


Projet de radar Arduino
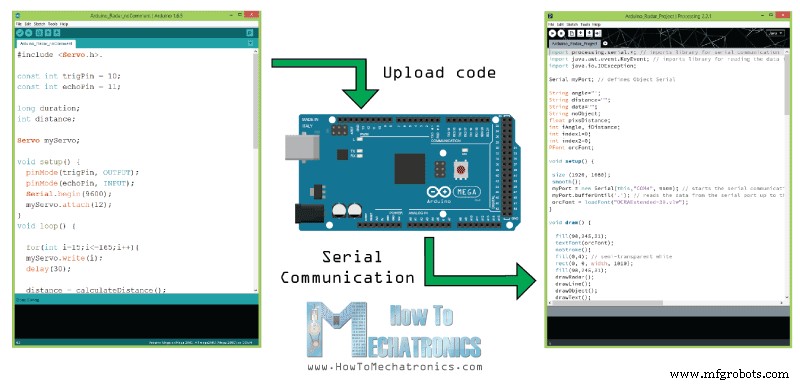
Dans ce didacticiel Arduino, je vais vous montrer comment créer ce radar à l'allure cool à l'aide de la carte Arduino et de l'environnement de développement de traitement. Vous pouvez regarder la vidéo suivante ou lire le didacticiel écrit ci-dessous pour plus de détails.
Tout ce dont vous avez besoin pour ce projet Arduino est un capteur à ultrasons pour détecter les objets, un petit servomoteur amateur pour faire tourner le capteur et une carte Arduino pour les contrôler. Vous pouvez regarder la vidéo suivante ou lire le didacticiel écrit ci-dessous.[/column]
Vous pouvez obtenir ces composants sur l'un des sites ci-dessous :
Il existe également des supports de montage spéciaux pour le capteur à ultrasons de Banggod. Vous pouvez les obtenir à partir des liens suivants :
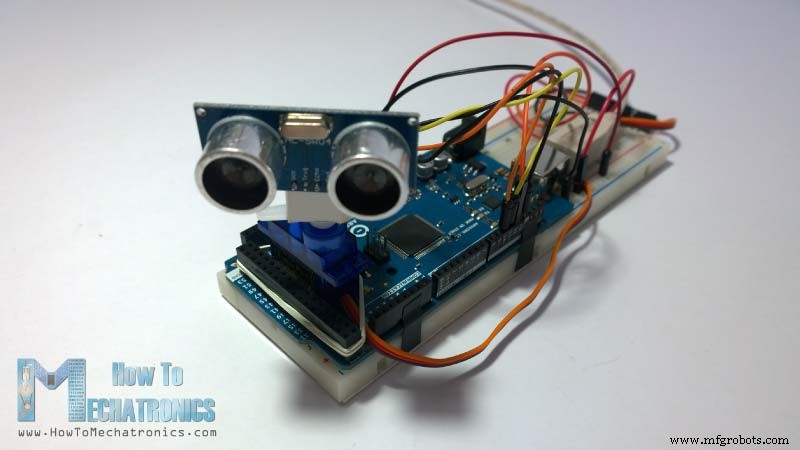
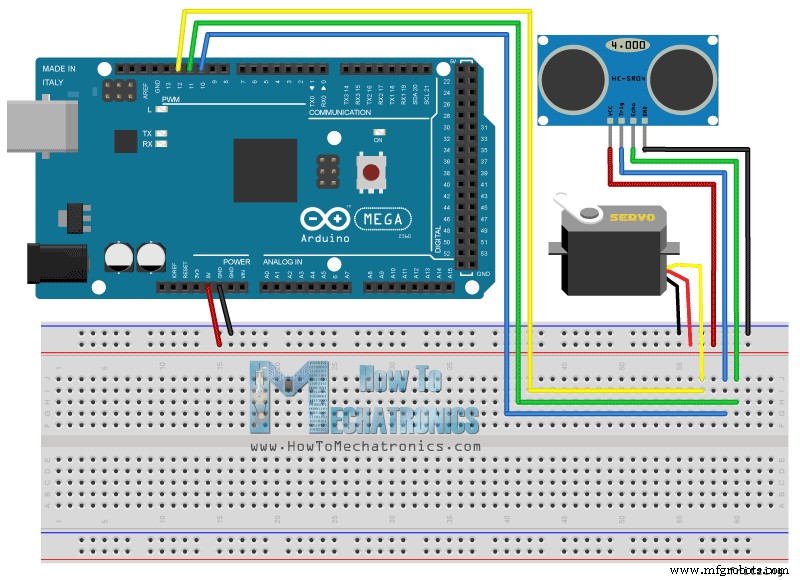
J'ai connecté le capteur à ultrasons HC-SR04 aux broches numéro 10 et 11 et le servomoteur à la broche numéro 12 sur la carte Arduino.
Nous devons maintenant créer un code et le télécharger sur la carte Arduino qui permettra l'interaction entre l'Arduino et l'IDE de traitement. Pour comprendre le fonctionnement de la connexion, cliquez ici pour visiter mon tutoriel Arduino et traitement.
Nous allons maintenant recevoir les valeurs de l'angle et de la distance mesurées par le capteur de la carte Arduino dans l'IDE de traitement à l'aide de SerialEvent() fonction qui lit les données du port série et nous mettrons les valeurs de l'angle et de la distance dans les variables iAngle et iDistance. Ces variables seront utilisées pour dessiner le radar, les lignes, les objets détectés et une partie du texte.
Pour dessiner le radar, j'ai créé cette fonction drawRadar() qui se composent de arc() et ligne() fonctions.
Pour dessiner la ligne qui se déplace le long du radar, j'ai créé cette fonction drawLine() . Son centre de rotation est défini avec la fonction translate() et en utilisant la fonction line() dans laquelle la variable iAngle est utilisée, la ligne est redessinée pour chaque degré.
Pour dessiner les objets détectés, j'ai créé ce drawObject() fonction. Il obtient la distance du capteur à ultrasons, la transforme en pixels et, en combinaison avec l'angle du capteur, dessine l'objet sur le radar.
Pour le texte à l'écran, j'ai créé le drawText() fonction qui dessine des textes sur des emplacements particuliers.
Toutes ces fonctions sont appelées dans le fichier principal draw() fonction qui se répète tout le temps et dessine l'écran. Ici aussi, j'utilise thisfill() fonction avec 2 paramètres pour simuler le flou de mouvement et le fondu lent de la ligne en mouvement.
Voici l'apparence finale du radar :
Voici le code source de traitement complet du radar Arduino :
Modifiez simplement les valeurs dans la fonction size(), avec la résolution de votre écran.Aperçu
Composants nécessaires pour ce projet Arduino
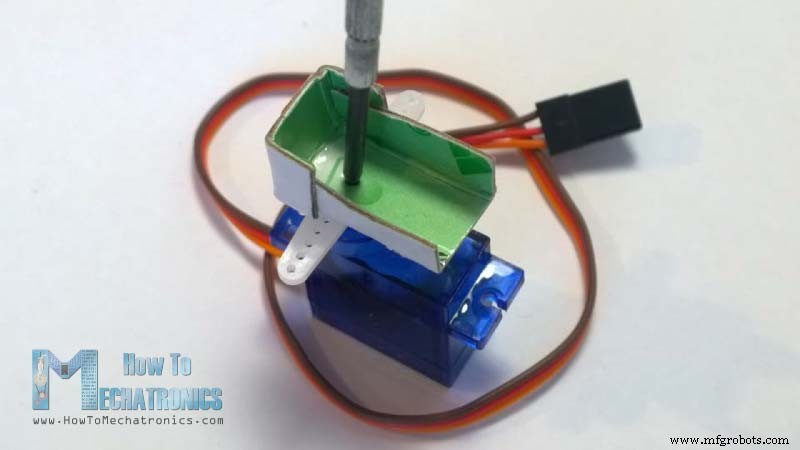
Construire l'appareil

Schémas du circuit radar Arduino
Codes sources
Voici le code source Arduino avec la description de chaque ligne de le code :
// Includes the Servo library
#include <Servo.h>.
// Defines Tirg and Echo pins of the Ultrasonic Sensor
const int trigPin = 10;
const int echoPin = 11;
// Variables for the duration and the distance
long duration;
int distance;
Servo myServo; // Creates a servo object for controlling the servo motor
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600);
myServo.attach(12); // Defines on which pin is the servo motor attached
}
void loop() {
// rotates the servo motor from 15 to 165 degrees
for(int i=15;i<=165;i++){
myServo.write(i);
delay(30);
distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree
Serial.print(i); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
}
// Repeats the previous lines from 165 to 15 degrees
for(int i=165;i>15;i--){
myServo.write(i);
delay(30);
distance = calculateDistance();
Serial.print(i);
Serial.print(",");
Serial.print(distance);
Serial.print(".");
}
}
// Function for calculating the distance measured by the Ultrasonic sensor
int calculateDistance(){
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds
distance= duration*0.034/2;
return distance;
}
Code language: Arduino (arduino)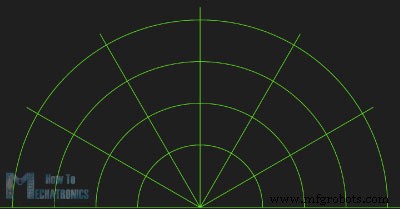
void drawRadar() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
// draws the angle lines
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
}Code language: Arduino (arduino)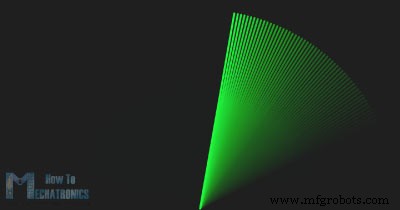
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(960,1000); // moves the starting coordinats to new location
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}Code language: Arduino (arduino)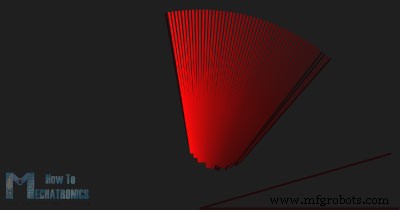
void drawObject() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
}
popMatrix();
}Code language: Arduino (arduino)void draw() {
fill(98,245,31);
textFont(orcFont);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}Code language: Arduino (arduino)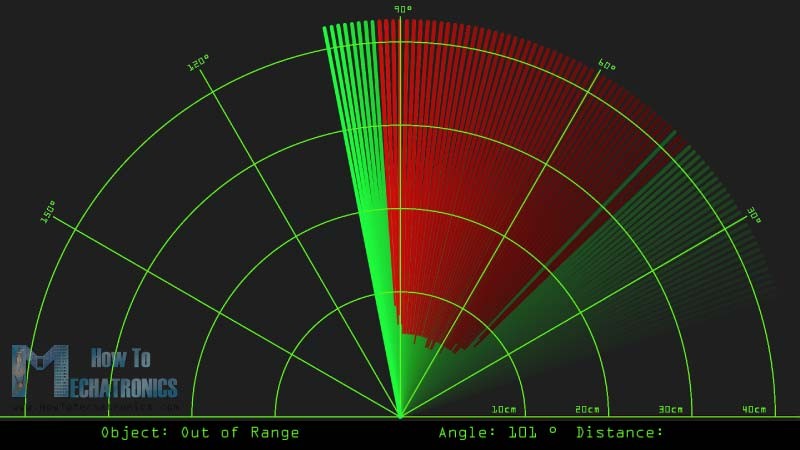
import processing.serial.*; // imports library for serial communication
import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
import java.io.IOException;
Serial myPort; // defines Object Serial
// defubes variables
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1920, 1080);
smooth();
myPort = new Serial(this,"COM4", 9600); // starts the serial communication
myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
orcFont = loadFont("OCRAExtended-30.vlw");
}
void draw() {
fill(98,245,31);
textFont(orcFont);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) { // starts reading data from the Serial Port
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
// converts the String variables into Integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
// draws the angle lines
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(960,1000); // moves the starting coordinats to new location
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}
void drawText() { // draws the texts on the screen
pushMatrix();
if(iDistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, 1010, width, 1080);
fill(98,245,31);
textSize(25);
text("10cm",1180,990);
text("20cm",1380,990);
text("30cm",1580,990);
text("40cm",1780,990);
textSize(40);
text("Object: " + noObject, 240, 1050);
text("Angle: " + iAngle +" °", 1050, 1050);
text("Distance: ", 1380, 1050);
if(iDistance<40) {
text(" " + iDistance +" cm", 1400, 1050);
}
textSize(25);
fill(98,245,60);
translate(961+960*cos(radians(30)),982-960*sin(radians(30)));
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate(954+960*cos(radians(60)),984-960*sin(radians(60)));
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate(945+960*cos(radians(90)),990-960*sin(radians(90)));
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(935+960*cos(radians(120)),1003-960*sin(radians(120)));
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate(940+960*cos(radians(150)),1018-960*sin(radians(150)));
rotate(radians(-60));
text("150°",0,0);
popMatrix();
}
Code language: Arduino (arduino)Nouvelle version mise à jour du code Arduino Radar pour s'adapter à n'importe quelle résolution d'écran :
/* Arduino Radar Project
*
* Updated version. Fits any screen resolution!
* Just change the values in the size() function,
* with your screen resolution.
*
* by Dejan Nedelkovski,
* www.HowToMechatronics.com
*
*/
import processing.serial.*; // imports library for serial communication
import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
import java.io.IOException;
Serial myPort; // defines Object Serial
// defubes variables
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1920, 1080); // ***CHANGE THIS TO YOUR SCREEN RESOLUTION***
smooth();
myPort = new Serial(this,"COM4", 9600); // starts the serial communication
myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
orcFont = loadFont("OCRAExtended-30.vlw");
}
void draw() {
fill(98,245,31);
textFont(orcFont);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, height-height*0.065);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) { // starts reading data from the Serial Port
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
// converts the String variables into Integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI);
arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI);
arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI);
arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI);
// draws the angle lines
line(-width/2,0,width/2,0);
line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90)));
line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120)));
line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150)));
line((-width/2)*cos(radians(30)),0,width/2,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*((height-height*0.1666)*0.025); // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),(width-width*0.505)*cos(radians(iAngle)),-(width-width*0.505)*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
line(0,0,(height-height*0.12)*cos(radians(iAngle)),-(height-height*0.12)*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}
void drawText() { // draws the texts on the screen
pushMatrix();
if(iDistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, height-height*0.0648, width, height);
fill(98,245,31);
textSize(25);
text("10cm",width-width*0.3854,height-height*0.0833);
text("20cm",width-width*0.281,height-height*0.0833);
text("30cm",width-width*0.177,height-height*0.0833);
text("40cm",width-width*0.0729,height-height*0.0833);
textSize(40);
text("Object: " + noObject, width-width*0.875, height-height*0.0277);
text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277);
text("Distance: ", width-width*0.26, height-height*0.0277);
if(iDistance<40) {
text(" " + iDistance +" cm", width-width*0.225, height-height*0.0277);
}
textSize(25);
fill(98,245,60);
translate((width-width*0.4994)+width/2*cos(radians(30)),(height-height*0.0907)-width/2*sin(radians(30)));
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate((width-width*0.503)+width/2*cos(radians(60)),(height-height*0.0888)-width/2*sin(radians(60)));
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate((width-width*0.507)+width/2*cos(radians(90)),(height-height*0.0833)-width/2*sin(radians(90)));
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(width-width*0.513+width/2*cos(radians(120)),(height-height*0.07129)-width/2*sin(radians(120)));
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate((width-width*0.5104)+width/2*cos(radians(150)),(height-height*0.0574)-width/2*sin(radians(150)));
rotate(radians(-60));
text("150°",0,0);
popMatrix();
}Code language: Arduino (arduino)
Processus de fabrication
- Créer un moniteur Ambilight à l'aide d'Arduino
- Jeu Arduino Pong - Écran OLED
- Obstacles pour éviter le robot avec servomoteur
- Détecteur de fréquence audio
- clone Arduino Tamagotchi - animal numérique
- Manipulateur d'interrupteur d'éclairage sans fil
- Tech-TicTacToe
- Pistolet à eau à détecteur de mouvement
- compte à rebours Arduino