


Les chipsets radar d'imagerie 4D améliorent l'identification des objets
Le radar devient chaud, en particulier avec les avancées qui promettent l'identification/la classification des objets et une résolution plus élevée en latitude - quelque chose que les radars traditionnels ne pourraient pas faire. Avec ces nouvelles innovations, les radars s'imposent comme le capteur le plus recherché par les constructeurs automobiles et les premiers constructeurs développant des véhicules hautement automatisés.
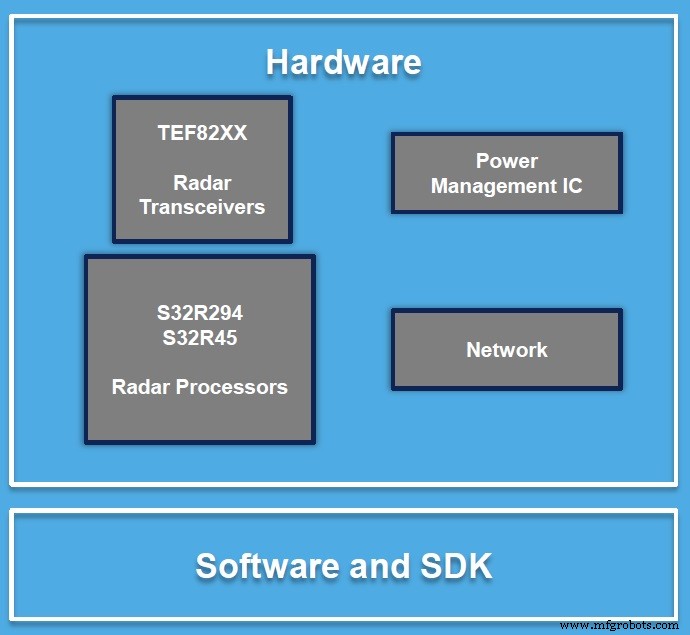
Solution de système radar (Source :NXP)
Répondant aux attentes élevées de l'industrie automobile, NXP Semiconductors a annoncé qu'il testait une suite de nouveaux chipsets de capteurs radar, comprenant le processeur radar S32R45 de l'entreprise et de nouveaux émetteurs-récepteurs à 77 GHz appelés TEF82xx.
NXP, qui a été le pionnier des radars RF CMOS avec sa première puce radar appelée « Dolphin » il y a cinq ans, est l'un des principaux fournisseurs de solutions de radars automobiles.
Les capteurs d'imagerie 4D de NXP peuvent mesurer non seulement la portée et la vitesse, mais aussi « l'altitude, la direction et l'angle d'arrivée, tout en identifiant des objets à une résolution beaucoup plus élevée », a expliqué Torsten Lehmann, vice-président exécutif et directeur général du traitement des radiofréquences, lors de une interview avec EE Times . Avec un radar d'imagerie 4D qui peut comprendre non seulement les plans horizontaux mais aussi verticaux, un véhicule peut, par exemple, déterminer s'il doit conduire « en dessous » ou « au-dessus » d'un objet, a déclaré Lehman.
"Imaginez une scène où un véhicule roule à 80 kilomètres par heure sur une autoroute, tandis qu'une moto - un petit objet à faible réflectivité - vient de derrière à 200 kilomètres par heure", a-t-il déclaré. Contrairement aux caméras et aux lidars, ces nouveaux radars améliorés peuvent identifier la moto, initialement éloignée, et reconnaître que ces deux objets se déplacent à deux vitesses différentes, a expliqué Lehmann.

(Source :NXP)
Jusqu'à présent, le radar a été le seul capteur capable de fonctionner à plus de 300 mètres, reconnaissant des objets courant à grande vitesse. Ni les caméras ni les lidars ne peuvent gérer autant de distance et de vitesse.
Avec l'émergence de radars d'imagerie à plus haute résolution, de nombreux fournisseurs de radars, y compris NXP, sont impatients de faire des radars le seul capteur à grande vitesse capable de fonctionner dans les pires conditions météorologiques et d'éclairage.
Évolutivité
NXP n'est pas le seul à parler de radar d'imagerie 4D. Continental a annoncé en septembre dernier qu'elle utilisait des FPGA Xilinx pour déployer le premier radar d'imagerie 4D prêt pour la production de l'industrie automobile, qui devrait être expédié dans des véhicules de tourisme en 2021.
Compte tenu de l'expérience de production en volume de NXP avec des émetteurs-récepteurs RF CMOS à 77 GHz et de son processeur radar S32R45, NXP affirme que son jeu de puces radar d'imagerie 4D peut réduire considérablement les coûts et l'efficacité énergétique par rapport à la mise en œuvre FPGA à usage général. NXP, cependant, s'est abstenu de spécifier le degré de réduction des coûts/puissance.
Phil Magney, fondateur et président de VSI Labs, nous a dit :« Nous suivons de près cet espace depuis quelques années maintenant. Ironiquement, la première fois que j'en ai entendu parler, c'était lors d'une présentation NXP il y a quelques années. À cette époque, il était présenté comme un concurrent potentiel du lidar car les nouveaux radars pouvaient produire un nuage de points. »
De toute évidence, NXP prépare le lancement de son radar d'imagerie 4D depuis un certain temps.
Mais le pitch de NXP est en train de changer. Au lieu de simplement parler de sa capacité à produire des nuages de points, l'accent de l'entreprise s'est maintenant déplacé vers l'évolutivité offerte par une suite de ses nouvelles solutions radar.
NXP vante désormais « une plate-forme commune qui s'adapte à différents cas d'utilisation », allant du radar d'angle et du radar frontal à longue portée au radar d'imagerie. Ceci est important pour une industrie à la recherche de technologies pour satisfaire aux exigences du programme d'évaluation des voitures neuves (NCAP) exigeant de meilleures performances dans les angles morts et les fonctions de freinage d'urgence automatique. Bien que NCAP ne spécifie pas les technologies de capteurs préférées, les constructeurs automobiles - pressés de répondre aux exigences NCAP - recherchent de meilleures technologies radar capables de détecter des objets dans les coins et à l'avant, a expliqué Lehmann.
cliquez pour l'image en taille réelle
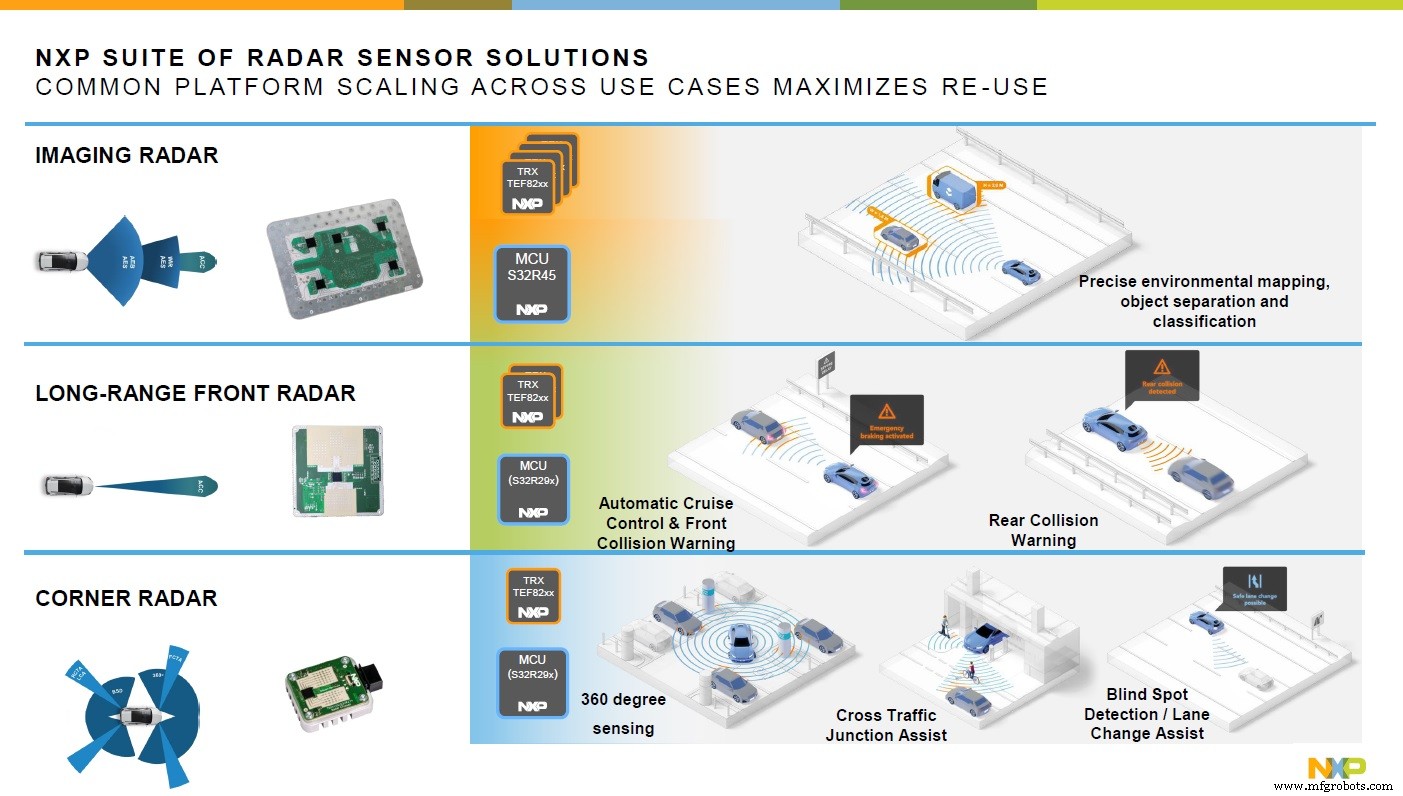
(Source :NXP)
Pour la détection des angles morts et l'assistance de voie dans les véhicules de niveau 1 et 2, une combinaison de l'émetteur-récepteur unique TEF82xx de NXP et du processeur radar S32R45 fonctionne. L'ajout d'un régulateur de vitesse automatique et d'un avertissement de collision avant et arrière aux voitures L2 et L3 nécessiterait deux émetteurs-récepteurs au lieu d'un. Pour la séparation et la classification des objets exigées par les véhicules autonomes L4 et L5, les équipementiers peuvent combiner quatre émetteurs-récepteurs en cascade avec un processeur radar.
La clé est que tout au long de la transition vers une automatisation plus poussée, les constructeurs automobiles qui doivent s'adresser à diverses marques et modèles devraient pouvoir utiliser une plate-forme unique conçue pour réutiliser les logiciels et le matériel.
Passage au radar d'imagerie 4D
L'évolution des radars automobiles, cependant, est brouillée par le jargon marketing.
Les radars traditionnels - parfois appelés 2D - sont devenus des radars d'imagerie. « Le radar imageur crée essentiellement un réseau grâce auquel la densité des mesures augmente considérablement », a expliqué Magney. « Le radar 2D traditionnel est grossier en comparaison et ne produit qu'un seul point par objet. Mais un radar d'imagerie produirait de nombreux points pour mieux comprendre ce qui est suivi. Pour résumer, a-t-il noté, « le radar d'imagerie produit une résolution verticale grâce à laquelle le radar traditionnel fonctionne à partir d'un seul plan ».
En quoi les radars d'imagerie 3D et 4D sont-ils alors différents ?
« Je pense que le temps est utilisé dans la quatrième dimension. J'ai également entendu cela de quelques autres entreprises et c'est ainsi qu'elles l'utilisent », a noté Magney. Mais il a ajouté :« Honnêtement, 4D est plus un battage publicitaire qu'autre chose, car l'élément temporel est dérivé du Doppler. Donc, si tel était le cas, alors, la 2D traditionnelle pourrait être appelée 3D. »
En d'autres termes, l'élément temps a toujours été essentiel à l'offre des radars. Posé à la même question, Lehman de NXP a noté que le quatrième élément du capteur d'imagerie 4D est la « résolution latérale ». Le radar d'imagerie 4D saisit mieux l'environnement, déterminant si un véhicule peut voler sous ou au-dessus d'un objet.
Résolution de latitude
Une "résolution de latitude plus élevée" se traduit par une plus grande résolution verticale, a noté Magney. "C'est en soi l'une des caractéristiques les plus importantes."
Cette discussion évoque le cas Joshua Brown. La berline Tesla Model S de Brown a tué le conducteur, entrant en collision avec un semi-remorque croisant son chemin sur l'autoroute américaine 27A en Floride en mai 2016. Il est largement rapporté que la Tesla, équipée de caméras et d'un radar 2D traditionnel, supposait que la voiture pouvait passer sous le plate-forme géante, et j'ai foncé dedans.

La photo montre le côté droit de la semi-remorque. La zone dans l'ovale rouge met en évidence les dommages causés par la collision de la Tesla S de Joshua Brown (Source :National Transportation Safety Board)
Un capteur d'imagerie 4D aurait-il pu empêcher un accident aussi mortel ? Magney a déclaré :« Oui, ce type de radar ne serait pas sujet aux faux positifs provenant du radar traditionnel. Et cela n'aurait pas permis l'accident de Tesla. »
Émetteurs-récepteurs et traitement radar plus performants
Le nouveau TEF82xx de NXP - 75 mm x 75 mm - est construit sur son RFCMOS de deuxième génération basé sur la technologie de processus 40 nm. La société affirme qu'elle peut doubler les performances RF pour une détection améliorée, par rapport à la version précédente.
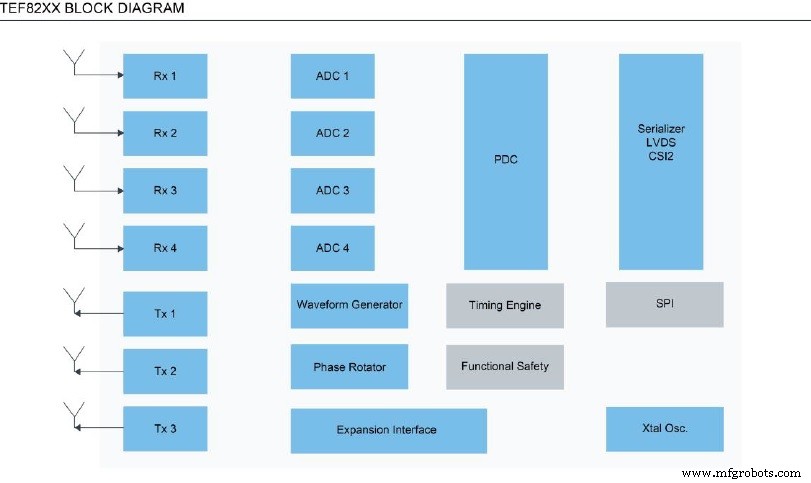
La nouvelle puce d'émetteur-récepteur offre également une réduction du bruit de phase 4X autour de la cible, permettant d'offrir une meilleure séparation des objets. Il est livré avec un rotateur de phase 6 bits pour les applications d'orientation de faisceau et une prise en charge avancée de la modulation MIMO.
Le nouveau radar S32R45 de NXP est construit sur le processus FinFET 16 nm. Il offre une prise en charge d'émetteurs-récepteurs en cascade jusqu'à 4X pour « une cartographie précise de l'environnement et une meilleure compréhension de la scène » dans les véhicules L4 et L5, selon la société.
cliquez pour l'image en taille réelle
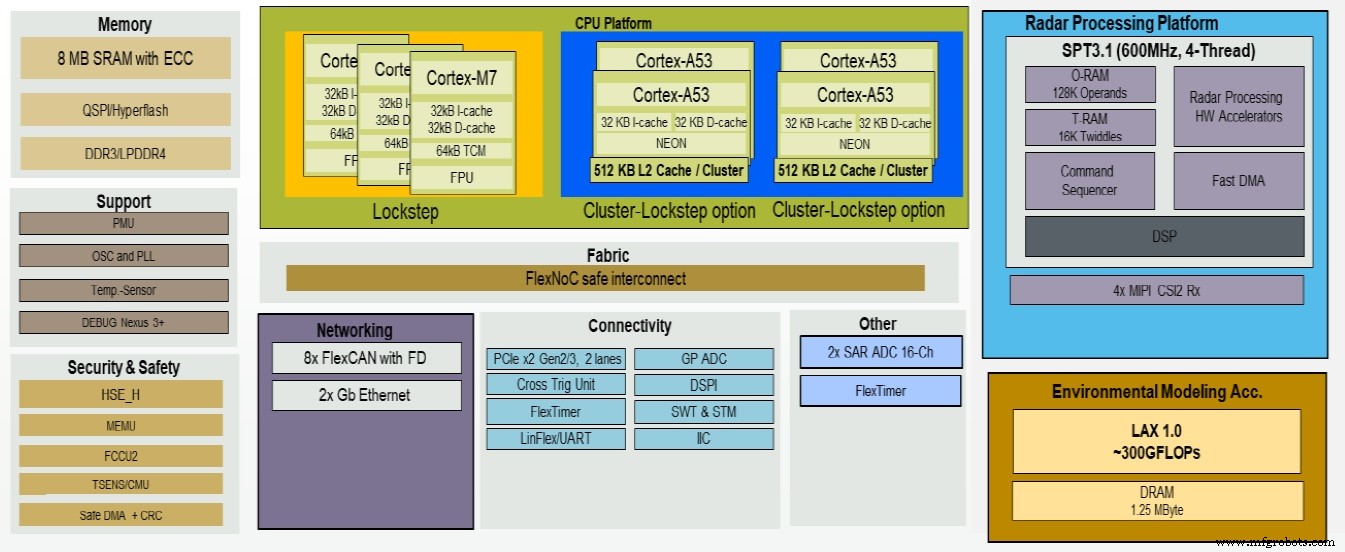
Schéma fonctionnel S32R45. (Source :NXP)
Il est important de noter que le S32R45 est capable de nouvelles accélérations radar. Plus précisément, il propose un nouvel «accélérateur radar d'algèbre linéaire» offrant des performances jusqu'à 64X par rapport à un cœur ARM A53, selon NXP. Cela se traduit par l'exécution "d'algorithmes de direction d'arrivée (DoA) à super résolution et d'un véritable fonctionnement MIMO même dans des conditions météorologiques défavorables", a déclaré NXP.
Débat renouvelé :lidar vs radar
NXP affirme que son nouveau radar d'imagerie 4D offre une résolution angulaire inférieure à 1 degré. Mais comment se compare-t-il au lidar ?
Lehman a noté :« Si vous parlez d'un lidar hautes performances, comme un type rotatif mécanique utilisé par Waymo, il peut produire des nuages de points beaucoup plus granulaires, car il offre une résolution angulaire inférieure à 0,1° ou 0,5°. Il a ajouté, mais un tel lidar est « encombrant et coûte des milliers de dollars ».
Magney a observé :« Il y a une rumeur selon laquelle Tesla envisage un radar d'imagerie pour la plate-forme du modèle 3 et ce serait une bonne décision, car cela fournit une meilleure réponse pour ne pas utiliser le lidar. » Le démontage de System Plus Consulting a révélé que Tesla utilisait le radar 2D de Continental, comme rapporté par EE Times .
Cependant, selon Magney, Tesla est passé de Continental à Bosch pour une plus grande autonomie. Il a expliqué qu'il s'agit de deux radars 2D avec les limites des radars traditionnels. « En ce qui me concerne, un passage au radar d'imagerie par Tesla serait judicieux. Comprenez que le radar d'imagerie produit un nuage de points. Même s'il est d'une résolution inférieure à celle du Lidar, il s'agit [encore] d'une énorme amélioration par rapport au radar traditionnel », a déclaré Magney.
En résumé, cependant, Magney a souligné :« Je ne suis pas encore sur le point de jeter du lidar sous le bus. »
À son avis, le lidar a maintenant un énorme avantage sur le radar, même si cet écart pourrait se réduire avec les nouveaux radars. « L'une des principales applications du lidar est sa capacité à effectuer une localisation relative par rapport à une carte de base. C'est vital pour les robots et les navettes urbains et je ne pense pas que vous puissiez remplacer le lidar pour cette tâche. »
Magney a conclu :« Le lidar ne disparaîtra pas même si le radar 4D arrive. Plutôt que de déplacer le lidar, on pourrait dire que les nouveaux radars surmontent certaines des limitations des radars traditionnels. »
Disponibilité
Le nouveau jeu de puces radar de NXP, échantillonné aujourd'hui, sera produit en volume en 2021. Le radar d'angle, le radar avant et le radar d'imagerie 4D seront commercialisés sur plusieurs mois en 2021, mais les trois seront disponibles au second semestre, a déclaré Lehman. Il a refusé de commenter les prix.
>> Cet article a été initialement publié le notre site partenaire, EE Times.
Embarqué
- Classe et objet C#
- Classe Java Singleton
- Apacer dévoile une nouvelle identification de produit industriel
- Micropuce :la solution PolarFire basée sur FPGA permet la vidéo et l'imagerie 4K au plus petit facteur de forme
- Kymati développe des solutions radar personnalisées
- Débuts du processeur radar d'imagerie automobile à 30 ips
- La puce radar de faible puissance utilise des réseaux de neurones à pointes
- Manhattan Skyline :ARM COM compact avec NXP i.MX 8MM
- congatec :nouveau module SMARC avec processeur NXP i.MX 8M Mini