un format pratique et pratique. Les cours couvrent Allen‑Bradley, Siemens, Omron, CODESYS, Wago, Schneider et plus encore.
Récapitulatif
Nous vous avons fait passer d'un diagramme apparemment énigmatique à une compréhension claire de la façon dont la logique à relais traduit les entrées physiques en actions de la machine. Que vous interprétiez un contact NO Siemens, un XIC Allen‑Bradley ou une bobine Phoenix Contact, la logique sous-jacente reste la même :suivez les états VRAI et FAUX pour découvrir le comportement du système.
Système de contrôle d'automatisation
- Les commandes de machines-outils baissent en septembre
- Novanta s'associe à MassRobotics pour "faire progresser la prochaine génération de robotique"
- L'automatisation assistée en action :trois scénarios réels
- Comment l'automatisation intelligente devient plus intelligente parmi les travailleurs numériques
- Open Mind revient sur 25 ans et sur l'avenir
- Les organisations britanniques leaders dans l'adoption de l'automatisation commerciale
- Guide pas à pas de configuration d'un variateur PowerFlex 525 dans Connected Components Workbench
- Bosch et Daimler piloteront la conduite automatisée en Californie
- UiPath lève 225 millions de dollars dans le cadre d'un cycle de financement de série E